Abstract
This paper investigates consensus control in heterogeneous and uncertain multiple autonomous underwater vehicle (AUV) systems under implicit reduced visibility conditions. We address challenges such as environmental uncertainties and system nonlinearity by utilizing a unified connectivity approach to model low-visibility interactions and heterogeneous multi-AUV dynamics. Our main contributions include developing a feedback linearization model for heterogeneous multi-AUV systems that accounts for uncertainties, introducing an adaptive consensus controller based on relative positioning that effectively manages implicit visual interaction limitations and validating our strategies through stability analysis and numerical simulations. Our simulations demonstrate approximately a 60% improvement in accuracy compared to previous algorithms, highlighting the practical value of our approach in AUV recovery operations. These advancements provide a robust solution for consensus control in complex underwater environments.
1. Introduction
Autonomous underwater vehicles (AUVs) enhance underwater operations with their intelligence and flexibility [1] and the use of multiple AUVs (multi-AUVs) systems further improves distribution, coordination, and operational complexity [2,3,4]. Critical among their applications is AUV recovery, vital for safety and durability [5,6]. The complexity escalates when it comes to the recovery system of multi-AUVs, rendering the task even more challenging [7,8]. Significantly, pivotal trials utilizing multiple robotic fish systems have, for the first time, showcased the viability and advantages of visual implicit collaborative behavior in underwater scenarios [9]. Progress in underwater vision technology [10,11,12] promises to enable more sophisticated cooperative tasks. Compared to traditional acoustic methods, vision sensors offer considerable benefits in terms of cost, precision, and transmission speed, proving invaluable for multi-AUV recovery research [13,14,15].
Research in the area of recovery control for multi-AUV systems is extensive. References [7,16] have primarily focused on designing coordinated controllers for multi-AUVs considering environmental influences on each individual AUV. However, the idealized assumptions about the communication structure essentially simplify the issue of the trajectory tracking of a single AUV. The interactions among multi-AUV systems are often represented through graph theory, as illustrated in Refs. [8,17,18,19,20,21]. These approaches have been implemented to solve coordinated control issues within complex underwater acoustic communication contexts, addressing issues such as time delays [18,19], energy efficiency [8,17], and external disturbances [20,21]. However, adapting these control methodologies to visual interaction systems presents challenges, requiring a precisely defined ideal communication structure and global information.
In underwater visual interaction technology, simultaneous localization and mapping (SLAM) has gained significant attention [22]. However, due to the challenges in extracting underwater features [23] and achieving robustness and real-time performance [24], visual detection and pose estimation techniques are more suitable for multi-AUV coordinated control. Experiments have been conducted with land-based robots [25] and underwater robots [26], both utilizing solely visual sensors. However, since both studies employed QR codes for identification, this method proved to be inadequate for large-scale coordinated scenarios among agents. Therefore, the exploration of implicit approaches is crucial and more applicable to vision-based contexts.
In practical scenarios, uncertainties are difficult to avoid, and heterogeneity frequently occurs. Various studies have addressed these issues under different conditions [27,28,29,30]. However, the methods are not directly applicable to AUV models due to their high nonlinearity. Regarding heterogeneity, in multi-AUV recovery coordinated control systems, it is essential to consider the heterogeneity of communication [31] and dynamics [32].
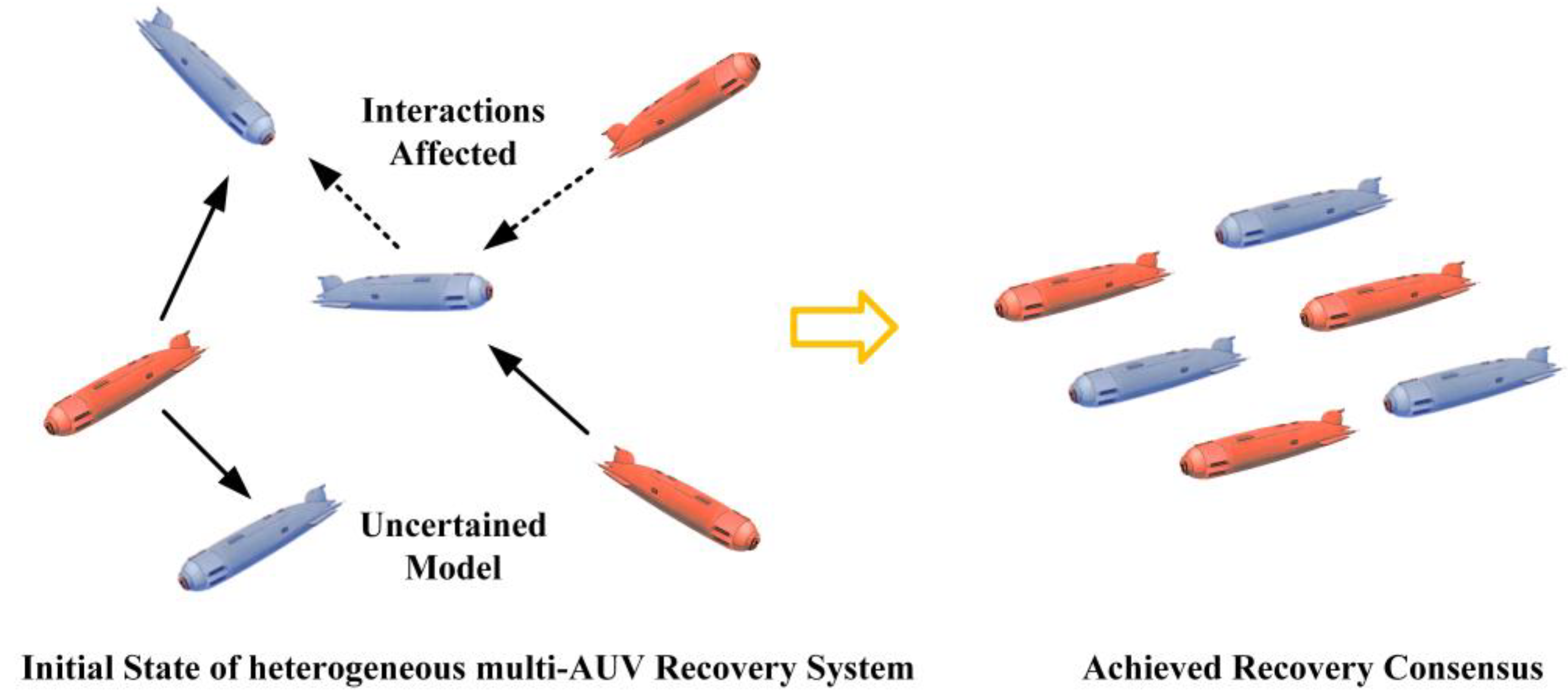
In summary, considering the issues outlined above and recognizing that consensus problems are fundamental to distributed coordination, this paper investigates the consensus control of heterogeneous and uncertain multi-AUV recovery systems in scenarios of implicit reduced visibility, shown in Figure 1. Currently, research on visual coordination consensus is still limited. Given the reduced visual conditions, heterogeneous dynamics, and their uncertainties in practical scenarios, our study aims to address these challenges effectively. Our contributions are as follows:
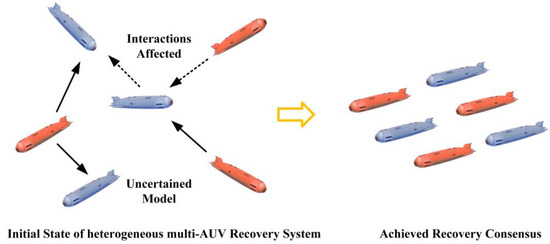
Figure 1.
Recovery process of a heterogeneous visually interactive multi-AUV system. The left part of the figure illustrates the initial state with AUVs randomly distributed and influenced by uncertainties. The right part depicts the successful achievement of recovery consensus.
- (1)
- Establishment of a heterogeneous visual multi-AUV system: We developed a feedback linearization model for a heterogeneous multi-AUV recovery system that considers both dynamic and visual interaction complexities under conditions of model uncertainty. Unlike the model proposed by Ref. [33], our model accounts for real-world uncertainties, making it more practical and applicable.
- (2)
- Introduction of a reference model approach: We introduced an adaptive consensus controller for heterogeneous multi-AUV systems. This controller is designed to operate using only relative information, effectively managing implicit visual interaction limitations and model uncertainties. Compared to Ref. [34], we extended this approach from linear systems to nonlinear AUV models.
- (3)
- Dual validation: We validated the feasibility of our control approach through both stability proofs and numerical simulations. By incorporating uncertainties and considering different visual scenarios, we significantly enhanced the practical applicability of our method in engineering contexts.
The structure of this paper is organized as follows: Section 2 overviews related works on consensus control and coordination. Theoretical foundations, including the low-visibility interaction model, the AUV model, and relevant lemmas, are delineated in Section 3. Section 4 elaborates on the problem’s description and its formulation. The design of the controller and the analysis of convergence are explored in Section 5. Numerical simulations illustrating the theoretical findings are presented in Section 6. This paper concludes with Section 7, offering a summary of the findings and insights gained from the study.
2. Related Works
In recent decades, scholars have conducted extensive and in-depth research on multi-agent consensus control and coordination. Consensus control refers to agents within a team interacting through sensors or communication networks to agree on a common value or state [35,36]. For consensus control, three significant elements are (1) types of agents, (2) control architectures, and (3) interaction mechanisms [37]. Types of agents can be categorized into homogeneous and heterogeneous. Heterogeneous agents have different dynamics [38] or specialize in specific tasks [39]. In contrast, homogeneous agents share identical features. Control architectures can be divided into reactive, deliberative, and hybrid [40]. Reactive control operates on a perception–reaction basis, where agents cooperate based on direct perception, signal broadcast, or environmental changes. It relies on local states for decision-making, making it efficient and effective without requiring high-level communication [41]. Deliberative control, also known as centralized control, uses high-level communication, advanced sensors, and a comprehensive environmental representation for planning actions. The hybrid approach combines both methods, with the deliberative layer focusing on global goal computation and the reactive layer addressing real-time local objectives. Interaction mechanisms are mainly divided into explicit and implicit communication. Explicit communication uses media and devices to transmit specific information, including broadcast and point-to-point communication. Implicit communication involves agents obtaining information through their own sensors and processing it with algorithms [42].
Choosing the appropriate control architecture and interaction mechanism based on the specific problem is crucial for achieving multi-agent coordination. Several successful projects exemplify this principle: the Blueswarm project [9], which relies solely on underwater visual interactions for bionic fish swarms; the Coco project [43], which employs multiple interaction mechanisms for heterogeneous underwater and surface robots; and the Swarmanoid project [44], a heterogeneous swarm of wheeled, climbing, and flying robots, which achieved fully decentralized 3D coordination for search and retrieval tasks. Additionally, there are large-scale particle robotics projects [45] capable of complex movements, and the Kilobot project [46] for large-scale shape formation. Their key elements are summarized in Table 1.

Table 1.
Significant elements of multi-agent coordination projects.
Currently, multi-AUV coordination strategies can be categorized into leader-following and leaderless methods [47]. In the leader-following approach, one or more AUVs act as leaders and assign trajectories to the followers according to specific strategies, ensuring coordination among AUVs [48]. Based on the single-leader strategy, Ref. [49] proposed a distributed fault-tolerant formation scheme designed to address scenarios involving actuator faults, uncertainties, and exogenous disturbances. To ensure stability against perturbations, Ref. [50] designed a compensator for robot formation control based on type-3 fuzzy logic systems and a data-driven control strategy. While the multi-leader strategy is less commonly used, it offers better formation maintenance compared to the single-leader strategy [51]. The virtual leader can also be considered a form of leader-following; within this framework, Ref. [52] derived a fixed-time adaptive fuzzy logic control (FLC) to approximate the unknown dynamics in AUV formation coordination. Although leader-following strategies are simple and effective, they can lead to coordination failure if the leader encounters problems, thus lacking robustness and stability. For this reason, leaderless strategies have garnered increasing attention. Ref. [53] designed a new underwater acoustic topology that uses a leaderless consensus strategy to address bandwidth-limited interaction constraints. Additionally, Ref. [47] used a neural network observer to compensate for the lumped uncertainty in multi-AUV formations within a fixed time frame. The aforementioned studies primarily focus on the dynamic or interaction complexity of AUV systems, considering explicit acoustic interactions and uncertainties. However, while addressing practical issues in AUV coordination, they approach the problem from a single perspective, neglecting the combined complexities of interaction scenarios and model dynamics.
It is noteworthy that achieving consensus in multi-agent systems is often challenged by environmental uncertainties and system dynamics. Under conditions of uncertainty, Ref. [27] examined the robust H2 consensus associated with linear dynamics. Ref. [28] investigated the achievement of distributed consensus in high-order dynamics under mismatched uncertainties, attaining this at a lower interaction cost. Ref. [29] explored the leaderless consensus issue within uncertain high-order nonlinear multi-agent systems, utilizing event-triggered communication. Ref. [30] studied scaled consensus in high-order multi-agent systems with uncertainties, achieving variable-scale position agreement across switching graphs.
In summary, for the study of consensus control in recovery systems under scenarios of implicit reduced visibility, selecting the appropriate control architecture and interaction mechanism, along with addressing uncertainties, is crucial for achieving coordinated multi-AUV systems.
3. Theoretical Foundations
This section provides the foundational concepts and models essential for our study. It covers the reduced visibility interaction model, the AUV model, and relevant lemmas.
3.1. Reduced Visibility Interaction Model
A directed jointly connected graph is employed to depict the multi-AUV visual interaction recovery system under weak communication scenarios [33]. The recovery system consists of N AUVs. The graph outlines the visual interaction topology among N AUVs, with vertices numbered 1 to n, and is uniformly jointly connected [54]. The adjacency matrix of denotes the vision capability of the jth AUV, and is the edge set of . When , the ith AUV shares its location with the jth AUV, ensuring for all . The Laplacian matrix is , with being ’s degree matrix.
3.2. The AUV Model
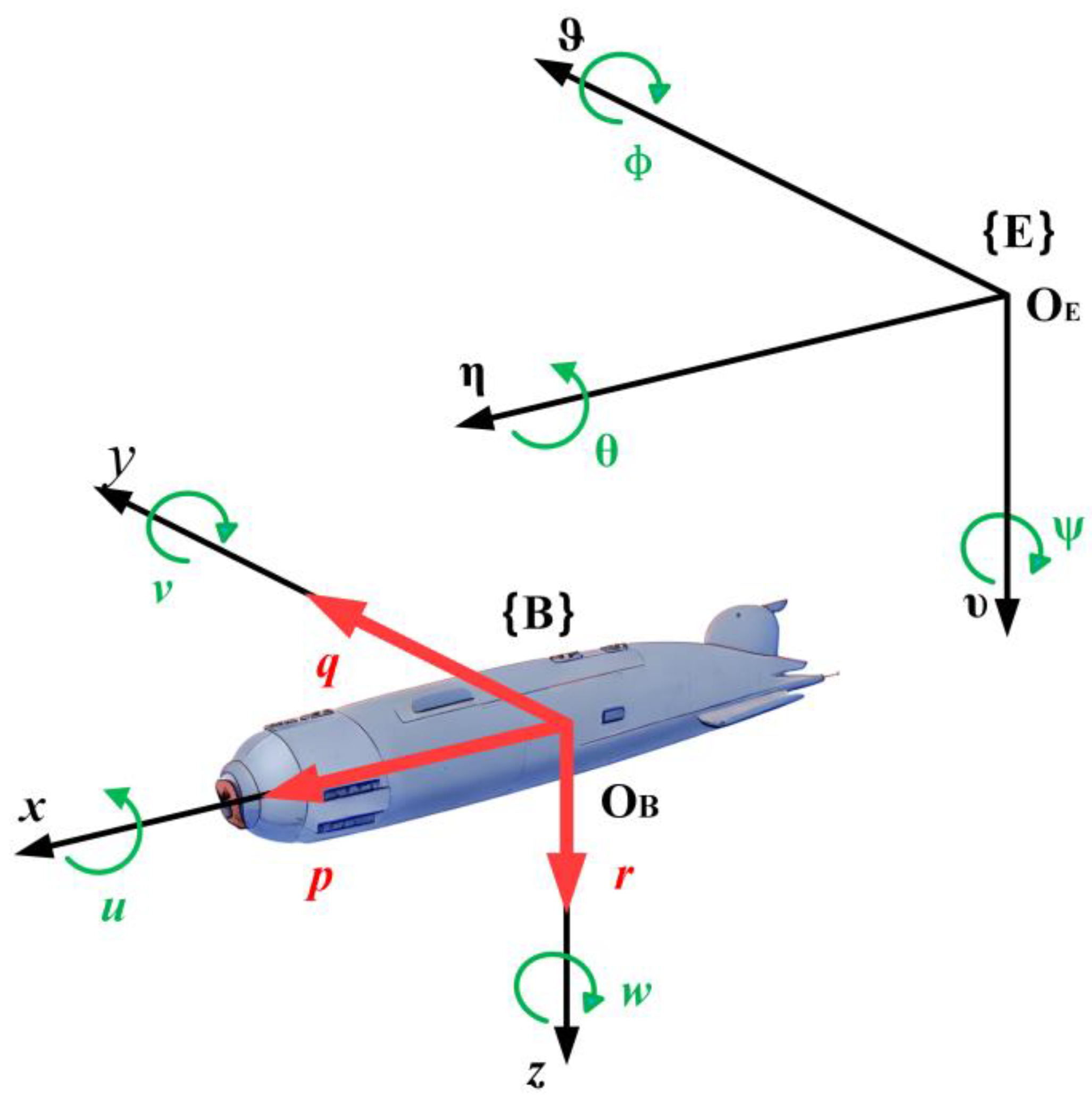
Figure 2 illustrates the five degrees of freedom (DOFs) that underpin dynamic modeling of AUVs, utilizing the earth-fixed and the body-fixed coordinate systems, symbolized by and , respectively. Both systems follow the Cartesian coordinate right-hand rule. Our research focuses on a torpedo-type fully actuated AUV with vertical and horizontal symmetry, intentionally omitting roll speed based on Ref. [55]. The AUV’s symmetrical and dynamic properties guide this simplification, enhancing control efficiency with no loss to performance.
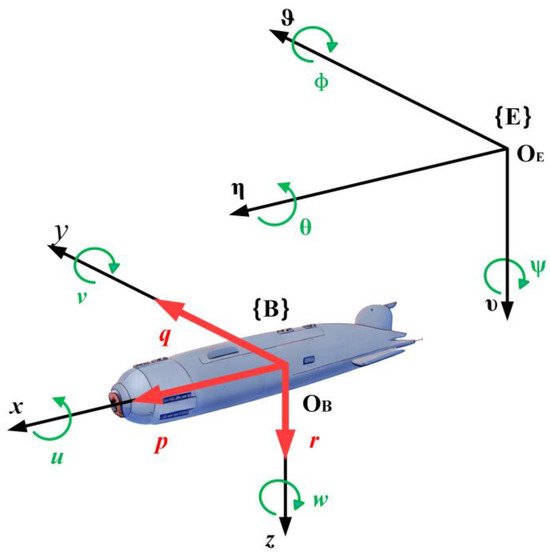
Figure 2.
Coordinate systems for AUV: earth-fixed and body-fixed.
Furthermore, our initial model adopts a 5-DOF structure that includes a nonlinear coupling element to improve precision, as detailed in Equation (1):
In this dynamic model, is the AUV’s positional states in coordinate, and outlines its velocity states in coordinate. ,, , , , and are the inertia mass matrix, the Jacobian transformation matrix, the Coriolis and centripetal matrix, the damping matrix, the hydrostatic force vector, and a vector of control inputs, respectively, as elaborated in Ref. [55].
3.3. Relevant Lemma
Lemma 1.
[56]: Given and belong to , and if there exists some , such that is also in , then .
Lemma 2.
[57]: Consider a system of agents governed by a uniformly jointly connected directed graph. Suppose there is a period , during which the system remains in a uniformly jointly connected state. In this interval, the union graph, denoted by , is the integration of individual directed graphs . It is then ascertained that the system , where is the Laplacian matrix of , can be characterized as Stochastically Indecomposable and Aperiodic (SIA) [58] given that and .
Lemma 3.
[58]: Define as a finite set of SIA matrices. If the product of is SIA for any sequence , then for any infinite sequence , there exists a row vector , such that:
Lemma 4.
[33]: Consider a recovery framework for a heterogeneous multi-AUV recovery system, encompassing distinct units, including both Acceleration-controlled AUV (AC-AUV) and Velocity-controlled AUV (VC-AUV) types, all awaiting recovery. When is met, it signifies that the heterogeneous dynamics system has achieved the critical capability to accomplish the recovery process consensus.
4. Problem Description and Formulation
In this section, we focus on constructing key definitions, establishing necessary conditions and assumptions, and developing models for an uncertain multi-AUV recovery system characterized by heterogeneous dynamics and weak visual interactions.
4.1. Key Definitions and Assumptions
Park et al. [59] suggested using guiding light arrays to combat uneven underwater illumination. Using this mechanism, Berlinger et al. [9] conducted an experimental test on cooperative control within a robotic fish swarm. This uniform guiding light approach meets the underwater consistent illumination requirement. With this foundation, we proceed to define the key concepts and assumptions guiding our study.
Assumption 1.
It is assumed that each AUV possesses the ability to precisely determine its location within a terrestrial coordinate system, leveraging a variety of technical approaches. This assumption is supported by the incorporation of sophisticated navigation technologies, as outlined by Ref. [60].
Definition 1.
In a multi-AUV system, when the visual interaction topology meets the standard for uniform joint connectivity, it is defined under scenarios of weak visual interaction in reduced visibility underwater environments.
Remark 1.
Uniform joint connectivity topology aptly captures the reduced vision conditions in visual interaction settings, where markers are occasionally obscured and false light sources emerge. This concept also effectively characterizes the diversity in visual interactions [33].
Definition 2.
The success of a recovery system in multi-AUV frameworks that operate under implicit collaboration should be delineated by the attainment of a consensus based exclusively on relative position data amidst the non-disclosure of identities among the multi-AUVs.
Definition 3.
In the multi-AUV recovery system, we define the inherent uncertainty as matching uncertainty.
Definition 4.
Following the characterization by Ref. [61], heterogeneity in multi-AUV propulsion systems is described as the existence of different orders within the propulsion mechanisms of distinct AUV units.
The system’s communication structure is modeled as a unified, jointly connected directed topology. The multi-AUVs are classified into VC-AUV and AC-AUV, underscoring their distinct operational characteristics.
4.2. Modeling of Single AUV with Uncertainties
Stemming from Definition 3, corresponding uncertain terms denoted by , an unknown constant, can be incorporated into Equation (1). Consequently, this yields the following second-order AUV model with uncertainty as Equation (3):
Subsequently, the AUV’s dynamic model can be converted into a canonical non-linear function, outlined in Equation (4).
where , , , and . integrates the effects of Coriolis and centripetal , damping and hydrostatic force .
Utilizing the concepts of relative order and Lie derivatives, elucidated in Ref. [62], the feedback model input is expressed as follows:
where , , , , , , , and , can be represented as , where it is understood that certain components of are bounded continuous functions and exhibit Lipschitz continuity. is defined as the part of the control input that includes the compensation for uncertainties.
For a more detailed feedback linearization process incorporating model uncertainties for AUVs, please refer to Ref. [63]. Incorporating model uncertainties, the derived model is as follows:
where .
4.3. Modeling of Heterogeneous Multi-AUV Recovery Systems
Let and represent the two distinct categories of AUVs within the multi-AUV recovery system, specifically, the sets of VC-AUVs and AC-AUVs, respectively. Here, and denote the quantity of AUV in each subgroup, with indicating the recovery system’s total AUV count. The topologies of these subgroups are represented by graphs and , with the associated Laplacian matrices denoted as and . This structure facilitates a systematic exploration of the coordination and dynamics both in and across these diverse AUV groups.
The modeling of VC-AUV adheres to the specific aspects of the first-order dynamics as delineated by Ref. [55]. Regarding VC-AUV, the model integrates uncertainty terms in alignment with Definition 3:
Utilizing analogous modeling techniques, we can readily derive an expression akin to feedback linearization, as delineated in Equation (8):
where , is non-singular, , and satisfies a known upper bound for continuous Lipschitz continuity. Additionally, is an uncertain term.
To simplify subsequent derivations, we distinguish among different groups through the subscripts used in the formula. Consequently, model of the jth VC-AUV characterized by uncertainty within the diverse group, is depicted feedback linearization as follows:
Likewise, the feedback linearization model of the jth AC-AUV characterized by uncertainty within the diverse group, is derived from Equation (6) and is presented as follows:
5. Controller Design and Convergence Analysis
This section details a consensus-based recovery control technique tailored for an uncertain heterogeneous multi-AUV system operating in scenarios with implicit reduced visibility. Subsequently, we derive two theorems pertaining to the stability of the proposed control strategy.
Inspired by the insights gained from the model reference adaptive consensus (MRACon) algorithm as delineated by Ref. [64] and the bipartite consensus framework as elucidated by Ref. [34] within multiple linear systems frameworks, we embark on the controller design for a nonlinear, heterogeneous multi-AUV recovery system. In our design, we consider transforming the second-order multi-AC-AUV model into an equivalent first-order topological representation. This transformation leverages the natural consensus properties of first-order systems under structurally stable conditions, providing a simpler and more favorable foundation for stability proofs. The use of the reference model is primarily motivated by the flexibility and convenience of the model reference consensus method. This approach allows AUVs with the same dynamic order to share a common reference model, facilitating parameter selection in practical applications.
Initially, we formulate reference models for both VC-AUV and AC-AUV, delineated, respectively, in Equations (11) and (12):
For group 1 with VC-AUV:
For group 2 with AC-AUV:
where and . Concurrently, we define the following error:
For group 1 with VC-AUV:
For group 2 with AC-AUV:
In order to ensure the heterogeneous VC-AUV and AC-AUV converge towards the reference model, thereby achieving ultimate consensus, we have designed the following controllers:
For group 1 with VC-AUV:
where is the parameter estimate of , and its updating law can be expressed as:
where is a positive parameter.
For group 2 with AC-AUV:
where , and is the parameter estimate of , and its updating law can be expressed as:
where is a positive parameter, and .
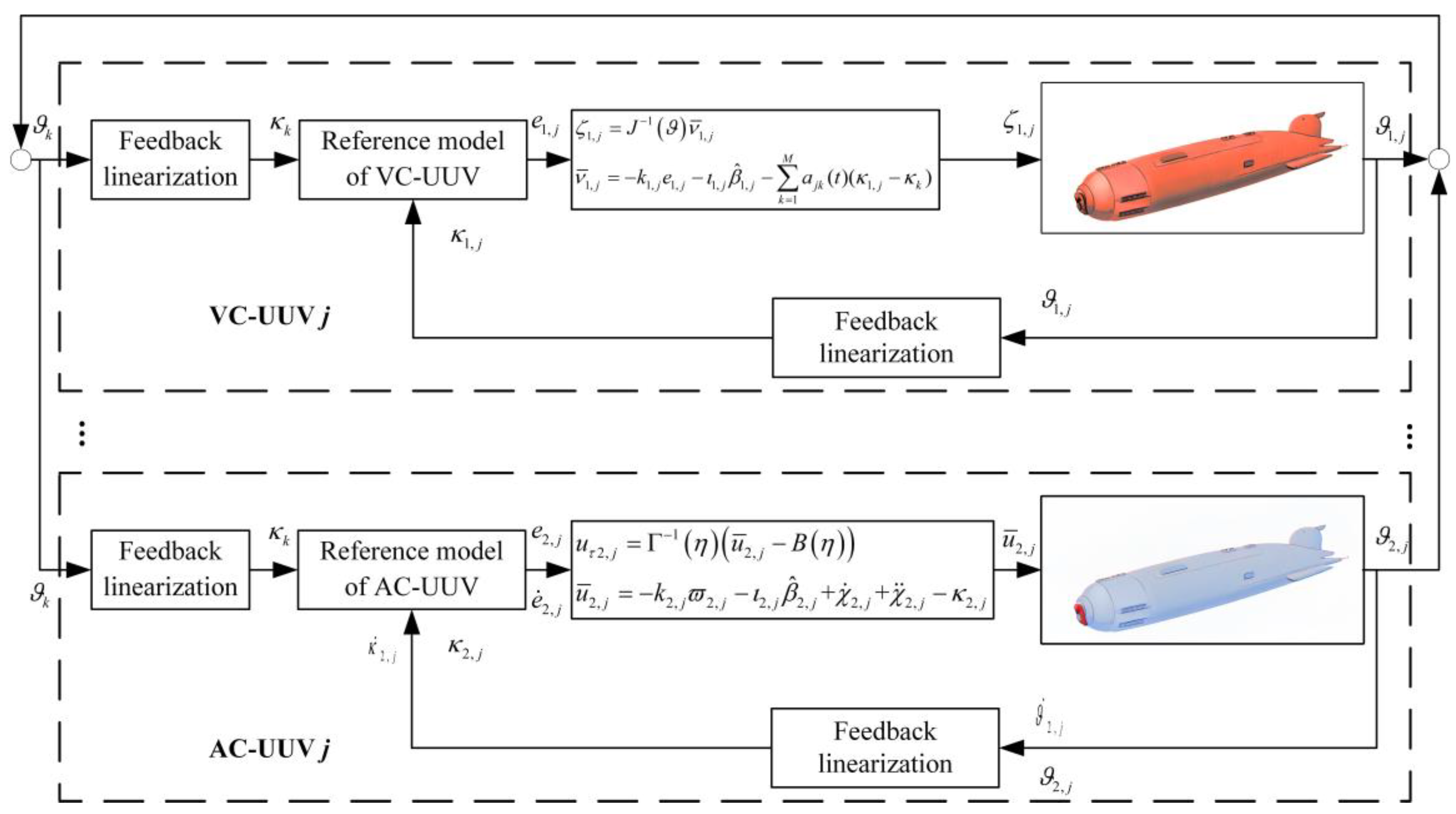
Table 2 presents the models and controllers for designing a consensus controller in an uncertain heterogeneous multi-AUV recovery system, while Figure 3 illustrates the schematic diagram of the consensus control strategy. In Figure 3, the input signals for the heterogeneous AUVs are derived from relative information collected by their own vision sensors.
Table 2.
Uncertain modeling for heterogeneous AUV groups.
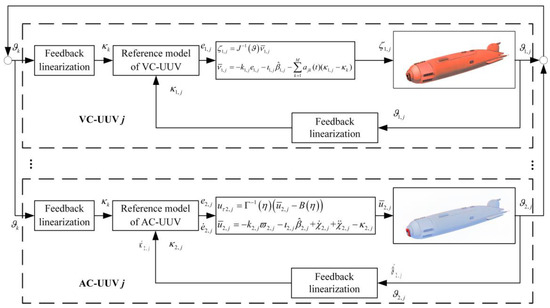
Figure 3.
Framework for leaderless consensus in heterogeneous uncertain multi-AUV recovery system in scenarios of implicit reduced visibility.
Next, we will elucidate the process by which, through the application of the innovative controller designs delineated in Equations (15) and (17) in conjunction with the reference models specified in Equations (11) and (12), the whole recovery system is transfigured into a new framework. In this transformation, we aim to modify the system to align with the methodologies and conclusions associated with first-order systems.
For the composite Laplacian matrix composed of VC-AUV and AC-AUV, specifically pertaining to the visual interaction topology, it is presented as:
where , , , , , and constitute the diagonal matrices, each populated with the diagonal components from and , respectively. Define the transformed node state for AC-AUV as , within , where represents a new node formed through the second-order transformation process. Subsequently, define the vectors , , correspondingly. The additional secondary nodes are based on the second-order states of the AC-AUVs in group 2. Consequently, by establishing , we can reformulate the original reference model Equations (11) and (12) into the new format given by Equation (20):
Upon restructuring Equation (20), we obtain the following formulation:
where is the new restructuring Laplace matrix. This restructuring fundamentally signifies the conversion of a second-order system into a first-order system by adding additional nodes, associated with the AC-AUVs, collectively identified as . The topology corresponding to the restructured is , which maintains the same joint connectivity consistency as . For related properties and proofs, refer to Ref. [32].
Next, we present two theorems on stability.
The first theorem, derived using the Lyapunov method in conjunction with the lemmas presented in Section 2, demonstrates that the controller can effectively converge to the reference model. The second theorem, derived through a combination of lemmas and Theorem 1, addresses the attainment of recovery consensus among heterogeneous uncertain multi-AUVs in scenarios characterized by implicit reduced visibility.
Theorem 1.
Controllers designed in accordance with Equations (15) and (17) can respectively ensure the convergence of VC-AUV and AC-AUV to the positions specified by the corresponding reference models outlined in Equations (11) and (12).
Proof.
See Appendix A. □
Theorem 2.
In a heterogeneous multi-AUV recovery system with inherent uncertainties, VC-AUV and AC-AUV are respectively governed by controller Equations (15) and (17), guided by adaptive rates Equations (16) and (18), and adhere to reference models Equations (11) and (12). Despite implicit low-visibility interaction, this structured approach ensures effective recovery of heterogeneous multi-AUV, ultimately achieving a state of leaderless consensus.
Proof.
See Appendix B. □
6. Simulation Results
This section validates the efficacy and superiority of the proposed algorithm within a three-dimensional space.
6.1. Validation of Algorithm Efficacy
6.1.1. Simulation Setup and Parameter Selection
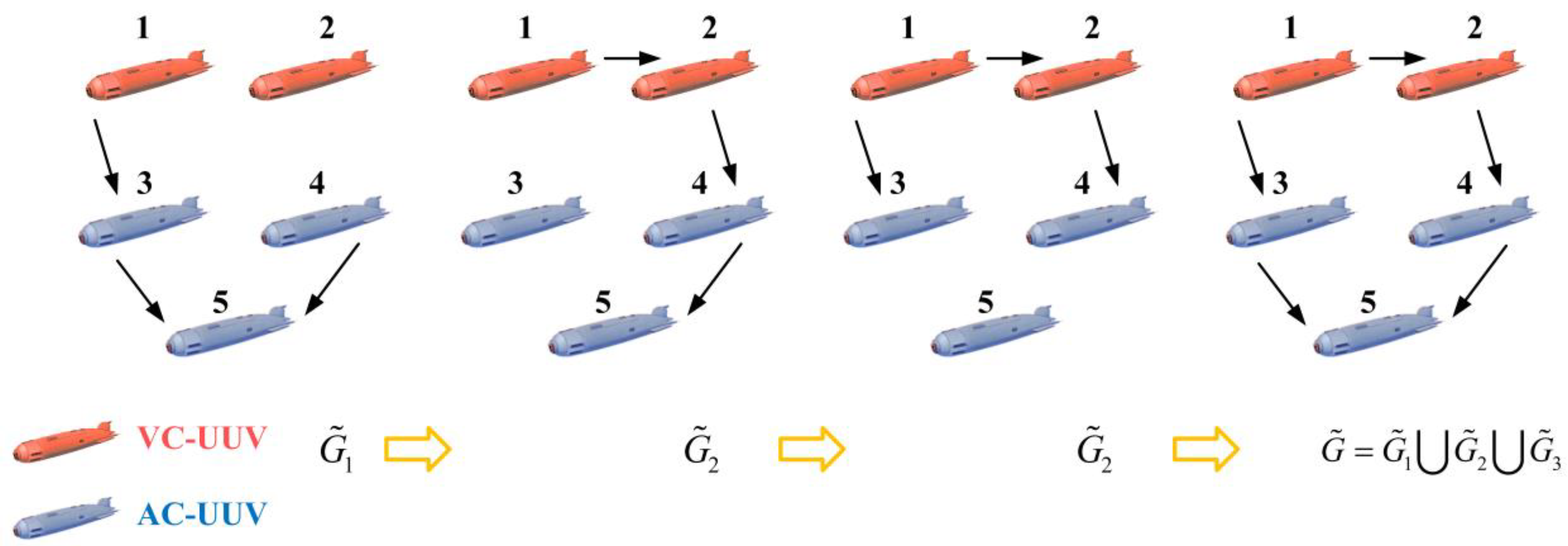
Owing to spatial constraints, the analysis is concentrated on a recovery system consisting of two VC-AUVs (red) and three AC-AUVs (blue), which collectively form a multi-AUV visual recovery system. We conducted simulations for the consensus control of five heterogeneous AUVs using a Python environment on a laptop equipped with an Intel Core i7-8750H processor. The simulations utilized numerical computations with libraries such as NumPy and SciPy. Figure 4 distinctively illustrates a potential dynamic development of the visual information interaction patterns among the AUVs throughout the duration denoted by . This specific time period, τ, has been established as 0.6 s, accompanied by a sampling time of 0.2 s. Notably, the cumulative structure of interactions over the time interval denoted as forms a directed spanning tree.
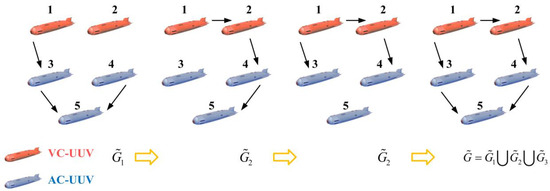
Figure 4.
Heterogeneous multi-AUV interaction patterns in reduced visibility scenarios.
The heterogeneous multi-AUV system is initially distributed randomly within a maritime domain measuring 50 × 30 × 10 m. This range is designed based on the successful underwater single AUV vision docking experiments referenced in Ref. [65], ensuring the physical feasibility of the reduced visual interaction conditions proposed in this study. The initial settings for this configuration are detailed in Table 3.
Table 3.
Initial state.
In terms of controller parameter selection and adjustment, considering that the main thruster of an AUV typically exhibits faster and higher response capabilities, the control parameter for the longitudinal direction should initially be set to a larger value. This provides a foundation for adjusting the control gains in other degrees of freedom. The parameter , which serves as the damping parameter to regulate the system’s response speed and balance internal and external influences within the multi-AUV system, follows the design outlined in our previous paper [33]. For the adaptive parameters in the reference model, larger values enable the system to respond more quickly to changes in uncertainty, albeit at the risk of instability or oscillation. Conversely, smaller values of result in slower adjustments but greater stability. In practice, it is advisable to initially set to a slightly smaller value. When adjusting , should be appropriately adjusted.
For VC-AUVs, the parameters are established as , and . In contrast, for AC-AUV controllers, the parameters are defined as , , and . Additionally, the uncertainties for VC-AUVs are denoted as and for AC-AUVs as , following the ratios given in Ref. [66] with suitable saturation upper limits implemented for the input. The entire experiment is observed over a temporal scope extending from 0 to 800 s.
6.1.2. Results and Analysis
The simulation outcomes for the heterogeneous multi-AUV recovery process in scenarios characterized by implicit reduced visibility interactions are illustrated through the application of AUV consensus controllers, as delineated by Equations (15) and (17). Corresponding adaptive parameters are outlined by Equations (16) and (18). The most critical results are summarized in Table 4, and the detailed simulation results are shown in Figure 5, Figure 6 and Figure 7.
Table 4.
Simulation performance.
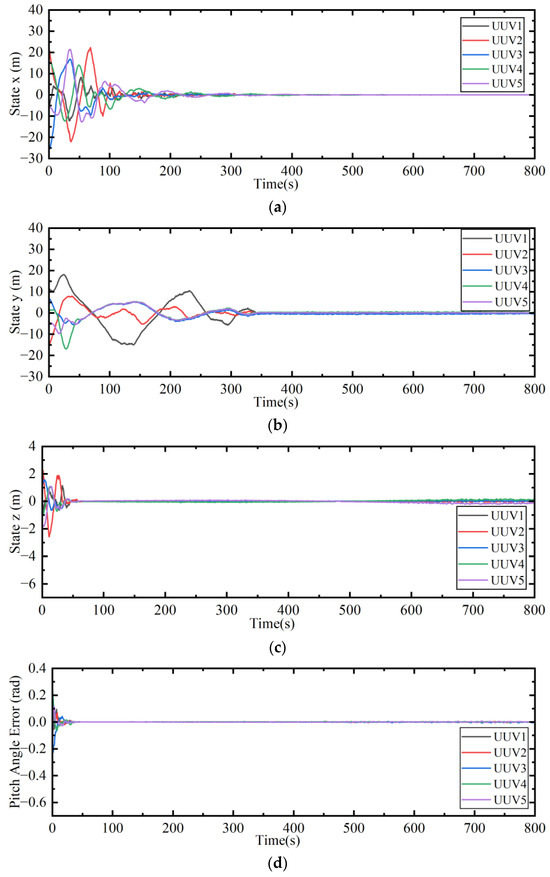
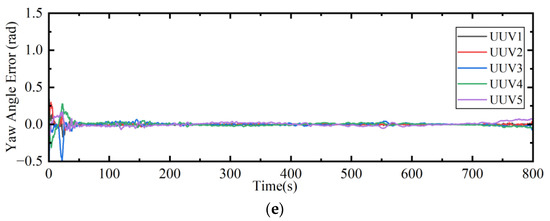
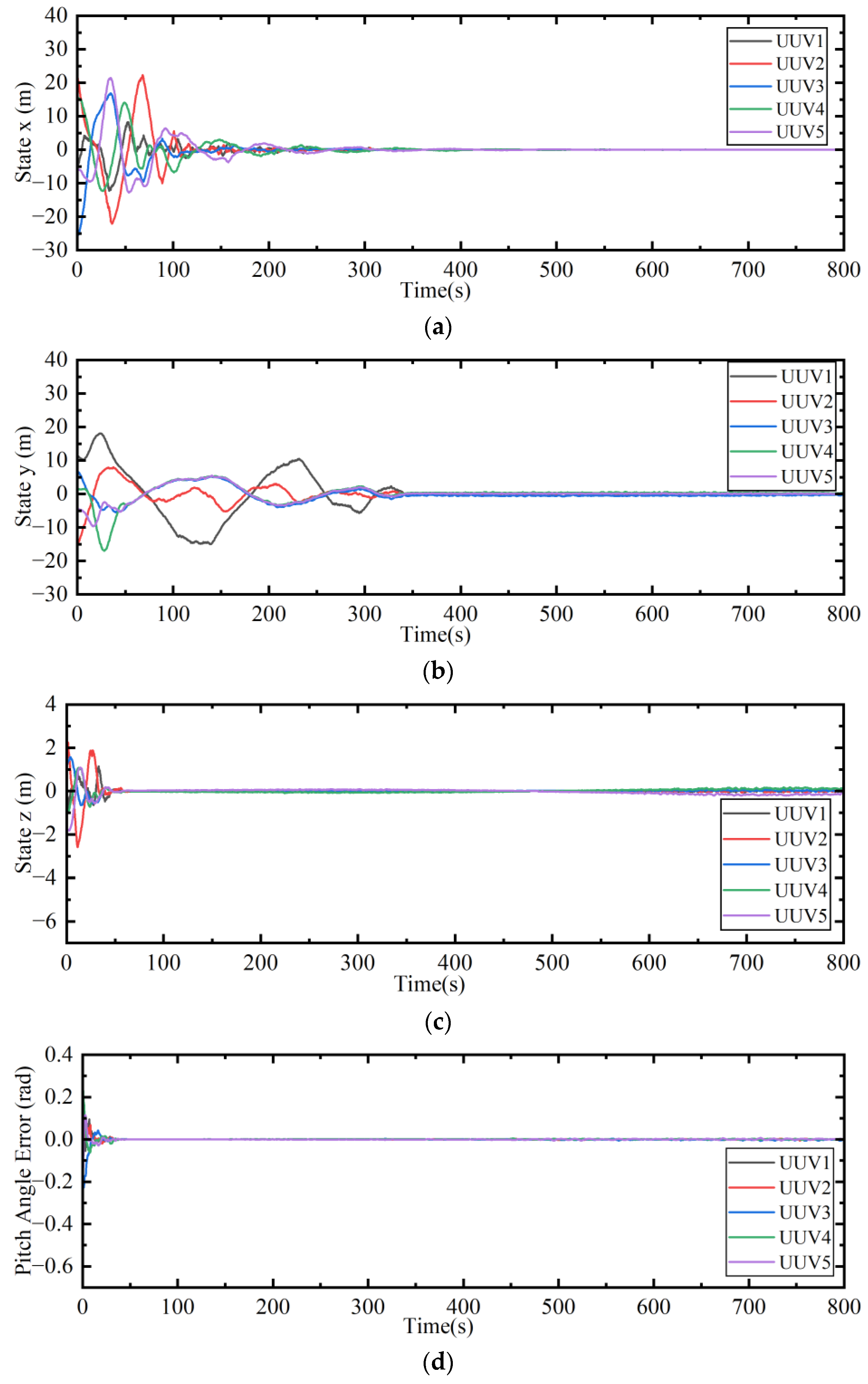
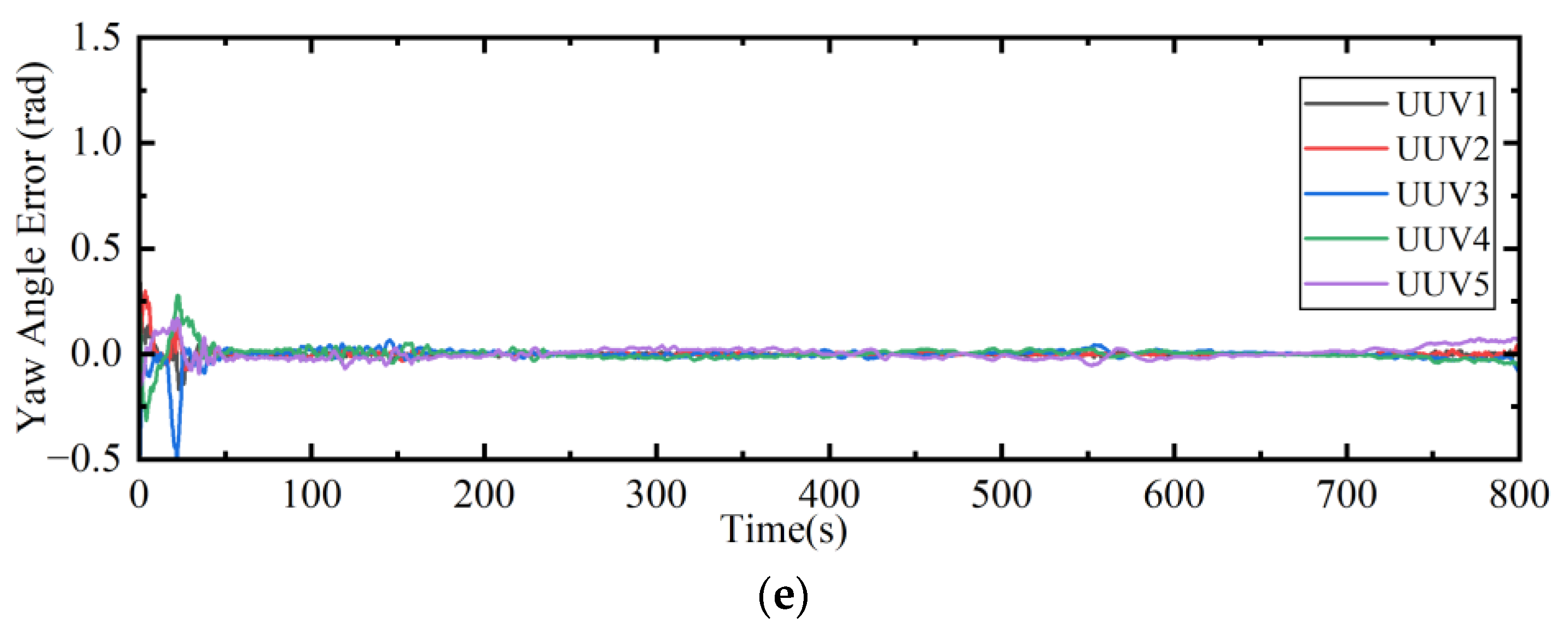
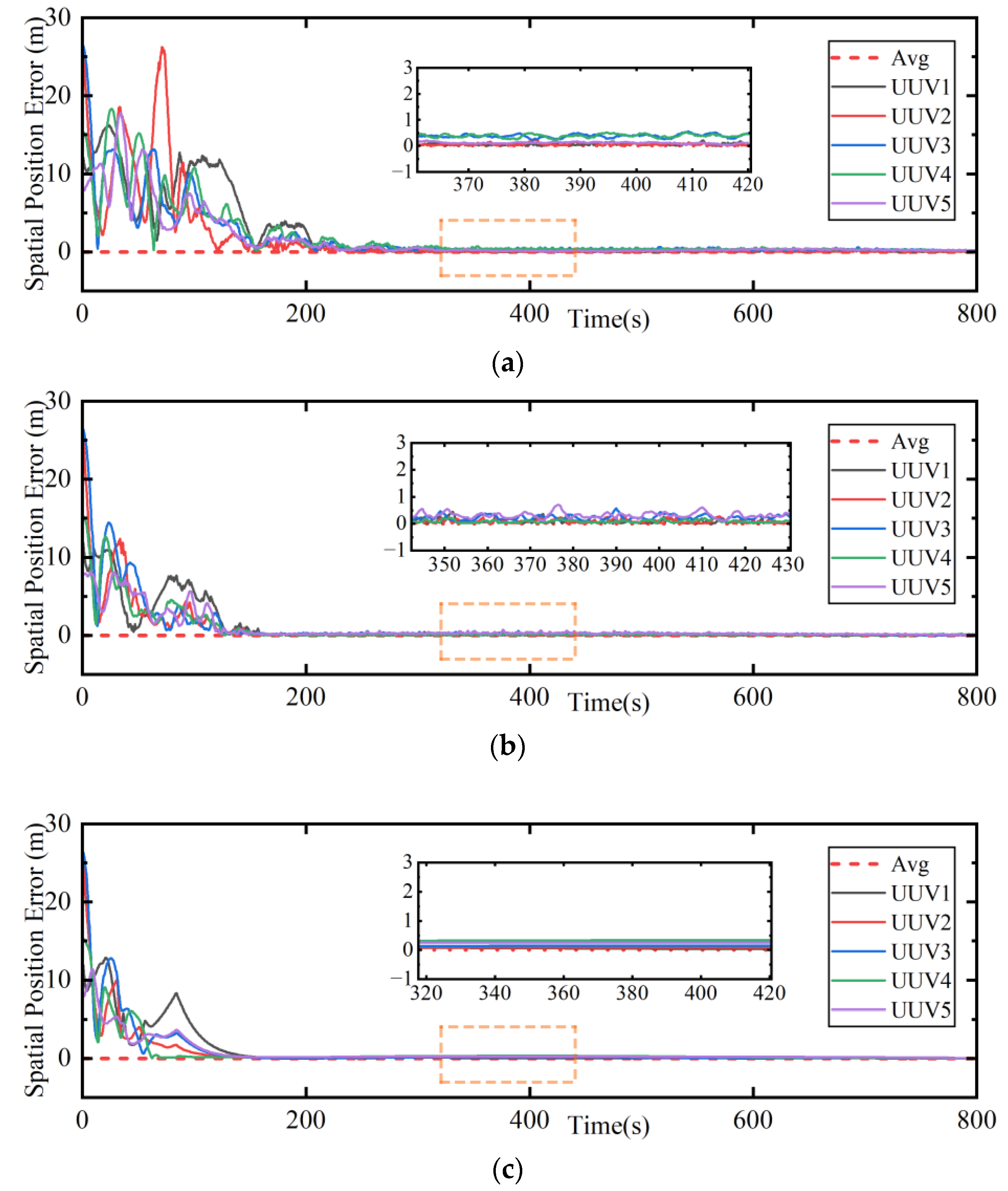
Figure 5.
Pose state error of the heterogeneous multi-AUV recovery system, (a) state x, (b) state y, (c) state z, (d) pitch angle, and (e) yaw angle.
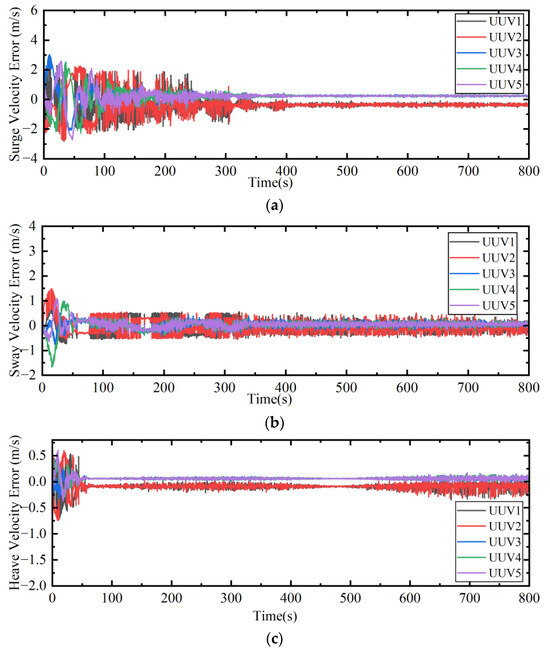
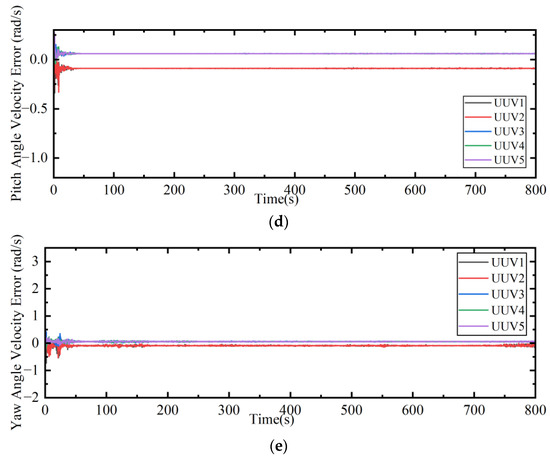
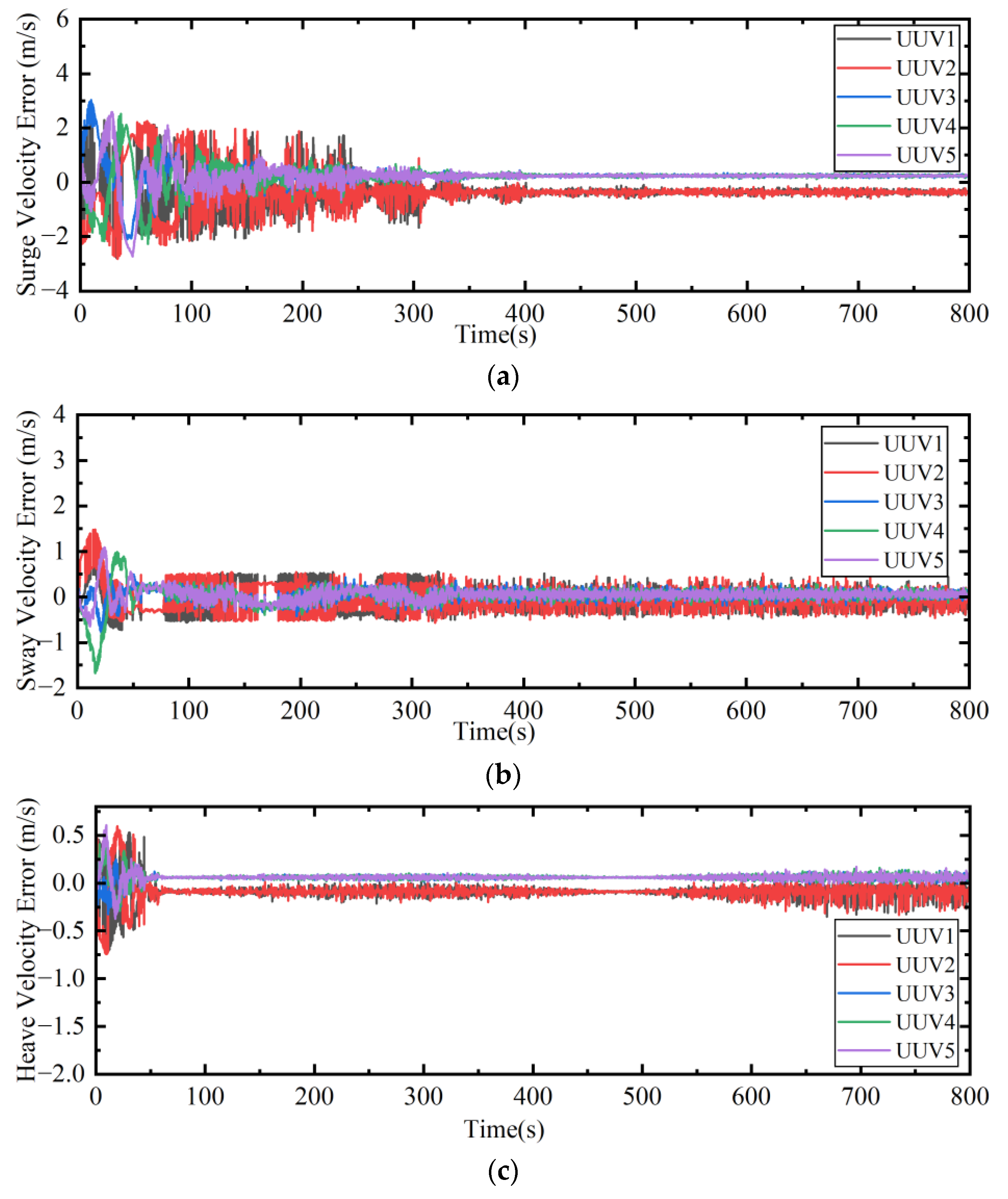
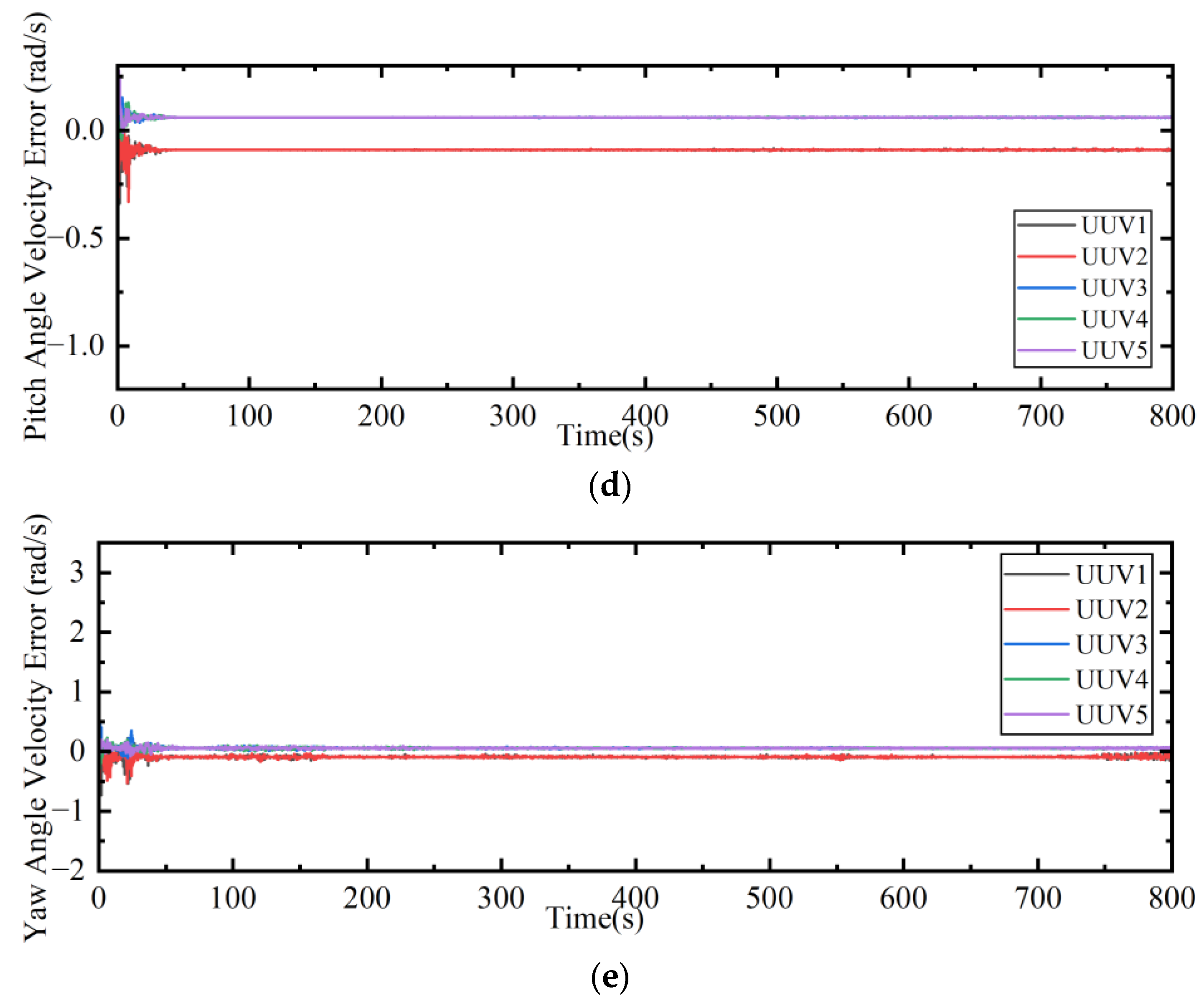
Figure 6.
Velocity error of the heterogeneous multi-AUV recovery system, (a) surge velocity, (b) sway velocity, (c) heave velocity, (d) pitch angle velocity, and (e) yaw angle velocity.
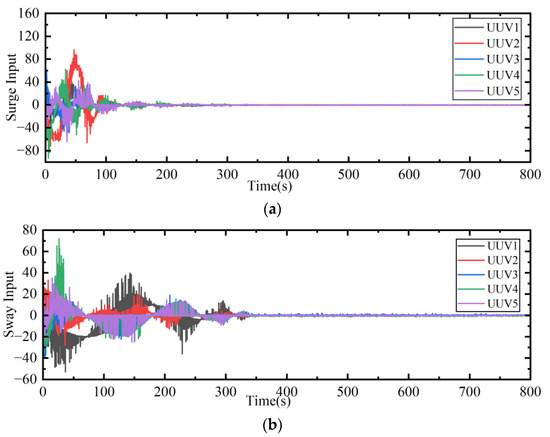
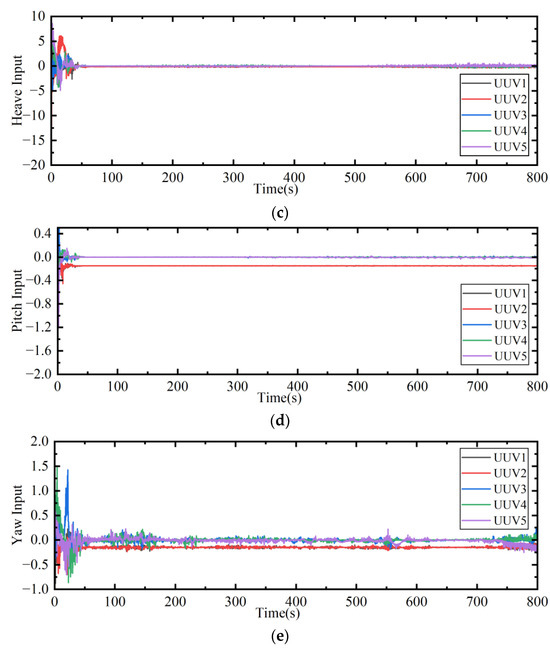
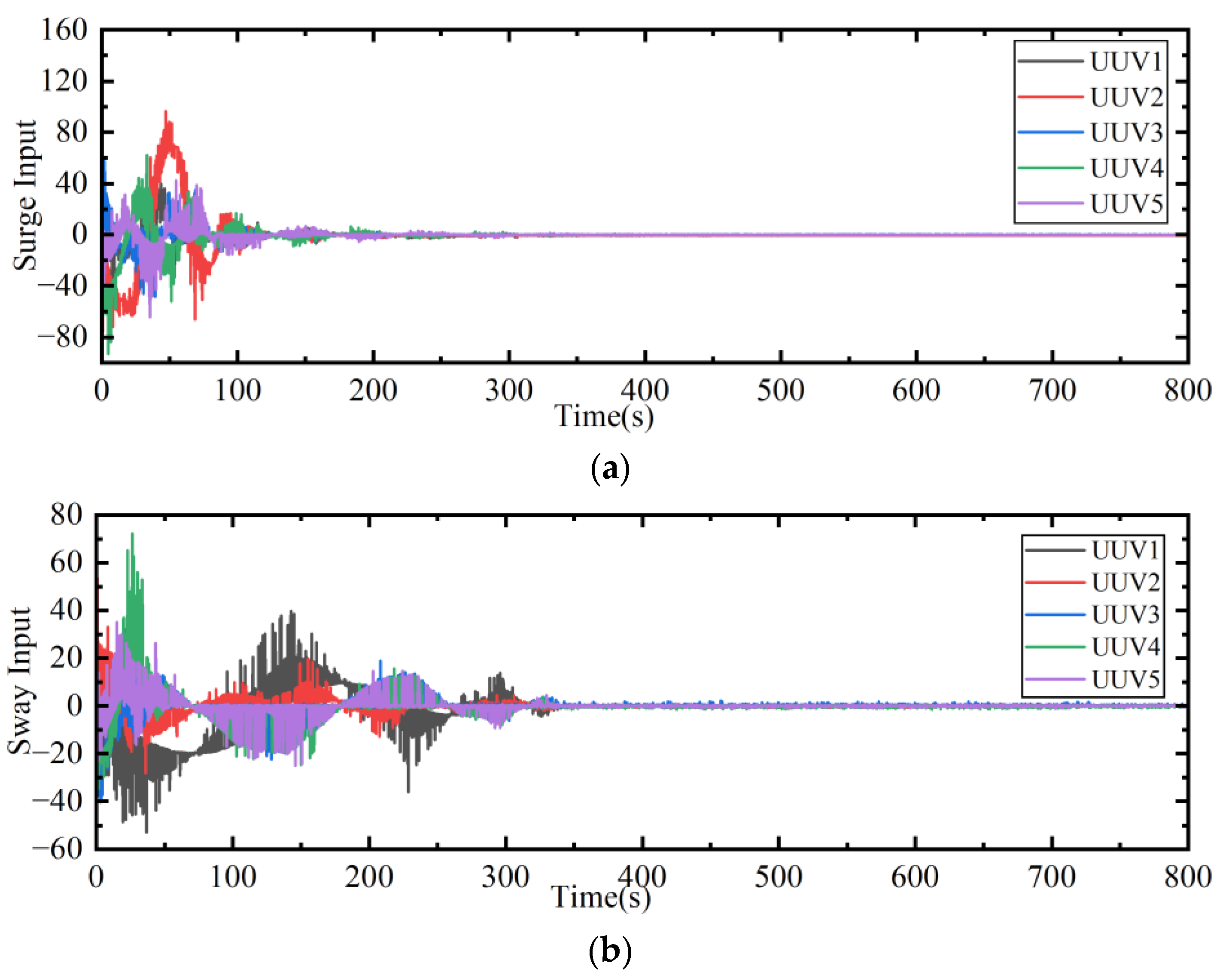
Figure 7.
Input action, (a) surge, (b) sway, (c) heave, (d) pitch, and (e) yaw.
Figure 5, Figure 6 and Figure 7 present the variation of pose (position and attitude) error and velocity error, respectively, and control input actions for this heterogeneous multi-AUV recovery system characterized by significant matching uncertainties, operating within scenarios of implicit low-visibility. The red and black lines represent two VC-AUVs, while the blue, green, and purple lines correspond to three AC-AUVs.
In Figure 5, both VC-AUVs and AC-AUVs demonstrate convergence of position and attitude errors towards the vicinity of zero. In the case of VC-AUVs, direct velocity control results in a comparatively less smooth trajectory, whereas for AC-AUVs, the spatial pose variations are relatively smoother due to the control of forces and torques. Figure 6 illustrates that the linear and angular velocities of both VC-AUVs and AC-AUVs eventually stabilize. The presence of uncertainty within the velocity channel of VC-AUVs is reflected by the steady-state errors in the curves corresponding to VC-AUVs. In Figure 7, it can be observed that the control inputs for surge, sway, and yaw exhibit significant peaks initially, followed by gradual stabilization. This reflects the system’s rapid adjustment under initial conditions. Conversely, the control inputs for pitch and heave show smaller variations, indicating that the control demand in these directions is relatively low and that the controller exhibits greater stability in these directions.
Furthermore, as evidenced by Figure 5, Figure 6 and Figure 7, and in conjunction with the spatial position error shown in Figure 8b (which more intuitively demonstrates the achievement of position consistency), it is observed that the pose and velocity states of the heterogeneous and uncertain multi-AUV recovery system converge towards a common station point within 350 s, achieving consistency. This outcome substantiates the good performance of the algorithm presented in scenarios characterized by implicit reduced visibility and uncertain dynamics.
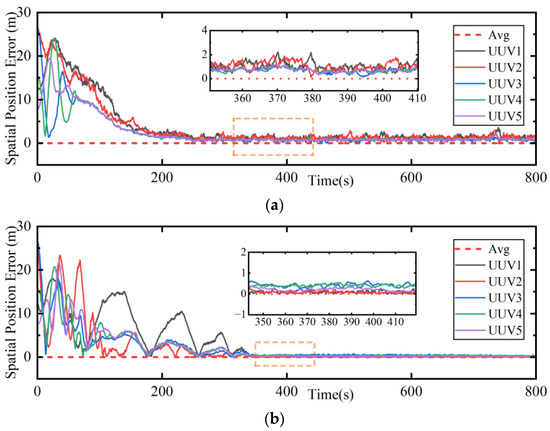
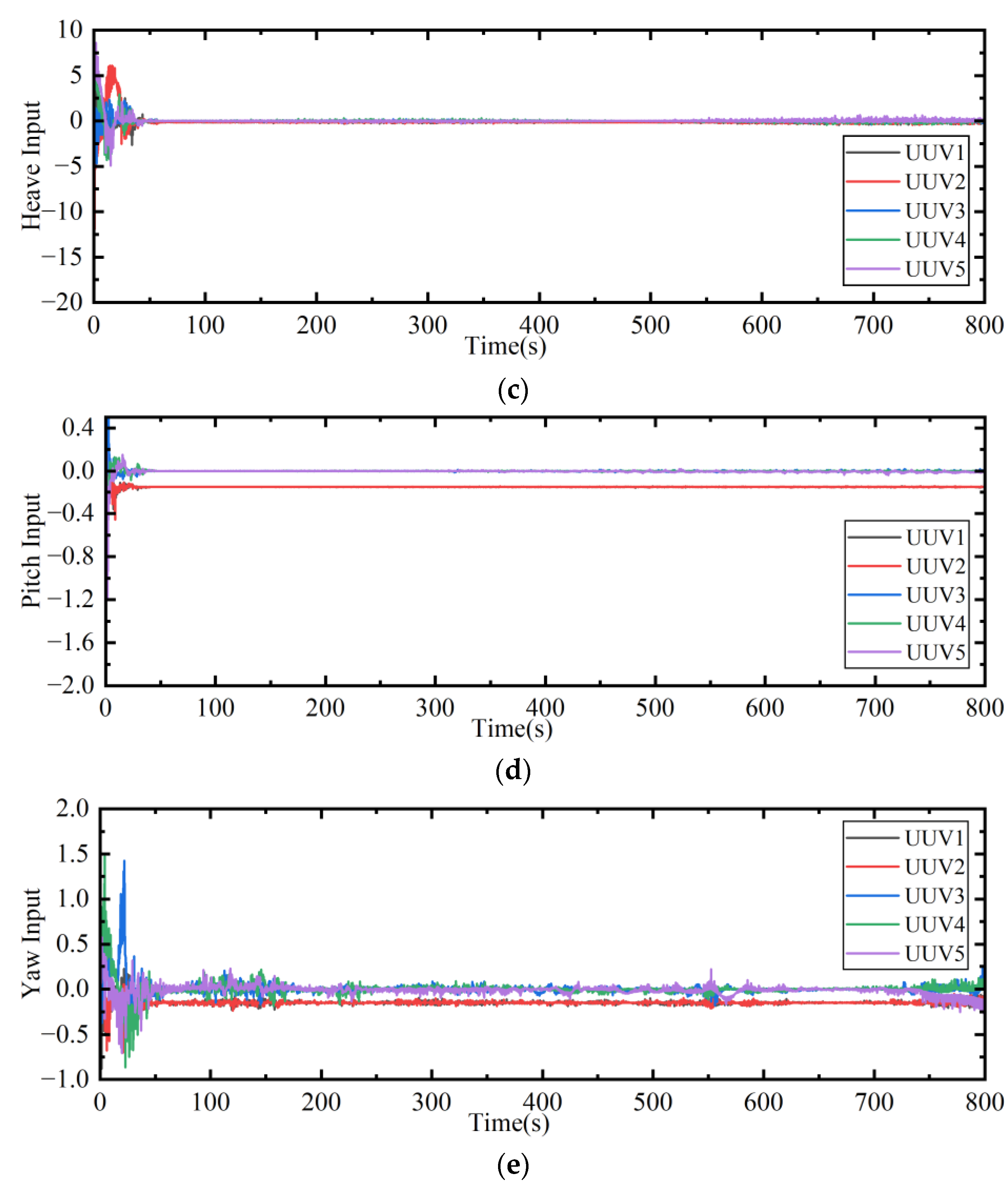
Figure 8.
Spatial position error. (a) Method in Ref. [33]; (b) proposed method.
The proposed algorithm demonstrates initial condition insensitivity, provided that a certain level of topological interaction is maintained. The initial positions are assigned randomly, and under the condition of reduced visual interaction, the variation in initial positions primarily affects the convergence time. The key to achieving stable consistency and high performance lies in the structure of the interaction topology, which is thoroughly discussed in the following sections.
6.2. Superiority Comparison and Performance Analysis
To verify the superiority of our algorithm, we compared it with the algorithm in Ref. [33] using the spatial error graphs for a direct comparison, as shown in Figure 8. We chose to compare with Ref. [33] because it represents the state of the art in the field and is the most relevant benchmark for our study. From the figure, it is evident that both algorithms achieve a certain degree of consistency under reduced visibility conditions in a heterogeneous multi-AUV system, but their performance differs. The algorithm from Ref. [33] converged around 300 s, exhibiting a steady-state bias of approximately 0.5 m and a steady-state error of about 1.5 m. In contrast, our proposed algorithm converged around 350 s, showing a steady-state bias of approximately 0.5 m and achieving the same level of stability as the algorithm in Ref. [33] at 300 s. Additionally, our algorithm improved the final accuracy by about 60%, highlighting its superiority.
We analyze the performance of the proposed algorithm under different scenarios of implicit visibility based on realistic underwater environments. The four visual interaction conditions are defined as follows:
Ideal Visual Interaction: Ensures absolute visual detection stability, described by a fixed directed spanning tree topology.
Good Visual Interaction: Occasional recognition failures but overall consistent AUV interactions, described by a switching directed spanning tree topology.
Regular Visual Interaction: Increased recognition failure probability, maintaining AUV interactions over short intervals, described by a joint connectivity graph with a smaller parameter.
Reduced Visual Interaction: AUV interactions maintained over longer intervals, described by a joint connectivity graph with a larger parameter.
The simulation results are shown in Figure 9, and the corresponding performance metrics are listed in Table 5.
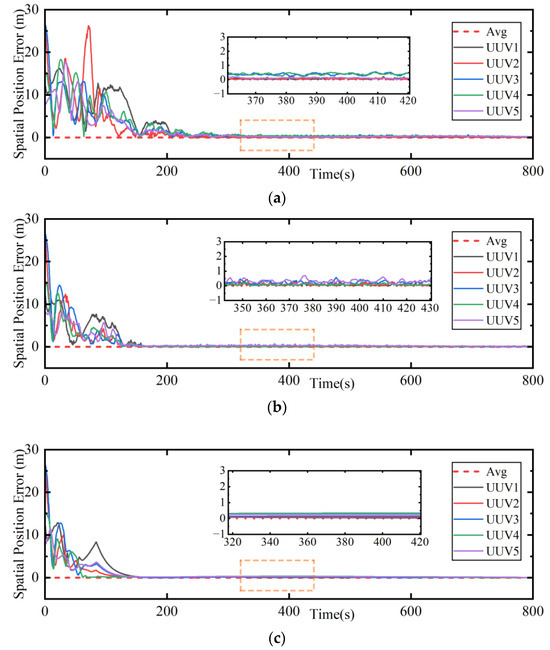
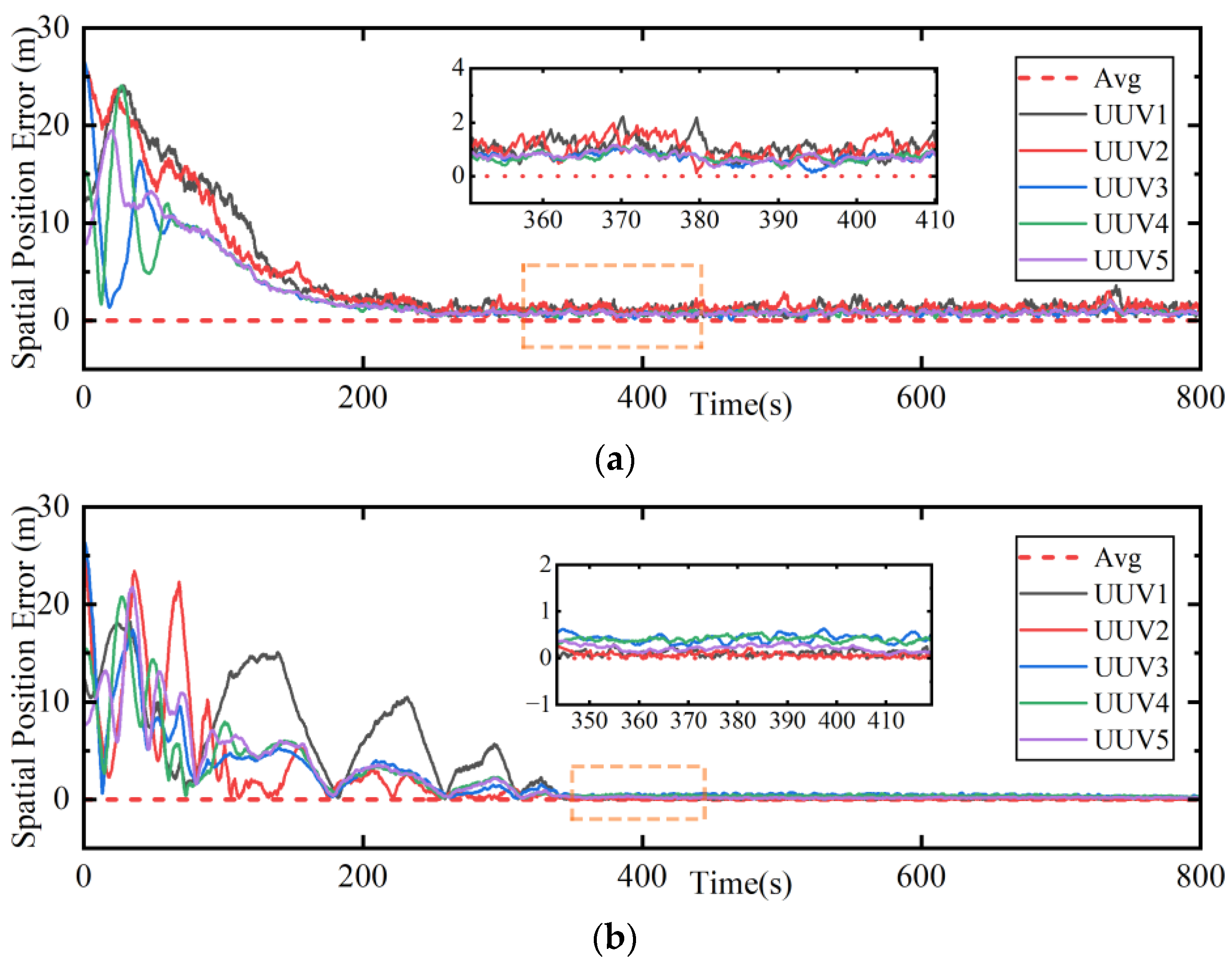
Figure 9.
Spatial position error under different visual interaction scenarios. (a) Regular visual interaction, (b) good visual interaction, and (c) ideal visual interaction.
Table 5.
Performance under different visual interaction scenarios.
By comparing Table 5 with Figure 8b and Figure 9, we can clearly see that the proposed control algorithm achieves consistency and high accuracy under different visual conditions. Under regular and reduced interaction conditions in Figure 8b and Figure 9a the system exhibits significant overshoot. This is due to the continuously changing visual detection targets, and under the conditions of the joint connectivity graph, AUVs are not always able to directly or indirectly establish connections with other members at all times. In Figure 8b and Figure 9a,b, the system still exhibits some oscillations even when approaching convergence. This is because the interactions within the system are constantly changing, leading to inherent oscillations and fluctuations. Furthermore, as shown in Figure 9c, if the visual conditions are optimal and each AUV detects relatively stable targets, the chattering can be eliminated.
In summary, our consensus algorithm demonstrates significant advantages in addressing the uncertainties of heterogeneous multi-AUV systems using only relative information. It shows good adaptability across different visual interaction scenarios, with better interaction conditions leading to faster and more accurate system performance.
7. Conclusions
This paper investigates consensus control in uncertain heterogeneous multi-AUV systems within implicit reduced visibility underwater scenarios. We establish a complex interaction and dynamic for uncertain AC-AUVs and VC-AUVs through feedback linearization and joint connectivity topologies. Based on this, we design an implicit consensus controller using a reference model approach, utilizing only relative information to achieve consensus under reduced visual interaction. The stability of the proposed consensus method is proven using Lyapunov theory and related lemmas. Our simulations across different algorithms and scenarios validated the superiority and adaptability of our approach, demonstrating approximately a 60% improvement in accuracy compared to the algorithms in Ref. [33].
For future research, we should consider factors such as collision avoidance and ocean current disturbances. Collision avoidance may require real-time trajectory adjustments, potentially impacting consensus maintenance. Ocean current disturbances could introduce additional dynamic challenges, necessitating further adaptability of our algorithm. Addressing these factors will enhance the robustness and practical applicability of our consensus control method in real-world underwater environments.
Author Contributions
Z.L.: Investigation, Writing—Original Draft and Editing. W.Z.: Investigation, Funding acquisition. W.W.: Data Curation. Y.S.: Figure Optimization. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by National Natural Science Foundation of China (Research No: E1102/52071108). China Scholarship Council (No. 202306680044). Heilongjiang Province Natural Science Foundation (Research No: JJ2021JQ0075). National Natural Science Foundation of China (No: 52171297). Fundamental Research Funds for the Central Universities (No: 3072022FSC0401).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Appendix A
Proof of Theorem 1.
For group 1 with VC-AUV, let , define the following Lyapunov function:
Substituting Equation (13) into Equation (11) yields the following:
Differentiating Equation (13) results in the following:
Taking the time derivative of and substituting Equations (A3) and (15) into the resulting equation, we obtain:
When the adaptive control rate satisfies Equation (16), then Equation (A4) can be expressed as:
It can be proven that the error remains stable. Next, we will demonstrate that the equilibrium point is zero.
By the definition of , it is known that . From Equations (A1) and (A5), it is followed that . By applying Lemma 1, we can infer that the final controller given by Equation (15) can achieve tracking of the reference model specified in Equation (11), that is, .
For group 2 with AC-AUV, let , define the following Lyapunov function:
Taking the derivative of ,we have:
Taking the time derivative of , we have:
When the adaptive control rate satisfies Equation (18), then Equation (A8) can be expressed as:
It can be proven that the error remains stable. Next, we will demonstrate that the equilibrium point is zero.
According to the definition of , it is known that . Following Equations (A6) and (A9), it is derived that . From Equation (5), it is known that . By applying Lemma 1, we can deduce that the final controller given by Equation (17) can achieve tracking of the reference model specified in Equation (12), that is, . □
Appendix B
Proof of Theorem 2.
Ensuring that and share identical properties of joint connectivity and consensus, Equation (21) undergoes a linear transformation, resulting in:
In light of Lemma 2, for the duration between and , given , the sequence of time instances within this interval is bound to be finite. Therefore, Equation (A10) is redefined as Equation (A11):
where , with indicating the most recent time instance before where the system is uniformly jointly connected, satisfying . Referencing Lemma 3, as , the subsequent condition is confirmed:
here, represents a row vector. Subsequently, it is established that:
This finding indicates that in Equation (A13) is predisposed to converge to a fixed point in a finite time span, which implies the asymptotic stability of the system outlined in Equation (A10).
Employing Theorem 2, it is substantiated that within the framework of the reference models outlined in Equations (11) and (12), and under the reduced visibility interaction patterns detailed in Definition 1, the reference models of each AUV within the heterogeneous uncertain multi-AUV system are ultimately achieving consistency, i.e., . Furthermore, building on Theorem 1, it enables each AUV within the heterogeneous multi-AUV system to closely follow its reference model, i.e., . With the incorporation of Lemma 4, it is demonstrated that this heterogeneous uncertain multi-AUV recovery system can ultimately attain stable recovery. □
References
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.-T.; Thang, Q.; Duc, T.; Hoang, Q.-D.; Le, T.-H. Station-Keeping Control of a Hovering over-Actuated Autonomous Underwater Vehicle under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Li, T.; Bai, W.; Liu, Q.; Long, Y.; Chen, C.P. Distributed Fault-Tolerant Containment Control Protocols for the Discrete-Time Multiagent Systems via Reinforcement Learning Method. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 3979–3991. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.; Zhang, M.; Zhou, J.; Yue, L. Distributed Lyapunov-Based Model Predictive Control for AUV Formation Systems with Multiple Constraints. J. Mar. Sci. Eng. 2024, 12, 363. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S. Multi-AUV Adaptive Path Planning and Cooperative Sampling for Ocean Scalar Field Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Liao, Y.; Chen, C.; Du, T.; Sun, J.; Xin, Y.; Zhai, Z.; Wang, B.; Li, Y.; Pang, S. Research on Disturbance Rejection Motion Control Method of USV for UUV Recovery. J. Field Robot. 2023, 40, 574–594. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, W.; Fei, M.; Yan, H. An Unmanned Surface Vehicle for the Launch and Recovery of Autonomous Underwater Vehicles: A Novel Design. IEEE Robot. Autom. Mag. 2024, 31, 53–61. [Google Scholar] [CrossRef]
- Xia, G.; Zhang, Y.; Zhang, W.; Zhang, K.; Yang, H. Robust Adaptive Super-Twisting Sliding Mode Formation Controller for Homing of Multi-Underactuated AUV Recovery System with Uncertainties. ISA Trans. 2022, 130, 136–151. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Li, Z.; Zeng, J.; Wu, W. Distributed Event-Triggered Coordinated Control for Multi-UUV Recovery System with Time Delay. Ocean Eng. 2023, 283, 115138. [Google Scholar] [CrossRef]
- Berlinger, F.; Gauci, M.; Nagpal, R. Implicit Coordination for 3D Underwater Collective Behaviors in a Fish-Inspired Robot Swarm. Sci. Robot. 2021, 6, eabd8668. [Google Scholar] [CrossRef] [PubMed]
- Yao, P.; Sui, X.; Liu, Y.; Zhao, Z. Vision-Based Environment Perception and Autonomous Obstacle Avoidance for Unmanned Underwater Vehicle. Appl. Ocean Res. 2023, 134, 103510. [Google Scholar] [CrossRef]
- Liu, C.; Wen, J.; Huang, J.; Lin, W.; Wu, B.; Xie, N.; Zou, T. Lightweight Underwater Object Detection Algorithm for Embedded Deployment Using Higher-Order Information and Image Enhancement. J. Mar. Sci. Eng. 2024, 12, 506. [Google Scholar] [CrossRef]
- Peng, C.; Jin, S.; Bian, G.; Cui, Y.; Wang, M. Sample Augmentation Method for Side-Scan Sonar Underwater Target Images Based on CBL-sinGAN. J. Mar. Sci. Eng. 2024, 12, 467. [Google Scholar] [CrossRef]
- Zhang, W.; Li, Z.; Gong, P.; Pan, J.; Wu, W. Visual Location Method Based on Asymmetric Guiding Light Array in UUV Recovery Progress. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2671–2675. [Google Scholar]
- Li, Z.; Zhang, W.; Wu, W.; Du, X.; Han, A. Image-Based Visual Servo Control for UUV Recovery System under Field of View Constraints. In Proceedings of the OCEANS 2023—Limerick, OCEANS Limerick 2023, Limerick, Ireland, 5–8 June 2023. [Google Scholar]
- Yu, B.; Wu, J.; Islam, M.J. Udepth: Fast Monocular Depth Estimation for Visually-Guided Underwater Robots. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; IEEE: New York, NY, USA, 2023; pp. 3116–3123. [Google Scholar]
- Meng, C.; Zhang, W.; Du, X. Finite-Time Extended State Observer Based Collision-Free Leaderless Formation Control of Multiple AUVs via Event-Triggered Control. Ocean Eng. 2023, 268, 113605. [Google Scholar] [CrossRef]
- Wen, L.; Yu, S.; Zhao, Y.; Yan, Y. Adaptive Dynamic Event-Triggered Consensus Control of Multiple Autonomous Underwater Vehicles. Int. J. Control 2023, 96, 746–756. [Google Scholar] [CrossRef]
- Nuño, E.; Loría, A.; Panteley, E. Leaderless Consensus Formation Control of Cooperative Multi-Agent Vehicles without Velocity Measurements. IEEE Control Syst. Lett. 2021, 6, 902–907. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, X.; Luo, G.; Liu, G. A Formation Control Method for AUV Group under Communication Delay. Front. Bioeng. Biotechnol. 2022, 10, 848641. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Xu, Z.; Yang, S.X. Consensus Formation Tracking for Multiple AUV Systems Using Distributed Bioinspired Sliding Mode Control. IEEE Trans. Intell. Veh. 2022, 8, 1081–1092. [Google Scholar] [CrossRef]
- Pang, W.; Zhu, D.; Sun, C. Multi-AUV Formation Reconfiguration Obstacle Avoidance Algorithm Based on Affine Transformation and Improved Artificial Potential Field Under Ocean Currents Disturbance. IEEE Trans. Autom. Sci. Eng. 2023, 21, 1469–1487. [Google Scholar] [CrossRef]
- Wang, X.; Fan, X.; Shi, P.; Ni, J.; Zhou, Z. An Overview of Key SLAM Technologies for Underwater Scenes. Remote Sens. 2023, 15, 2496. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, S.; An, D.; Liu, J.; Wang, H.; Feng, Y.; Li, D.; Zhao, R. Visual SLAM for Underwater Vehicles: A Survey. Comput. Sci. Rev. 2022, 46, 100510. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Li, X.; Tan, Y.; Tang, J.; Chen, X. Task-Driven Formation of Nonholonomic Vehicles With Communication Constraints. IEEE Trans. Control Syst. Technol. 2022, 31, 442–450. [Google Scholar] [CrossRef]
- Feng, J.; Yao, Y.; Wang, H.; Jin, H. Multi-AUV Terminal Guidance Method Based on Underwater Visual Positioning. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; IEEE: New York, NY, USA, 2020; pp. 314–319. [Google Scholar]
- Zhang, S.; Li, Z.; Wang, X. Robust H2 Consensus for Multi-Agent Systems With Parametric Uncertainties. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2473–2477. [Google Scholar] [CrossRef]
- Wang, G.; Wang, C.; Ding, Z.; Ji, Y. Distributed Consensus of Nonlinear Multi-Agent Systems With Mismatched Uncertainties and Unknown High-Frequency Gains. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 938–942. [Google Scholar] [CrossRef]
- Long, J.; Wang, W.; Huang, J.; Lü, J.; Liu, K. Adaptive Leaderless Consensus for Uncertain High-Order Nonlinear Multiagent Systems with Event-Triggered Communication. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7101–7111. [Google Scholar] [CrossRef]
- Mei, J.; Tian, K.; Ma, G. Scaled Position Consensus of High-Order Uncertain Multiagent Systems Over Switching Directed Graphs. IEEE Trans. Cybern. 2023, 54, 3093–3104. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Li, Z.; Wu, W.; Yang, Y. A Bilevel Task Allocation Method for Heterogeneous Multi-UUV Recovery System. Ocean Eng. 2023, 274, 114057. [Google Scholar] [CrossRef]
- Tian, K.; Mei, J. Consensus of Uncertain Heterogeneous Multi-Agent Systems Under a Directed Graph. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; IEEE: New York, NY, USA, 2020; pp. 6822–6826. [Google Scholar]
- Li, Z.; Zhang, W.; Zhang, Y.; Wu, W. Coordinated Control Strategies for Heterogeneous Multi-UUV Recovery System in Low-Visibility Underwater Implicit Interaction Scenarios. Ocean Eng. 2024, 297, 117076. [Google Scholar] [CrossRef]
- Tian, C.; Tian, K.; Mei, J.; Ma, G. Bipartite Leaderless Position Consensus of Heterogeneous Uncertain Multi-Agent Systems under Switching Directed Graphs. Syst. Control Lett. 2023, 181, 105628. [Google Scholar] [CrossRef]
- Amirkhani, A.; Barshooi, A.H. Consensus in Multi-Agent Systems: A Review. Artif. Intell. Rev. 2022, 55, 3897–3935. [Google Scholar] [CrossRef]
- Schenato, L.; Gamba, G. A Distributed Consensus Protocol for Clock Synchronization in Wireless Sensor Network. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; IEEE: New York, NY, USA, 2007; pp. 2289–2294. [Google Scholar]
- Ismail, Z.H.; Sariff, N.; Hurtado, E. A Survey and Analysis of Cooperative Multi-Agent Robot Systems: Challenges and Directions. Appl. Mob. Robot. 2018, 5, 8–14. [Google Scholar]
- Wang, D.; Wang, Z.; Wang, Z.; Wang, W. Design of Hybrid Event-Triggered Containment Controllers for Homogeneous and Heterogeneous Multiagent Systems. IEEE Trans. Cybern. 2020, 51, 4885–4896. [Google Scholar] [CrossRef] [PubMed]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A Survey and Analysis of Multi-Robot Coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, C.; Su, H.; Zhang, K. Echo State Network-Based Decentralized Control of Continuous-Time Nonlinear Large-Scale Interconnected Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6293–6303. [Google Scholar] [CrossRef]
- Xin, B.; Zhang, J.; Chen, J.; Wang, Q.; Qu, Y. Overview of Research on Transformation of Multi-AUV Formations. Complex Syst. Model. Simul. 2021, 1, 1–14. [Google Scholar] [CrossRef]
- Schmickl, T.; Thenius, R.; Moslinger, C.; Timmis, J.; Tyrrell, A.; Read, M.; Hilder, J.; Halloy, J.; Campo, A.; Stefanini, C.; et al. CoCoRo—The Self-Aware Underwater Swarm. In Proceedings of the 2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops, Ann Arbor, MI, USA, 3–7 October 2011; pp. 120–126. [Google Scholar]
- Dorigo, M.; Floreano, D.; Gambardella, L.M.; Mondada, F.; Nolfi, S.; Baaboura, T.; Birattari, M.; Bonani, M.; Brambilla, M.; Brutschy, A. Swarmanoid: A Novel Concept for the Study of Heterogeneous Robotic Swarms. IEEE Robot. Autom. Mag. 2013, 20, 60–71. [Google Scholar] [CrossRef]
- Li, S.; Batra, R.; Brown, D.; Chang, H.-D.; Ranganathan, N.; Hoberman, C.; Rus, D.; Lipson, H. Particle Robotics Based on Statistical Mechanics of Loosely Coupled Components. Nature 2019, 567, 361–365. [Google Scholar] [CrossRef] [PubMed]
- Slavkov, I.; Carrillo-Zapata, D.; Carranza, N.; Diego, X.; Jansson, F.; Kaandorp, J.; Hauert, S.; Sharpe, J. Morphogenesis in Robot Swarms. Sci. Robot. 2018, 3, eaau9178. [Google Scholar] [CrossRef] [PubMed]
- Meng, C.; Mo, T.; Zhang, X. Distributed Fixed-Time Dynamic Event-Triggered Leaderless Formation Control for Multiple AUVs Based on FRBFDO. Ocean Eng. 2024, 307, 118241. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. A Review of the Path Planning and Formation Control for Multiple Autonomous Underwater Vehicles. J. Intell. Robot. Syst. 2021, 101, 67. [Google Scholar] [CrossRef]
- Mazare, M. Distributed Adaptive Fault Tolerant Formation Control for Multiple Underwater Vehicles: Free-Will Arbitrary Time Approach. Ocean Eng. 2023, 286, 115601. [Google Scholar] [CrossRef]
- Wang, J.; Dong, H.; Chen, F.; Vu, M.T.; Shakibjoo, A.D.; Mohammadzadeh, A. Formation Control of Non-Holonomic Mobile Robots: Predictive Data-Driven Fuzzy Compensator. Mathematics 2023, 11, 1804. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, D.; Pang, W.; Zhang, Y. A Survey of Underwater Search for Multi-Target Using Multi-AUV: Task Allocation, Path Planning, and Formation Control. Ocean Eng. 2023, 278, 114393. [Google Scholar] [CrossRef]
- Van, M.; Sun, Y.; Mcllvanna, S.; Nguyen, M.-N.; Zocco, F.; Liu, Z. Control of Multiple AUV Systems with Input Saturations Using Distributed Fixed-Time Consensus Fuzzy Control. IEEE Trans. Fuzzy Syst. 2024, 32, 3142–3153. [Google Scholar] [CrossRef]
- Zheping, Y.; Yibo, L.; Jiajia, Z.; Haomiao, Y. Coordinate Control of Multi-UUVs Formation under Double Independent Topologies with Time-Vary Delays. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; IEEE: New York, NY, USA, 2017; pp. 7202–7207. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of Groups of Mobile Autonomous Agents Using Nearest Neighbor Rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 1-119-99149-8. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: Berlin/Heidelberg, Germany, 2008; Volume 27. [Google Scholar]
- Wolfowitz, J. Products of Indecomposable, Aperiodic, Stochastic Matrices. Proc. Am. Math. Soc. 1963, 14, 733–737. [Google Scholar] [CrossRef]
- Park, J.-Y.; Jun, B.; Lee, P.; Oh, J. Experiments on Vision Guided Docking of an Autonomous Underwater Vehicle Using One Camera. Ocean Eng. 2009, 36, 48–61. [Google Scholar] [CrossRef]
- Bao, J.; Li, D.; Qiao, X.; Rauschenbach, T. Integrated Navigation for Autonomous Underwater Vehicles in Aquaculture: A Review. Inf. Process. Agric. 2020, 7, 139–151. [Google Scholar] [CrossRef]
- Tian, Y.-P.; Zhang, Y. High-Order Consensus of Heterogeneous Multi-Agent Systems with Unknown Communication Delays. Automatica 2012, 48, 1205–1212. [Google Scholar] [CrossRef]
- Jost, J.; Jost, J. Riemannian Geometry and Geometric Analysis; Springer: Berlin/Heidelberg, Germany, 2008; Volume 42005. [Google Scholar]
- Yan, Z.; Wu, Y.; Liu, Y.; Ren, H.; Du, X. Leader-Following Multiple Unmanned Underwater Vehicles Consensus Control under the Fixed and Switching Topologies with Unmeasurable Disturbances. Complexity 2020, 2020, 5891459. [Google Scholar] [CrossRef]
- Mei, J. Model Reference Adaptive Consensus for Uncertain Multi-Agent Systems under Directed Graphs. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; IEEE: New York, NY, USA, 2018; pp. 6198–6203. [Google Scholar]
- Li, Y.; Jiang, Y.; Cao, J.; Wang, B.; Li, Y. AUV Docking Experiments Based on Vision Positioning Using Two Cameras. Ocean Eng. 2015, 110, 163–173. [Google Scholar] [CrossRef]
- Almeida, J.; Silvestre, C.; Pascoal, A. Cooperative Control of Multiple Surface Vessels in the Presence of Ocean Currents and Parametric Model Uncertainty. Int. J. Robust Nonlinear 2010, 20, 1549–1565. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).