
Three-Dimensional Path Planning of UAVs for Offshore Rescue Based on a Modified Coati Optimization Algorithm



Abstract
1. Introduction
- To address the population separation problem in the COA, a dynamic opposition-based search is introduced to solve the issue of information exchange obstacles caused by population segmentation during the predation phase.
- To address the problem of the insufficient exploitation capability of the COA, leading to difficulty in searching for the optimal path, a covariance matrix search is introduced to enhance the algorithm’s exploitation capability and improve path quality.
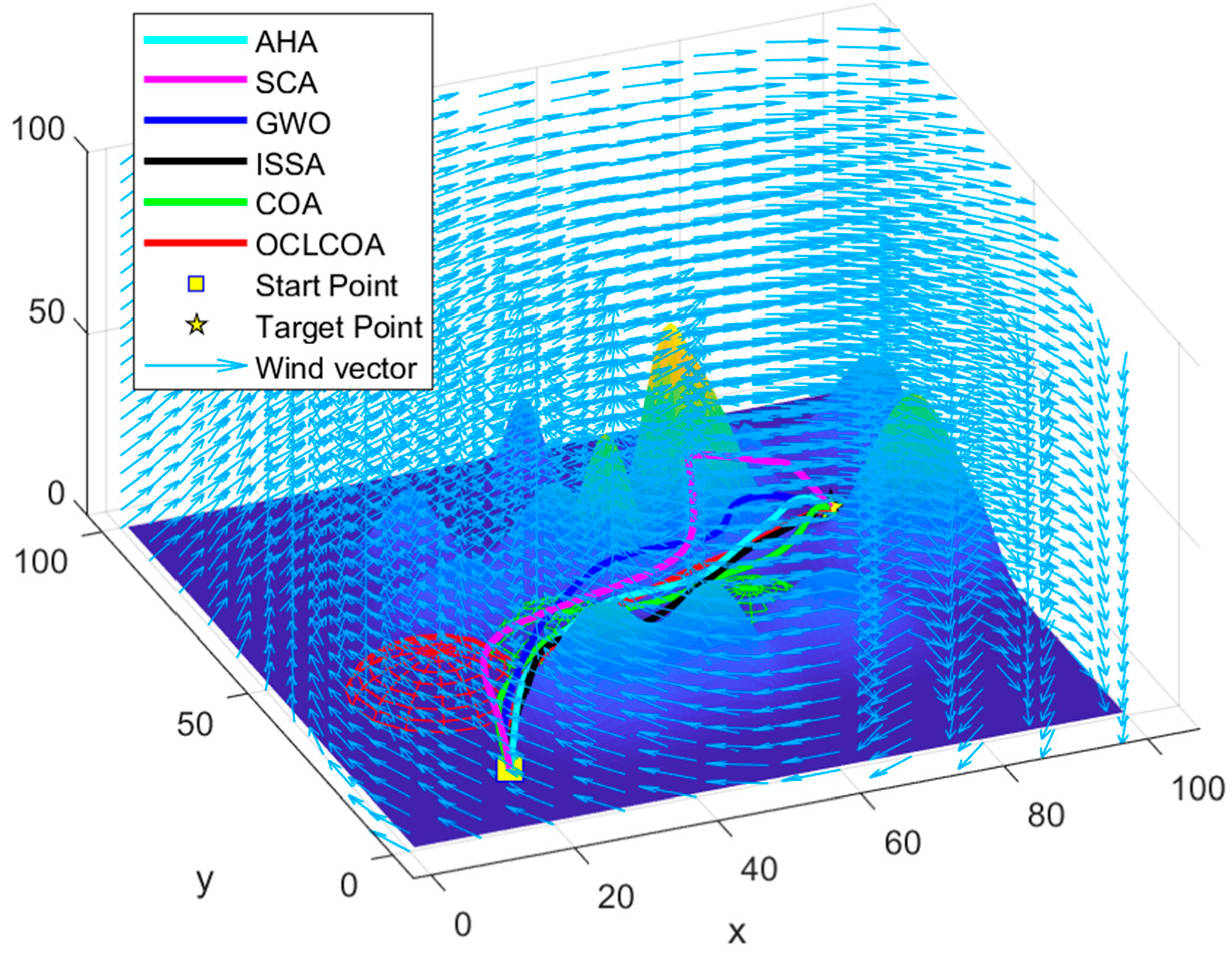
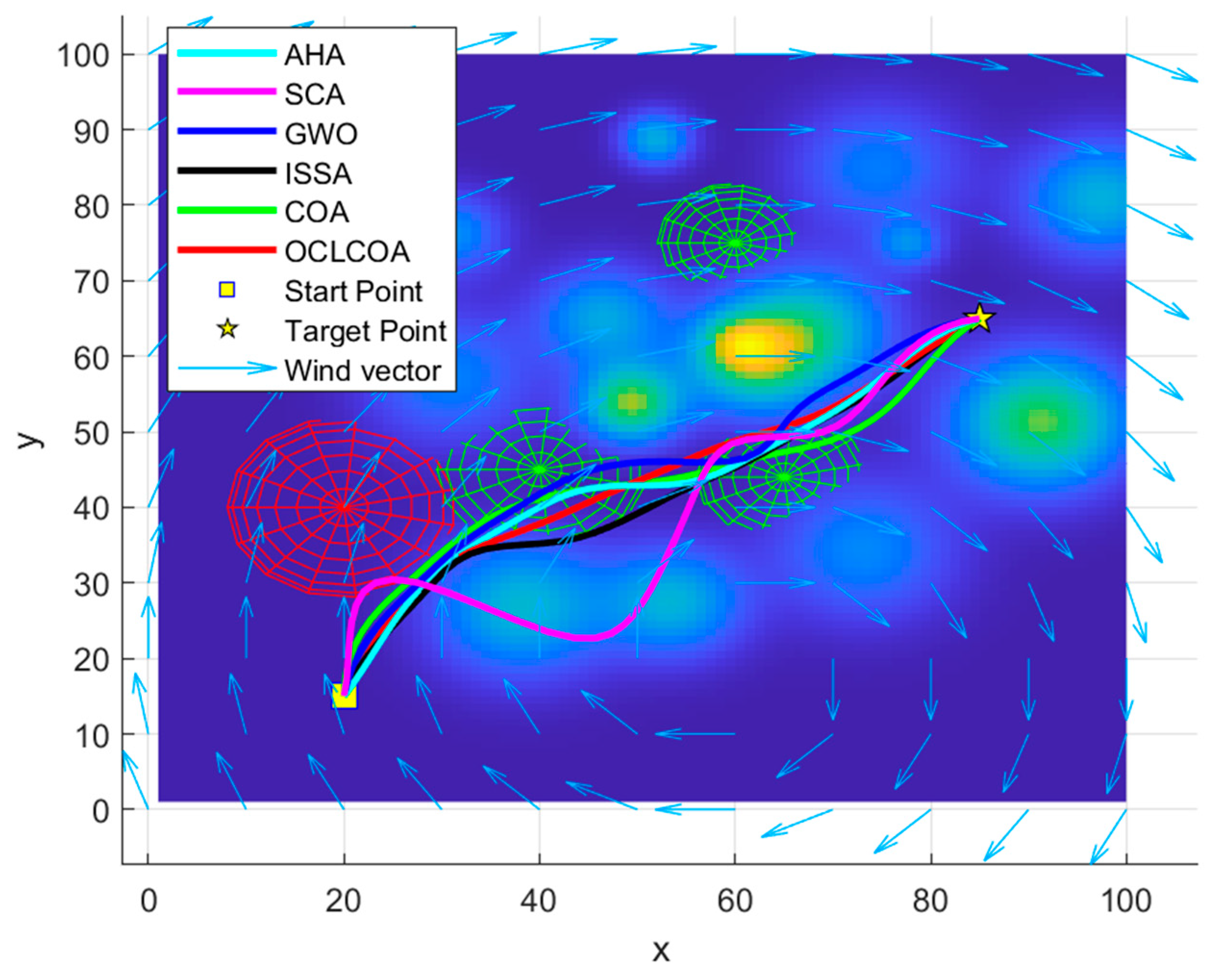
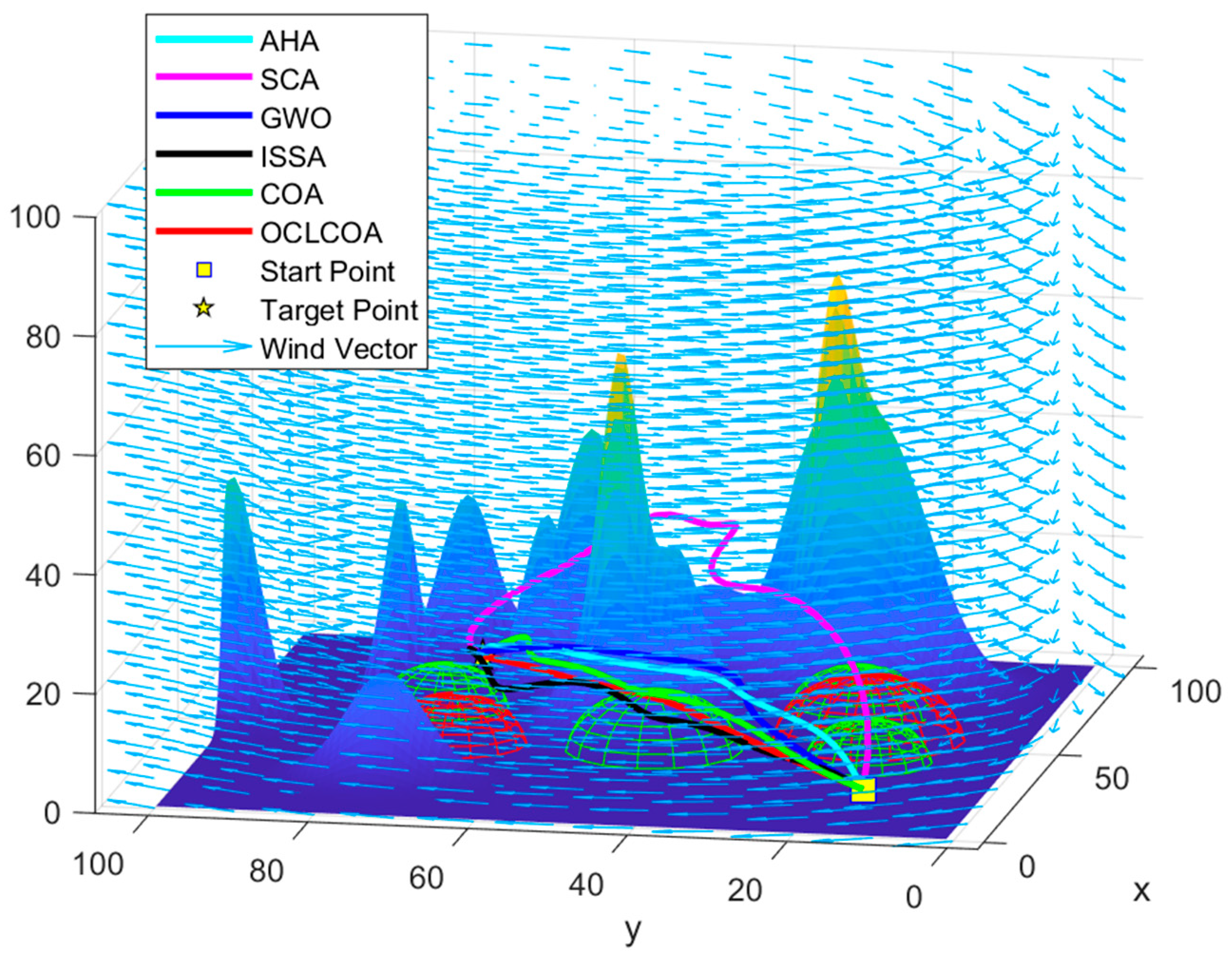
- To fully leverage the aerial advantages of UAVs, a three-dimensional environmental model is constructed considering flight-restricted areas, island terrain, and sea wind factors to simulate the marine environment.
2. Problem Formulation
2.1. Principle of UAV Path Planning
2.1.1. Key Point Generation
2.1.2. Cubic Spline Interpolation
2.2. Environmental Model
2.2.1. Terrain
2.2.2. Wind
2.3. Cost Function
2.3.1. Path Distance Cost
2.3.2. Flight-Restricted Area
2.3.3. Terrain Cost
2.3.4. Path Smoothness
- (1)
- Turning angle
- (2)
- Climbing angle
2.3.5. Wind Field
3. Proposed OCLCOA for Path Planning
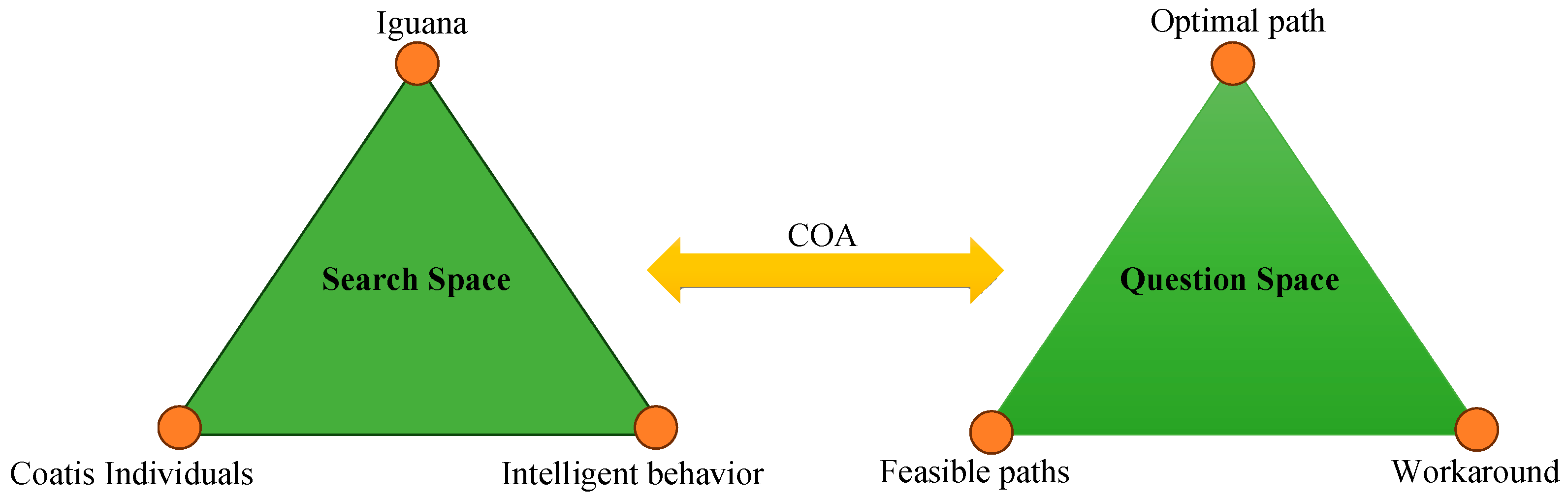
3.1. Coati Optimization Algorithm (COA)
- (1)
- Hunting and attacking strategy on iguana
- (2)
- The process of escaping from predators
3.2. Improvement Strategies
3.2.1. Dynamic Opposite Learning Search (DOL)
3.2.2. Covariance Matrix Learning Search (CML)
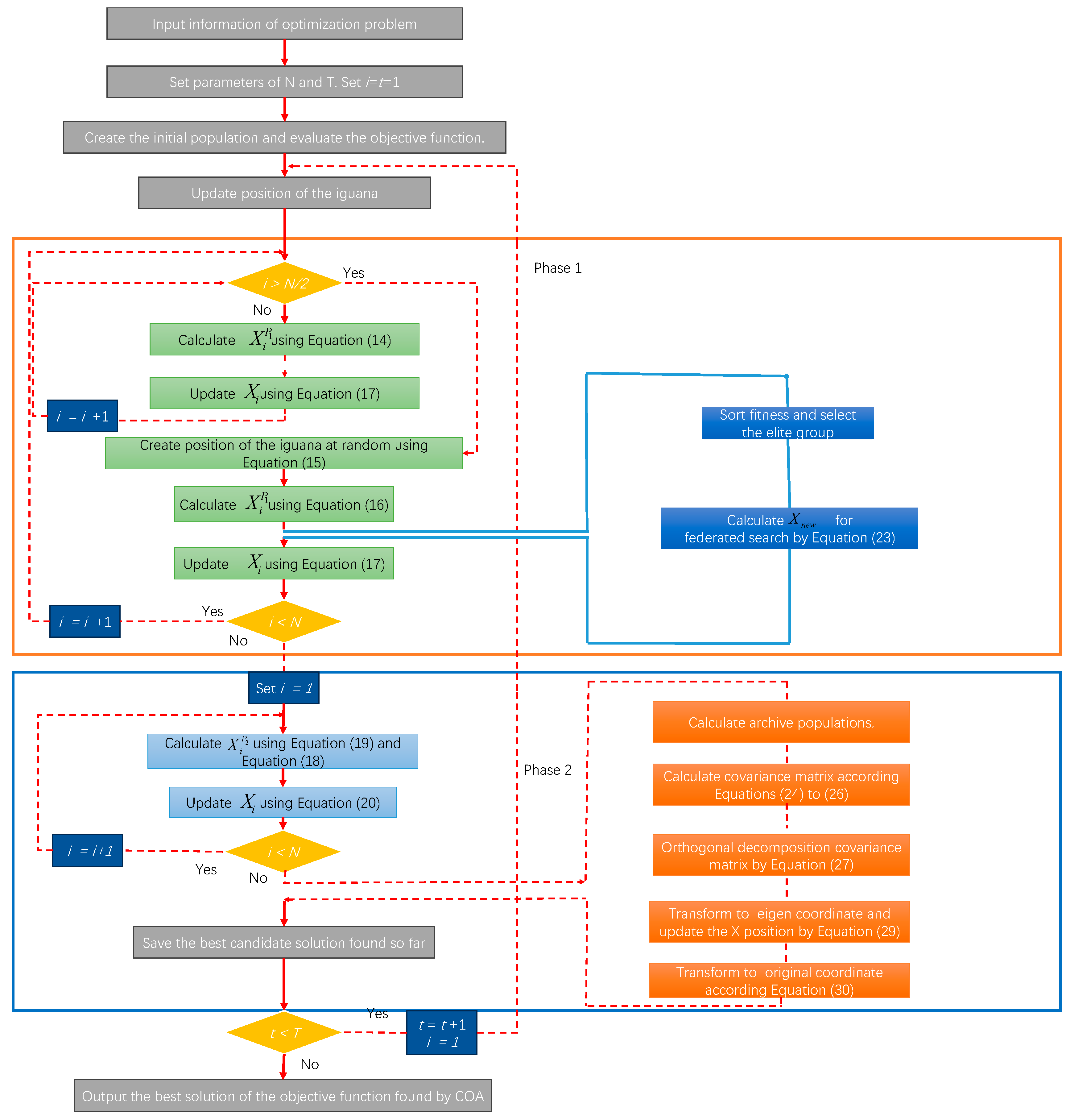
3.3. Overall Framework for Path Planning Based on the OCLCOA
3.4. Time Complexity Analysis
4. Experiment and Results
4.1. Experimental Setup
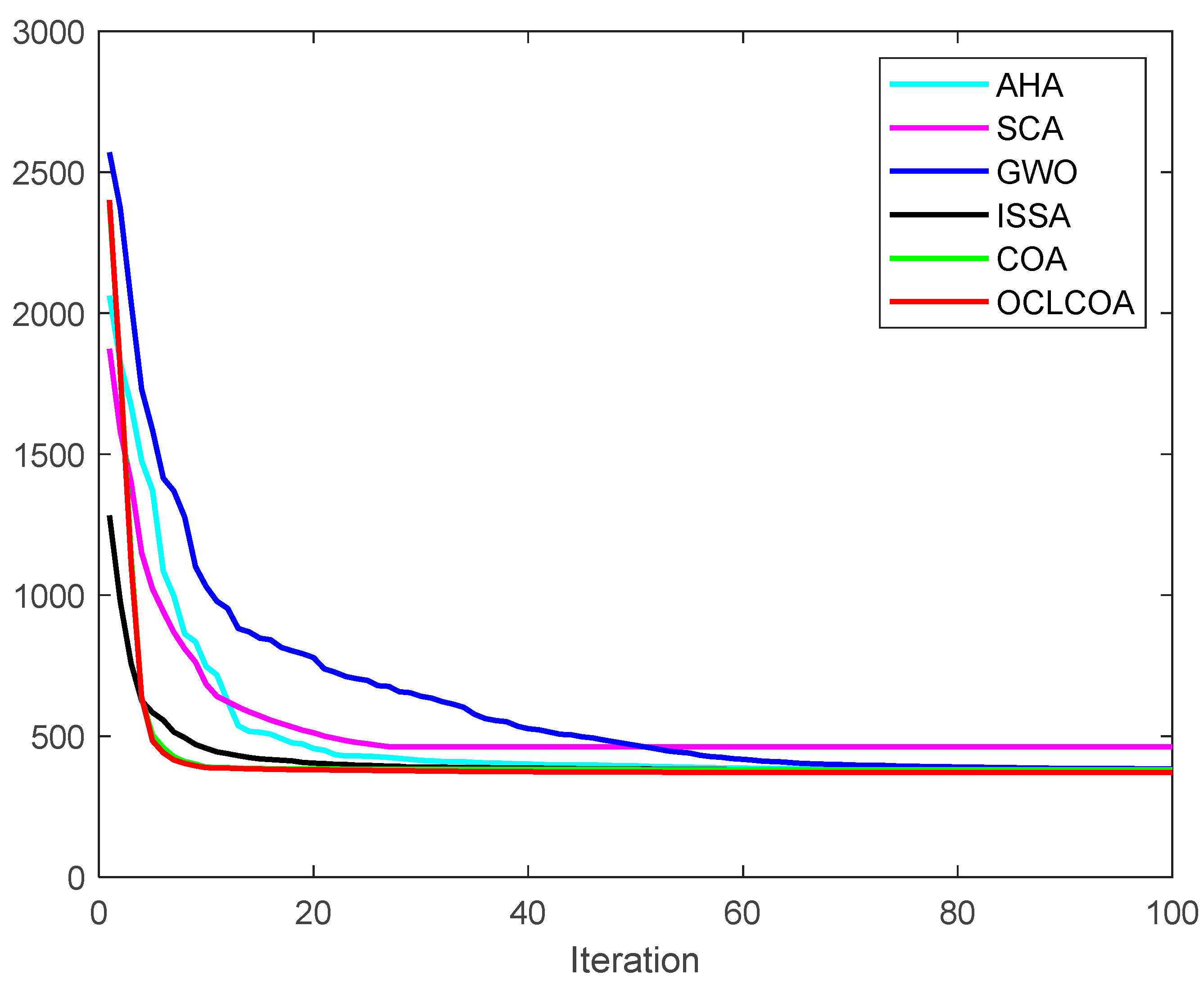
4.2. Experimental Result
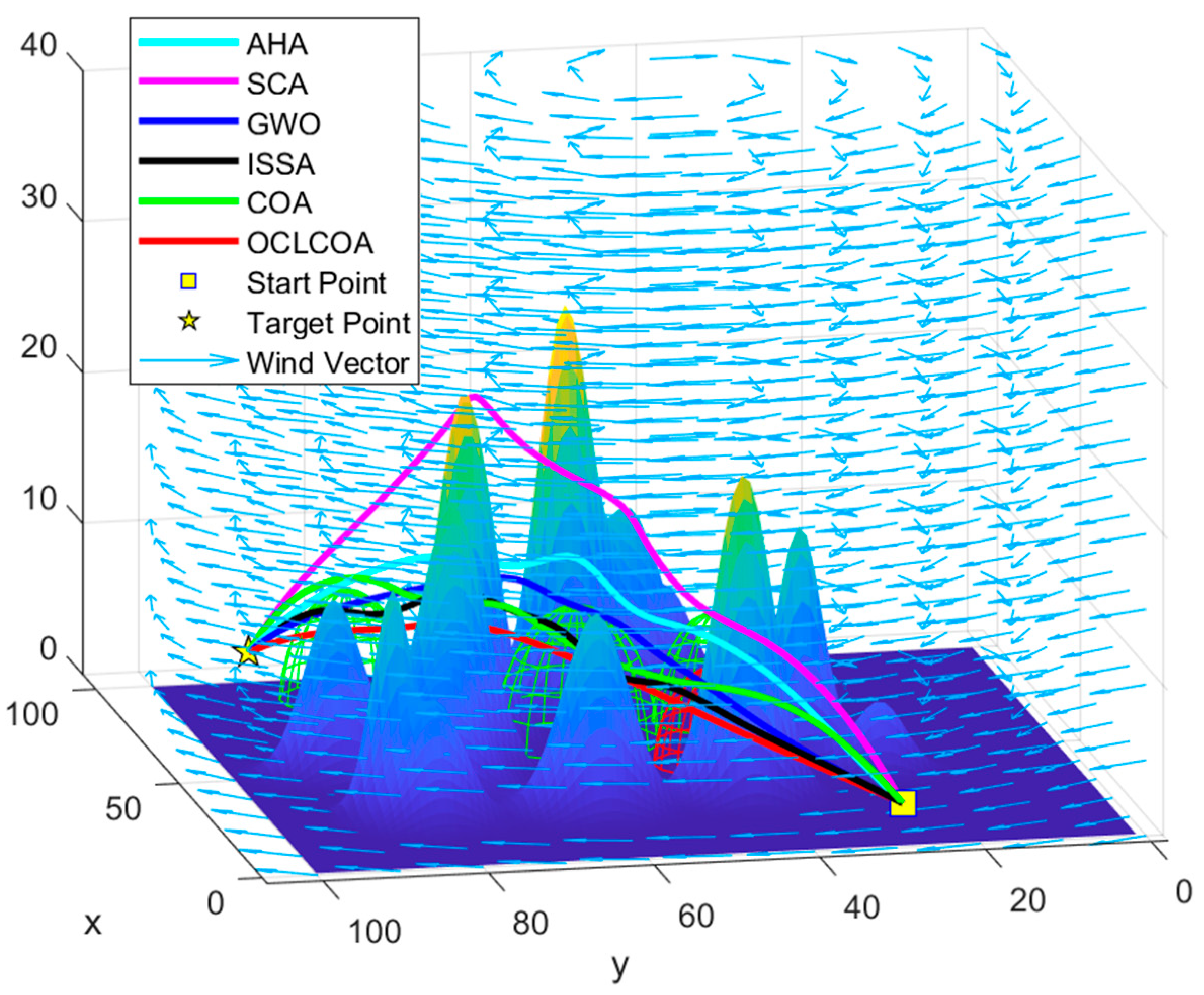
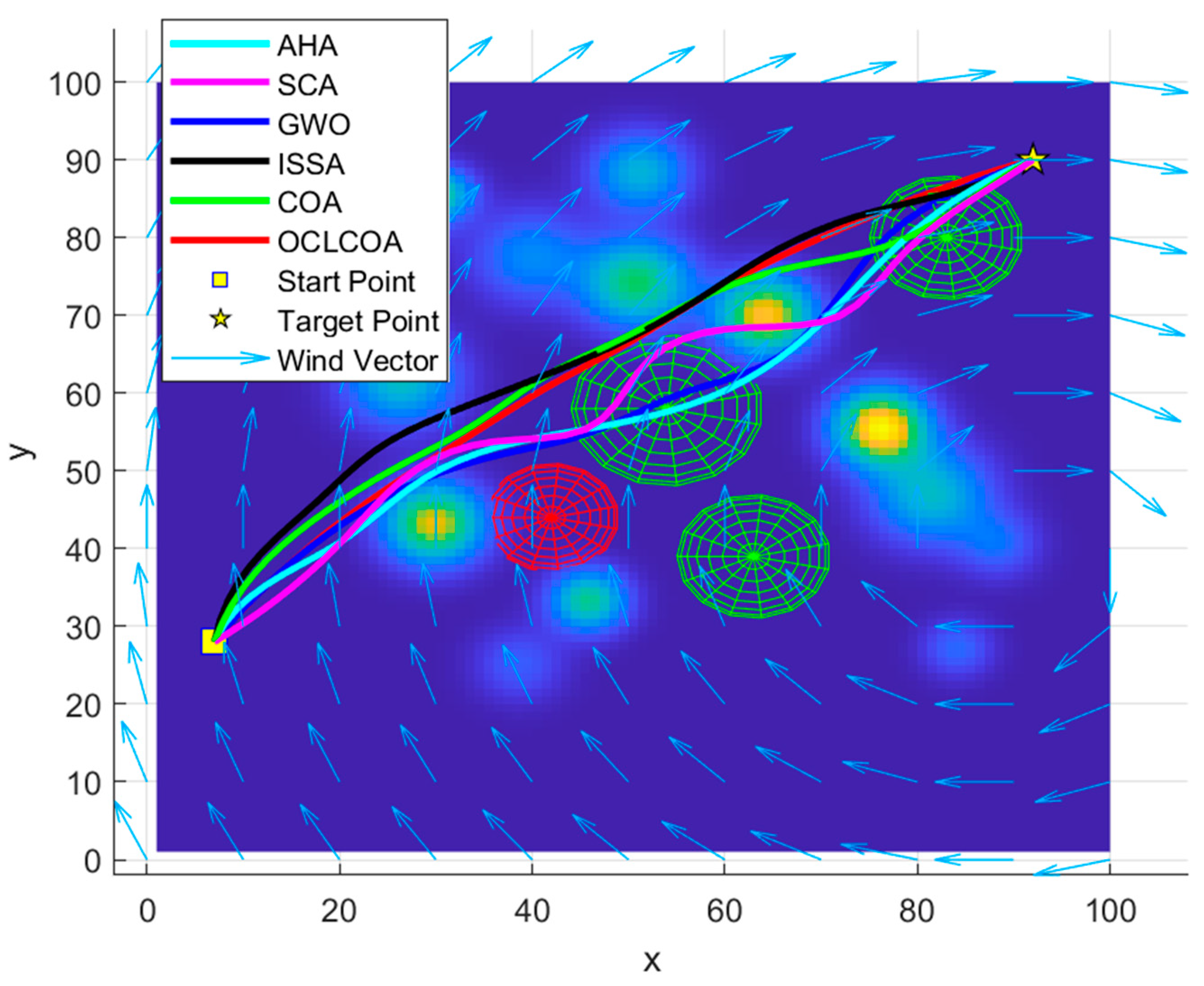
- (1)
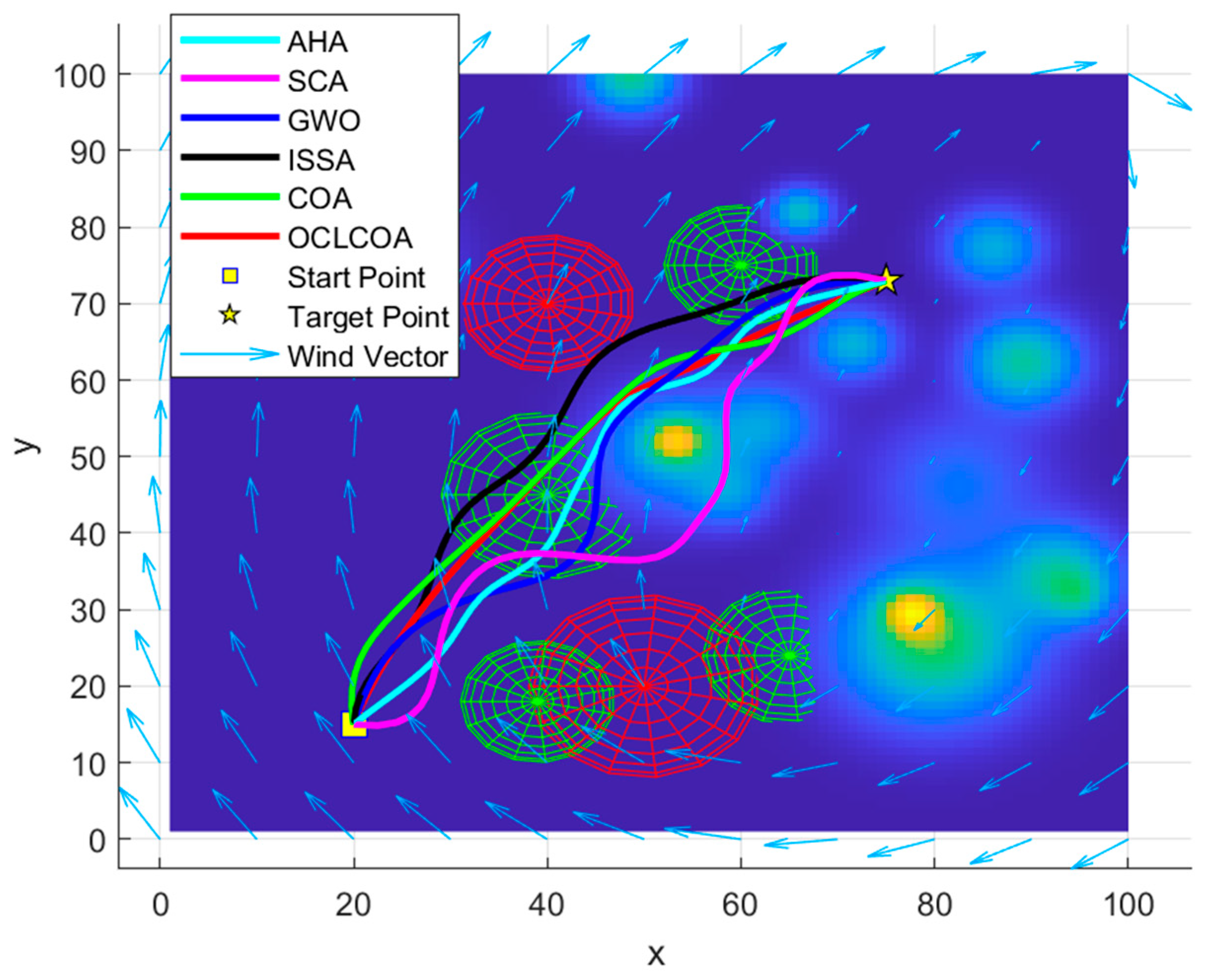
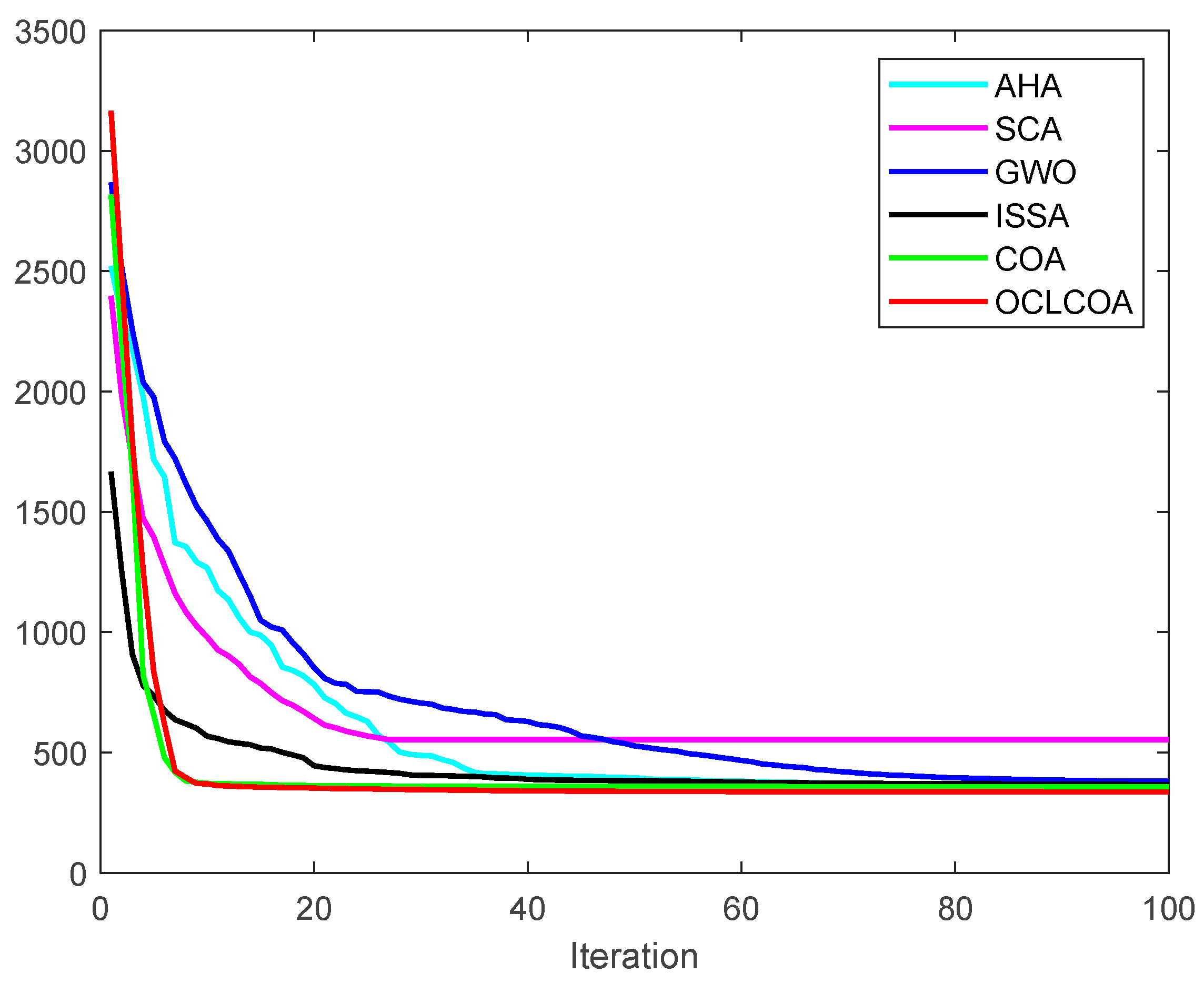
- Analysis of the experimental results of Case 1
- (2)
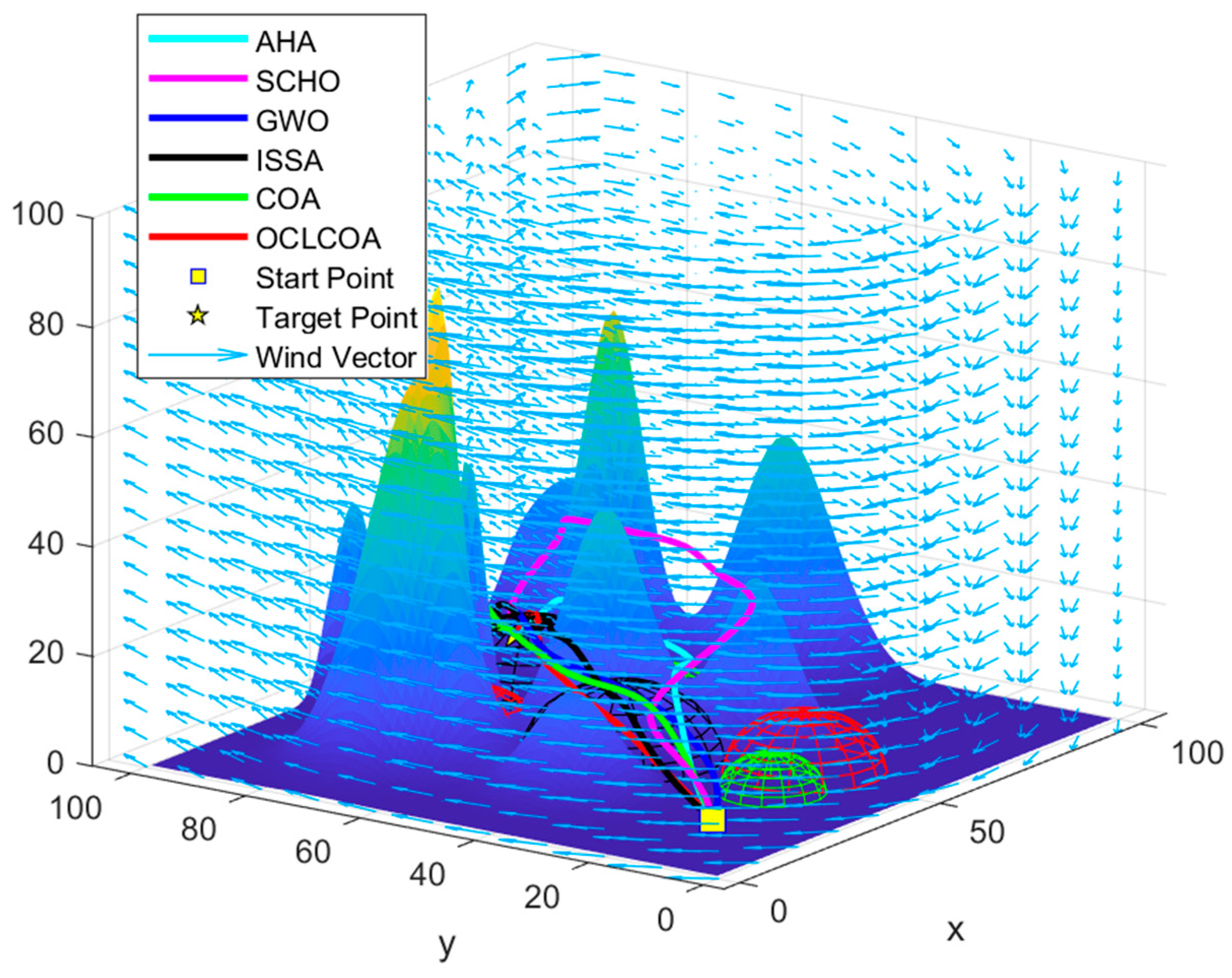
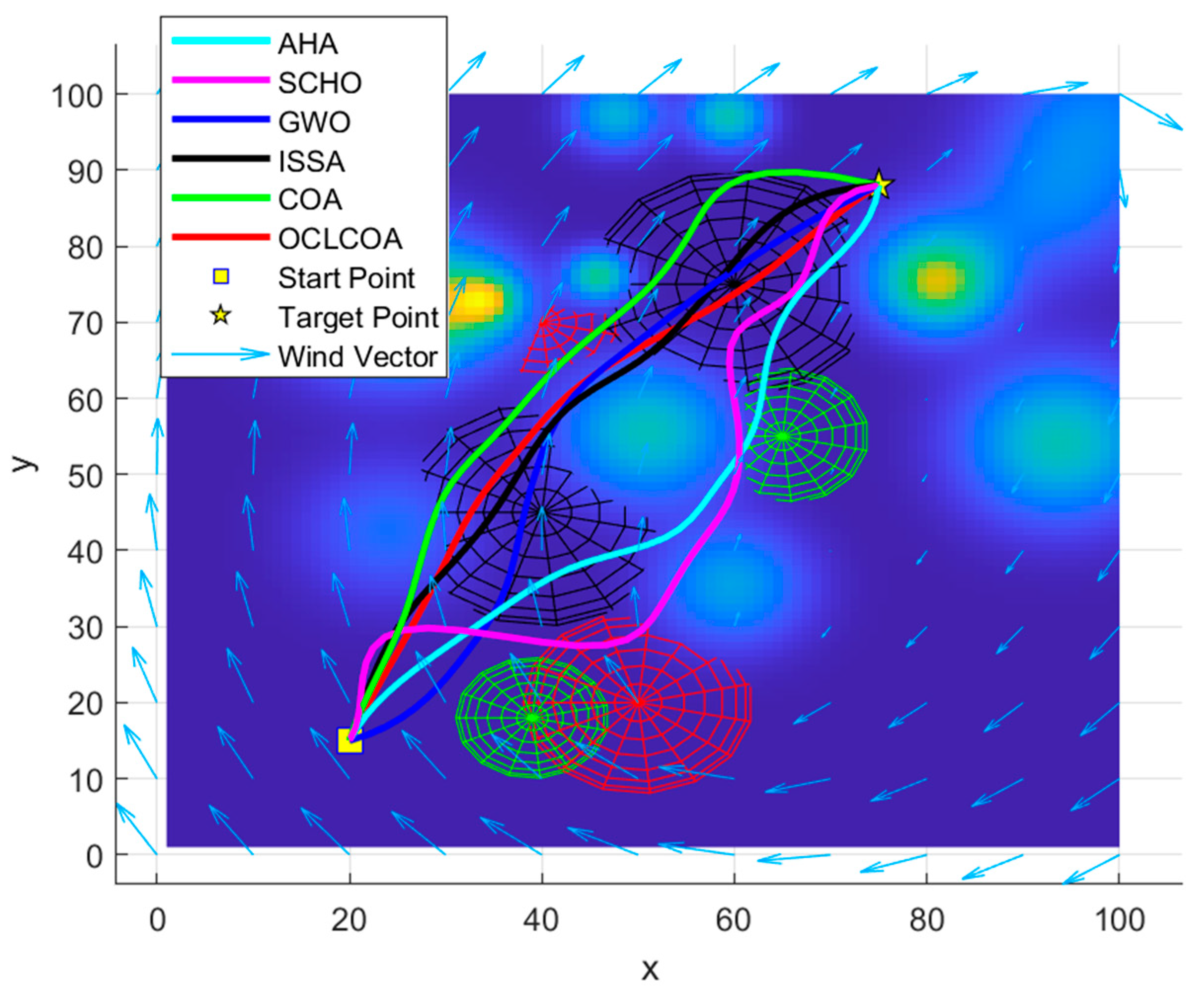
- Analysis of the experimental results of Case 2
- (3)
- Analysis of the experimental results of Case 3
- (4)
- Analysis of the experimental results of Case 4
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wen, H.; Shi, Y.; Wang, S.; Chen, T.; Di, P.; Yang, L. Route Planning for UAVs Maritime Search and Rescue Considering the Targets Moving Situation. Ocean Eng. 2024, 310, 118623. [Google Scholar] [CrossRef]
- Shao, M.; Wu, B.; Li, Y.; Jiang, X. Research on the Deployment of Professional Rescue Ships for Maritime Traffic Safety under Limited Conditions. J. Mar. Sci. Eng. 2024, 12, 497. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV Remote Sensing Applications in Marine Monitoring: Knowledge Visualization and Review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Chen, X.; Shi, M.; Li, R. A Decision Support System Architecture for Intelligent Driven Unmanned Aerial Vehicles Maritime Search and Rescue. In Proceedings of the 2024 10th International Symposium on System Security, Safety, and Reliability (ISSSR), Xiamen, China, 30–31 March 2024; pp. 424–428. [Google Scholar]
- Yan, M.; Yuan, H.; Xu, J.; Yu, Y.; Jin, L. Task Allocation and Route Planning of Multiple UAVs in a Marine Environment Based on an Improved Particle Swarm Optimization Algorithm. EURASIP J. Adv. Signal Process. 2021, 2021, 94. [Google Scholar] [CrossRef]
- Messmer, M.; Zell, A. Evaluating UAV Path Planning Algorithms for Realistic Maritime Search and Rescue Missions. In Proceedings of the 2024 International Conference on Unmanned Aircraft Systems (ICUAS), Chania, Greece, 4–7 June 2024. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A Literature Review of UAV 3D Path Planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar]
- Sun, C.-C.; Jan, G.E.; Leu, S.-W.; Yang, K.-C.; Chen, Y.-C. Near-Shortest Path Planning on a Quadratic Surface With O(Nłog n) Time. IEEE Sens. J. 2015, 15, 6079–6080. [Google Scholar] [CrossRef]
- Zafar, M.N.; Mohanta, J.C. Methodology for Path Planning and Optimization of Mobile Robots: A Review. Procedia Comput. Sci. 2018, 133, 141–152. [Google Scholar] [CrossRef]
- Noto, M.; Sato, H. A Method for the Shortest Path Search by Extended Dijkstra Algorithm. In Proceedings of the Smc 2000 Conference Proceedings. 2000 IEEE International Conference On Systems, Man and Cybernetics. “Cybernetics Evolving to Systems, Humans, Organizations, and Their Complex Interactions” (cat. no.0), Nashville, TN, USA, 8–11 October 2000; Volume 3, pp. 2316–2320. [Google Scholar]
- Warren, C.W. Fast Path Planning Using Modified A* Method. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; Volume 2, pp. 662–667. [Google Scholar]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1129–1133. [Google Scholar] [CrossRef]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems: Background and Practical Approaches; Carbone, G., Gomez-Bravo, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–27. ISBN 978-3-319-14705-5. [Google Scholar]
- Schmid, L.; Pantic, M.; Khanna, R.; Ott, L.; Siegwart, R.; Nieto, J. An Efficient Sampling-Based Method for Online Informative Path Planning in Unknown Environments. IEEE Robot. Autom. Lett. 2020, 5, 1500–1507. [Google Scholar] [CrossRef]
- Tsardoulias, E.G.; Iliakopoulou, A.; Kargakos, A.; Petrou, L. A Review of Global Path Planning Methods for Occupancy Grid Maps Regardless of Obstacle Density. J. Intell. Robot. Syst. 2016, 84, 829–858. [Google Scholar] [CrossRef]
- Kesavan, V.; Kamalakannan, R.; Sudhakarapandian, R.; Sivakumar, P. Heuristic and Meta-Heuristic Algorithms for Solving Medium and Large Scale Sized Cellular Manufacturing System NP-Hard Problems: A Comprehensive Review. Mater. Today Proc. 2020, 21, 66–72. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A Review of Artificial Intelligence Applied to Path Planning in UAV Swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A Review on Representative Swarm Intelligence Algorithms for Solving Optimization Problems: Applications and Trends. IEEECAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Adam, S.P.; Alexandropoulos, S.-A.N.; Pardalos, P.M.; Vrahatis, M.N. No Free Lunch Theorem: A Review. In Approximation and Optimization: Algorithms, Complexity and Applications; Demetriou, I.C., Pardalos, P.M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 57–82. ISBN 978-3-030-12767-1. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial Hummingbird Algorithm: A New Bio-Inspired Optimizer with Its Engineering Applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Trojovská, E.; Trojovský, P. Coati Optimization Algorithm: A New Bio-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Knowl.-Based Syst. 2023, 259, 110011. [Google Scholar] [CrossRef]
- Emary, E.; Zawbaa, H.M.; Hassanien, A.E. Binary Grey Wolf Optimization Approaches for Feature Selection. Neurocomputing 2016, 172, 371–381. [Google Scholar] [CrossRef]
- Masehian, E.; Sedighizadeh, D. A Multi-Objective PSO-Based Algorithm for Robot Path Planning. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 465–470. [Google Scholar]
- Qtaish, A.; Braik, M.; Albashish, D.; Alshammari, M.T.; Alreshidi, A.; Alreshidi, E.J. Enhanced Coati Optimization Algorithm Using Elite Opposition-Based Learning and Adaptive Search Mechanism for Feature Selection. Int. J. Mach. Learn. Cybern. 2024. [Google Scholar] [CrossRef]
- Abou Houran, M.; Salman Bukhari, S.M.; Zafar, M.H.; Mansoor, M.; Chen, W. COA-CNN-LSTM: Coati Optimization Algorithm-Based Hybrid Deep Learning Model for PV/Wind Power Forecasting in Smart Grid Applications. Appl. Energy 2023, 349, 121638. [Google Scholar] [CrossRef]
- Emam, M.M.; Houssein, E.H.; Samee, N.A.; Alohali, M.A.; Hosney, M.E. Breast Cancer Diagnosis Using Optimized Deep Convolutional Neural Network Based on Transfer Learning Technique and Improved Coati Optimization Algorithm. Expert Syst. Appl. 2024, 255, 124581. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, X.; Yang, Z.; Li, X.; Wang, P.; Ding, R.; Liu, W. An Enhanced Differential Evolution Algorithm with a New Oppositional-Mutual Learning Strategy. Neurocomputing 2021, 435, 162–175. [Google Scholar] [CrossRef]
- Deng, L.; Liu, S. Incorporating Q-Learning and Gradient Search Scheme into JAYA Algorithm for Global Optimization. Artif. Intell. Rev. 2023, 56, 3705–3748. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime Search and Rescue Based on Group Mobile Computing for Unmanned Aerial Vehicles and Unmanned Surface Vehicles. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, H.J.; Lee, H.; Shim, D.H.; Kim, S.-Y. Coverage Path Planning for Multiple Unmanned Aerial Vehicles in Maritime Search and Rescue Operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H. An Improved Constrained Differential Evolution Algorithm for Unmanned Aerial Vehicle Global Route Planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Li, W.; Tan, M.; Wang, L.; Wang, Q. A Cubic Spline Method Combing Improved Particle Swarm Optimization for Robot Path Planning in Dynamic Uncertain Environment. Int. J. Adv. Robot. Syst. 2020, 17, 1–12. [Google Scholar] [CrossRef]
- Lian, J.; Yu, W.; Xiao, K.; Liu, W. Cubic Spline Interpolation-Based Robot Path Planning Using a Chaotic Adaptive Particle Swarm Optimization Algorithm. Math. Probl. Eng. 2020, 2020, 1849240. [Google Scholar] [CrossRef]
- Li, X.; Yu, S. Three-Dimensional Path Planning for AUVs in Ocean Currents Environment Based on an Improved Compression Factor Particle Swarm Optimization Algorithm. Ocean Eng. 2023, 280, 114610. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. Three-Dimensional UCAV Path Planning Using a Novel Modified Artificial Ecosystem Optimizer. Expert Syst. Appl. 2023, 217, 119499. [Google Scholar] [CrossRef]
- Stodola, P.; Nohel, J. Reconnaissance in Complex Environment with No-Fly Zones Using a Swarm of Unmanned Aerial Vehicles. In Modelling and Simulation for Autonomous Systems, Proceedings of the 8th International Conference, MESAS 2021, Virtual Event, 13–14 October 2021, Revised Selected Papers; Mazal, J., Fagiolini, A., Vasik, P., Turi, M., Bruzzone, A., Pickl, S., Neumann, V., Stodola, P., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 308–321. [Google Scholar]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. Three-Dimensional Collaborative Path Planning for Multiple UCAVs Based on Improved Artificial Ecosystem Optimizer and Reinforcement Learning. Knowl.-Based Syst. 2023, 276, 110782. [Google Scholar] [CrossRef]
- Chung, H.-M.; Maharjan, S.; Zhang, Y.; Eliassen, F.; Strunz, K. Placement and Routing Optimization for Automated Inspection with Unmanned Aerial Vehicles: A Study in Offshore Wind Farm. IEEE Trans. Ind. Inform. 2021, 17, 3032–3043. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, X. An Improved Quantum-Behaved Particle Swarm Optimization Algorithm Combined with Reinforcement Learning for AUV Path Planning. J. Robot. 2023, 2023, e8821906. [Google Scholar] [CrossRef]
- Bai, J.; Li, Y.; Zheng, M.; Khatir, S.; Benaissa, B.; Abualigah, L.; Wahab, M.A. A Sinh Cosh Optimizer. Knowl.-Based Syst. 2023, 282, 111081. [Google Scholar] [CrossRef]
- Tudose, A.M.; Sidea, D.O.; Picioroaga, I.I.; Anton, N.; Bulac, C. Increasing Distributed Generation Hosting Capacity Based on a Sequential Optimization Approach Using an Improved Salp Swarm Algorithm. Mathematics 2024, 12, 48. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters |
|---|---|
| SCHO | , , , , , , |
| GWO | / |
| AHA | / |
| ISSA | , |
| COA | / |
| OCLCOA |
| Case Number | Threat Center | Threat Radius | Threat Level |
|---|---|---|---|
| Case 1 | (42, 44), (54, 58), (63, 39), (83, 80) | 7, 10, 8, 8 | 12, 8, 10, 10 |
| Case 2 | (20, 40), (65, 44), (40, 45), (60, 75) | 12, 9, 11, 8 | 12, 8, 10, 10 |
| Case 3 | (50, 20), (65, 24), (40, 45), (60, 75) | 12, 9, 11, 8, 9, 8 | 12, 8, 10, 10, 11, 9 |
| (40, 70), (39, 18) | |||
| Case 4 | (50,20), (65,55), (40,45), (60,75), (40,70), (39,18) | 12, 9, 15, 15, 9, 8 | 12, 8, 100,000, 100,000, 11, 9 |
| Case Number | Center of Wind | Vortex Force |
|---|---|---|
| Case 1 | (90, 40, z) | 100 |
| Case 2 | (60, 20, z) | 100 |
| Case 3 | (60, 20, z), (95, 95, z) | 100 |
| Case 4 | (60, 20, z), (95, 95, z) | 100 |
| AHA | GWO | ISSA | SCHO | COA | OCLCOA | |
| best | 373.606 | 370.8464 | 368.3236 | 388.6394 | 369.5416 | 363.8627 |
| worst | 386.7746 | 394.7373 | 393.3506 | 698.881 | 389.9641 | 374.2758 |
| mean | 377.2344 | 384.3177 | 378.5627 | 462.1609 | 380.8371 | 370.3685 |
| std | 3.8415 | 7.042375 | 8.182222 | 88.50879 | 6.909722 | 3.7746 |
| AHA | GWO | ISSA | SCHO | COA | OCLCOA | |
|---|---|---|---|---|---|---|
| best | 358.7826 | 318.3921 | 302.7449 | 406.6434 | 359.5944 | 297.2654 |
| worst | 384.2930 | 485.0109 | 396.2466 | 813.3052 | 553.3509 | 300.6004 |
| mean | 368.0918 | 376.4741 | 345.7796 | 560.0747 | 449.6301 | 298.1347 |
| std | 9.4373 | 48.22716 | 35.50665 | 138.136 | 62.93447 | 1.0972 |
| AHA | GWO | ISSA | SCHO | COA | OCLCOA | |
|---|---|---|---|---|---|---|
| best | 347.8254 | 350.4642 | 345.5671 | 414.7658 | 343.48 | 336.3658 |
| worst | 363.8949 | 404.9287 | 394.4875 | 794.1183 | 372.6724 | 338.0068 |
| mean | 355.7923 | 381.1501 | 366.7454 | 553.8437 | 357.4407 | 336.7215 |
| std | 5.6371 | 19.22943 | 19.47307 | 139.6807 | 11.22852 | 0.5207 |
| AHA | GWO | ISSA | SCHO | COA | OCLCOA | |
|---|---|---|---|---|---|---|
| best | 365.5839 | 357.6008 | 359.8623 | 415.449 | 371.3288 | 349.2881 |
| worst | 380.6820 | 595.3989 | 406.8791 | 908.5643 | 451.8913 | 360.0667 |
| mean | 373.0015 | 415.0495 | 377.5996 | 592.7857 | 398.7402 | 354.1212 |
| std | 4.3792 | 75.55398 | 13.98372 | 195.4778 | 25.28233 | 3.941439 |
| AHA | SCHO | GWO | ISSA | COA | OCLCOA | |
|---|---|---|---|---|---|---|
| Case 1 | 112.0129 | 148.8177 | 115.7833 | 113.2852 | 113.4264 | 108.7025 |
| Case 2 | 96.0262 | 195.8193 | 122.0939 | 110.2201 | 139.5378 | 88.5176 |
| Case 3 | 92.6224 | 177.8489 | 107.0696 | 98.4565 | 95.965 | 84.6041 |
| Case 4 | 108.3449 | 195.6559 | 127.2776 | 111.132 | 123.9482 | 99.8476 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, F.; Li, H.; Mei, X. Three-Dimensional Path Planning of UAVs for Offshore Rescue Based on a Modified Coati Optimization Algorithm. J. Mar. Sci. Eng. 2024, 12, 1676. https://doi.org/10.3390/jmse12091676
Miao F, Li H, Mei X. Three-Dimensional Path Planning of UAVs for Offshore Rescue Based on a Modified Coati Optimization Algorithm. Journal of Marine Science and Engineering. 2024; 12(9):1676. https://doi.org/10.3390/jmse12091676
Chicago/Turabian StyleMiao, Fahui, Hangyu Li, and Xiaojun Mei. 2024. "Three-Dimensional Path Planning of UAVs for Offshore Rescue Based on a Modified Coati Optimization Algorithm" Journal of Marine Science and Engineering 12, no. 9: 1676. https://doi.org/10.3390/jmse12091676
APA StyleMiao, F., Li, H., & Mei, X. (2024). Three-Dimensional Path Planning of UAVs for Offshore Rescue Based on a Modified Coati Optimization Algorithm. Journal of Marine Science and Engineering, 12(9), 1676. https://doi.org/10.3390/jmse12091676