
Construction of a Real-Time Forecast Model with Deep Learning Techniques for Coastal Engineering and Processes: Nested in a Basin Scale Suite of Models

Abstract
1. Introduction
2. Methods
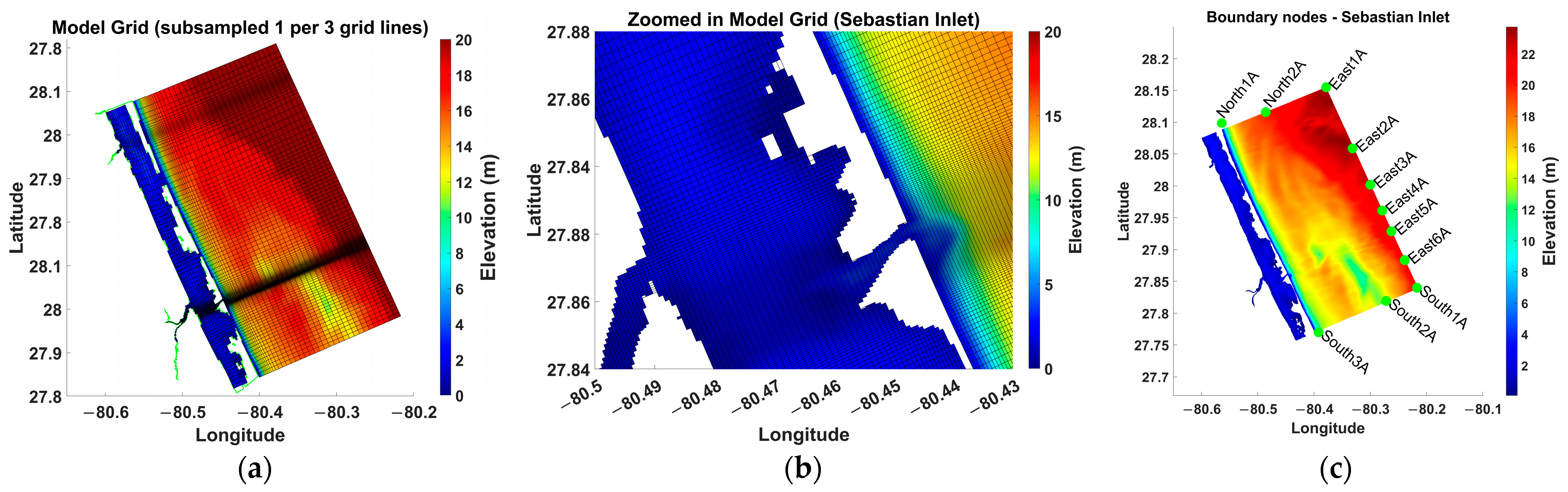
2.1. Model Grid
2.2. Model Setup
3. Machine Learning Techniques
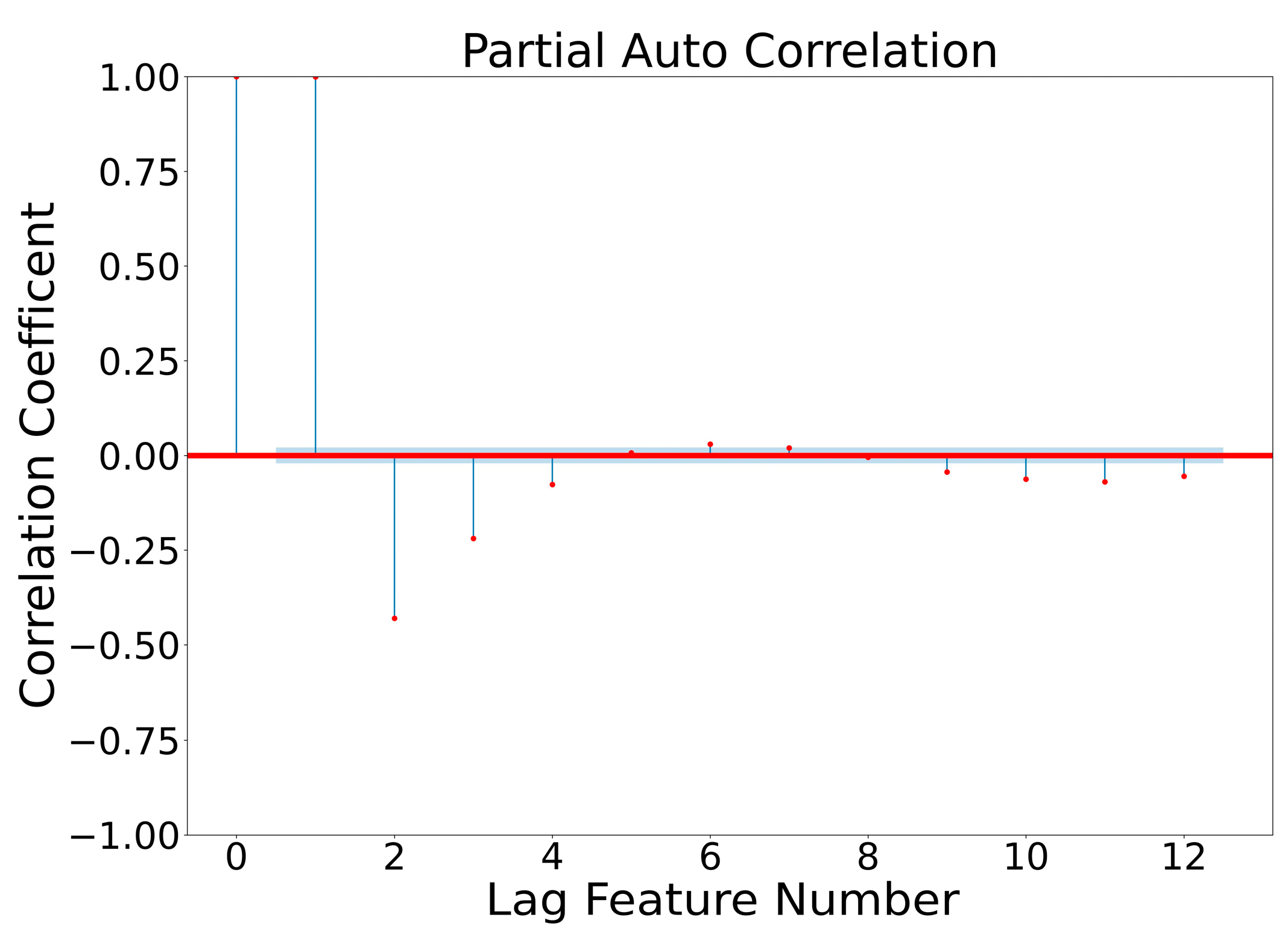
3.1. Lag Plot
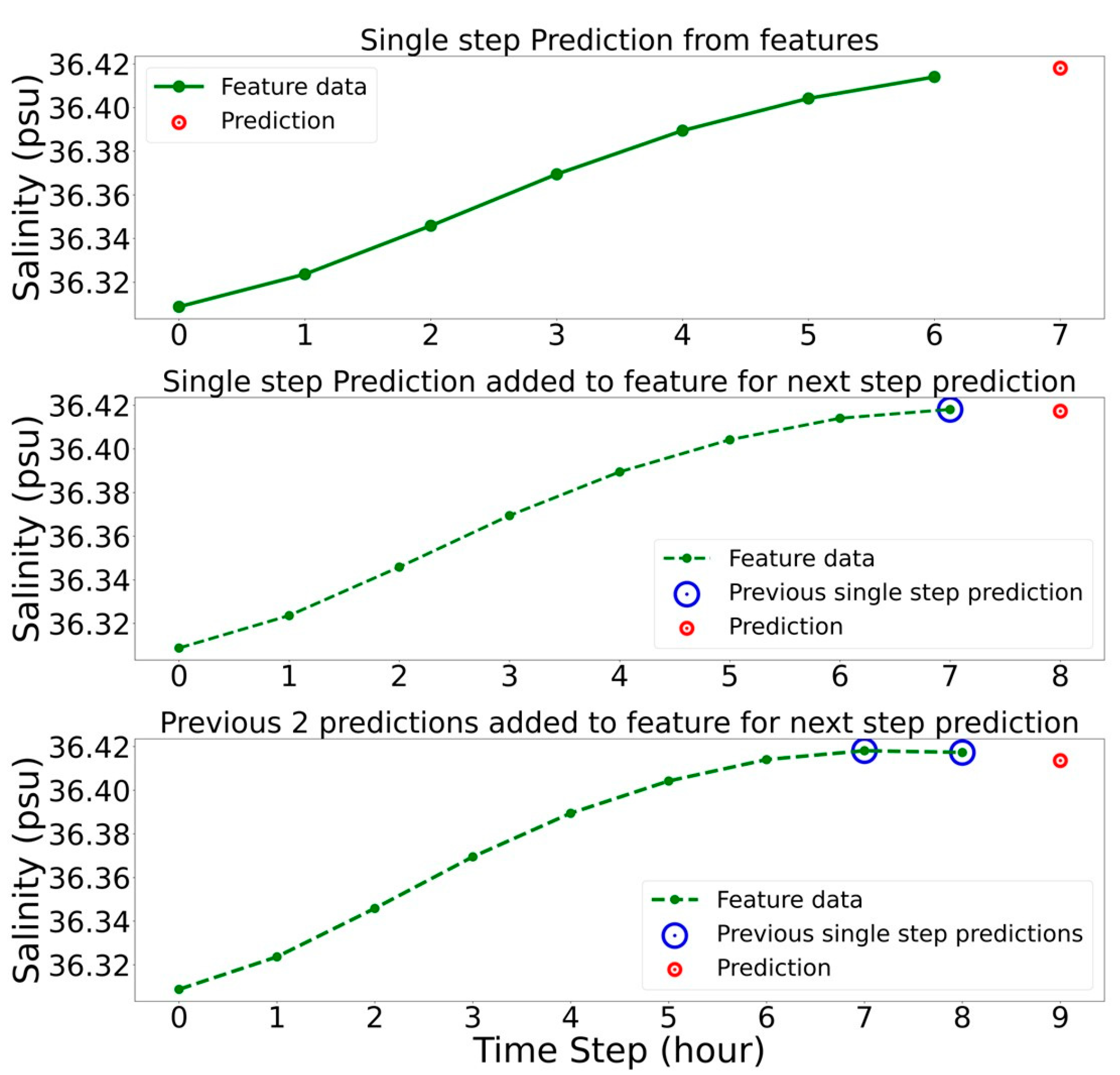
3.2. Multi-Step Predictions
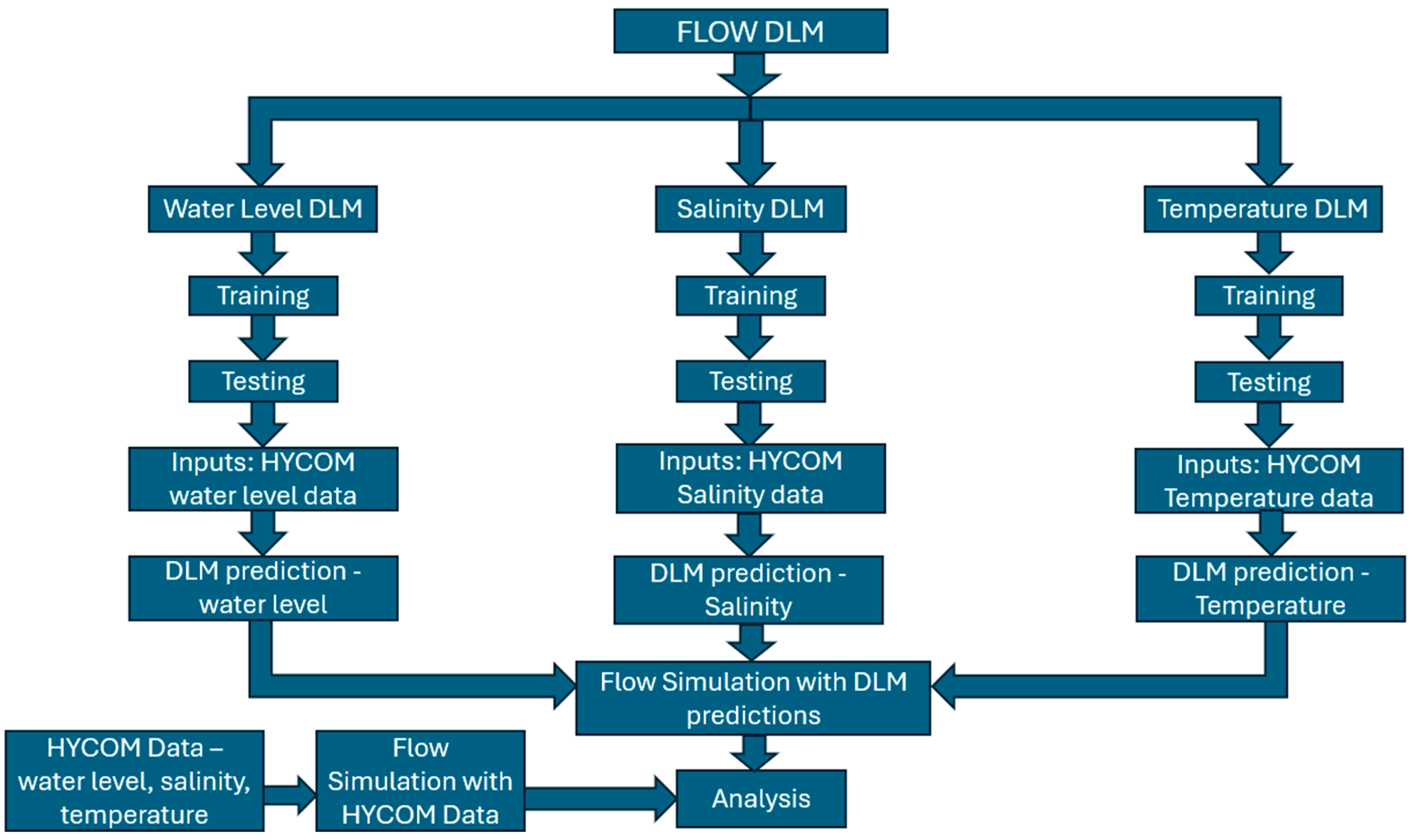
3.3. Workflow
3.4. Train–Test Data
3.5. DLM Inputs and Predictions
3.6. Flow Simulations
4. Results
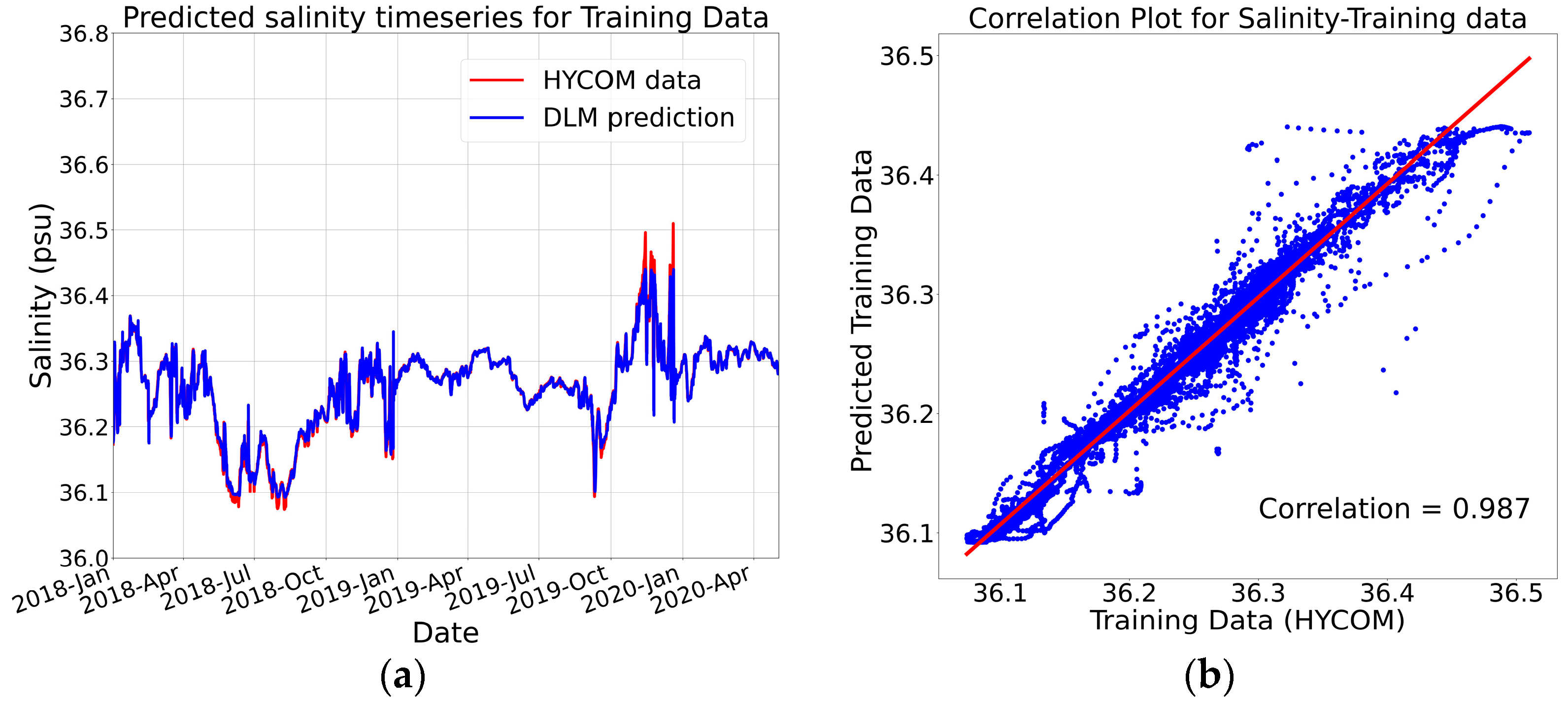
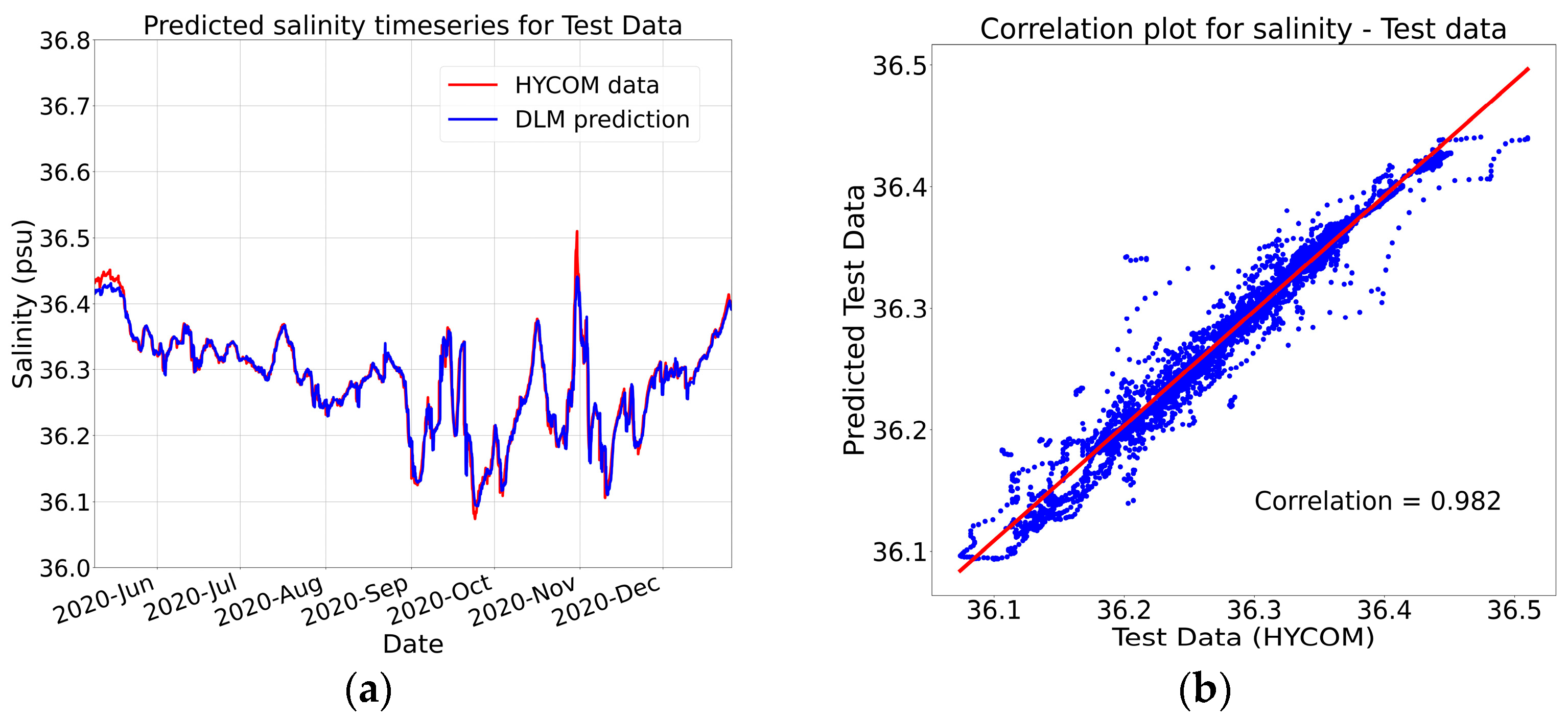
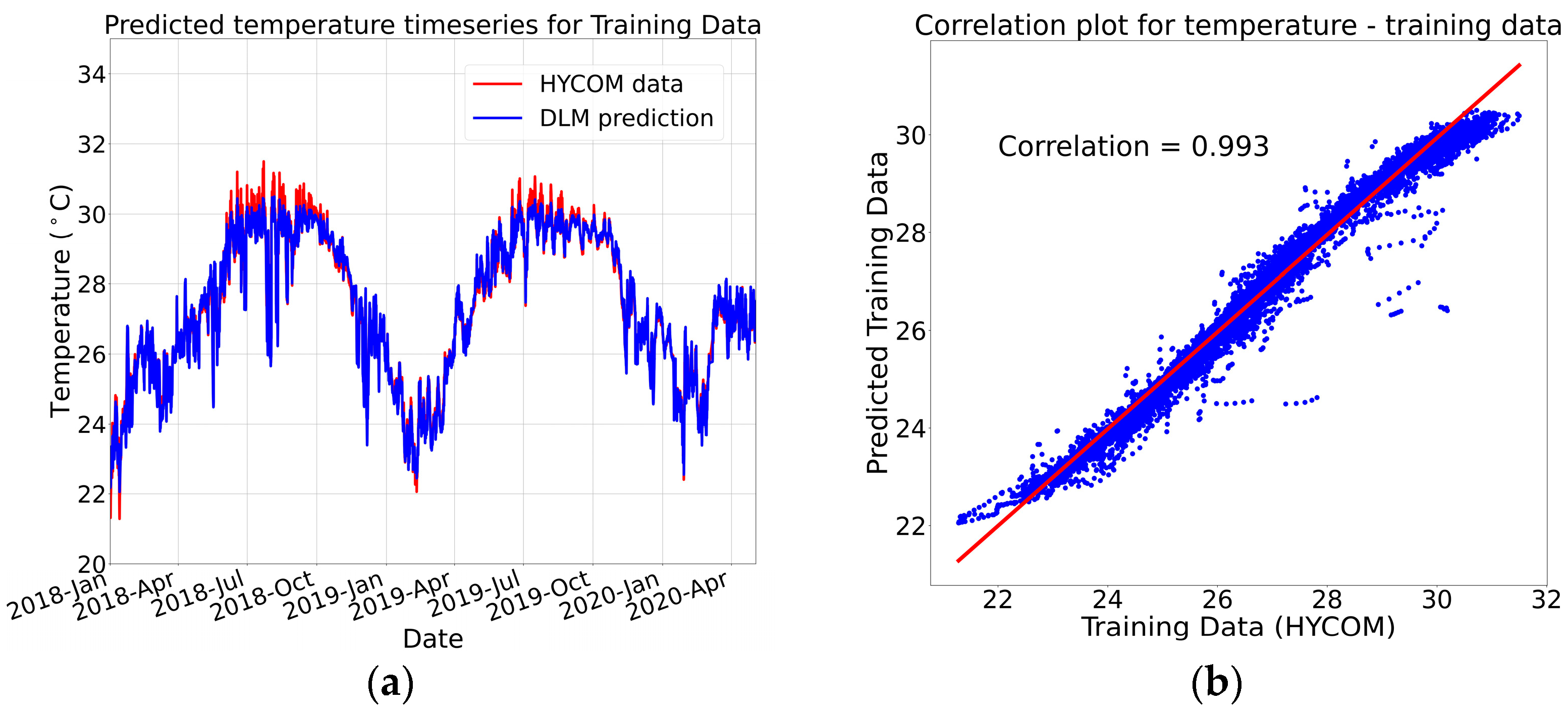
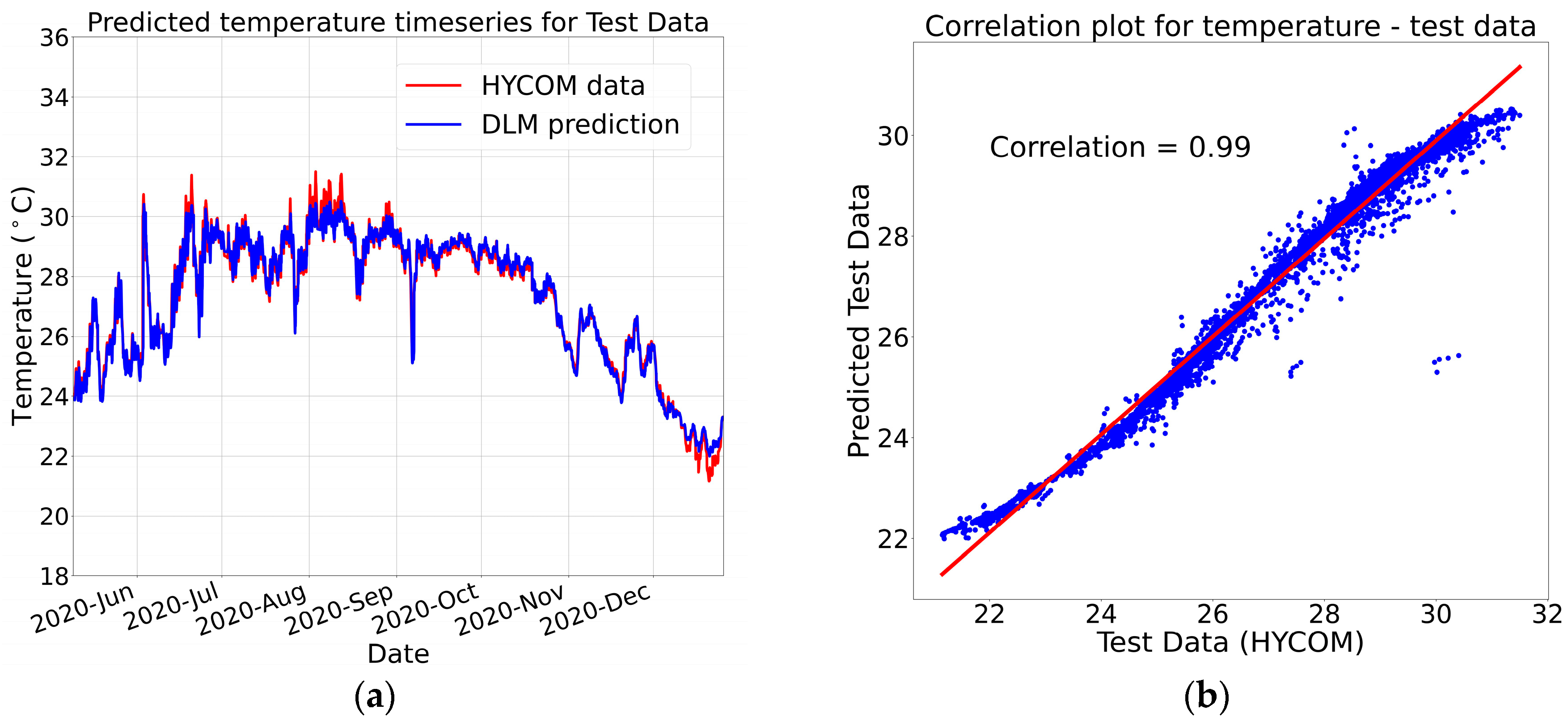
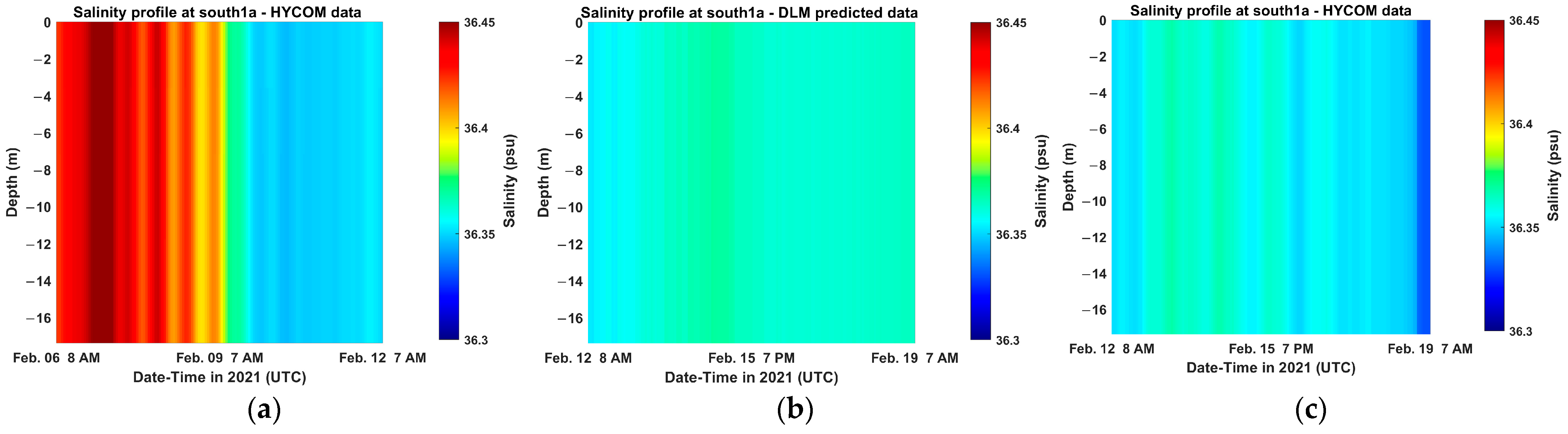
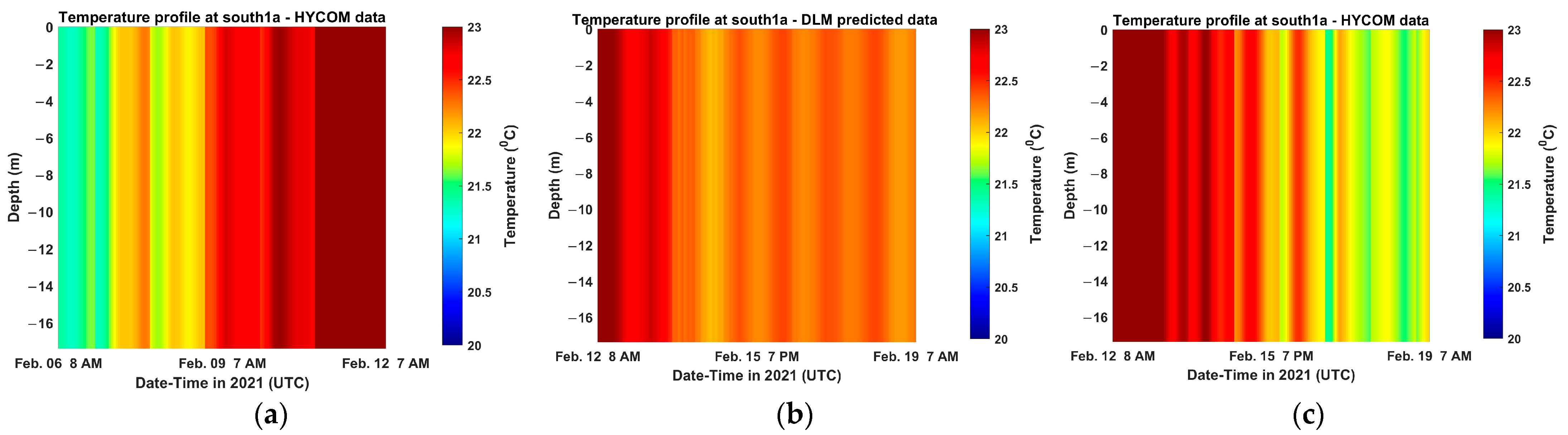
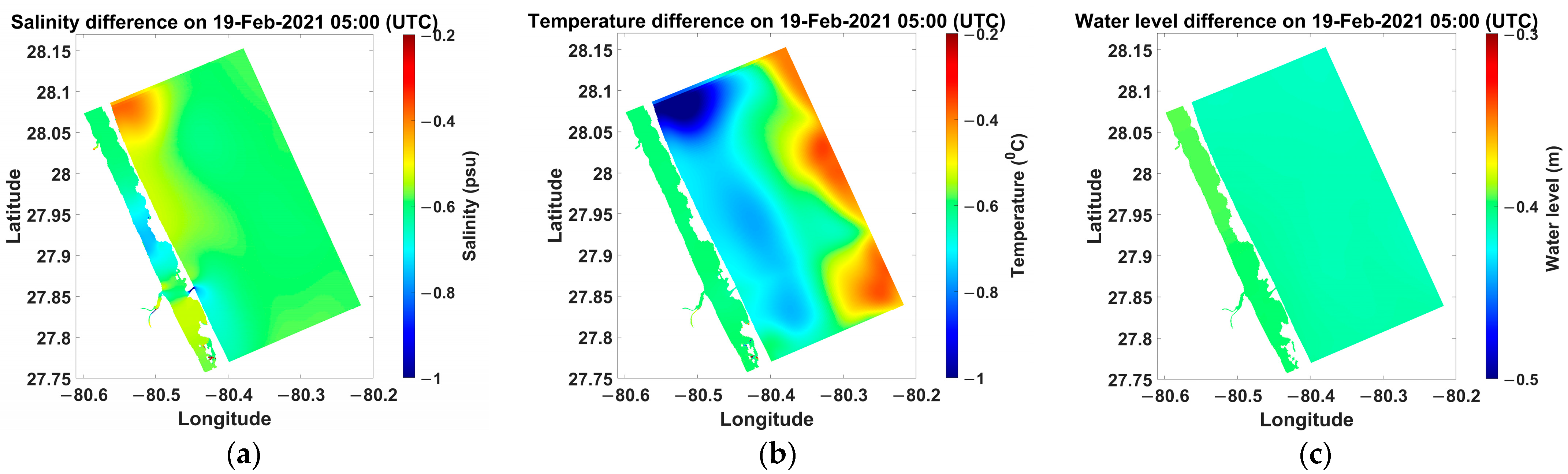
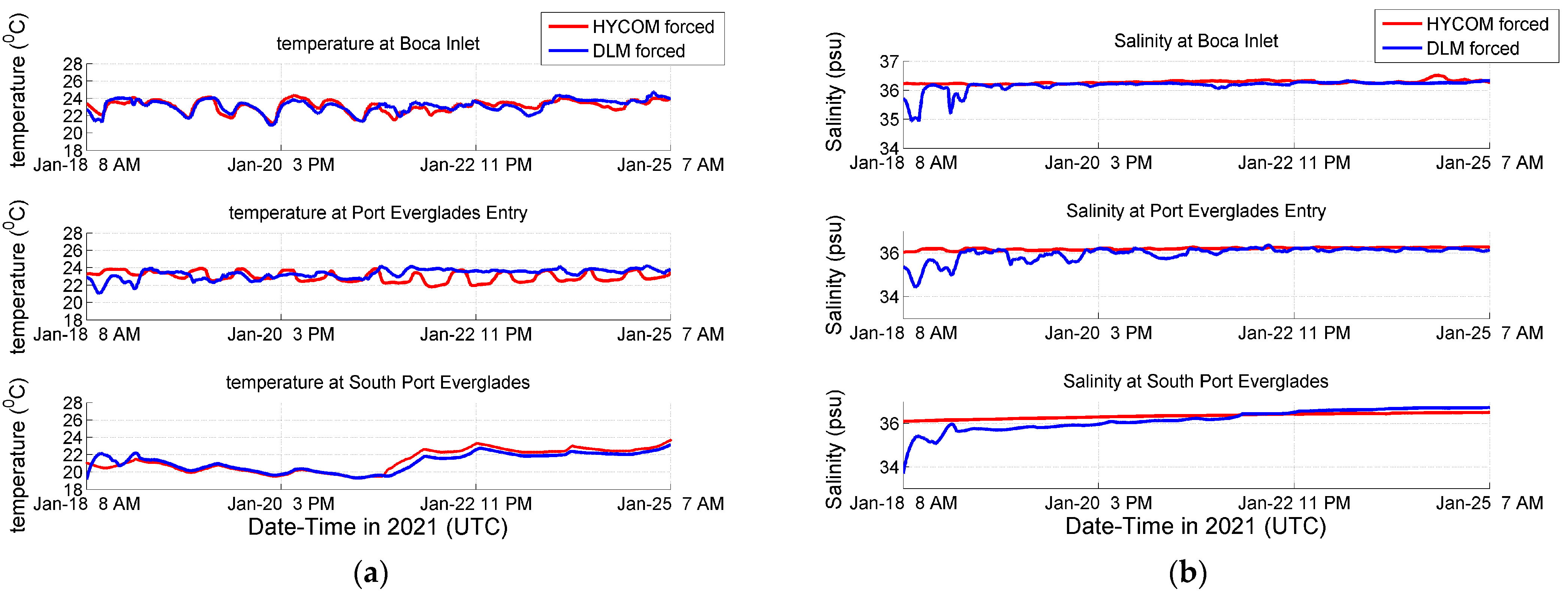
4.1. Salinity and Water Temperature
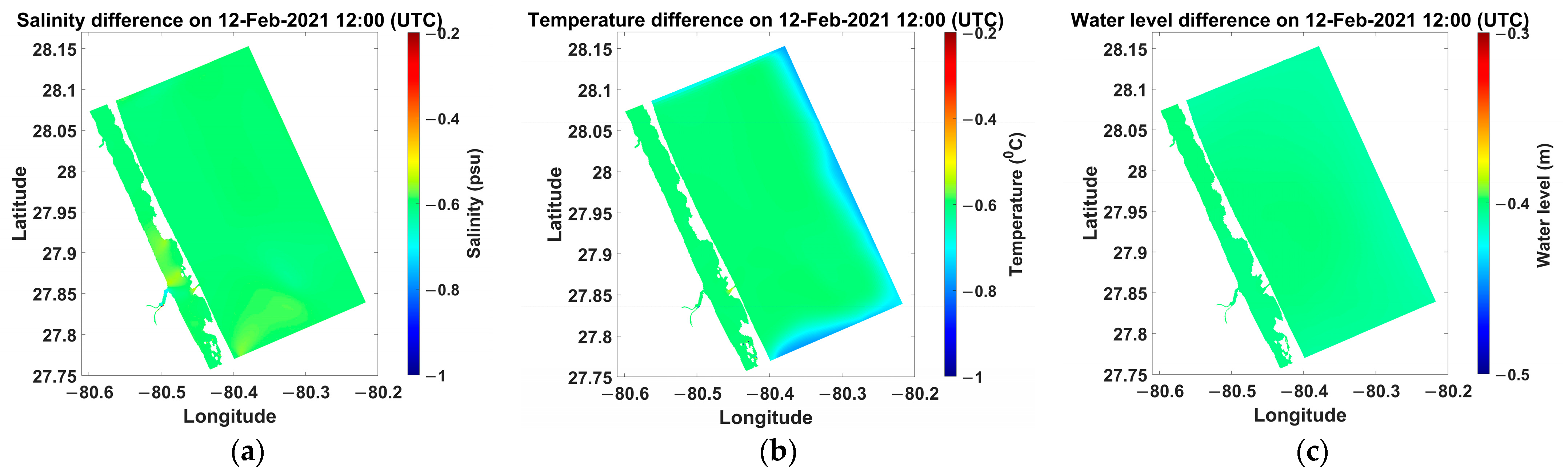
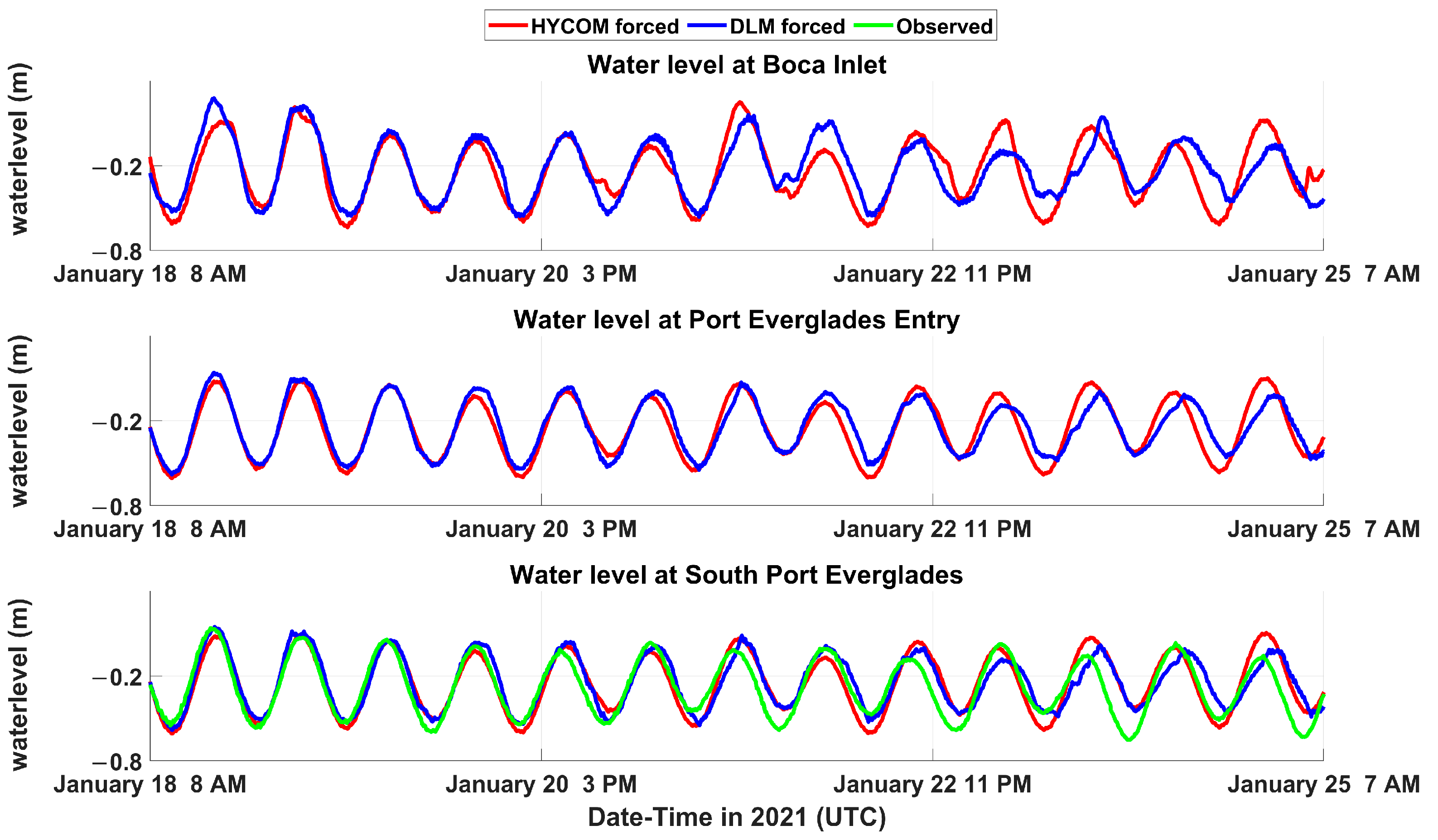
4.2. Water Level
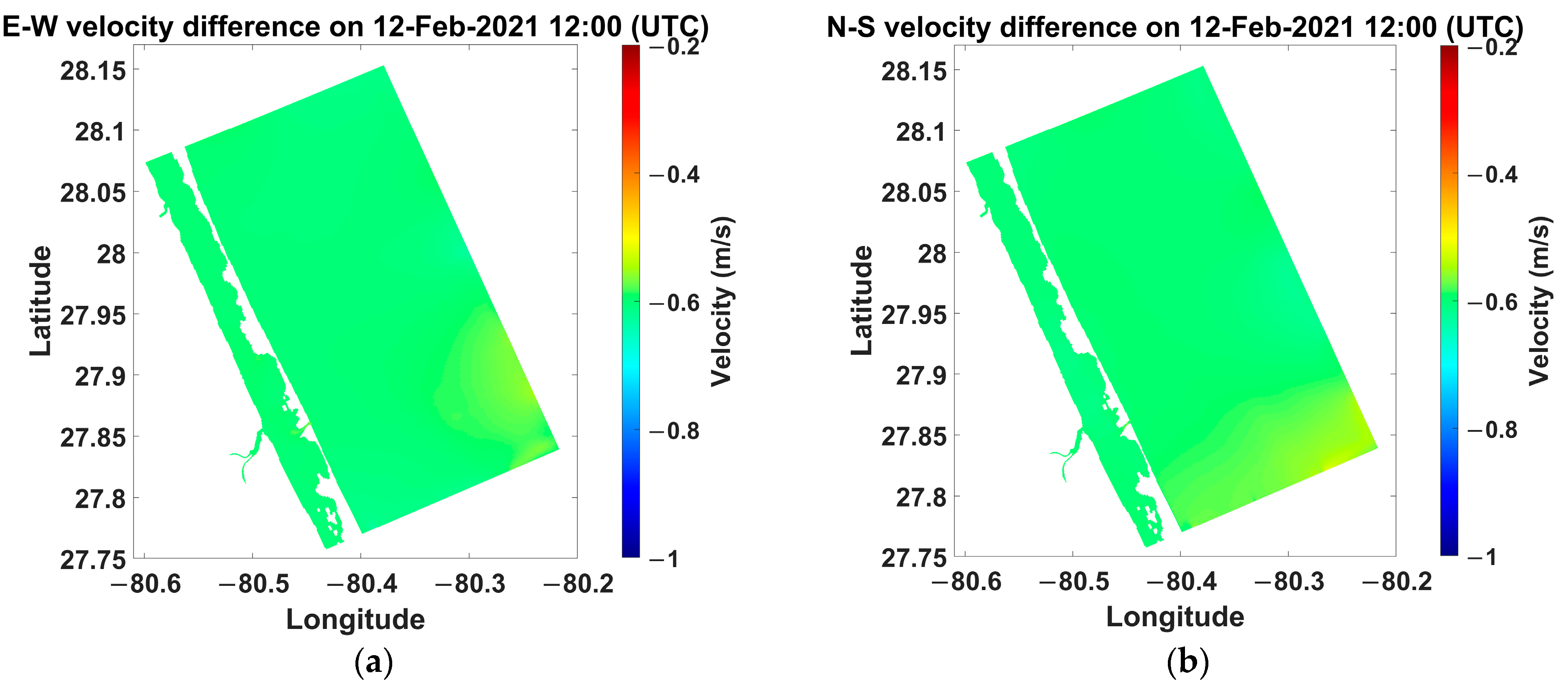
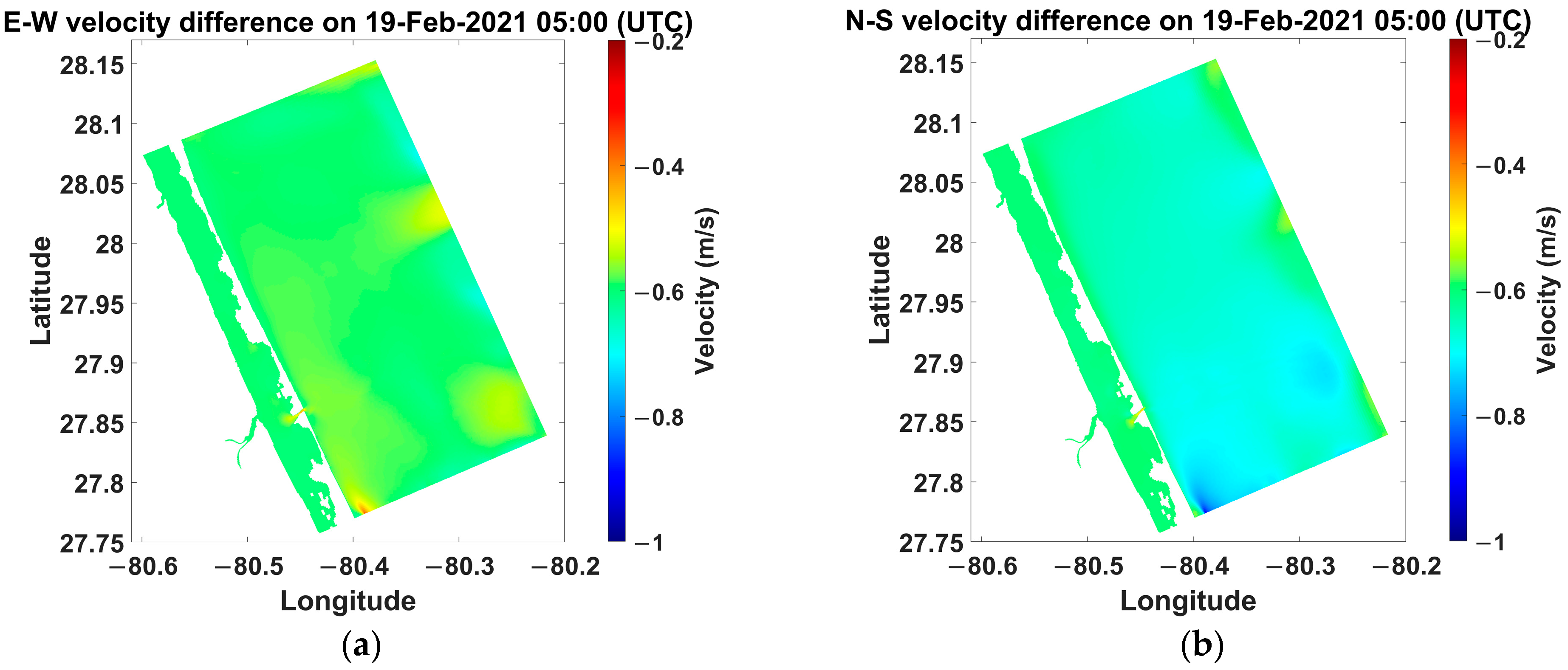
4.3. Currents
4.4. Length of Prediction Range
4.5. Direct Application
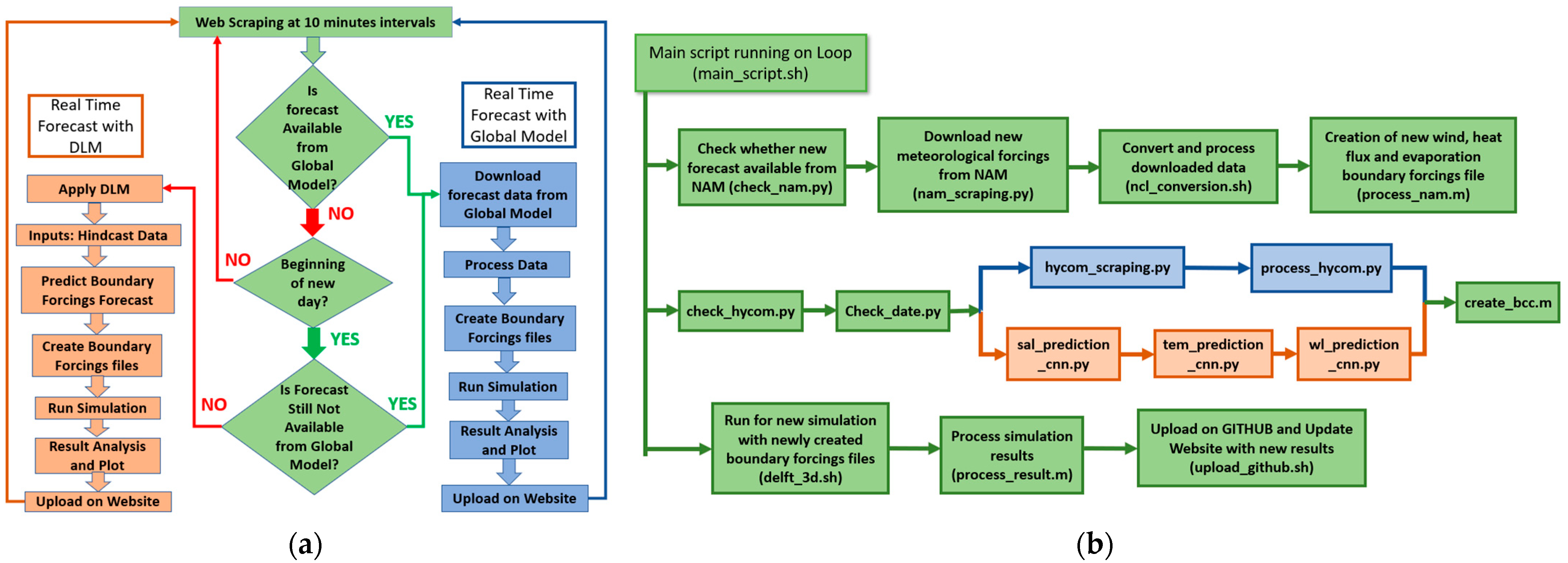
5. Real-Time Forecasts
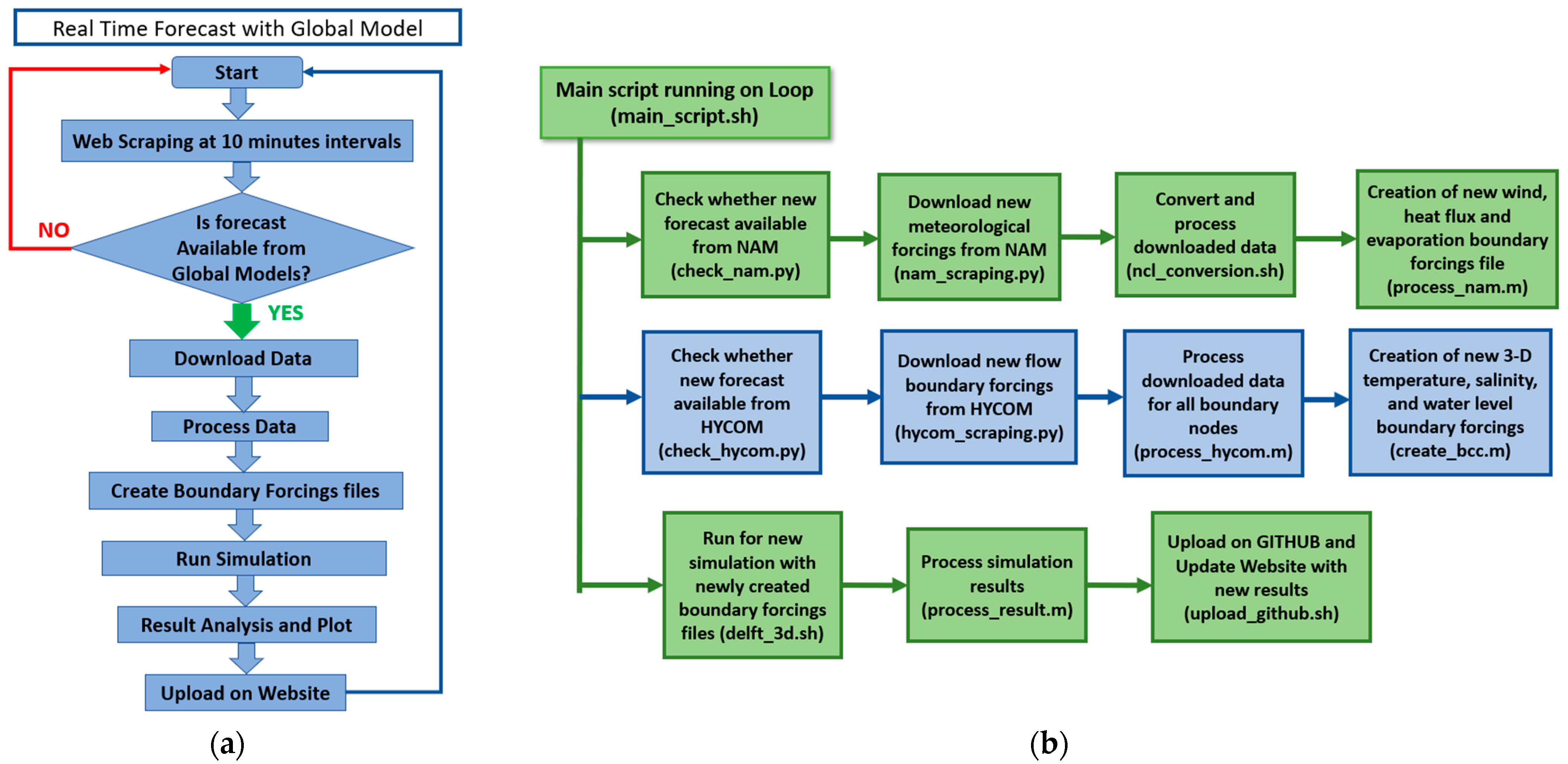
5.1. Real-Time Forecast with Data from Global Models
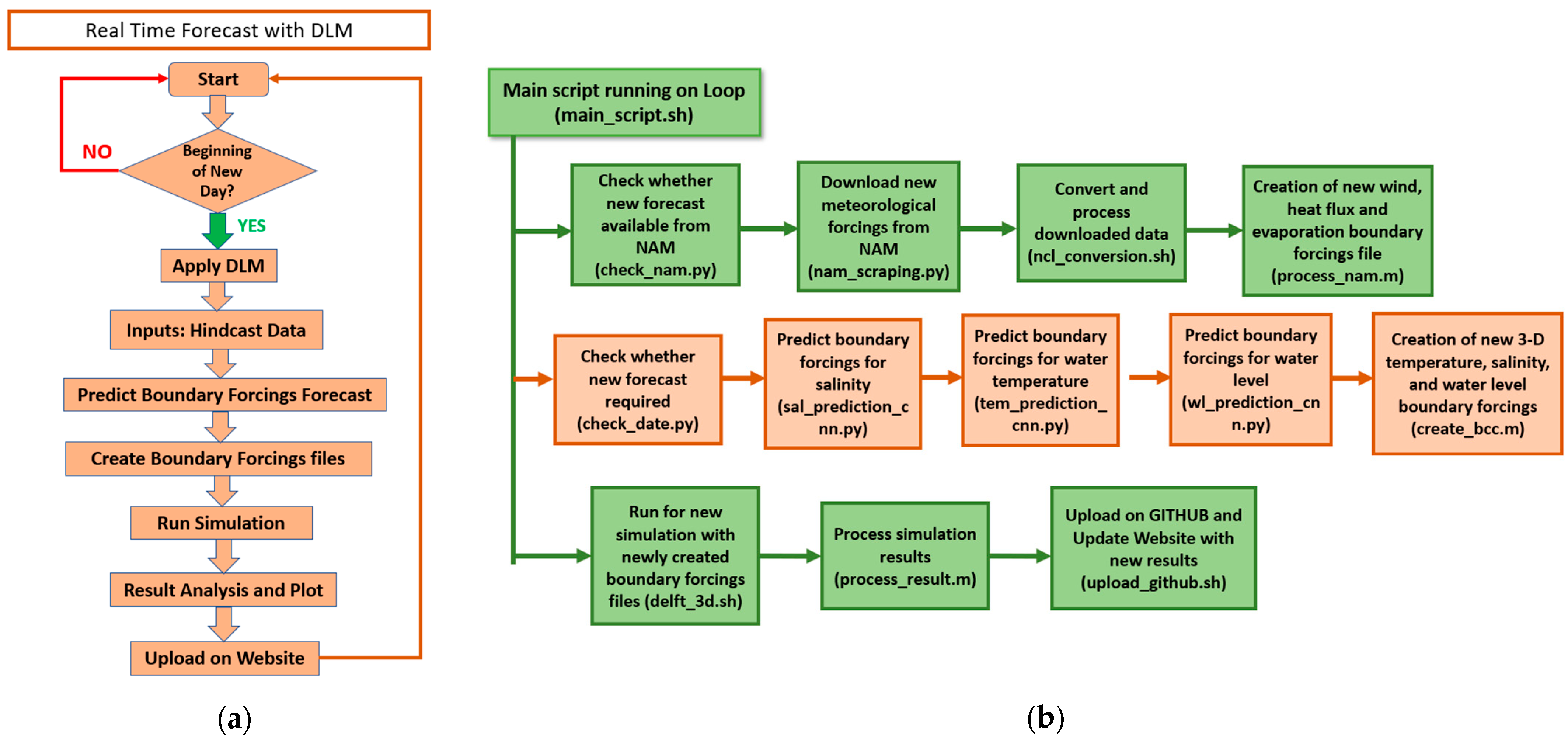
5.2. Real-Time Forecast with DLM
5.3. Real-Time Forecast with a Combination of Global Models and DLM
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Train–Test of Water Level, Salinity and Water Temperature
Appendix B. Direct Application on Port Everglades Model

References
- Ezer, T.; Atkinson, L.P.; Corlett, W.B.; Blanco, J.L. Gulf Stream’s induced sea level rise and variability along the us mid-Atlantic coast. J. Geophys. Res. Ocean 2013, 118, 685–697. [Google Scholar] [CrossRef]
- Katavouta, A.; Thompson, K.R. Downscaling Ocean conditions: Experiments with a quasi-geostrophic model. Ocean Model. 2013, 72, 231–241. [Google Scholar] [CrossRef]
- Katavouta, A.; Thompson, K.R.; Lu, Y.; Loder, J.W. Interaction between the tidal and seasonal variability of the Gulf of Maine and Scotian Shelf region. J. Phys. Oceanogr. 2016, 46, 3279–3298. [Google Scholar] [CrossRef]
- Auclair, F.; Estournel, C.; Marsaleix, P.; Pairaud, I. On coastal ocean embedded modeling. Geophys. Res. Lett. 2006, 33, 14. [Google Scholar] [CrossRef]
- Beckers, J.M.; Brasseur, P.; Nihoul, J. Circulation of the western mediterranean: From global to regional scales. Deep Sea Res. Part II Top. Stud. Oceanogr. 1997, 44, 531–549. [Google Scholar] [CrossRef]
- Cailleau, S.; Fedorenko, V.; Barnier, B.; Blayo, E.; Debreu, L. Comparison of different numerical methods used to handle the open boundary of a regional ocean circulation model of the Bay of Biscay. Ocean Model. 2008, 25, 1–16. [Google Scholar] [CrossRef]
- Penven, P.; Debreu, L.; Marchesiello, P.; McWilliams, J.C. Evaluation and application of the ROMS 1-way embedding procedure to the central California upwelling system. Ocean Model. 2006, 12, 157–187. [Google Scholar] [CrossRef]
- Tomczak, M. Shelf and Coastal Oceanography; University of Maine: Orono, ME, USA, 1998. [Google Scholar]
- Asefa, T.; Kemblowski, M.; McKee, M.; Khalil, A. Multi-time scale stream flow predictions: The support vector machines approach. J. Hydrol. 2006, 318, 7–16. [Google Scholar] [CrossRef]
- Guilford, T.; Meade, J.; Willis, J.; Phillips, R.A.; Boyle, D.; Roberts, S.; Collett, M.; Freeman, R.; Perrins, C.M. Migration and stopover in a small pelagic seabird, the Manx shearwater Puffinus puffinus: Insights from machine learning. Proc. R. Soc. B Biol. Sci. 2009, 276, 1215–1223. [Google Scholar] [CrossRef] [PubMed]
- James, S.C.; Zhang, Y.; O’Donncha, F. A machine learning framework to forecast wave conditions. Coast. Eng. 2018, 137, 1–10. [Google Scholar] [CrossRef]
- Krinitskiy, M.A. Application of machine learning methods to the solar disk state detection by all-sky images over the ocean. Oceanology 2017, 57, 265–269. [Google Scholar] [CrossRef]
- Bolton, T.; Zanna, L. Applications of deep learning to ocean data inference and subgrid parameterization. J. Adv. Model. Earth Syst. 2019, 11, 376–399. [Google Scholar] [CrossRef]
- Habib, M.A.; Zarillo, G.A. Gulf Stream Effects on Sea Level Oscillations: Enhancing Performance of a Coastal and Estuarine Model Nested into Global Model through Modified Boundary Conditions. J. Mar. Sci. Eng. 2024, 12, 775. [Google Scholar] [CrossRef]
- Deltares, D. Simulation of Multi-Dimensional Hydrodynamic Flows and Transport Phenomena, Including Sediments; Version 4.05; Delft3D-Flow User Manual: Delft, The Netherlands, 2022; Available online: https://oss.deltares.nl/web/delft3d/manuals (accessed on 16 February 2023).
- Google Earth Version 9.185.0.0. Sebastian, Florida, USA. Available online: https://earth.google.com/ (accessed on 13 April 2024).
- NOAA National Geophysical Data Center. 1/3 Arc-Second MHW Coastal Digital Elevation Model; NOAA National Centers for Environmental Information: Palm Beach, FL, USA, 2010. Available online: https://www.ncei.noaa.gov/access/metadata/landing-page/bin/iso?id=gov.noaa.ngdc.mgg.dem:427 (accessed on 25 April 2018).
- Metzger, E.J.; Helber, R.W.; Hogan, P.J.; Posey, P.G.; Thoppil, P.G.; Townsend, T.L.; Wallcraft, A.J.; Smedstad, O.M.; Franklin, D.S.; Zamudo-Lopez, L.; et al. Global Ocean Forecast System 3.1 Validation Testing; NRL Report; Naval Research Lab Stennis Detachment Stennis Space Center: Bay St. Louis, MS, USA, 2017; NRL/MR/7320-17-9722; Available online: https://hycom.org (accessed on 24 March 2023).
- Mesinger, F.; DiMego, G.; Kalnay, E.; Mitchell, K.; Shafran, P.C.; Ebisuzaki, W.; Jović, D.; Woollen, J.; Rogers, E.; Berbery, E.H.; et al. North American Regional Reanalysis: A long-term, consistent, high-resolution climate dataset for the North American domain, as a major improvement upon the earlier global reanalysis datasets in both resolution and accuracy. Bull. Am. Meteorol. Soc. 2006, 87, 343–360. [Google Scholar] [CrossRef]
- Habib, M.A.; Zarillo, Z.A. Construction of a Real-Time Forecast Model for Coastal Engineering and Processes Nested in a Basin Scale Model. J. Mar. Sci. Eng. 2023, 11, 1263. [Google Scholar] [CrossRef]
- NOAA North American Mesoscale Forecast System (NAM). Available online: https://registry.opendata.aws/noaa-nam (accessed on 24 March 2023).
- Google Earth, Version 9.185.0.0. Port Everglades, Florida, USA. Available online: https://earth.google.com (accessed on 20 May 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Salinity | Lag 1 | Lag 2 | Lag 3 | Lag 4 | Lag 5 | Lag 6 | Lag 7 | Lag 8 | Lag 9 | Lag 10 | Lag 11 | Lag 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN | NaN |
| 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN | NaN |
| 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN | NaN |
| 36.414 | 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN | NaN |
| 36.408 | 36.414 | 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN | NaN |
| 36.403 | 36.408 | 36.414 | 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 | NaN |
| 36.398 | 36.403 | 36.408 | 36.414 | 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 | 36.309 |
| 36.397 | 36.398 | 36.403 | 36.408 | 36.414 | 36.417 | 36.418 | 36.414 | 36.404 | 36.389 | 36.369 | 36.346 | 36.324 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, M.A.; Zarillo, G.A. Construction of a Real-Time Forecast Model with Deep Learning Techniques for Coastal Engineering and Processes: Nested in a Basin Scale Suite of Models. J. Mar. Sci. Eng. 2024, 12, 1152. https://doi.org/10.3390/jmse12071152
Habib MA, Zarillo GA. Construction of a Real-Time Forecast Model with Deep Learning Techniques for Coastal Engineering and Processes: Nested in a Basin Scale Suite of Models. Journal of Marine Science and Engineering. 2024; 12(7):1152. https://doi.org/10.3390/jmse12071152
Chicago/Turabian StyleHabib, Md Ahsan, and Gary A. Zarillo. 2024. "Construction of a Real-Time Forecast Model with Deep Learning Techniques for Coastal Engineering and Processes: Nested in a Basin Scale Suite of Models" Journal of Marine Science and Engineering 12, no. 7: 1152. https://doi.org/10.3390/jmse12071152
APA StyleHabib, M. A., & Zarillo, G. A. (2024). Construction of a Real-Time Forecast Model with Deep Learning Techniques for Coastal Engineering and Processes: Nested in a Basin Scale Suite of Models. Journal of Marine Science and Engineering, 12(7), 1152. https://doi.org/10.3390/jmse12071152