

Full Coverage Path Planning for Torpedo-Type AUVs’ Marine Survey Confined in Convex Polygon Area

Abstract
:1. Introduction
2. Problem Statement
- SP1.
- Full coverage path with the minimum turn numbers.
- SP2.
- The whole path is strictly located inside the search area with none of overlapped or crossed path lines. Moreover, the total length of the path should be as short as possible.
- SP3.
- The vehicle is allowed to have nonzero turning radius.
3. Proposed Method
3.1. Overview
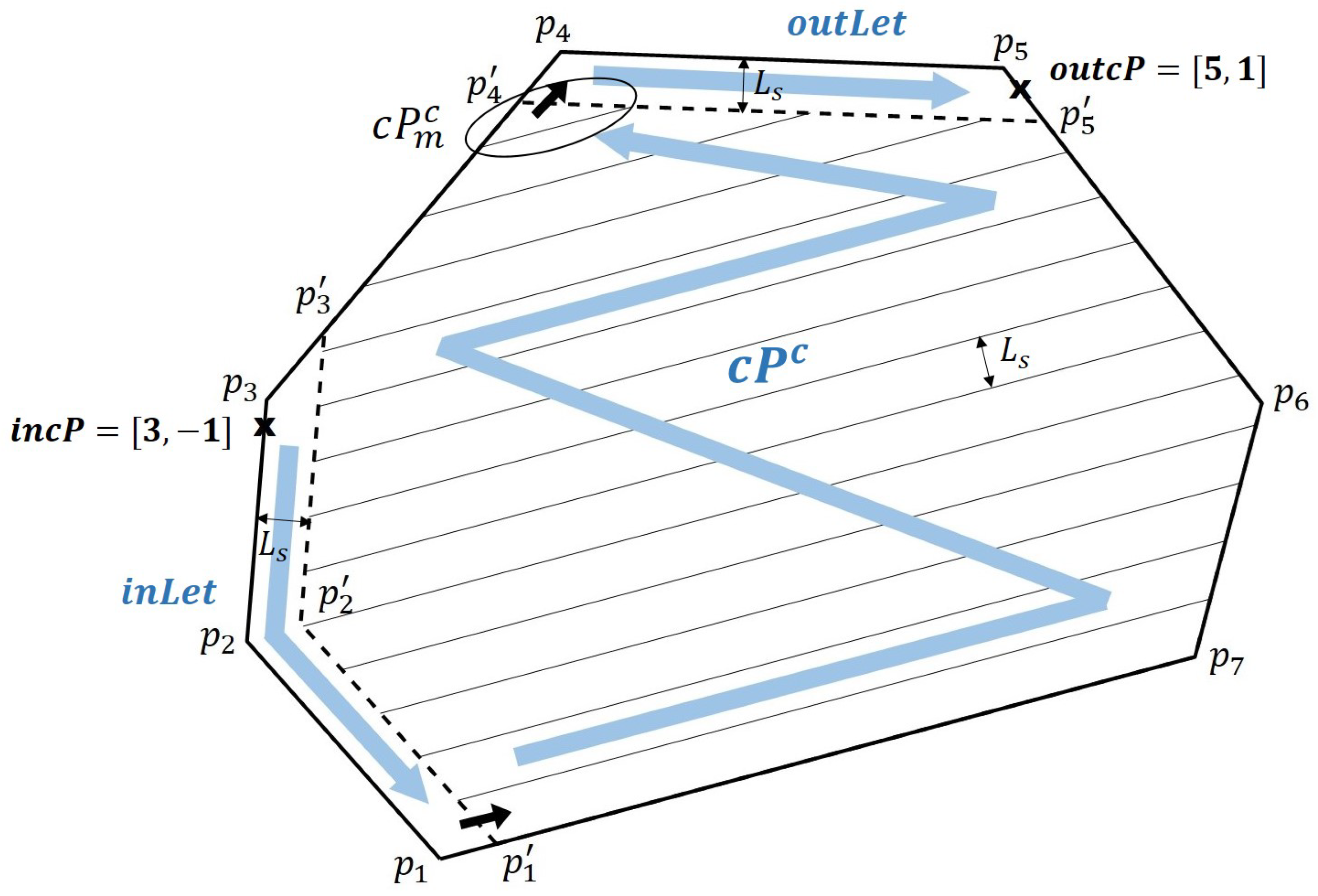
- To solve SP1 for any given , the idea in this paper is simple that we pile the inter-tracks alongside a specific edge of so that we can cover with the minimum number of these inter-tracks.
- Apply CbSPSA to solve the SP2.
- Also, apply a method similar to CbSPSA combined with the circle whose radius is to round the path at each waypoint (solving SP3).
- Upgrade and more detailed description of Algorithm 2.
- Upgrade and detailed description of search algorithm for , see Figure 1.
3.2. Partition: Solving SP1 and Some of SP2
3.3. CbSPSA for : Solving SP2
| Algorithm 1: |
Input: , Output: 1 2 3 for 4 5 6 7 8 end for 9 return The shortest path among |
3.3.1. CbSPSA for and
3.3.2. CbSPSA for
| Algorithm 2: |
Input: , Output: 1 2 3 :=, := 4 for 5 if 6 Set with , , and 7 8 else 9 X:=last way point of 10 11 if 12 13 end if 14 end if 15 end for 16 return |
| Algorithm 3: |
Input: , Output: 1 2 case 1. , 3 4 case 2. , 5 6 case 3. , 7 8 case 4. , 9 10 end case 11 return |
3.4. Smoothing : Solving SP3
| Algorithm 4: |
Input: , Output: 1 2 for i = 2: (N − 1) 3 if 4 Calculate or as in Figure 5 5 or 6 else if 7 Calculate and according to Figure 5a 8 while(!) Increasing and calculate and according to Figure 5b 9 while(!) Increasing and calculate and according to Figure 5c 10 11 end if 12 end for 13 14 return |
4. Numerical Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CPP | Coverage path planning |
| AUV | Autonomous underwater vehicle |
| CbSPSA | Calculation based shortest path search algorithm |
| DOF | Degree of freedom |
Appendix A. Function calPoints21(x1, , stat)
Appendix B. Function calPoints22(x1, , stat)
Appendix C. Proof of Proposition A1
| 1 | This kind of redefinition of full coverage path is another main upgrade to the authors’ previous work [25]. |
| 2 | In this paper we only consider the case where there is maximum of one vertex between and . Also, maximum of one vertex between and . From the practical point of view, this is also quite a reasonable consideration. |
| 3 | Fortunately, so far the authors have not encounter the case where these two points are inside the circle at the same time. Indeed, with this in mind, the point in Figure 2(a2,b2) is set away from . |
| 4 | In this paper, we only count the vehicle turn with more than of heading change as one. |
References
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Bormann, R.; Jordan, F.; Hampp, J.; Hagele, M. Indoor Coverage Path Planning: Survey, Implementation, Analysis. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 1717–1725. [Google Scholar]
- Taua, M.C.; Lisane, B.B.; Ferreira, R.R. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Arkin, E.M.; Fekete, S.P.; Mitchell, S.B. Approximation algorithms for lawn mowing and milling. Comput. Geom. 2000, 17, 25–50. [Google Scholar] [CrossRef]
- Huang, Y.Y.; Cao, Z.L.; Oh, S.J.; Kattan, E.U.; Hall, E.L. Automatic Operation for a Robot Lawn Mower. SPIE Conf. Mob. Robot. 1987, 727. [Google Scholar] [CrossRef]
- Hofmann, M.; Clemens, J.; Stronzek-Pfeifer, D.; Simonelli, R.; Serov, A.; Schettino, S.; Runge, M.; Schill, K.; Buskens, C. Coverage Path Planning and Precise Localization for Autonomous Lawn Mowers. In Proceedings of the 6th IEEE International Conference on Robotic Computing, Naples, Italy, 5–7 December 2022; pp. 238–242. [Google Scholar]
- Vosniakos, G.; Papapanagiotou, P. Multiple tool path planning for NC machining of convex pockets without islands. Robot. Comput. Integr. Manuf. 2000, 16, 425–435. [Google Scholar] [CrossRef]
- Chen, X.; Tucker, T.T.; Kurfess, T.R.; Vuduc, R.; Hu, L. Max orientation coverage: Efficient path planning to avoid collisions in the CNC milling of 3D objects. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 6862–6869. [Google Scholar]
- Held, M. On the Computational Geometry of Pocket Maching; Lecture Notes in Computer Science; Springer: New York, NY, USA, 1991; Volume 500. [Google Scholar]
- Dhanik, S.; Xirouchakis, R. Contour parallel milling tool path generation for arbitrary pocket shape using a fast marching method. Int. J. Adv. Manuf. Technol. 2010, 50, 1101–1111. [Google Scholar] [CrossRef]
- Venkatesh, R.; Vijayan, V.; Parthiban, A.; Sathish, T.; Chandran, S.S. Comparison of different tool path pocket milling. Int. J. Mech. Eng. Technol. 2018, 9, 922–927. [Google Scholar]
- Yasutomi, F.; Yamada, M.; Tsukamoto, K. Cleaning robot control. In Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 1839–1841. [Google Scholar]
- Hofner, C.; Schmidt, G. Path planning and guidance techniques for an autonomous mobile cleaning robot. Robot. Auton. 1995, 14, 199–212. [Google Scholar] [CrossRef]
- Prassler, E.; Ritter, A.; Schaeffer, C.; Fiorini, P. A Short History of Cleaning Robots. Auton. Robot. 2000, 9, 211–226. [Google Scholar] [CrossRef]
- Miao, X.; Lee, J.; Kang, B.Y. Scalable Coverage Path Planning for Cleaning Robots Using Rectangular Map Decomposition on Large Environments. IEEE Access 2018, 6, 38200–38215. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Zhang, Y.; Schervish, M. Path Planning for Robotic Demining: Robust Sensor-based Coverage of Unstructured Environments and Probabilistic Methods. Int. J. Robot. Res. 2003, 22, 441–466. [Google Scholar] [CrossRef]
- Seder, M.; Petrovic, I. Complete coverage path planning of mobile robots for humanitarian demining. Ind. Robot. 2012, 39, 484–493. [Google Scholar]
- Stoll, A.; Kutzbach, D. Guidance of a Forage Harvester with GPS. Precis. Agric. 2000, 2, 281–291. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage Path Planning Algorithms for Agricultural Field Machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Wong, S.C.; MacDonald, B.A. A topological coverage algorithm for mobile robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 1685–1690. [Google Scholar]
- Tang, J.; Sun, C.; Zhang, X. MSTC*: Multi-robot Coverage Path Planning under Physical Constraints. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 30 May–5 June 2021; pp. 2518–2524. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. Sensor-Driven Online Coverage Planning for Autonomous Underwater Vehicles. IEEE/ASME Trans. Mechatronics 2013, 18, 1827–1838. [Google Scholar] [CrossRef]
- Sun, B.; Zhu, D.; Tian, C.; Luo, C. Complete Coverage Autonomous Underwater Vehicles Path Planning Based on Glasius Bio-Inspired Neural Network Algorithm for Discrete and Centralized Programming. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 73–84. [Google Scholar] [CrossRef]
- Yordanova, V.; Gips, B. Coverage Path Planning With Trackn Spacing Adaptation for Autonomous Underwater Vehicles. IEEE Robot. Autom. Lett. 2020, 5, 4774–4780. [Google Scholar] [CrossRef]
- Bagnitckii, A.; Inzartsev, A.; Pavin, A. Planning and correction of the AUV coverage path in real time. In Proceedings of the 2017 IEEE Underwater Technology, Busan, Republic of Korea, 21–24 February 2017. [Google Scholar] [CrossRef]
- Li, J.H.; Kang, H.; Kim, M.G.; Jin, H.; Lee, M.J.; Cho, G.R.; Bae, C. Full Coverage of Confined Irregular Polygon Area for Marine Survey. IEEE Access 2023, 11, 92200–92208. [Google Scholar] [CrossRef]
- Stefan, H.; Kurt, M. Fast triangulation of simple polygons. In Foundations of Computation Theory; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1983; Volume 158, pp. 207–218. [Google Scholar]
- Li, J.H. 3D trajectory tracking of underactuated non-minimum phase underwater vehicles. Automatica 2023, 155, 111149. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons Ltd.: Chichester, UK, 1994. [Google Scholar]
- Heckbert, P.S. Testing the Convexity of a Polygon; Academic Press: London, UK, 1994. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bytes | Values | Descriptions |
|---|---|---|
| Used to determine | ||
| Indicates the path direction. +1: → , −1: . | ||
| 1, 0 | Indicates if there is a vertex between and (clockwise). 1: yes, 0: no | |
| 1, 0 | Indicates if there is a vertex between and (clockwise). 1: yes, 0: no |
| i | |||
|---|---|---|---|
| 1 | odd | odd | |
| 1 | odd | even | |
| 1 | even | odd | |
| 1 | even | even | |
| n | odd | odd | |
| n | odd | even | |
| n | even | odd | |
| n | even | even |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.-H.; Kang, H.; Kim, M.-G.; Lee, M.-J.; Jin, H.-S. Full Coverage Path Planning for Torpedo-Type AUVs’ Marine Survey Confined in Convex Polygon Area. J. Mar. Sci. Eng. 2024, 12, 1522. https://doi.org/10.3390/jmse12091522
Li J-H, Kang H, Kim M-G, Lee M-J, Jin H-S. Full Coverage Path Planning for Torpedo-Type AUVs’ Marine Survey Confined in Convex Polygon Area. Journal of Marine Science and Engineering. 2024; 12(9):1522. https://doi.org/10.3390/jmse12091522
Chicago/Turabian StyleLi, Ji-Hong, Hyungjoo Kang, Min-Gyu Kim, Mun-Jik Lee, and Han-Sol Jin. 2024. "Full Coverage Path Planning for Torpedo-Type AUVs’ Marine Survey Confined in Convex Polygon Area" Journal of Marine Science and Engineering 12, no. 9: 1522. https://doi.org/10.3390/jmse12091522