
Dual-Mode Square Root Cubature Kalman Filter for Miniaturized Underwater Profiler Dead Reckoning
 , , , ,
, , , ,
Abstract
:1. Introduction
2. Structure and Modeling of the Miniaturized Underwater Profiler
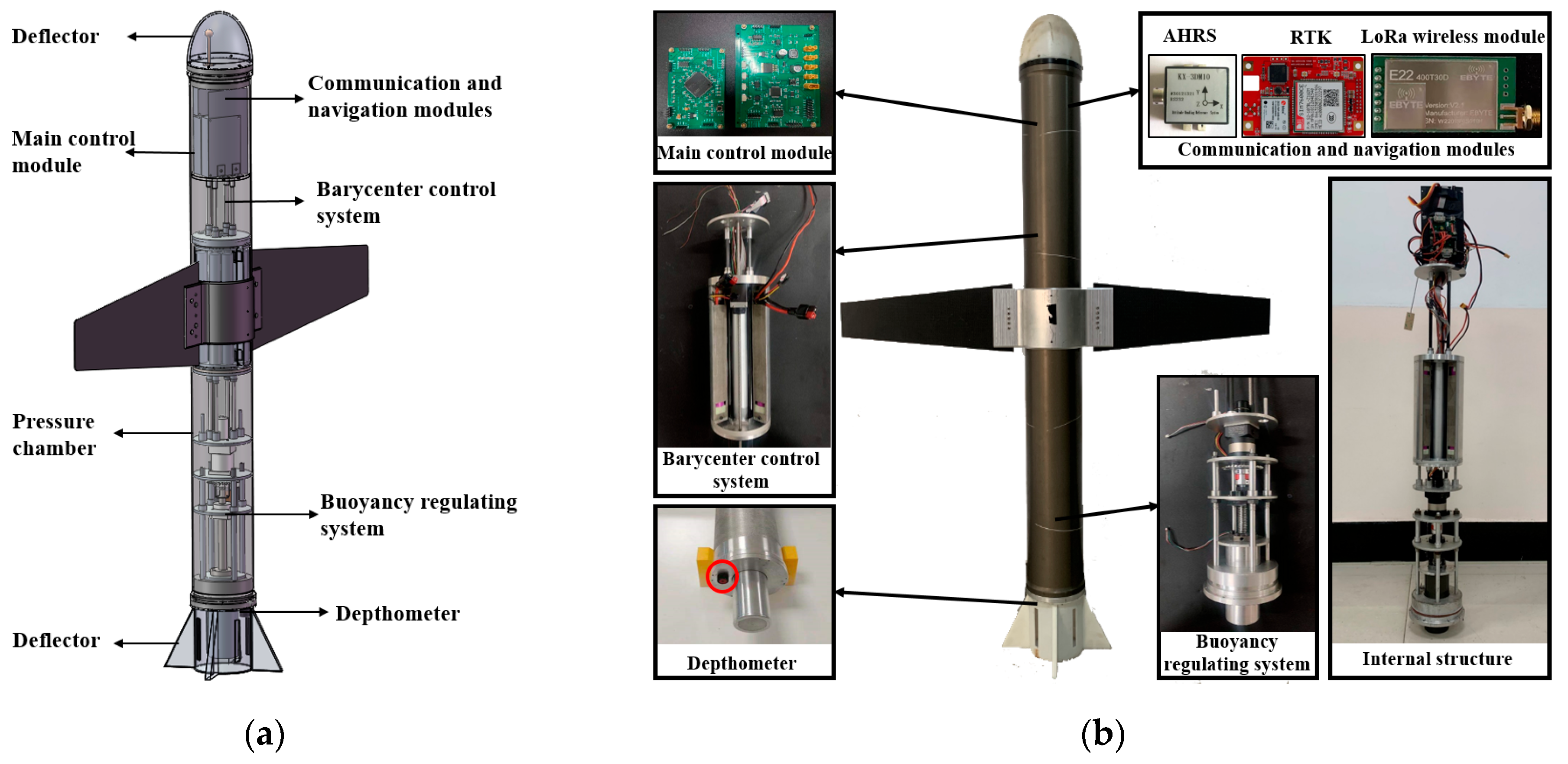
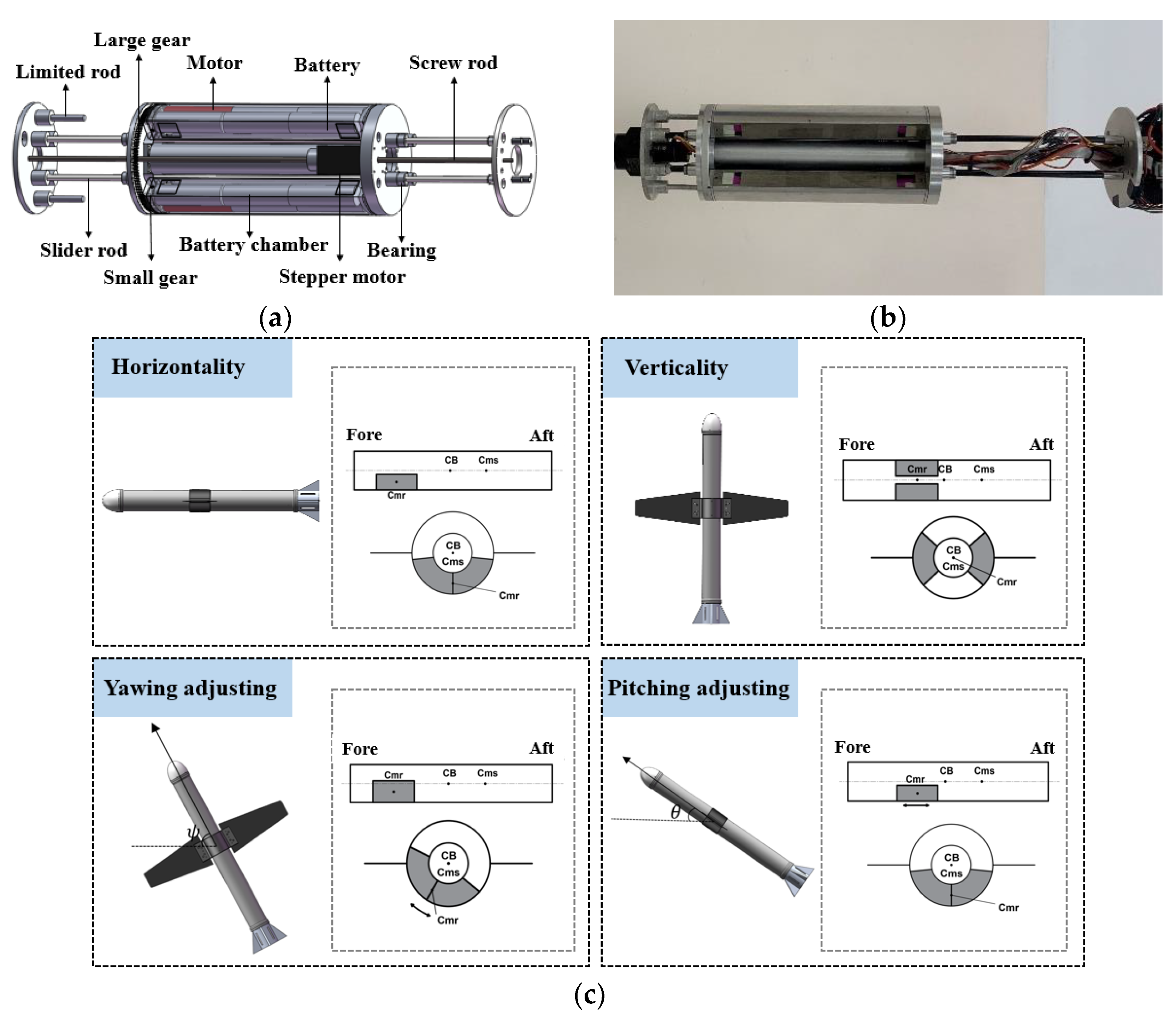
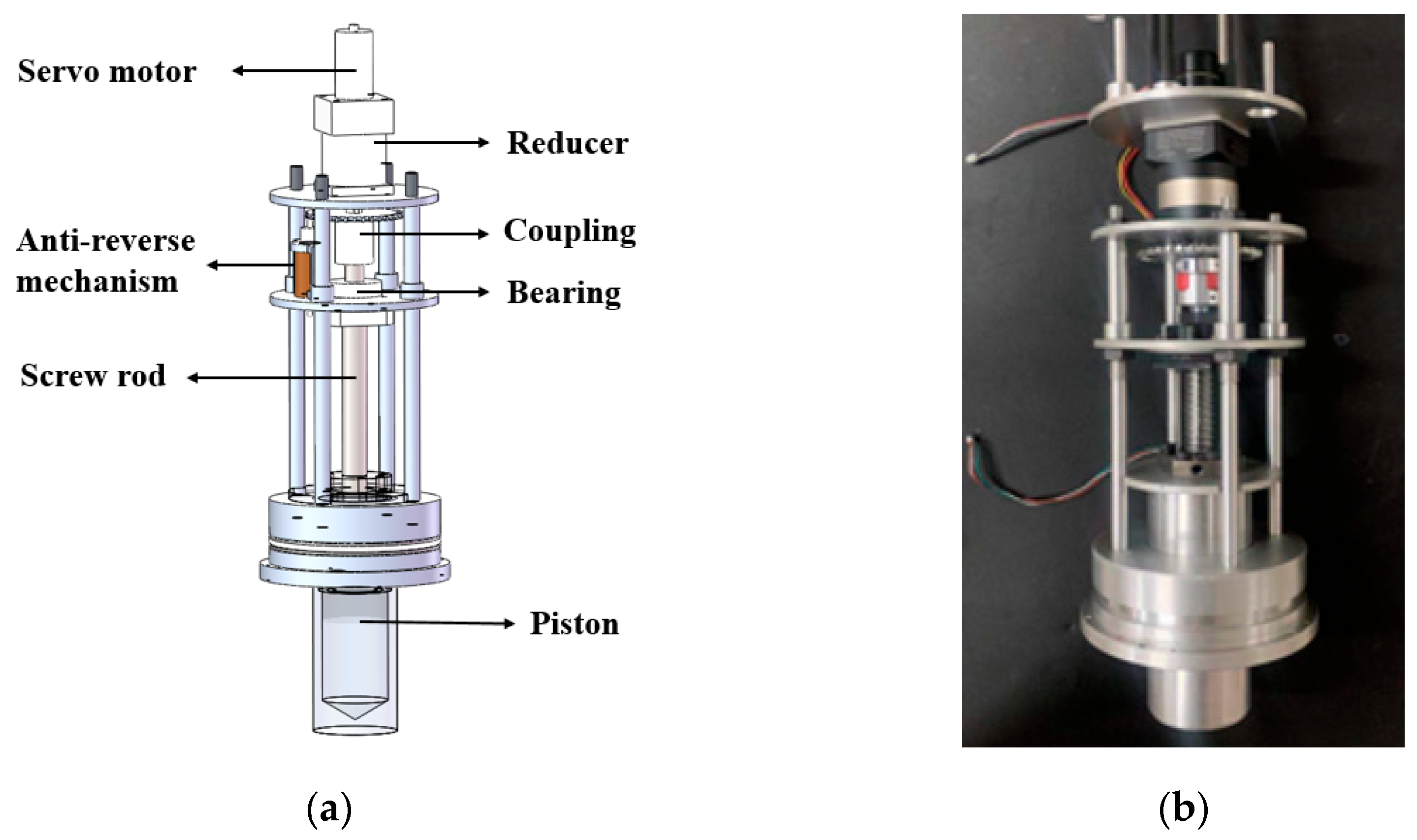
2.1. Structure of Miniaturized Underwater Profiler
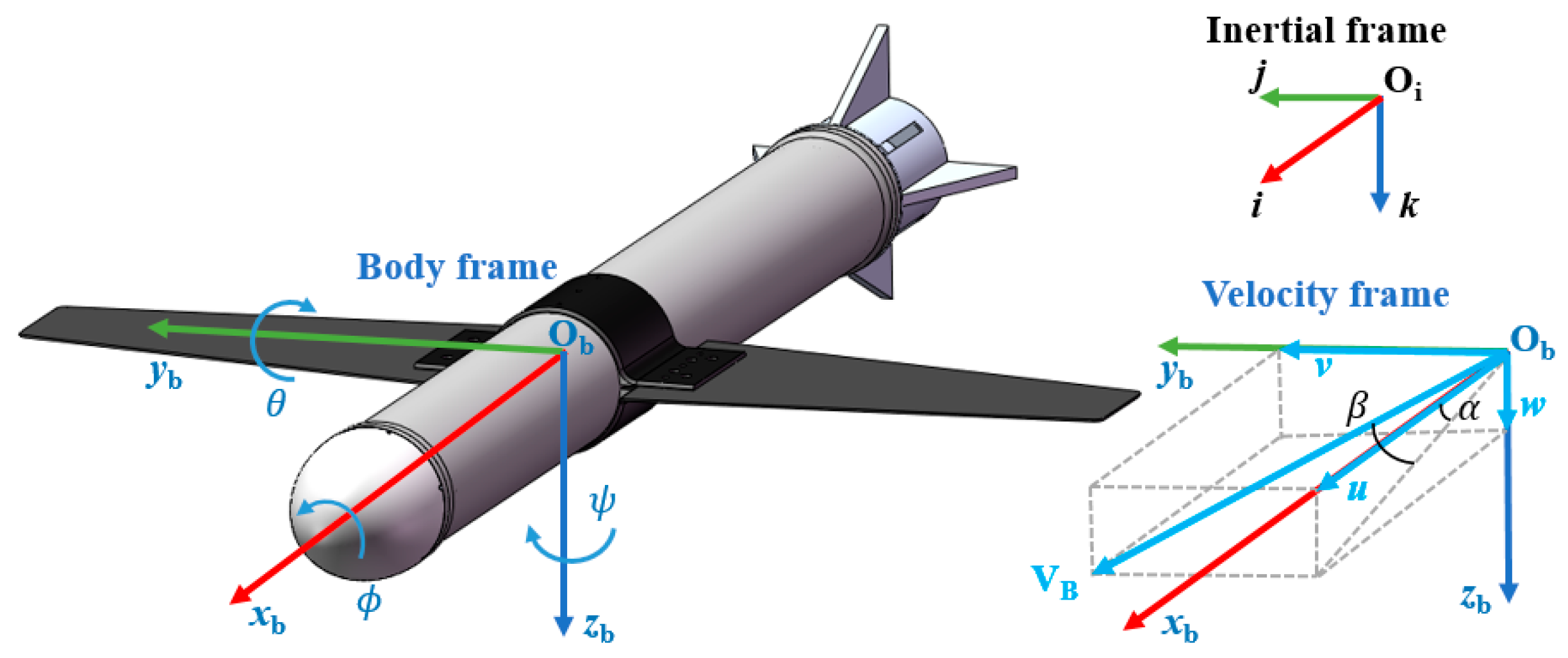
2.2. Kinematic and Dynamic Modeling of the Miniaturized Underwater Profiler
3. Dead Reckoning Algorithm of the Miniaturized Underwater Profiler
3.1. State Equation and Observation Equation of the Miniaturized Underwater Profiler
3.2. Extended Kalman Filter, Unscented Kalman Filter, and Cubature Kalman Filter
3.2.1. Extended Kalman Filter
- Filter initialization
- 2.
- Time update
- 3.
- Measurement update
3.2.2. Unscented Kalman Filter
- Filter initialization
- 2.
- Time update
- 3.
- Measurement update
3.2.3. Cubature Kalman Filter
- Filter initialization
- 2.
- Time update
- 3.
- Measurement update
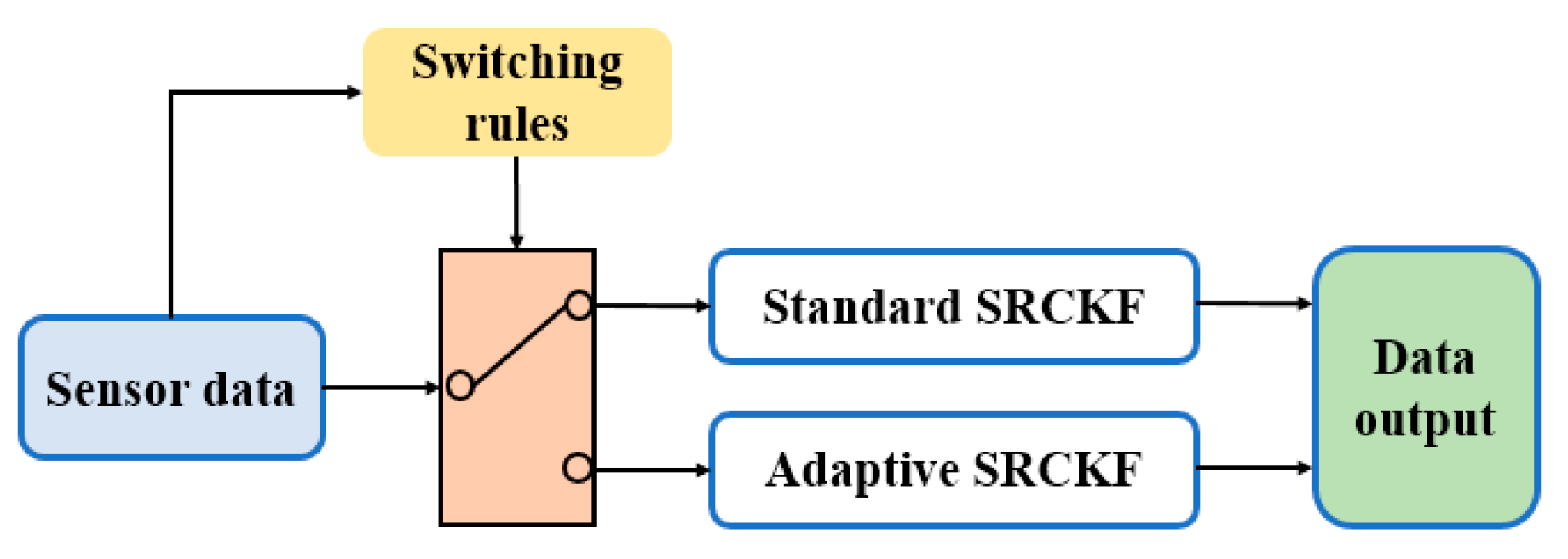
3.3. Dual-Mode Square Root Cubature Kalman Filter
3.3.1. Square Root Cubature Kalman Filter
- Filter initialization
- 2.
- Time update
- 3.
- Measurement update
3.3.2. Adaptive Square Root Cubature Kalman Filter
3.3.3. Switching Rules
| Algorithm 1. dual-mode square root cubature Kalman filter |
| Input: , , , , Output: , |
| 1: Setting number of cycles m 2: Filter initialization 3: , , 4: while k ≤ m do 5: Time update 6: , 7: 8: , 9: 10: Measurement update 11: , 12: 13: , 14: , , 15: 16: 17: Switching 18: , 19: , 20: if then standard SRCKF 21: 22: else adaptive SRCKF 23: 24: 25: 26: end if 27: 28: 29: k ← k + 1 30: end while |
4. Dead Reckoning for the Miniaturized Underwater Profiler
4.1. Hardware Information
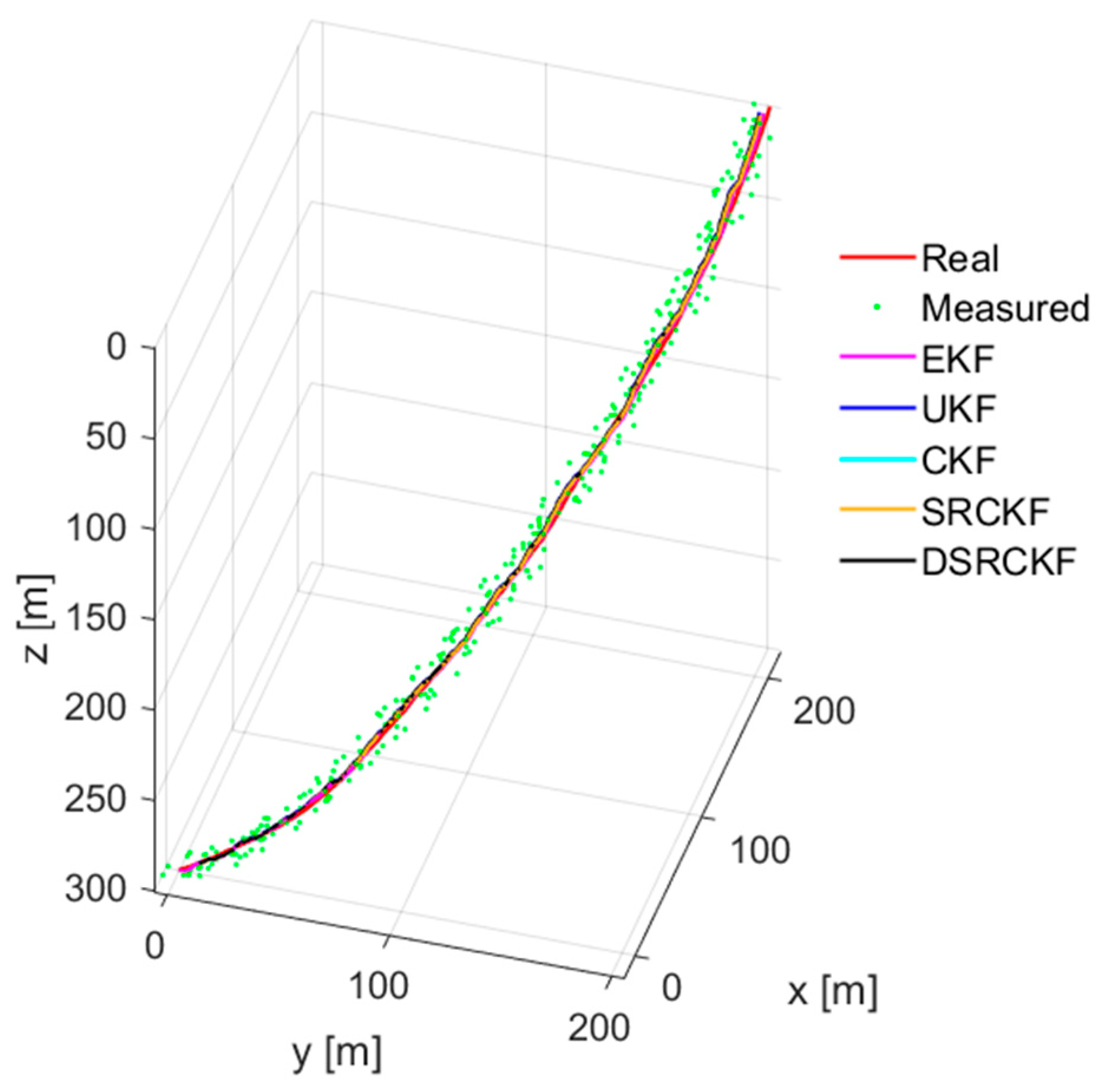
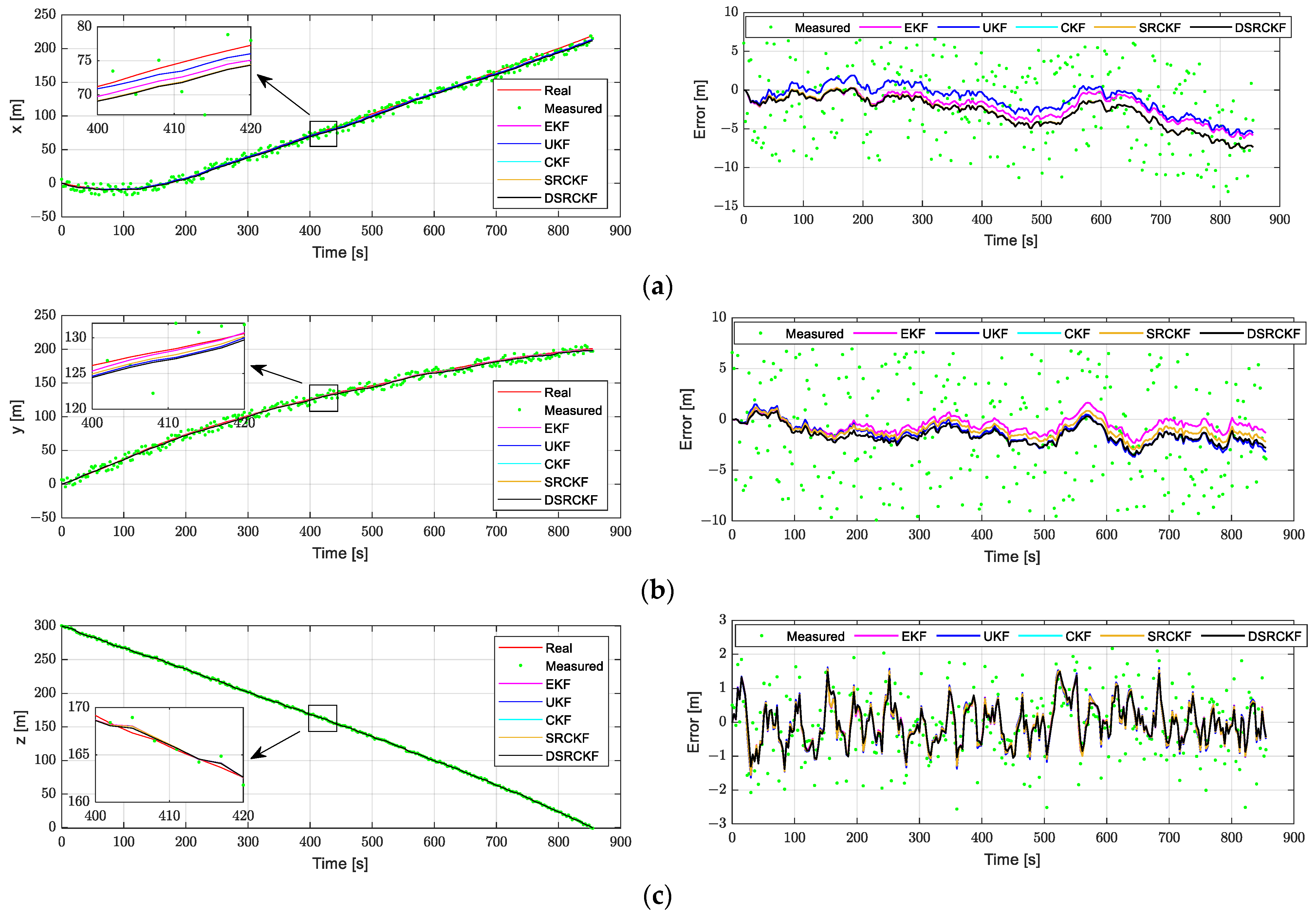
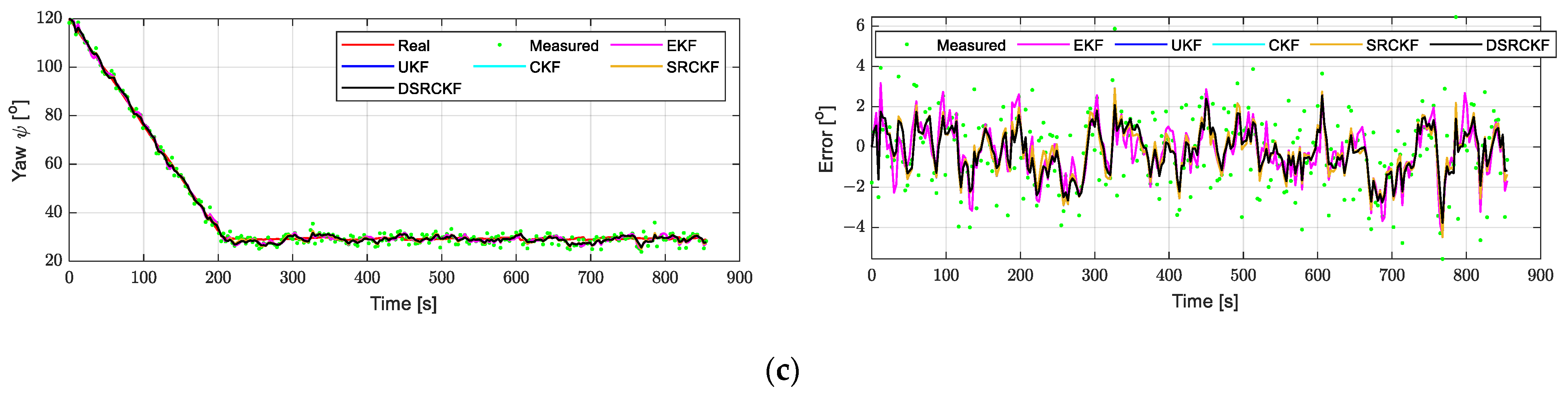
4.2. Simulations
4.2.1. Motion in Fixed Pitch Angle
4.2.2. Motion in Different Situations
4.3. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, M.; Yang, C. Ocean observation technologies: A review. Chin. J. Mech. Eng. 2020, 33, 33–50. [Google Scholar] [CrossRef]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. Slocum: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Asakawa, K.; Nakamura, M.; Kobayashi, T.; Watanabe, Y.; Hyakudome, T.; Ito, Y.; Kojima, J. Design concept of Tsukuyomi—Underwater glider prototype for virtual mooring. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Huang, Y.-W.; Ueda, K.; Itoh, K.; Sasaki, Y.; Debenest, P.; Fukushima, E.F.; Hirose, S. Development of tether mooring type underwater robots: Anchor diver I and II. Indian J. Mar. Sci. 2011, 40, 181–190. [Google Scholar]
- Rainville, L.; Pinkel, R. Wirewalker: An autonomous wave-powered vertical profiler. J. Atmos. Ocean. Technol. 2001, 18, 1048–1051. [Google Scholar] [CrossRef]
- Ten Doeschate, A.; Sutherland, G.; Esters, L.; Wain, D.; Walesby, K.; Ward, B. ASIP: Profiling the upper ocean. Oceanography 2017, 30, 33–35. [Google Scholar] [CrossRef]
- Toole, J.M.; Krishfield, R.A.; Timmermans, M.-L.; Proshutinsky, A. The ice-tethered profiler: Argo of the arctic. Oceanography 2011, 24, 126–135. [Google Scholar] [CrossRef]
- Andre, X.; Reste, S.L.; Rolin, J.-F. Arvor-c: A coastal autonomous profiling float. Sea Technol. 2010, 51, 10–13. [Google Scholar]
- Zhou, P.; Yang, C.; Wu, S.; Zhu, Y. Designated area persistent monitoring strategies for hybrid underwater profilers. IEEE J. Ocean. Eng. 2020, 45, 1322–1336. [Google Scholar] [CrossRef]
- Yang, C.; Wu, D.; Zhou, P.; Ma, S.; Zhou, R.; Zhang, X.; Zhang, Y.; Xia, Q.; Wu, Z. Research on ocean-current-prediction-based virtual mooring strategy for the portable underwater profilers. Appl. Ocean Res. 2024, 142, 103810. [Google Scholar] [CrossRef]
- Kemp, B.; Janssen, A.J.M.W.; van der Kamp, B. Body position can be monitored in 3D using miniature accelerometers and earth-magnetic field sensors. Electroencephalogr. Clin. Neurophysiol. 1998, 109, 484–488. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Yu, T.; Wu, C.; Zhou, C.; Lu, D.; Zeng, Q. A low-cost and high-precision underwater integrated navigation system. J. Mar. Sci. Eng. 2024, 12, 200. [Google Scholar] [CrossRef]
- Xu, B.; Hu, J.; Guo, Y. An acoustic ranging measurement aided SINS/DVL integrated navigation algorithm based on multivehicle cooperative correction. IEEE Trans. Instrum. Meas. 2022, 71, 8504615. [Google Scholar] [CrossRef]
- Fukuda, G.; Kubo, N. Application of initial bias estimation method for inertial navigation system (INS)/Doppler velocity log (DVL) and INS/DVL/gyrocompass using micro-electro-mechanical system sensors. Sensors 2022, 22, 5334. [Google Scholar] [CrossRef] [PubMed]
- Ghanipoor, F.; Alasty, A.; Salarieh, H.; Hashemi, M.; Shahbazi, M. Model identification of a marine robot in presence of IMU-DVL misalignment using TUKF. Ocean Eng. 2020, 206, 107344. [Google Scholar] [CrossRef]
- Karmozdi, A.; Hashemi, M.; Salarieh, H. Design and practical implementation of kinematic constraints in inertial navigation system-Doppler velocity log (IND-DVL)-based navigation. Navigation 2018, 65, 629–642. [Google Scholar] [CrossRef]
- Tal, A.; Klein, I.; Katz, R. Inertial navigation system/Doppler velocity log (INS/DVL) fusion with partial DVL measurements. Sensors 2017, 17, 415. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Zhang, Y.; Wang, J. A strapdown interial navigation system/beidou/doppler velocity log integrated navigation algorithm based on a cubature Kalman filter. Sensors 2014, 14, 1511–1527. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Chen, X.; Zhou, Z.; Xu, Y.; Lv, C. Study of the algorithm of backtracking decoupling and adaptive extended Kalman filter based on the quaternion expanded to the state variable for underwater glider navigation. Sensors 2014, 14, 23041–23066. [Google Scholar] [CrossRef] [PubMed]
- Allotta, B.; Pugi, L.; Bartolini, F.; Ridolfi, A.; Costanzi, R.; Monni, N.; Gelli, J. Preliminary design and fast prototyping of an autonomous underwater vehicle propulsion system. Proc. Inst. Mech. Eng. M J. Eng. 2014, 229, 248–272. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Costanzi, R.; Fanelli, F.; Fenucci, D.; Meli, E.; Ridolfi, A. A new AUV navigation system exploiting unscented Kalman filter. Ocean Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Garcia, R.V.; Pardal, P.C.P.M.; Kuga, H.K.; Zanardi, M.C. Nonlinear filtering for sequential spacecraft attitude estimation with real data: Cubature Kalman filter, unscented Kalman filter and extended Kalman filter. Adv. Space Res. 2019, 63, 1038–1050. [Google Scholar] [CrossRef]
- Davari, N.; Gholami, A. An asynchronous adaptive direct Kalman filter algorithm to improve underwater navigation system performance. IEEE Sens. J. 2017, 17, 1061–1068. [Google Scholar] [CrossRef]
- Emami, M.; Taban, M.R. A customized h-infinity algorithm for underwater navigation system: With experimental evaluation. Ocean Eng. 2017, 130, 611–619. [Google Scholar] [CrossRef]
- Huang, H.; Chen, X.; Zhou, Z.; Lv, C. Attitude determination for underwater gliders using unscented Kalman filter based on smooth variable algorithm. J. Coast. Res. 2015, 73, 698–704. [Google Scholar] [CrossRef]
- Huang, H.; Chen, X.; Zhang, B.; Wang, J. High accuracy navigation information estimation for inertial system using the multi-model EKF fusing adams explicit formula applied to underwater gliders. ISA Trans. 2017, 66, 414–424. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, B.; Huang, X.; Yang, T.; Liu, X. Multi-sensor, adjustable-period integrated navigation method based on multi-stage signal trigger for underwater vehicles. J. Navig. 2017, 71, 208–220. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Huang, H.; Shi, R.; Zhou, J.; Yang, Y.; Song, R.; Chen, J.; Wu, G.; Zhang, J. Attitude determination method integrating square-root cubature Kalman filter with expectation-maximization for inertial navigation system applied to underwater glider. Rev. Sci. Instrum. 2019, 90, 095001. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Wang, S.; Zhang, Y.; Song, S.; Wang, C.; Tan, S.; Zhao, W.; Wang, G.; Sun, W.; Yang, F.; et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Jin, Y.; Liu, C.; Zeng, Z.; Lian, L. Nezha-f: Design and analysis of a foldable and self-deployable HAUV. IEEE Robot. Autom. Lett. 2023, 8, 2309–2316. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Miniaturized Underwater Profiler 1 | ZJU-HUP 2 |
|---|---|---|
| Mass | 11.25 kg | 82 kg |
| Hull dimensions | Ø0.12 m × 1.2 m | Ø0.2377 m × 2.31 m |
| Buoyancy adjustment | 0.3 L | 1.8 L |
| Maximum dive depth | 300 m | 1200 m |
| Designated area persistent monitoring ability | <500 m | 384 m |
| Buoyancy adjustment mode | Piston | Oil bladder |
| Parameters | Accelerometer | Gyroscope | Magnetometer |
|---|---|---|---|
| Measurement range | 8 g | 300°/s | 1.3 Gs |
| Bias stability | 0.003 g | 0.2°/s | 0.01 Gs |
| Nonlinearity | 0.2% | 0.2% | 0.4% |
| Error Parameters | Value |
|---|---|
| Depthometer | 1 m |
| Attitude angle | 2° |
| Angular velocity | 0.2°/s |
| Parameters | Values |
|---|---|
| Pitch angle (°) | 40, 50, 60 |
| Yaw angle (°) | 90, 120, 150 |
| Axial line velocity (m/s) | 0.3, 0.4, 0.5, 0.6 |
| Initial depth (m) | 300 |
| Desired yaw angle (°) | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Xia, Q.; Yang, C.; Song, R.; Wu, D.; Zhang, X.; Zhou, R.; Ma, S. Dual-Mode Square Root Cubature Kalman Filter for Miniaturized Underwater Profiler Dead Reckoning. J. Mar. Sci. Eng. 2024, 12, 1146. https://doi.org/10.3390/jmse12071146
Zhang Y, Xia Q, Yang C, Song R, Wu D, Zhang X, Zhou R, Ma S. Dual-Mode Square Root Cubature Kalman Filter for Miniaturized Underwater Profiler Dead Reckoning. Journal of Marine Science and Engineering. 2024; 12(7):1146. https://doi.org/10.3390/jmse12071146
Chicago/Turabian StyleZhang, Yang, Qingchao Xia, Canjun Yang, Ruiyin Song, Dingze Wu, Xin Zhang, Rui Zhou, and Shuyang Ma. 2024. "Dual-Mode Square Root Cubature Kalman Filter for Miniaturized Underwater Profiler Dead Reckoning" Journal of Marine Science and Engineering 12, no. 7: 1146. https://doi.org/10.3390/jmse12071146