
Vessel Trajectory Prediction for Enhanced Maritime Navigation Safety: A Novel Hybrid Methodology


Abstract
1. Introduction
- (1)
- A novel hybrid vessel trajectory prediction method integrating GAT and LSTM is proposed to balance the extraction of spatial and temporal features effectively. More importantly, it provides a more comprehensive consideration of the vessel movement spatial relationship compared to traditional methods.
- (2)
- Given the particular attention to nodes that significantly impact the navigational behavior of the target vessel, a refined approach for modelling vessel interactions by dynamically assigning different learning weights to neighboring nodes based on their distances from the target vessel is introduced in this research. The application of such an approach could not only reflect real-world scenarios more accurately, but also enhance the prediction performance of the proposed model.
- (3)
- Through the empirical analysis using real AIS data, the proposed method is proven to surpass other baseline methods in terms of prediction accuracy and robustness, demonstrating the reliability and the superiority of this hybrid methodology.
2. Review of Related Works
2.1. Vessel Trajectory Prediction Based on Physical Models
2.2. Vessel Trajectory Prediction Based on Statistics and Machine Learning
2.3. Vessel Trajectory Prediction Based on Deep Learning
3. Methodology
3.1. Problem Description
3.2. Model Architecture
3.2.1. Graph Attention Network
- (1)
- Dynamic Learning of Neighboring Node Importance
- (2)
- Suitability for Complex and Dynamic Topologies
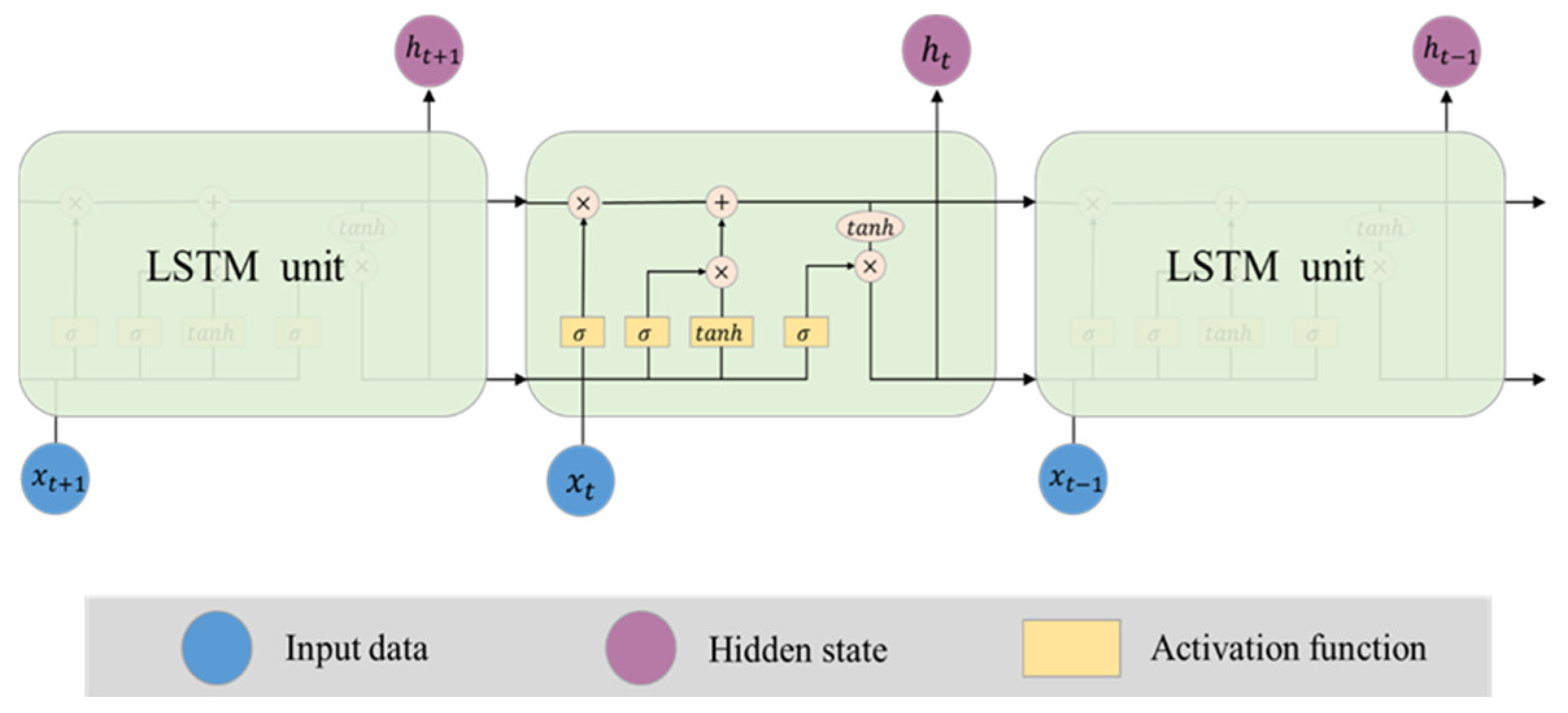
3.2.2. Long Short-Term Memory
- (1)
- CNN extracts local features from sequence data through convolutional operations, performing well in short-term dependencies but struggling to capture long-term dependencies.
- (2)
- RNN processes sequential data through recurrent structures, but it is prone to gradient vanishing or exploding problems on long sequences, making it difficult to capture long-term dependencies.
- (3)
- LSTM is a special type of RNN designed to address the issues of vanishing or exploding gradients encountered by standard RNNs when processing long sequence data [28].
4. Empirical Study
4.1. Data Collection and Preprocessing
4.2. Baseline Methods and Evaluation Criteria
4.3. Parameter Setting and Implementation Detail
4.4. Experimaental Results and Analysis
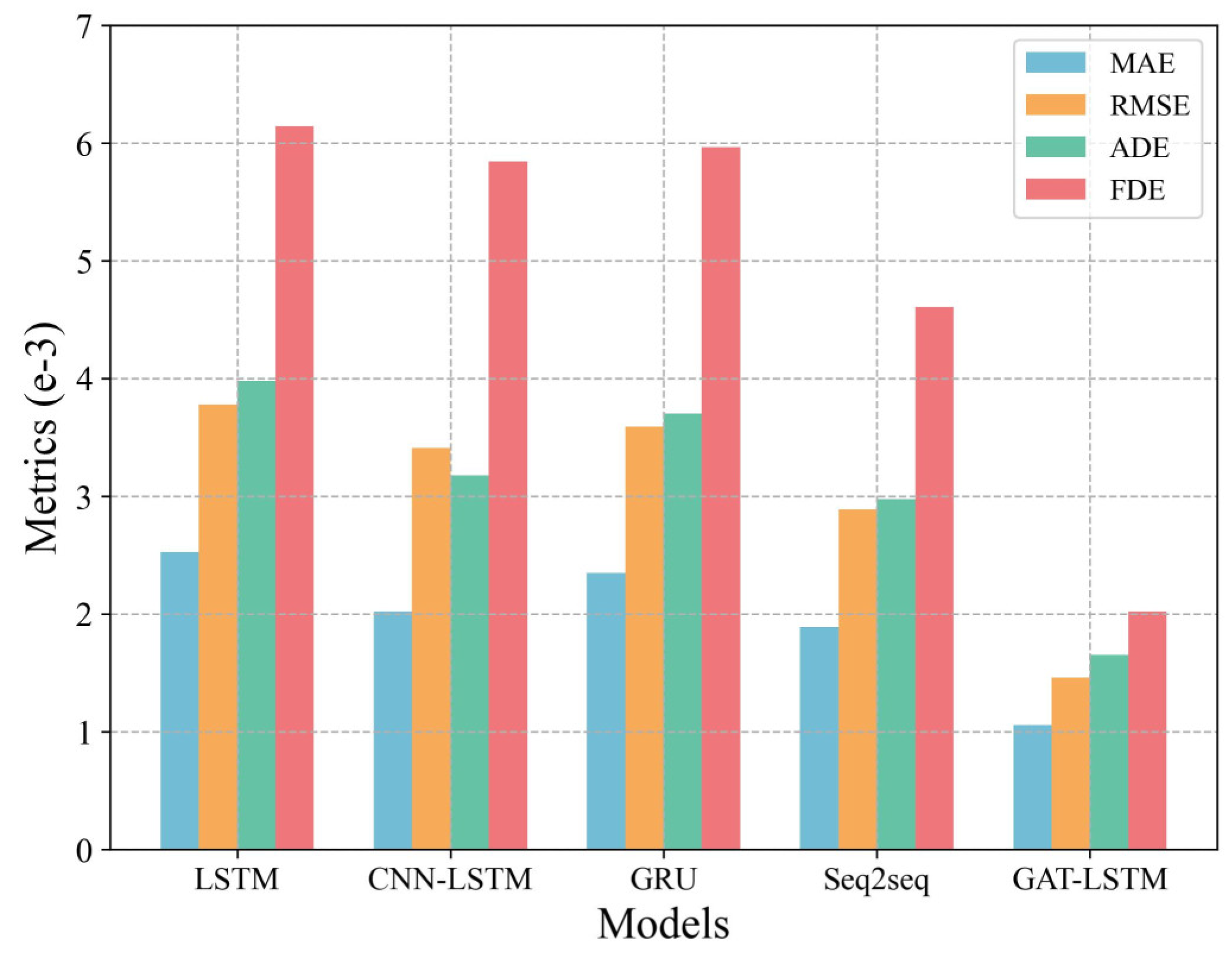
- (1)
- The LSTM and GRU models perform poorly compared to other comparative models, with their predictions exhibiting significant deviations for most segments and only aligning with the actual values of certain trajectory segments.
- (2)
- The prediction results of the CNN-LSTM and Seq2seq models are roughly similar, and both models show a relatively good prediction performance in most trajectory segments. However, in some cases, although they can provide satisfactory results in the early stages of trajectory prediction, the accuracy of the prediction gradually decreases over time. This phenomenon may be due to the difficulty of these models in capturing small changes and complex details in trajectories when dealing with highly dynamic scenes.
- (3)
- The predicted trajectory of the GAT-LSTM model is closest to the real trajectory. This is probably because the model combines the capabilities of spatial relationships and time-series prediction, and can capture complex interactions between ships through a graph attention mechanism. When vessels perform complex actions, such as turning, it can also understand the nonlinearity of the vessel behavior well, demonstrating the accuracy and robustness of the model.
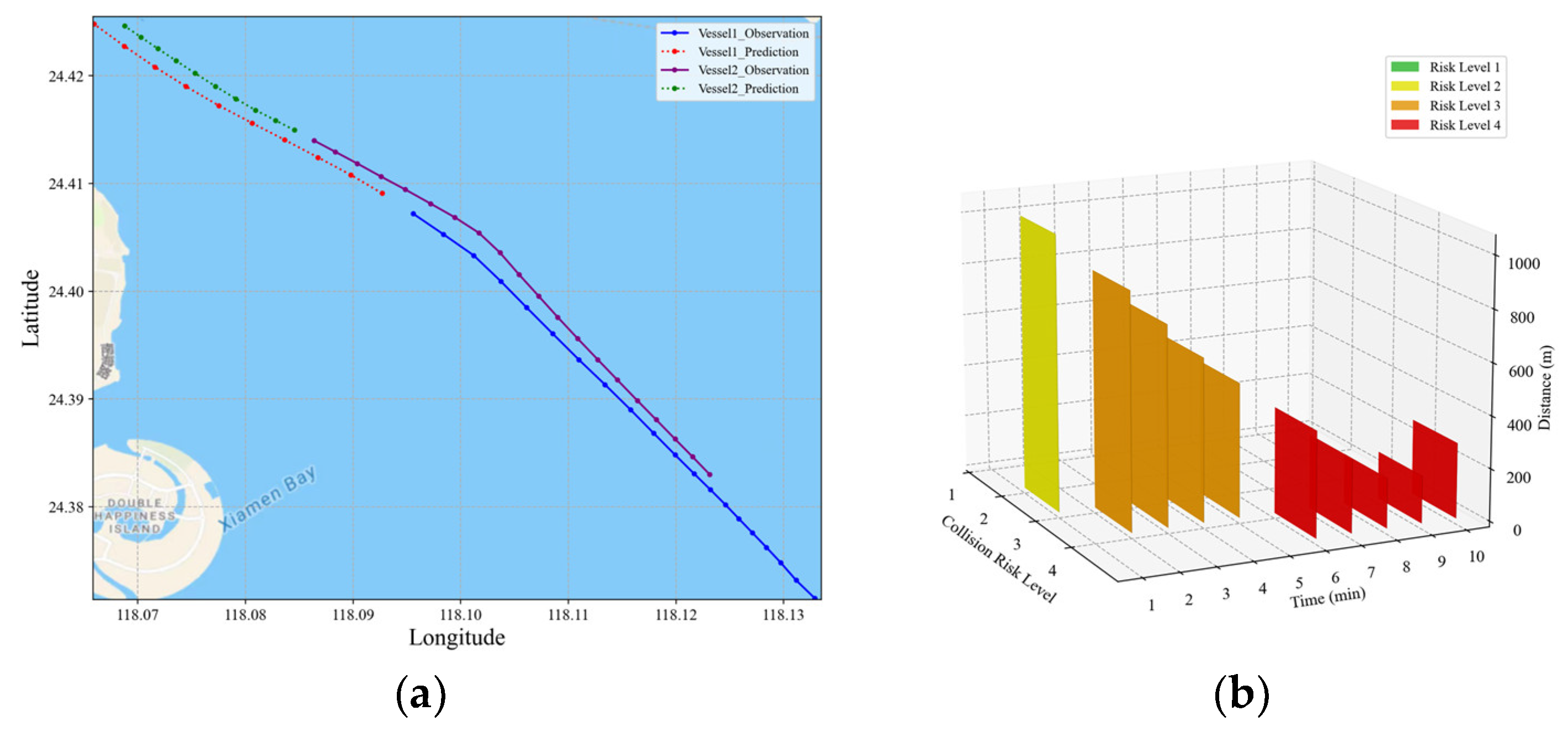
4.5. Practical Implication
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.S.; Wan, C.P.; Yang, Z.L.; Yin, J.B.; Yu, Q. A machine learning-based Bayesian model for predicting the duration of ship detention in PSC inspection. Transp. Res. Part E Logist. Transp. Rev. 2023, 180, 103331. [Google Scholar] [CrossRef]
- Chen, X.; Wu, H.; Han, B.; Liu, W.; Montewka, J.; Liu, W. Orientation-aware ship detection via a rotation feature decoupling supported deep learning approach. Ocean Eng. 2023, 125, 106686. [Google Scholar] [CrossRef]
- UNCTAD. Review of Maritime Transport 2023; United Nations Publications: New York, NY, USA, 2024. [Google Scholar]
- Yu, Q.; Teixeira, A.; Liu, K.; Rong, H.; Soares, C. An integrated dynamic ship risk model based on Bayesian Networks and Evidential Reasoning. Reliab. Eng. Syst. Saf. 2021, 216, 107993. [Google Scholar] [CrossRef]
- Kaptan, M.; Uğurlu, Ö.; Wang, J. The effect of nonconformities encountered in the use of technology on the occurrence of collision, contact and grounding accidents. Reliab. Eng. Syst. Saf. 2021, 215, 107886. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, H.; Guo, Y. Toward Multimodal Vessel Trajectory Prediction by modeling the distribution of modes. Ocean Eng. 2023, 282, 115020. [Google Scholar] [CrossRef]
- Chen, X.Q.; Dou, S.T.; Song, T.Q.; Wu, H.F.; Sun, Y.; Xian, J.F. Spatial-Temporal Ship Pollution Distribution Exploitation and Harbor Environmental Impact Analysis via Large-Scale AIS Data. J. Mar. Sci. Eng. 2024, 12, 960. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, J.; Gong, P.; Chen, C.; Han, B.; Wu, Z. Trajectory prediction of seagoing ships in dynamic traffic scenes via a gated spatio-temporal graph aggregation network. Ocean Eng. 2023, 287, 115886. [Google Scholar] [CrossRef]
- Tong, X.; Chen, X.; Sang, L.; Mao, Z.; Wu, Q. Vessel trajectory prediction in curving channel of inland river. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 25–28 June 2015; pp. 706–714. [Google Scholar] [CrossRef]
- Gutierrez, L.A.; Kun, J.I.N.; Gutierrez, L.A. Trajectory Prediction Algorithm Based on Gaussian Mixture Model. J. Softw. 2015, 26, 1048–1063. [Google Scholar] [CrossRef]
- Cheng, Q.; Wang, C. A Method of Trajectory Prediction Based on Kalman Filtering Algorithm and Support Vector Machine Algorithm. In Proceedings of 2017 Chinese Intelligent Systems Conference: Volume I; Springer: Singapore, 2018. [Google Scholar]
- Chen, P.; Yang, F.; Mou, J.; Chen, L.; Li, M. Regional ship behavior and trajectory prediction for maritime traffic management: A social generative adversarial network approach. Ocean Eng. 2024, 299, 117186. [Google Scholar] [CrossRef]
- Jaskólski, K. Automatic Identification System (AIS) Dynamic Data Estimation Based on Discrete Kalman Filter (KF) Algorithm. Sci. J. Pol. Nav. Acad. 2017, 211, 71–87. [Google Scholar] [CrossRef]
- Fossen, S.; Fossen, T.I. Extended kalman filter design and motion prediction of ships using live automatic identification system (AIS) Data. In Proceedings of the 2018 2nd European Conference on Electrical Engineering and Computer Science (EECS), Bern, Switzerland, 20–22 December 2018; pp. 464–470. [Google Scholar] [CrossRef]
- Mazzarella, F.; Arguedas, V.F.; Vespe, M. Knowledge-based vessel position prediction using historical AIS data. In Proceedings of the 2015 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 6–8 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Zhou, T.; Jiang, D.; Lin, Z.; Han, G.; Xu, X.; Qin, J. Hybrid dual Kalman filtering model for short-term traffic flow forecasting. IET Intell. Transp. Syst. 2019, 13, 1023–1032. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, G.; Hu, C.; Ma, X. Wavelet analysis based hidden markov model for large ship trajectory prediction. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 2913–2918. [Google Scholar] [CrossRef]
- Cheng, Y.; Qiao, Y.; Yang, J. An improved Markov method for prediction of user mobility. In Proceedings of the 2016 12th International Conference on Network and Service Management (CNSM), Montreal, QC, Canada, 31 October–4 November 2016; pp. 394–399. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. A data-driven approach to vessel trajectory prediction for safe autonomous ship operations. In Proceedings of the 2018 Thirteenth International Conference on Digital Information Management (ICDIM), Berlin, Germany, 24–26 September 2018; pp. 240–247. [Google Scholar] [CrossRef]
- Dalsnes, B.R.; Hexeberg, S.; Flåten, A.L.; Eriksen, B.O.H.; Brekke, E.F. The Neighbor Course Distribution Method with Gaussian Mixture Models for AIS-Based Vessel Trajectory Prediction. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 580–587. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.P.; Guedes Soares, C. Ship trajectory uncertainty prediction based on a Gaussian Process model. Ocean Eng. 2019, 182, 499–511. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. An ais-based multiple trajectory prediction approach for collision avoidance in future vessels. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019. [Google Scholar] [CrossRef]
- Liu, J.; Shi, G.; Zhu, K. Vessel trajectory prediction model based on ais sensor data and adaptive chaos differential evolution support vector regression (ACDE-SVR). Appl. Sci. 2019, 9, 2983. [Google Scholar] [CrossRef]
- Zhang, C.; Bin, J.; Wang, W.; Peng, X.; Wang, R.; Halldearn, R.; Liu, Z. AIS data driven general vessel destination prediction: A random forest based approach. Transp. Res. Part C Emerg. Technol. 2020, 118, 102729. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Le Van, C.; Ali, M.I. Demo: Vessel trajectory prediction using sequence-to-sequence models over spatial grid. In Proceedings of the DEBS’18: Proceedings of the 12th ACM International Conference on Distributed and Event-Based Systems, Hamilton, New Zealand, 25–29 June 2018; pp. 258–261. [Google Scholar] [CrossRef]
- Capobianco, S.; Millefiori, L.M.; Forti, N.; Braca, P.; Willett, P. Deep Learning Methods for Vessel Trajectory Prediction Based on Recurrent Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4329–4346. [Google Scholar] [CrossRef]
- Zhang, Z.; Ni, G.; Xu, Y. Ship Trajectory Prediction based on LSTM Neural Network. In Proceedings of the 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020; pp. 1356–1364. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Prediction of Vessel Trajectories from Ais Data via Sequence-to-Sequence Recurrent Neural Networks. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 8931–8935. [Google Scholar]
- Suo, Y.; Chen, W.; Claramunt, C.; Yang, S. A ship trajectory prediction framework based on a recurrent neural network. Sensors 2020, 20, 5133. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y.; Jiang, R.; Du, Y.; Lu, Q. TPR-DTVN: A Routing Algorithm in Delay Tolerant Vessel Network Based on Long-Term Trajectory Prediction. Wirel. Commun. Mob. Comput. 2021, 2021, 6630265. [Google Scholar] [CrossRef]
- Ghaffarian, S.; Valente, J.; Van Der Voort, M.; Tekinerdogan, B. Effect of attention mechanism in deep learning-based remote sensing image processing: A systematic literature review. Remote Sens. 2021, 13, 2965. [Google Scholar] [CrossRef]
- Jia, H.; Yang, Y.; An, J.; Fu, R. A Ship Trajectory Prediction Model Based on Attention-BILSTM Optimized by the Whale Optimization Algorithm. Appl. Sci. 2023, 13, 4907. [Google Scholar] [CrossRef]
- Zhang, T.; Zheng, X.Q.; Liu, M.X. Multiscale attention-based LSTM for ship motion prediction. Ocean Eng. 2021, 230, 109066. [Google Scholar] [CrossRef]
- Zhao, L.; Zuo, Y.; Li, T.; Chen, C.L.P. Application of an Encoder–Decoder Model with Attention Mechanism for Trajectory Prediction Based on AIS Data: Case Studies from the Yangtze River of China and the Eastern Coast of the U.S. J. Mar. Sci. Eng. 2023, 11, 1530. [Google Scholar] [CrossRef]
- Zhang, X.; Fu, X.; Xiao, Z.; Xu, H.; Qin, Z. Vessel Trajectory Prediction in Maritime Transportation: Current Approaches and beyond. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19980–19998. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Zhang, Z.; Xing, H. Big data driven vessel trajectory prediction based on sparse multi-graph convolutional hybrid network with spatio-temporal awareness. Ocean Eng. 2023, 287, 115695. [Google Scholar] [CrossRef]
- Feng, H.; Cao, G.; Xu, H.; Ge, S.S. IS-STGCNN: An Improved Social spatial-temporal graph convolutional neural network for ship trajectory prediction. Ocean Eng. 2022, 266, 112960. [Google Scholar] [CrossRef]
- Liu, R.W.; Zheng, W.; Liang, M. Spatio-temporal multi-graph transformer network for joint prediction of multiple vessel trajectories. Eng. Appl. Artif. Intell. 2024, 129, 107625. [Google Scholar] [CrossRef]
- Liu, R.W.; Liang, M.; Nie, J.; Yuan, Y.; Xiong, Z.; Yu, H.; Guizani, N. STMGCN: Mobile Edge Computing-Empowered Vessel Trajectory Prediction Using Spatio-Temporal Multigraph Convolutional Network. IEEE Trans. Ind. Inform. 2022, 18, 7977–7987. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, Z.; Zhou, Z.Z.; Chen, X.; Wu, B.; Wang, S. A ship trajectory prediction method based on GAT and LSTM. Ocean Eng. 2023, 289, 116159. [Google Scholar] [CrossRef]
- Li, H.; Jiao, H.; Yang, Z. Ship trajectory prediction based on machine learning and deep learning: A systematic review and methods analysis. Eng. Appl. Artif. Intell. 2023, 126, 107062. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Xing, H.; Zhang, Z. Vessel trajectory prediction based on spatio-temporal graph convolutional network for complex and crowded sea areas. Ocean Eng. 2024, 298, 117232. [Google Scholar] [CrossRef]
- Xia, Z.; Zhang, Y.; Yang, J.; Xie, L. Dynamic spatial–temporal graph convolutional recurrent networks for traffic flow forecasting. Expert Syst. Appl. 2024, 240, 122381. [Google Scholar] [CrossRef]
- Liu, W.; Cao, Y.; Guan, M.; Liu, L. Research on Ship Trajectory Prediction Method based on CNN-RGRU-Attention Fusion Model. IEEE Access. 2024, 12, 63950–63957. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, D.J. Collision evasive action timing for MASS using CNN–LSTM-based ship trajectory prediction in restricted area. Ocean Eng. 2024, 294, 116766. [Google Scholar] [CrossRef]
- Adege, A.B.; Lin, H.P.; Wang, L.C. Mobility Predictions for IoT Devices Using Gated Recurrent Unit Network. IEEE Internet Things J. 2020, 7, 505–517. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, Z.; Chen, H.; Zhang, Z.; Wang, J.; Yuan, Z.; Jin, Y.; Wu, X. EA-VTP: Environment-Aware Long-Term Vessel Trajectory Prediction. In Proceedings of the 2022 International Joint Conference on Neural Networks (IJCNN), Padua, Italy, 18–23 July 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Li, J.; Yang, L.; Chen, Y.; Jin, Y. MFAN: Mixing Feature Attention Network for trajectory prediction. Pattern Recognit. 2024, 146, 109997. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J.L. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015; pp. 1–15. [Google Scholar]
- Li, H.; Jiao, H.; Yang, Z. AIS data-driven ship trajectory prediction modelling and analysis based on machine learning and deep learning methods. Transp. Res. Part E Logist. Transp. Rev. 2023, 175, 103152. [Google Scholar] [CrossRef]
- Liu, R.W.; Liang, M.; Nie, J.; Lim, W.Y.B.; Zhang, Y.; Guizani, M. Deep Learning-Powered Vessel Trajectory Prediction for Improving Smart Traffic Services in Maritime Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3080–3094. [Google Scholar] [CrossRef]
- Shin, Y.; Kim, N.; Lee, H.; In, S.Y.; Hansen, M.; Yoon, Y. Deep learning framework for vessel trajectory prediction using auxiliary tasks and convolutional networks. Eng. Appl. Artif. Intell. 2024, 132, 107936. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Models | ||||
|---|---|---|---|---|---|
| LSTM | CNN-LSTM | GRU | Seq2seq | GAT-LSTM | |
| MAE | 2.526 10−3 | 2.021 10−3 | 2.350 10−3 | 1.890 10−3 | 1.057 10−3 |
| RMSE | 3.778 10−3 | 3.411 10−3 | 3.592 10−3 | 2.891 10−3 | 1.461 10−3 |
| ADE | 3.978 10−3 | 3.175 10−3 | 3.704 10−3 | 2.974 10−3 | 1.650 10−3 |
| FDE | 6.143 10−3 | 5.844 10−3 | 5.963 10−3 | 4.607 10−3 | 2.018 10−3 |
| MMSI of Vessel 1 (Own Vessel) | Vessel Type | MMSI of Vessel 2 (Target Vessel) | Vessel Type | |
|---|---|---|---|---|
| Head-on | 351297000 | Container vessel | 412473290 | Container vessel |
| Overtaking | 477958800 | Container vessel | 538006763 | tanker |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yu, Q.; Yang, Z. Vessel Trajectory Prediction for Enhanced Maritime Navigation Safety: A Novel Hybrid Methodology. J. Mar. Sci. Eng. 2024, 12, 1351. https://doi.org/10.3390/jmse12081351
Li Y, Yu Q, Yang Z. Vessel Trajectory Prediction for Enhanced Maritime Navigation Safety: A Novel Hybrid Methodology. Journal of Marine Science and Engineering. 2024; 12(8):1351. https://doi.org/10.3390/jmse12081351
Chicago/Turabian StyleLi, Yuhao, Qing Yu, and Zhisen Yang. 2024. "Vessel Trajectory Prediction for Enhanced Maritime Navigation Safety: A Novel Hybrid Methodology" Journal of Marine Science and Engineering 12, no. 8: 1351. https://doi.org/10.3390/jmse12081351
APA StyleLi, Y., Yu, Q., & Yang, Z. (2024). Vessel Trajectory Prediction for Enhanced Maritime Navigation Safety: A Novel Hybrid Methodology. Journal of Marine Science and Engineering, 12(8), 1351. https://doi.org/10.3390/jmse12081351