
Functional Conception of Biomimetic Artificial Reefs Using Parametric Design and Modular Construction

 , , ,
, , ,  , , and
, , and
Abstract
1. Introduction
1.1. Geometry and Function
1.1.1. Fisheries and Biodiversity Restoration
- Topology—AR topology should aim at creating spatial diversity and protection from strong water movements;
- Articulation—Spatial arrangement and structural complexity should be achieved in order to provide a range of habitats and guarantee protection from predators;
- Texture—The substrate materials and surface finish should be adequate for sessile (stationary) organisms attachment.
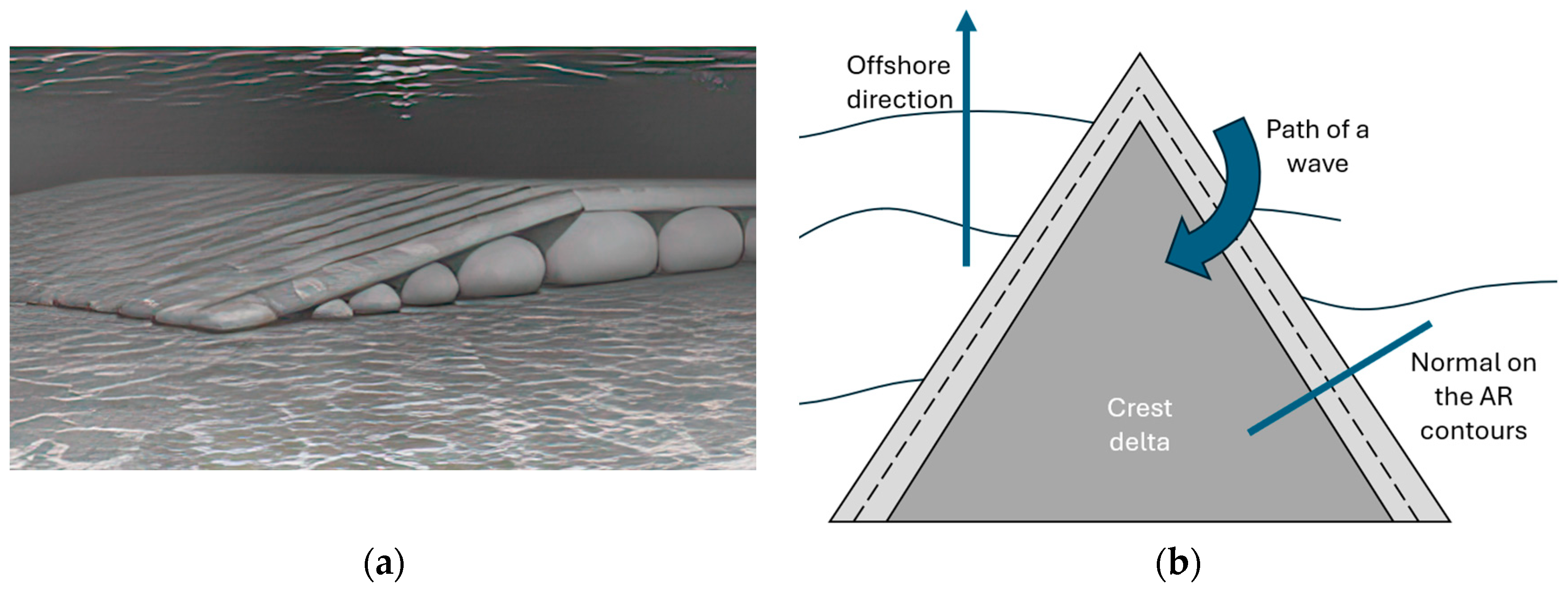
1.1.2. Coastal Erosion and Surfing Enhancement
1.1.3. Tourism Attraction
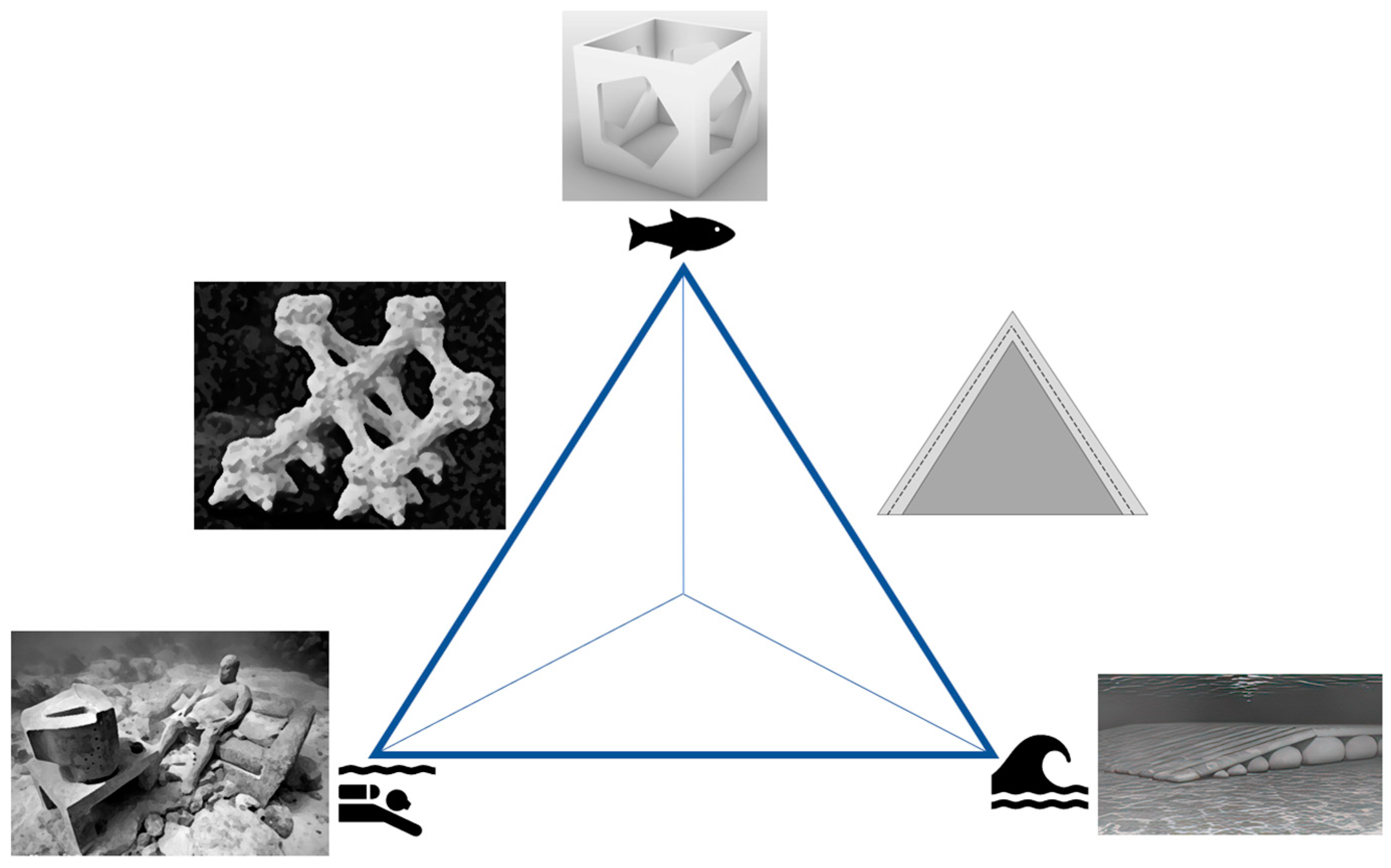
1.1.4. Artificial Reef Geometry–Function Relationship
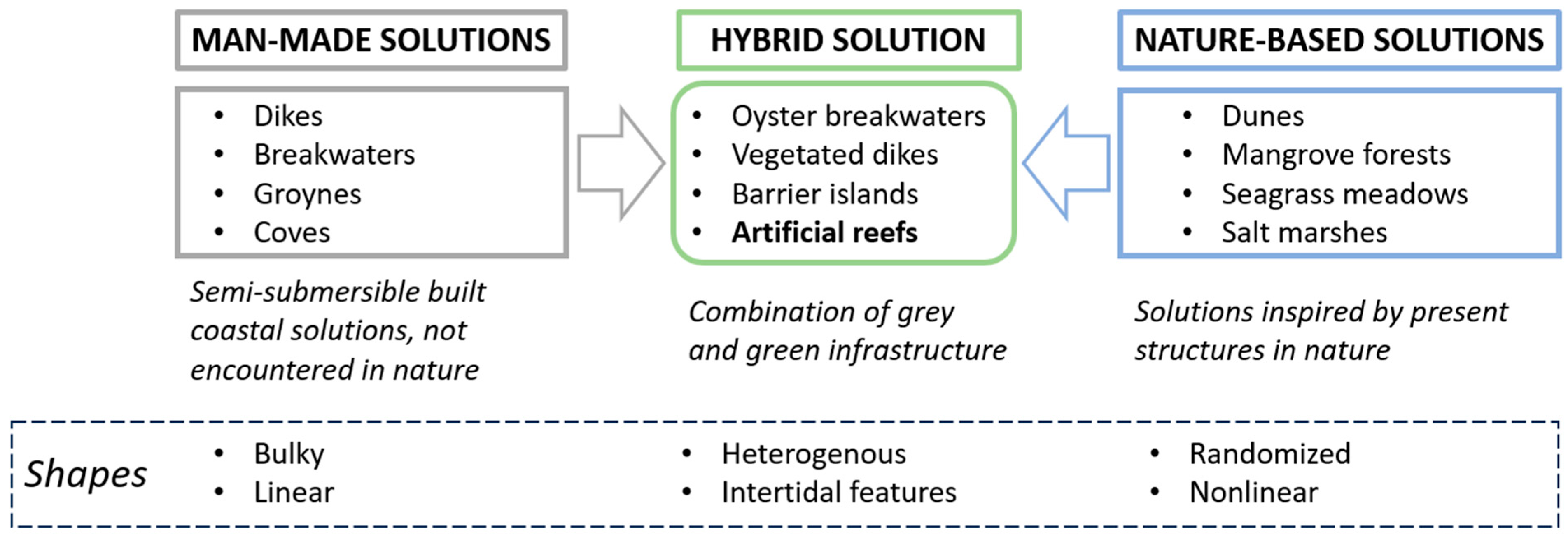
1.2. Deployment Area
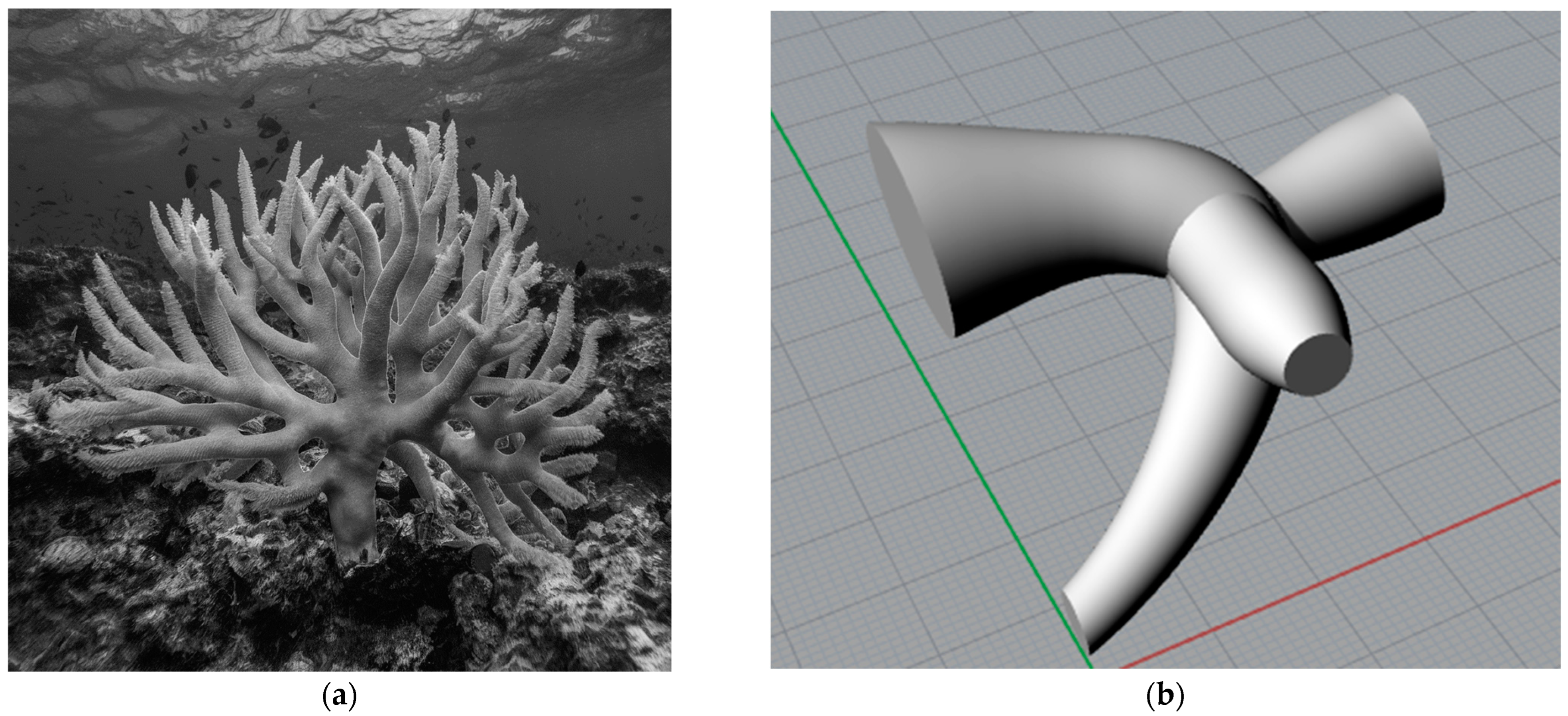
1.3. Design Process and Biomimicking
2. Materials and Methods
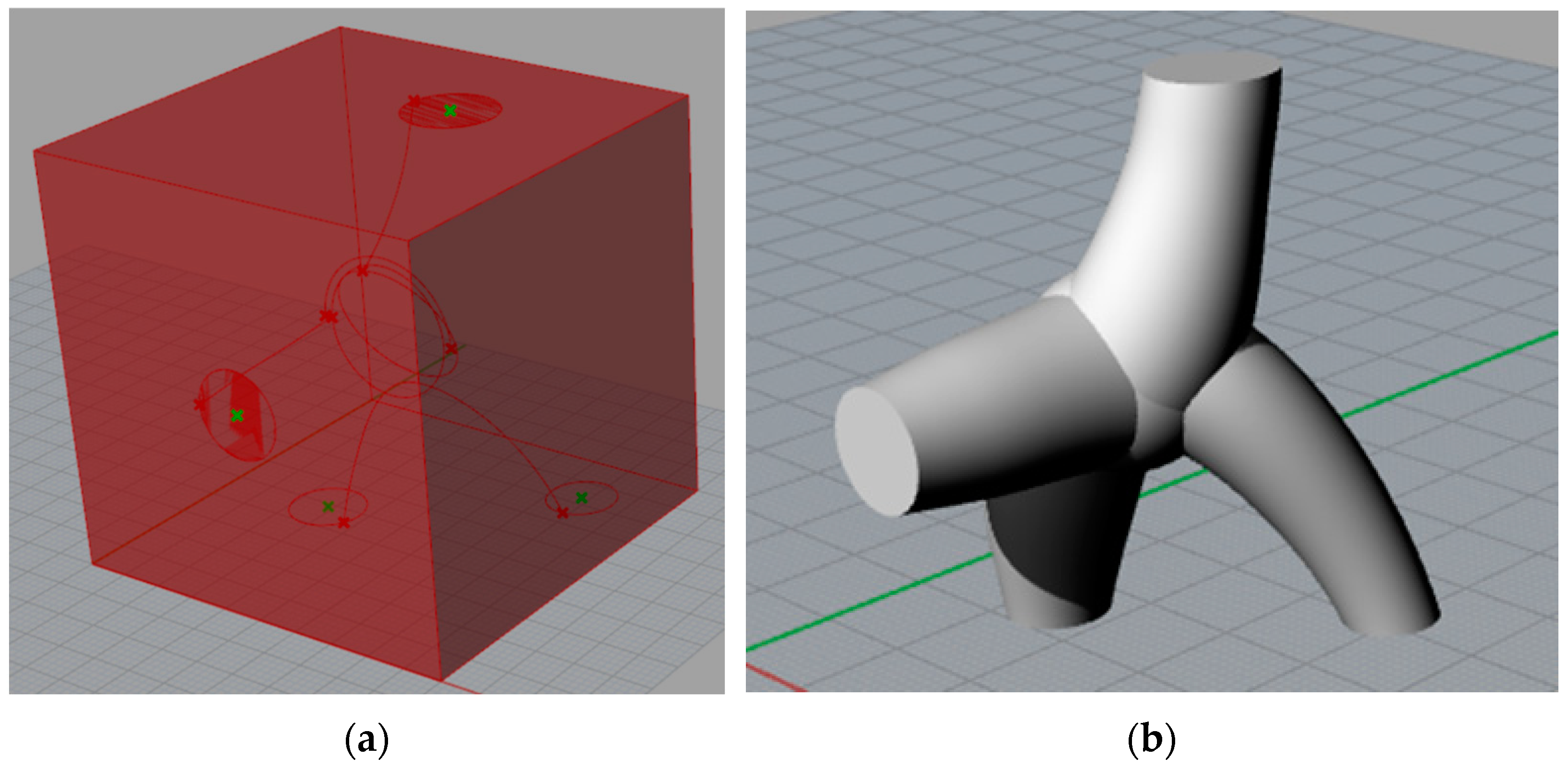
2.1. Parametric Design-Based Approach
- Adoption of a natural reef mimicking shape: natural marine habitats adopt topologies that are determined by environmental exposure conditions, as well as organisms’ growth at the micro and macro level. These are optimal for specific flora and fauna species at different levels of the food chain, exhibiting structural complexity typical of natural habitats [68];
- Various assembly possibilities and macro-arrangements: this is achieved by introducing modular construction, which offers a wider range of structural possibilities based on a limited number of units, optimizing costs and resources. These become of great importance when local effects are taken into account, e.g., the bathymetry profile, organisms’ diversity, currents and wave principal directions, and AR dimensions, among others;
- Expanded AR functions: technological and engineered ARs may offer other possibilities to secure a wider set of functions that an AR can perform, based on the embedment of systems and networks that conventional gray infrastructures do not include. Examples are energy sources, interconnected electric and electronic networks and sensors. These enhance taking advantage of the huge resources typically allocated to build an AR, contributing to a wider range of functions aimed at marine ecosystems restoration [19];
- Semi-permeable structure: unlike the massive coastal protection structures described previously, the final geometry is required to be reticulated, geometrically complex and spatially distributed, maintaining the requirement of biomimicking, while guaranteeing benefits for direct or indirect erosion prevention (example: the creation of AR barriers, discussed in Section 3.4);
- Attractive to tourists, recreational divers and local communities: in order to generate interest from divers and tourists, the geometry and other AR features are required to guarantee appealing features not only to marine biodiversity but also to the human population;
- Iterative design sequence: after the starting stage of delivering the initial shape, prototyping and testing follows. The analysis of the results obtained after the preliminary testing of the initial shape results in a series of additional design features to be implemented, which are reconsidered and possibly implemented. Then, a new stage of prototyping and testing follows, until the optimal design of the MFAR is assumed as properly satisfying the current design and application requirements.
2.2. Design Procedures and Variable
3. Results
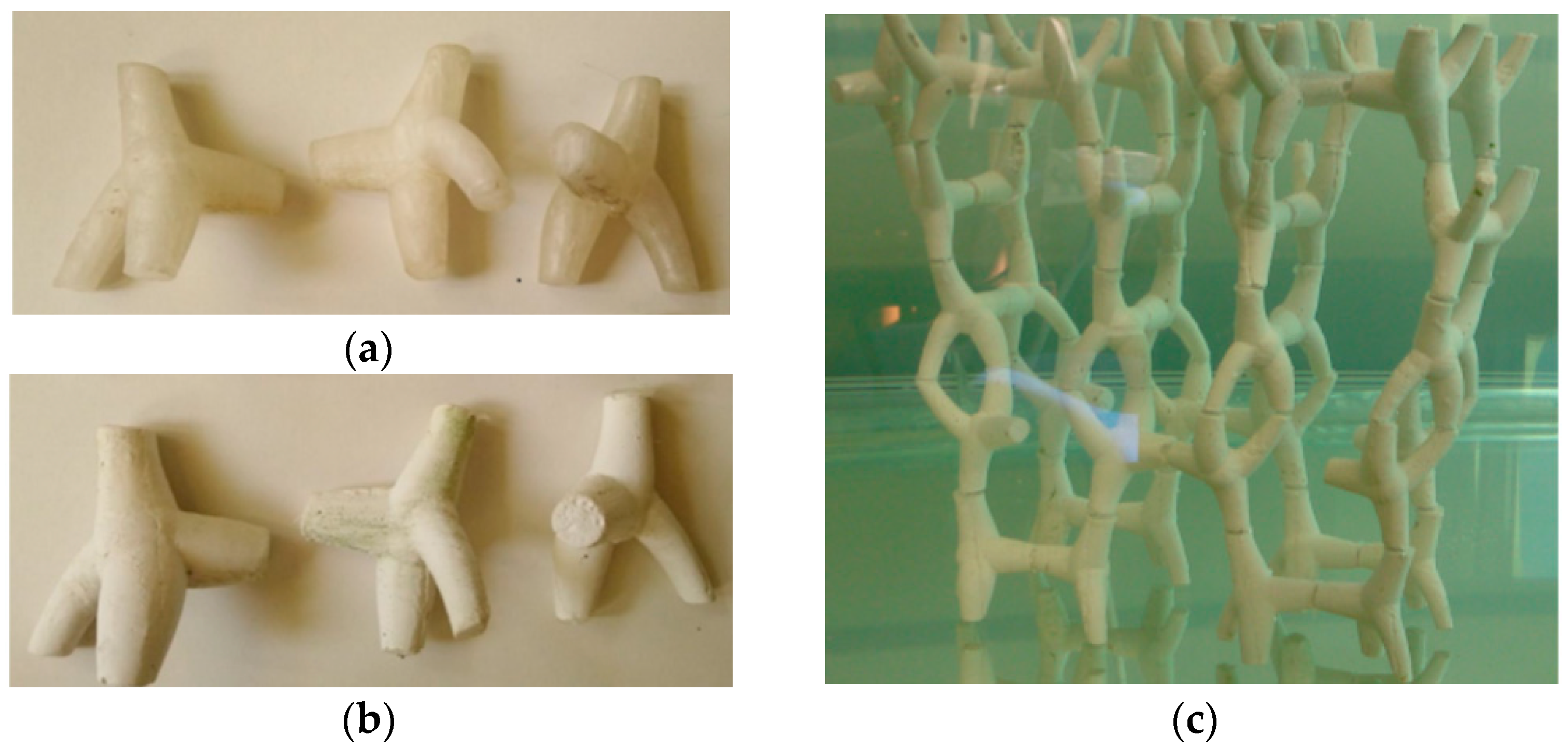
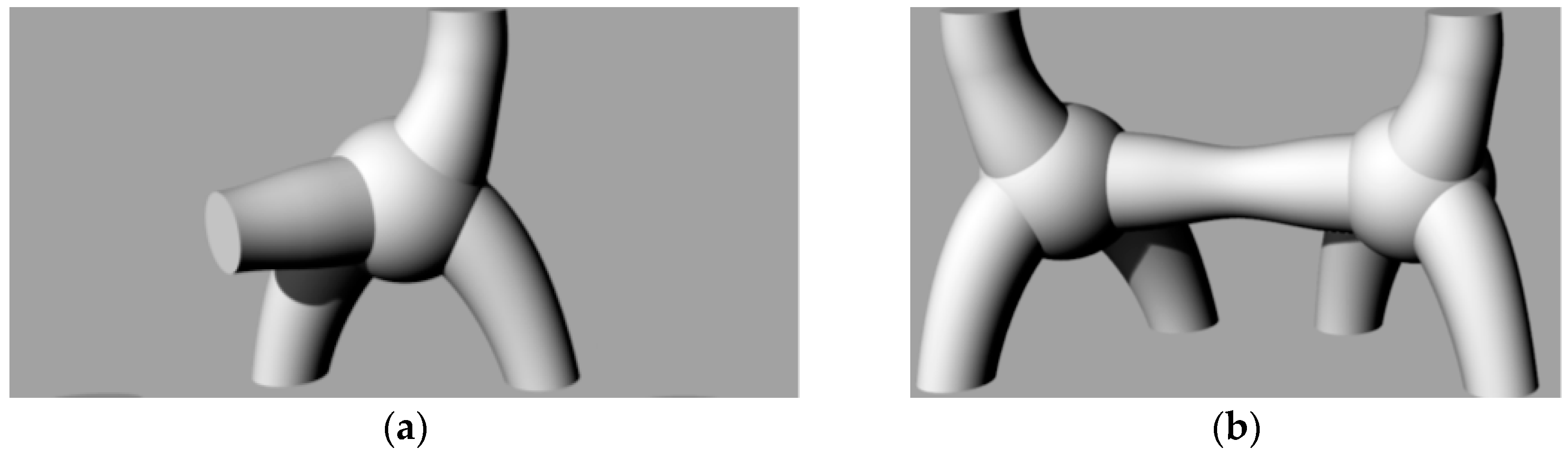
3.1. First MFAR Unit and Assembly Prototyping
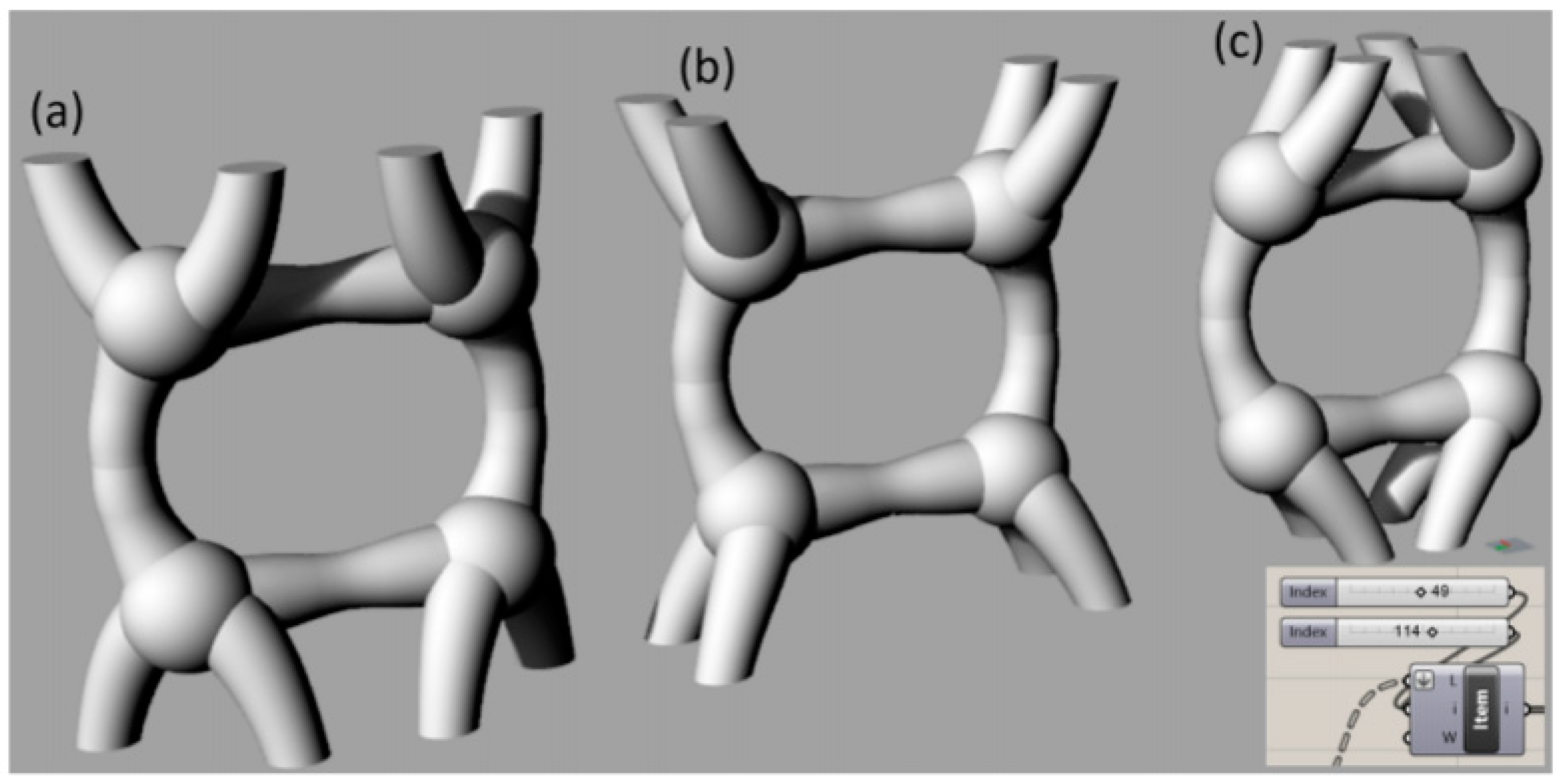
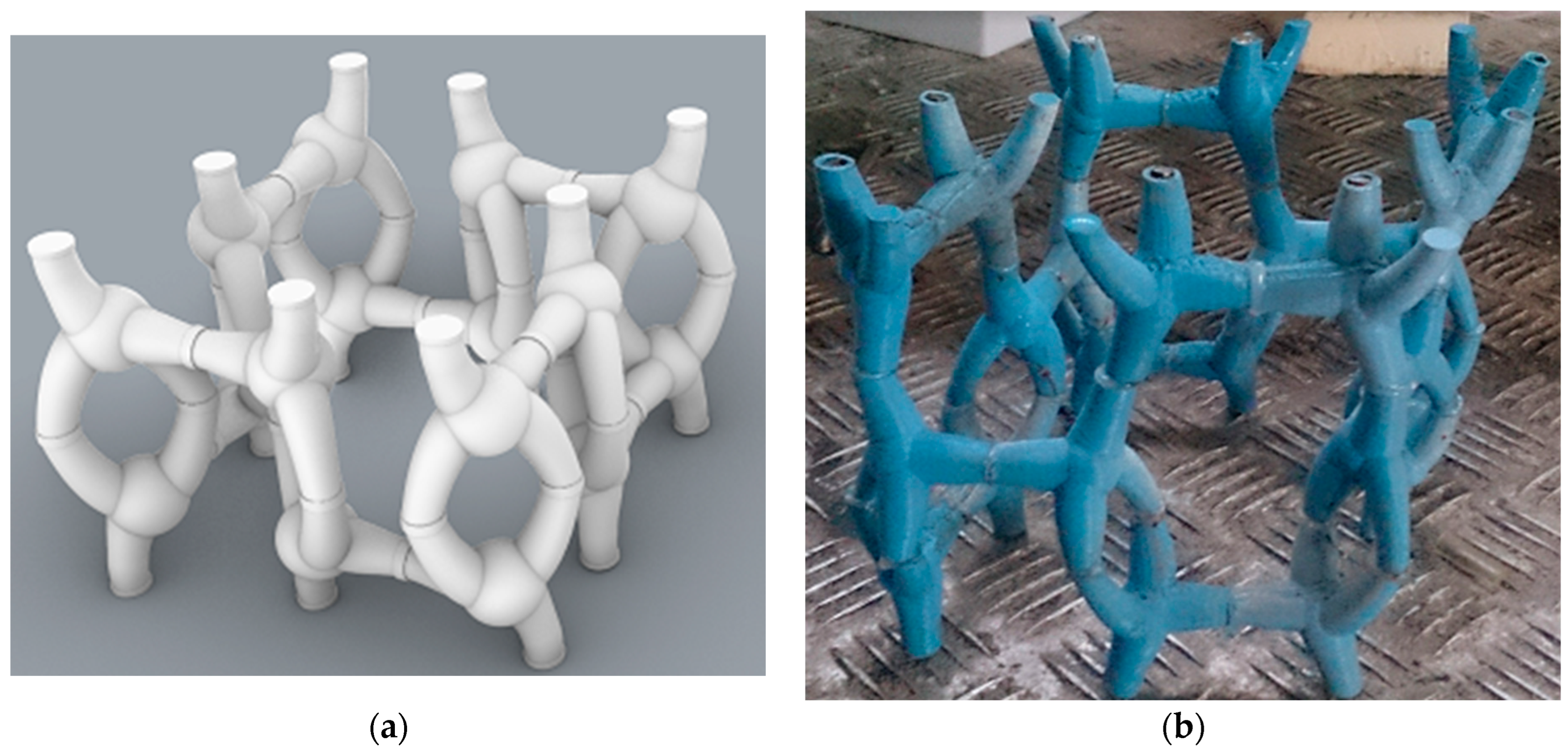
3.2. Second MFAR Prototyping
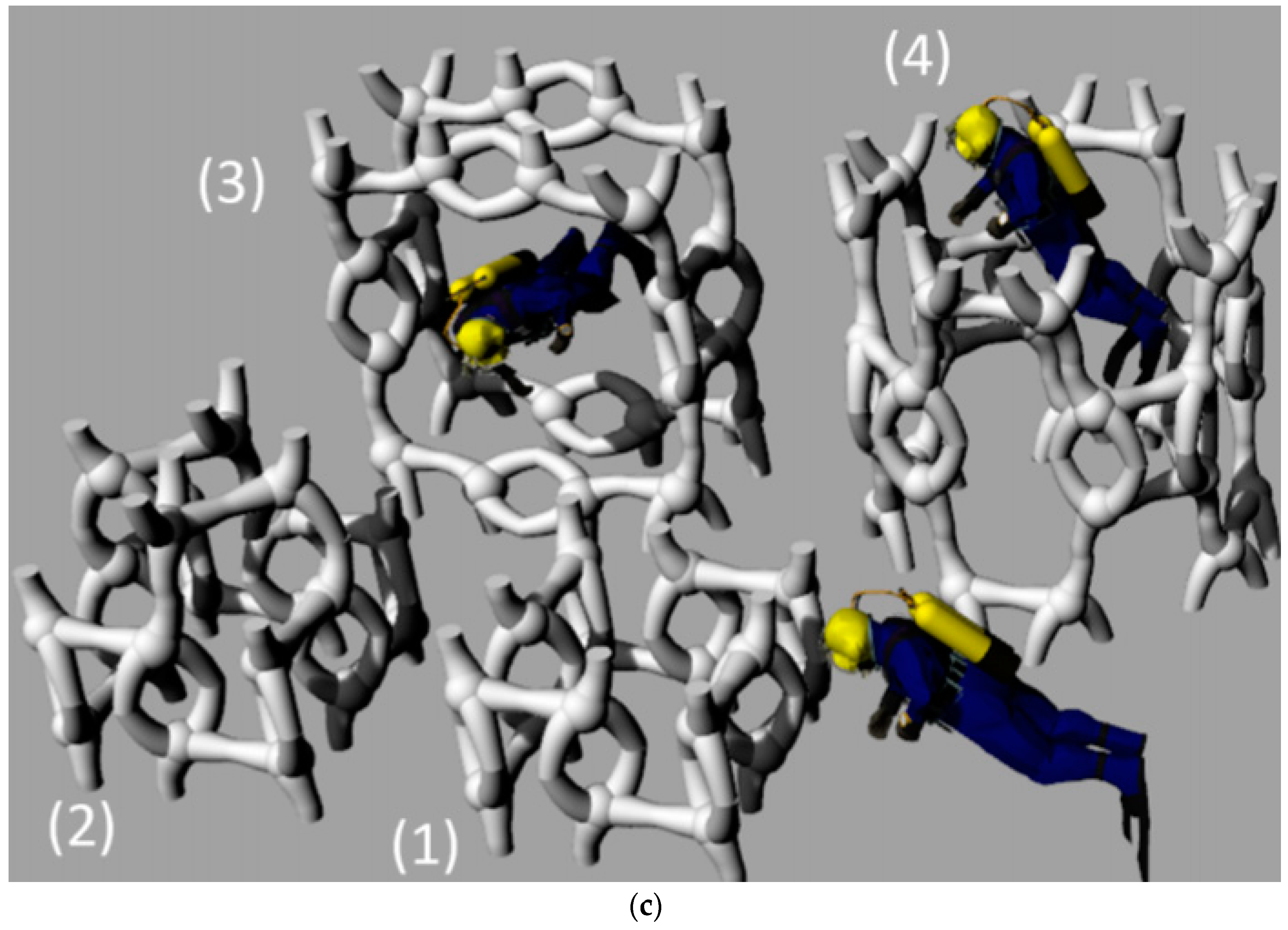
- Assembly (1): consists of a two levels arrangement, depicting a parallelogram shape in the horizontal plane;
- Assembly (2): is essentially similar to assembly (1), but two additional modules have been included at the top of the two base levels, increasing the niche volume and complexity with just a couple of additional units;
- Assembly (3): consists of an arrangement that was optimized for divers to be able to enter the structure and navigate through it, like a cavity or a square “window”;
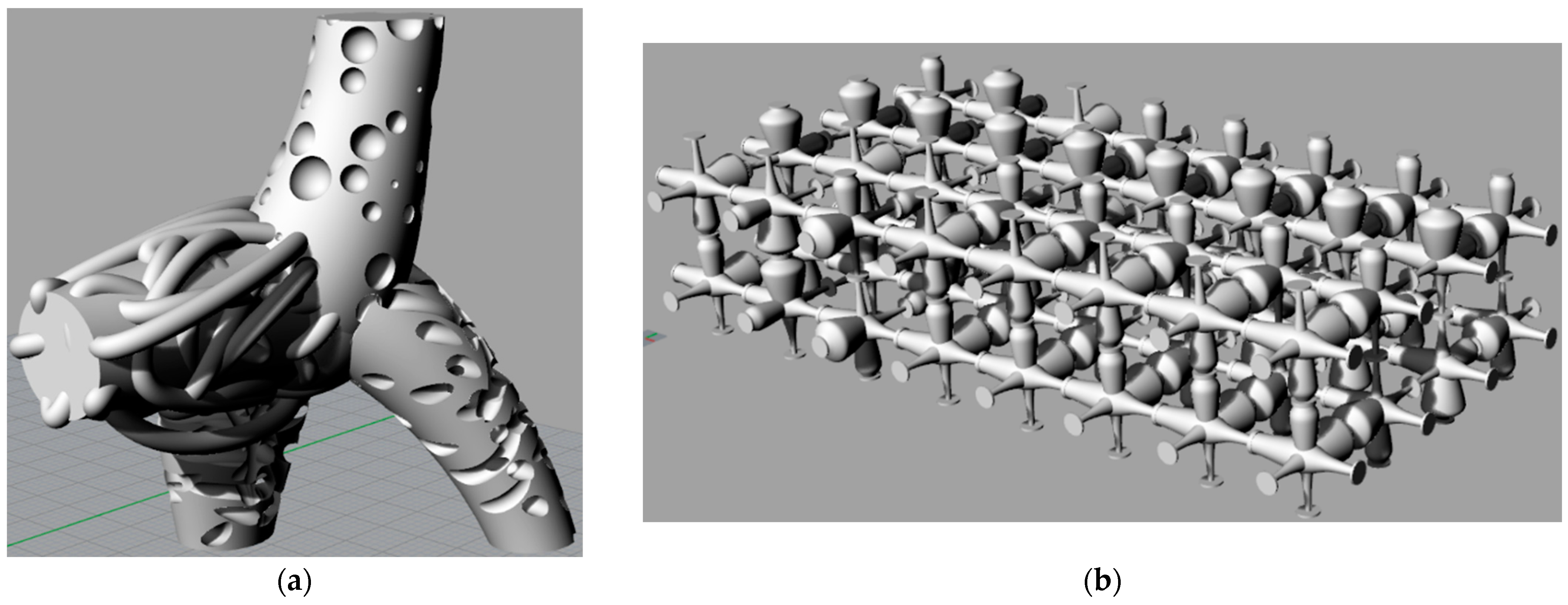
- Assembly (4): represents the arrangement of a reticulated and vertically expanded structure, which in a horizontal projection has a circular shape; this arrangement maximizes the 3D sheltering effect while still allowing for easy diver access. It may also induce upwelling effects and change sediment settling, as found in preliminary studies carried out with prototypes in a hydraulic flume, described in [81,82].
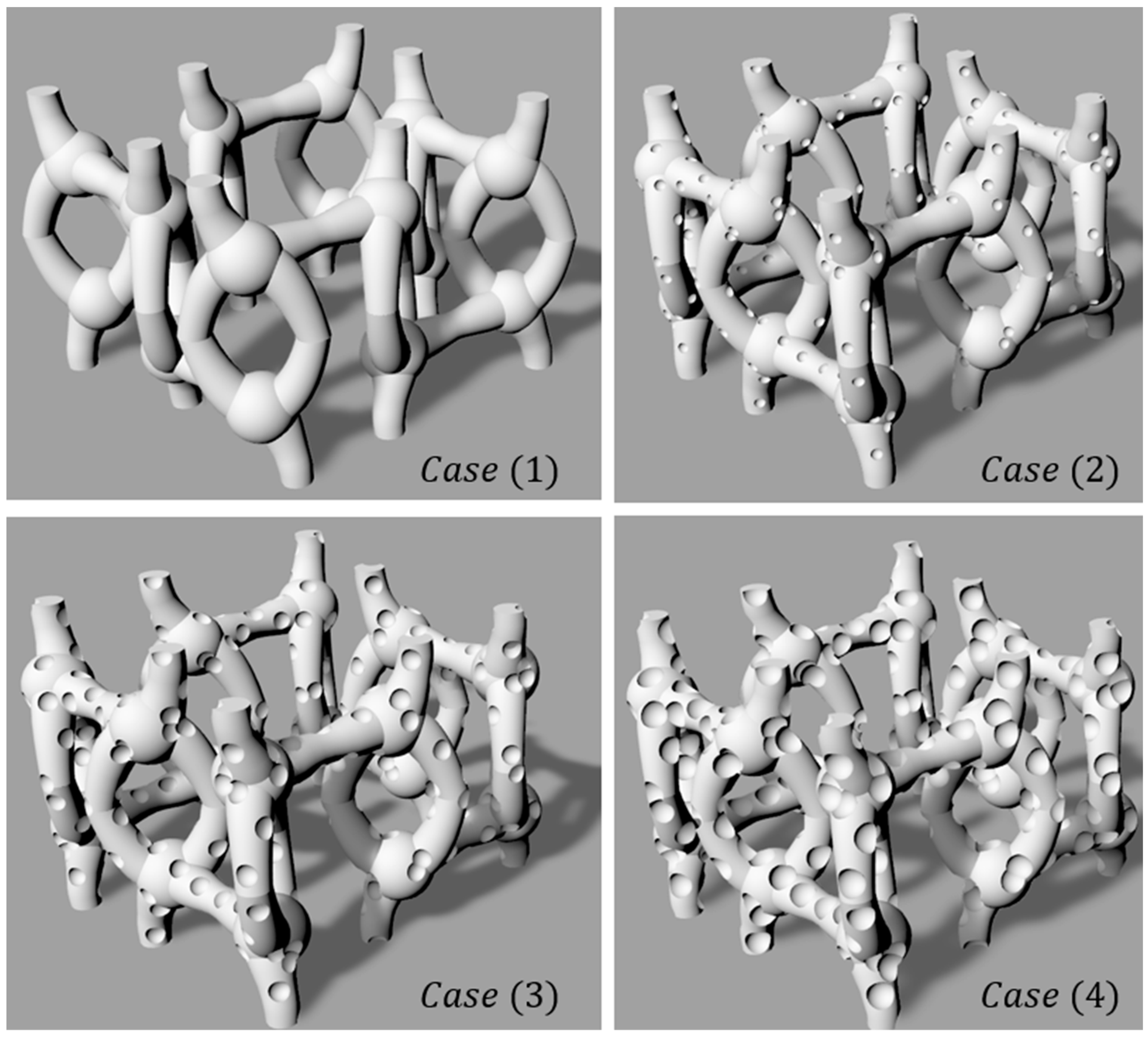
3.3. Modifiable Parameters of the Digital Design Model
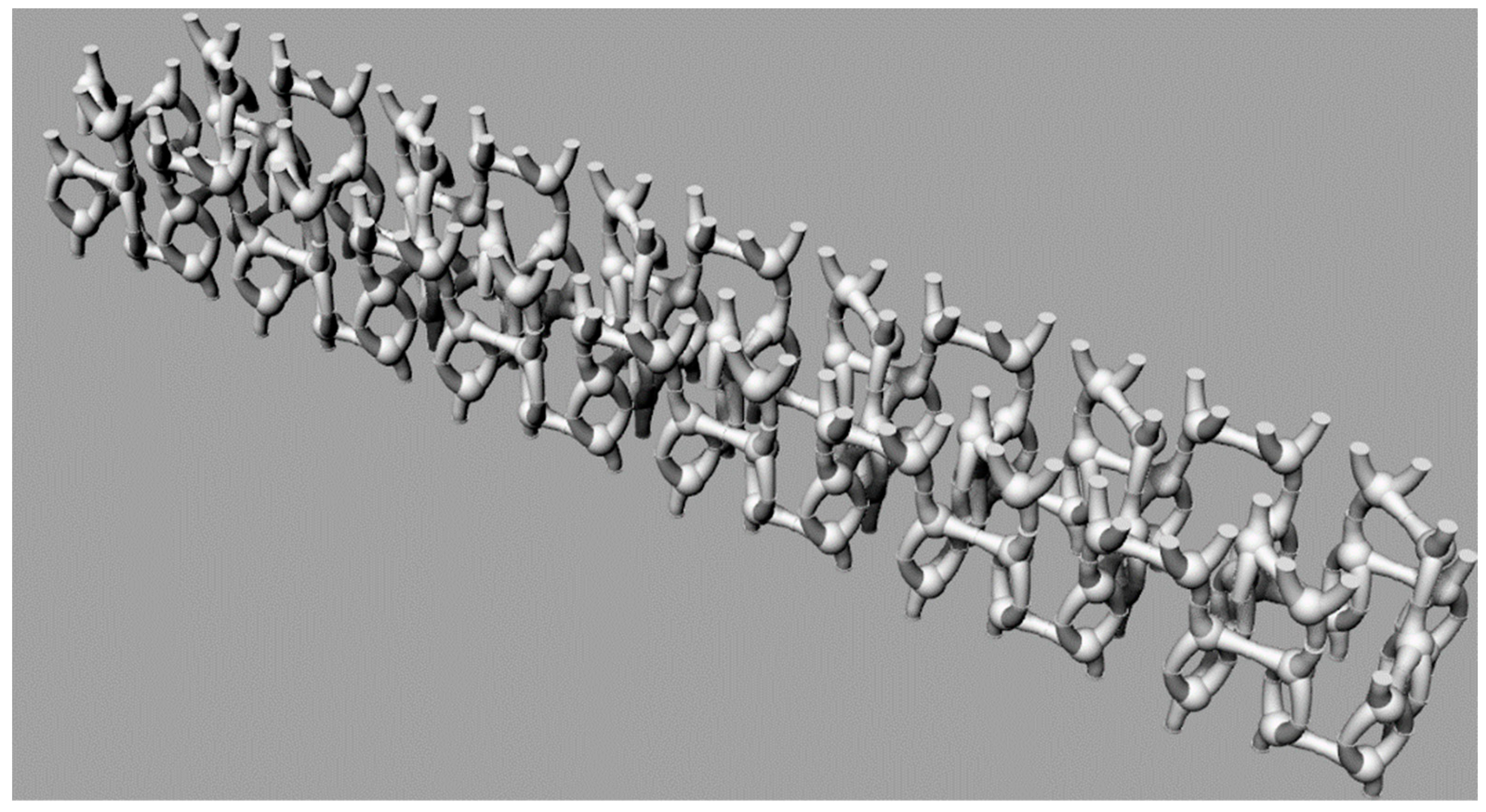
3.4. Application of the Designed MFAR within the MPA
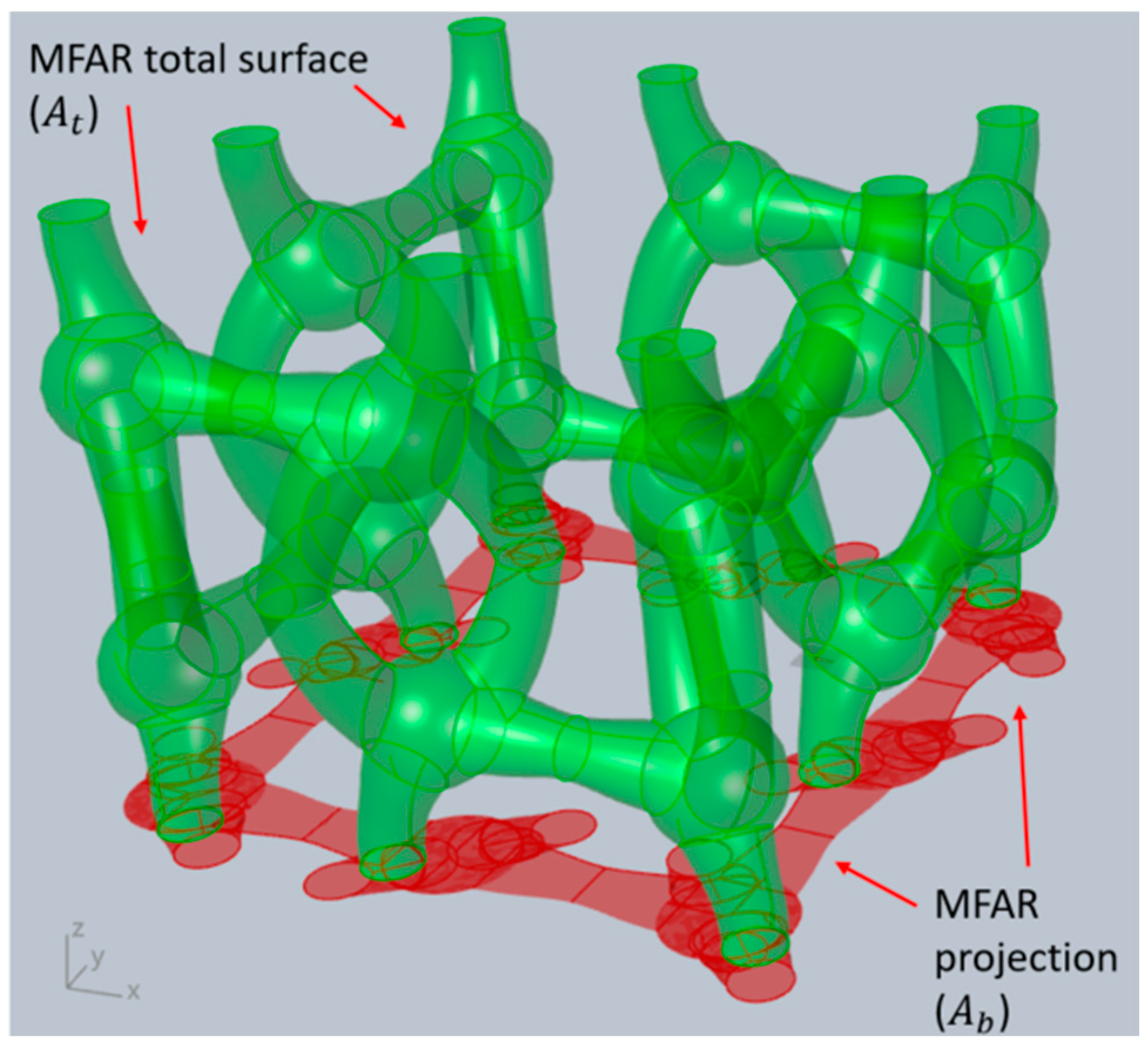
3.5. Performance Indicators
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bortone, S.A. A Perspective of Artificial Reef Research: The Past, Present, and Future. Bull. Mar. Sci. 2006, 78, 1–8. [Google Scholar]
- Lima, J.S.; Zalmon, I.R.; Love, M. Overview and Trends of Ecological and Socioeconomic Research on Artificial Reefs. Mar. Environ. Res. 2019, 145, 81–96. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.O.; Otake, S.; Kim, J.K. Transition of Artificial Reefs (ARs) Research and Its Prospects. Ocean. Coast. Manag. 2018, 154, 55–65. [Google Scholar] [CrossRef]
- Bohnsack, J.A.; Sutherland, D.L. Artificial Reef Research: A Review with Recommendations for Future Priorities. Bull. Mar. Sci. 1985, 37, 11–39. [Google Scholar]
- Fabi, G.; Spagnolo, A.; Bellan-Santini, D.; Charbonnel, E.; Çiçek, B.A.; García, J.J.G.; Jensen, A.C.; Kallianiotis, A.; dos Santos, M.N. Overview on Artificial Reefs in Europe. Braz. J. Oceanogr. 2011, 59, 155–166. [Google Scholar] [CrossRef]
- Santos, M.N.; Monteiro, C.C. The Olhao Artificial Reef System (South Portugal): Fish Assemblages and Fishing Yield. Fish. Res. 1997, 30, 33–41. [Google Scholar] [CrossRef]
- Charbonnel, E.; Bachet, F. Artificial Reefs in the Cote Bleue Marine Park: Assessment after 25 Years of Experiments and Scientific Monitoring. In Global Change: Mankind-Marine Environment Interactions; Springer: Dordrecht, The Netherlands, 2010; pp. 73–79. [Google Scholar]
- Toledo, M.I.; Torres, P.; Díaz, C.; Zamora, V.; López, J.; Olivares, G. Ecological Succession of Benthic Organisms on Niche-Type Artificial Reefs. Ecol. Process 2020, 9, 38. [Google Scholar] [CrossRef]
- Goreau, T.; Prong, P. Biorock Electric Reefs Grow Back Severely Eroded Beaches in Months. J. Mar. Sci. Eng. 2017, 5, 48. [Google Scholar] [CrossRef]
- Hong, S.; Choi, Y.; Kim, T.; Lee, G.S.; Hur, D.S.; Kwon, S. The Enhanced Mitigation of Coastal Erosion Using the Artificial Coral Reefs. J. Coast. Res. 2019, 91, 11–15. [Google Scholar] [CrossRef]
- Kim, I.; Kim, J.; Nam, J.; Song, D.; Lee, H. Changes in the Behavioral Characteristics of the Gangmun and Anmok Beaches Following the Construction of Artificial Reefs. J. Coast. Res. 2019, 91, 26–30. [Google Scholar] [CrossRef]
- Flanigan, C.; Marrin, D.L. Sculpture and Coral Reefs: Combining Art, Research, Tourism and Education. ESS Open Arch. 2020. [Google Scholar] [CrossRef]
- Belhassen, Y.; Rousseau, M.; Tynyakov, J.; Shashar, N. Evaluating the Attractiveness and Effectiveness of Artificial Coral Reefs as a Recreational Ecosystem Service. J. Environ. Manag. 2017, 203, 448–456. [Google Scholar] [CrossRef]
- Fletcher, S.; Bateman, P.; Emery, A. The Governance of the Boscombe Artificial Surf Reef, UK. Land Use Policy 2011, 28, 395–401. [Google Scholar] [CrossRef]
- Do Carmo, J.S.A.; Ten Voorde, M.; Neves, M.G. Enhancing Submerged Coastal Constructions by Incorporating Multifunctional Purposes. J. Coast. Conserv. 2011, 15, 531–546. [Google Scholar] [CrossRef]
- Mead, S.T.; Blenkinsopp, C.; Moores, A.; Borrero, J. Design and Construction of the Boscombe Multi-Purpose Reef. Coast. Eng. Proc. 2011, 1, 58. [Google Scholar] [CrossRef]
- Mendonça, A.; Fortes, C.J.; Capitão, R.; da Graça Neves, M.; Moura, T.; Do Carmo, J.S.A. Wave Hydrodynamics around a Multi-Functional Artificial Reef at Leirosa. J. Coast. Conserv. 2012, 16, 543–553. [Google Scholar] [CrossRef]
- Evans, A.J.; Garrod, B.; Firth, L.B.; Hawkins, S.J.; Morris-Webb, E.S.; Goudge, H.; Moore, P.J.M. Stakeholder Priorities for Multi-Functional Coastal Defence Developments and Steps to Effective Implementation. Mar. Policy 2017, 75, 143–155. [Google Scholar] [CrossRef]
- López, I.; Tinoco, H.; Aragonés, L.; Garcia-Barba, J. The Multifunctional Artificial Reef and Its Role in the Defence of the Mediterranean Coast. Sci. Total Environ. 2016, 550, 910–923. [Google Scholar] [CrossRef] [PubMed]
- Edwards, P.E.T.; Sutton-Grier, A.E.; Coyle, G.E. Investing in Nature: Restoring Coastal Habitat Blue Infrastructure and Green Job Creation. Mar. Policy 2013, 38, 65–71. [Google Scholar] [CrossRef]
- Arkema, K.K.; Griffin, R.; Maldonado, S.; Silver, J.; Suckale, J.; Guerry, A.D. Linking Social, Ecological, and Physical Science to Advance Natural and Nature-based Protection for Coastal Communities. Ann. N. Y. Acad. Sci. 2017, 1399, 5–26. [Google Scholar] [CrossRef] [PubMed]
- Palinkas, C.M.; Orton, P.; Hummel, M.A.; Nardin, W.; Sutton-Grier, A.E.; Harris, L.; Gray, M.; Li, M.; Ball, D.; Burks-Copes, K.; et al. Innovations in Coastline Management With Natural and Nature-Based Features (NNBF): Lessons Learned From Three Case Studies. Front. Built Environ. 2022, 8, 814180. [Google Scholar] [CrossRef]
- Schoonees, T.; Mancheño, A.G.; Scheres, B.; Bouma, T.J.; Silva, R.; Schlurmann, T.; Schüttrumpf, H. Hard Structures for Coastal Protection, Towards Greener Designs. Estuaries Coasts 2019, 42, 1709–1729. [Google Scholar] [CrossRef]
- de Vriend, H.J.; van Koningsveld, M.; Aarninkhof, S.G.J.; de Vries, M.B.; Baptist, M.J. Sustainable Hydraulic Engineering through Building with Nature. J. Hydro-Environ. Res. 2015, 9, 159–171. [Google Scholar] [CrossRef]
- Morris, R.L.; Konlechner, T.M.; Ghisalberti, M.; Swearer, S.E. From Grey to Green: Efficacy of Eco-Engineering Solutions for Nature-Based Coastal Defence. Glob. Chang. Biol. 2018, 24, 1827–1842. [Google Scholar] [CrossRef]
- Nesshöver, C.; Assmuth, T.; Irvine, K.N.; Rusch, G.M.; Waylen, K.A.; Delbaere, B.; Haase, D.; Jones-Walters, L.; Keune, H.; Kovacs, E.; et al. The Science, Policy and Practice of Nature-Based Solutions: An Interdisciplinary Perspective. Sci. Total Environ. 2017, 579, 1215–1227. [Google Scholar] [CrossRef]
- Moschella, P.S.; Abbiati, M.; Åberg, P.; Airoldi, L.; Anderson, J.M.; Bacchiocchi, F.; Bulleri, F.; Dinesen, G.E.; Frost, M.; Gacia, E.; et al. Low-Crested Coastal Defence Structures as Artificial Habitats for Marine Life: Using Ecological Criteria in Design. Coast. Eng. 2005, 52, 1053–1071. [Google Scholar] [CrossRef]
- Chapman, M.G.; Underwood, A.J. Evaluation of Ecological Engineering of “Armoured” Shorelines to Improve Their Value as Habitat. J. Exp. Mar. Biol. Ecol. 2011, 400, 302–313. [Google Scholar] [CrossRef]
- Narayan, S.; Beck, M.W.; Reguero, B.G.; Losada, I.J.; Van Wesenbeeck, B.; Pontee, N.; Sanchirico, J.N.; Ingram, J.C.; Lange, G.M.; Burks-Copes, K.A. The Effectiveness, Costs and Coastal Protection Benefits of Natural and Nature-Based Defences. PLoS ONE 2016, 11, e0154735. [Google Scholar] [CrossRef]
- Komyakova, V.; Jaffrés, J.B.D.; Strain, E.M.A.; Cullen-Knox, C.; Fudge, M.; Langhamer, O.; Bender, A.; Yaakub, S.M.; Wilson, E.; Allan, B.J.M.; et al. Conceptualisation of Multiple Impacts Interacting in the Marine Environment Using Marine Infrastructure as an Example. Sci. Total Environ. 2022, 830, 154748. [Google Scholar] [CrossRef]
- Fonseca, M.S.; Cahalan, J.A. A Preliminary Evaluation of Wave Attenuation by Four Species of Seagrass. Estuar. Coast. Shelf Sci. 1992, 35, 565–576. [Google Scholar] [CrossRef]
- Bradley, K.; Houser, C. Relative Velocity of Seagrass Blades: Implications for Wave Attenuation in Low-Energy Environments. J. Geophys. Res. Earth Surf. 2009, 114. [Google Scholar] [CrossRef]
- Coombes, M.A.; La Marca, E.C.; Naylor, L.A.; Thompson, R.C. Getting into the Groove: Opportunities to Enhance the Ecological Value of Hard Coastal Infrastructure Using Fine-Scale Surface Textures. Ecol. Eng. 2015, 77, 314–323. [Google Scholar] [CrossRef]
- Firth, L.B.; Thompson, R.C.; Bohn, K.; Abbiati, M.; Airoldi, L.; Bouma, T.J.; Bozzeda, F.; Ceccherelli, V.U.; Colangelo, M.A.; Evans, A.; et al. Between a Rock and a Hard Place: Environmental and Engineering Considerations When Designing Coastal Defence Structures. Coast. Eng. 2014, 87, 122–135. [Google Scholar] [CrossRef]
- Jackson, A.; Tomlinson, R.; Corbett, B.; Strauss, D. Long Term Performance of a Submerged Coastal Control Structure: A Case Study of the Narrowneck Multi-Functional Artificial Reef. Coast. Eng. Proc. 2012, 1, 54. [Google Scholar] [CrossRef]
- Ng, K.; Thomas, T.; Phillips, M.R.; Calado, H.; Borges, P.; Veloso-Gomes, F. Multifunctional Artificial Reefs for Small Islands: An Evaluation of Amenity and Opportunity for Sao Miguel Island, the Azores. Prog. Phys. Geogr. 2015, 39, 220–257. [Google Scholar] [CrossRef]
- MARS-Modular Artificial Reef Structure. Available online: https://www.reefdesignlab.com/ (accessed on 15 February 2024).
- Engler, E. Modular Artificial Reef Sea Wall and Marine Habitat. US Patent 6,896,445B1, 24 May 2005. [Google Scholar]
- Pinheiro, M.; Marisa, T.; Pereira, E.; Valente, I.; Cruz, F.; Maslov, D. Application of Geostatistical Techniques to Support Data Acquisition and Predict Maritime Variables. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, OCEAN 2018, North Charleston, SC, USA, 22–25 October 2018. [Google Scholar]
- Pinheiro, M.; Miranda, T.; Ferreira, V.; Pereira, E.; Valente, I.; Cruz, F.; Maslov, D. From Decision-Making to Oceans Accounts: A Case Study. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- James, B.G. Exploring the Emerging Design Territory of Construction 3D Printing—Project Led Architectural Research. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2011. [Google Scholar]
- Mendoza, E.; Ríos, A.; Mariño-Tapia, I.; Silva, R. Modular Coral Shaped Artificial Reefs Acting as Beach Protection Barriers. In Coastal Structures; Bundesanstalt für Wasserbau: Karlsruhe, Germany, 2019. [Google Scholar] [CrossRef]
- Nakamura, M. Evolution of Artificial Fishing Reef Concepts in Japan. Bull. Mar. Sci. 1985, 37, 271–278. [Google Scholar]
- Spanier, E.; Lavalli, L.; Edelist, D. Artificial Habitats for Benthic Dwelling Lobsters-Analysis of 5 Decades of Research. J. Mar. Biol. Assoc. India 2010, 52, 113–138. [Google Scholar]
- Lipcius, R.N.; Burke, R.P. Abundance, Biomass and Size Structure of Eastern Oyster and Hooked Mussel on a Modular Artificial Reef in the Rappahannock River, Chesapeake Bay; Virginia Institute of Marine Science, College of William and Mary: Gloucester Point, VA, USA, 2006. [Google Scholar]
- Hensel, E.; Allgeier, J.E.; Layman, C.A. Effects of Predator Presence and Habitat Complexity on Reef Fish Communities in The Bahamas. Mar. Biol. 2019, 166, 136. [Google Scholar] [CrossRef]
- Fitzhardinge, R.C.; Bailey-Brock, J.H. Colonization of Artificial Reef Materials by Corals and Other Sessile Organisms. Bull. Mar. Sci. 1989, 44, 567–579. [Google Scholar]
- Oren, U.; Benayahu, Y. Transplantation of Juvenile Corals: A New Approach for Enhancing Colonization of Artificial Reefs. Mar. Biol. 1997, 127, 499–505. [Google Scholar] [CrossRef]
- Warren, D.J.; Warren, D.T. Integrated Reef Building System. US Patent 5,803,660, 8 September 1998. [Google Scholar]
- Sutton-Grier, A.E.; Wowk, K.; Bamford, H. Future of Our Coasts: The Potential for Natural and Hybrid Infrastructure to Enhance the Resilience of Our Coastal Communities, Economies and Ecosystems. Environ. Sci. Policy 2015, 51, 137–148. [Google Scholar] [CrossRef]
- Ng, K.; Phillips, M.R.; Calado, H.; Borges, P.; Veloso-Gomes, F. Seeking Harmony in Coastal Development for Small Islands: Exploring Multifunctional Artificial Reefs for São Miguel Island, the Azores. Appl. Geogr. 2013, 44, 99–111. [Google Scholar] [CrossRef]
- Lawson, C.R. Geotextiles in Marine Engineering. In Geotextiles: From Design to Applications; Woodhead Publishing: Cambridge, UK, 2016; pp. 435–482. [Google Scholar] [CrossRef]
- Kirkbride-Smith, A.E.; Wheeler, P.M.; Johnson, M.L. The Relationship between Diver Experience Levels and Perceptions of Attractiveness of Artificial Reefs-Examination of a Potential Management Tool. PLoS ONE 2013, 8, e68899. [Google Scholar] [CrossRef] [PubMed]
- Encarnação, J.; Calado, G. Effects of Recreational Diving on Early Colonization Stages of an Artificial Reef in North-East Atlantic. J. Coast. Conserv. 2018, 22, 1209–1216. [Google Scholar] [CrossRef]
- Dowling, R.K.; Nichol, J. The HMAS Swan Artificial Diving Reef. Ann. Tour. Res. 2001, 28, 226–229. [Google Scholar] [CrossRef]
- Taylor, J.C.; McCormick, C.; Scales, H. The Underwater Museum: The Submerged Sculptures of Jason DeCaires Taylor; Chronicle Books: San Francisco, CA, USA, 2014. [Google Scholar]
- Spence, H.R. Bioacoustic Monitoring Station in Underwater Sculpture. J. Acoust. Soc. Am. 2017, 141, 3947. [Google Scholar] [CrossRef]
- Nagel, J.; Schmidt, L.; Born, W. Establishing Analogy Categories for Bio-Inspired Design. Designs 2018, 2, 47. [Google Scholar] [CrossRef]
- Perkol-Finkel, S.; Shashar, N.; Benayahu, Y. Can Artificial Reefs Mimic Natural Reef Communities? The Roles of Structural Features and Age. Mar. Environ. Res. 2006, 61, 121–135. [Google Scholar] [CrossRef]
- Berman, O.; Weizman, M.; Oren, A.; Neri, R.; Parnas, H.; Shashar, N.; Tarazi, E. Design and Application of a Novel 3D Printing Method for Bio-Inspired Artificial Reefs. Ecol. Eng. 2023, 188, 106892. [Google Scholar] [CrossRef]
- Chou, L.M. Artificial Reefs of Southeast Asia—Do They Enhance or Degrade the Marine Environment? Environ. Monit. Assess. 1997, 44, 45–52. [Google Scholar] [CrossRef]
- Kaiser, M.J. The Louisiana Artificial Reef Program. Mar. Policy 2006, 30, 605–623. [Google Scholar] [CrossRef]
- Campos, J.A.; Gamboa, C. An Artificial Tire-Reef in a Tropical Marine System: A Management Tool. Bull. Mar. Sci. 1989, 44, 757–766. [Google Scholar]
- Patterson, W.F.; Cowan, J.; Wilson, C.A.; Shipp, R.L. Age and Growth of Red Snapper, Lutjanus Campechanus, from an Artificial Reef Area off Alabama in the Northern Gulf of Mexico. Fish. Bull. 2001, 99, 617–627. [Google Scholar]
- Holzer, D.; Tang, J.; Xie, Y.; Burry, M. Evolutionary Structural Optimisation and Parametric Design in Transdisciplinary Collaboration. In Innovations in Structural Engineering and Construction; Taylor and Francis: Boca Raton, FL, USA, 2008; pp. 851–856. [Google Scholar]
- Mohammed, J.S. Applications of 3D Printing Technologies in Oceanography. Methods Oceanogr. 2016, 17, 97–117. [Google Scholar] [CrossRef]
- Berman, O.; Levy, N.; Parnas, H.; Levy, O.; Tarazi, E. Exploring New Frontiers in Coral Nurseries: Leveraging 3D Printing Technology to Benefit Coral Growth and Survival. J. Mar. Sci. Eng. 2023, 11, 1695. [Google Scholar] [CrossRef]
- Carr, M.H.; Hixon, M.A. Artificial Reefs: The Importance of Comparisons with Natural Reefs. Fisheries 1997, 22, 28–33. [Google Scholar] [CrossRef]
- Lemoine, H.R.; Paxton, A.B.; Anisfeld, S.C.; Rosemond, R.C.; Peterson, C.H. Selecting the Optimal Artificial Reefs to Achieve Fish Habitat Enhancement Goals. Biol. Conserv. 2019, 238, 108200. [Google Scholar] [CrossRef]
- Zavoleas, Y.; Haeusler, M. Extended Modelling-Dynamic Approaches Applied to Design Reef Habitats at Sydney Harbour. In ShoCK!—Sharing Computational Knowledge!—Proceedings of the 35th eCAADe Conference, Rome, Italy, 20–22 September 2017; eCAADe (Education and Research in Computer Aided Architectural Design in Europe) and Dep. of Civil, Building and Environmental Engineering, Faculty of Civil and Industrial Engineering, Sapienza University of Rome: Rome, Italy, 2017; pp. 67–74. [Google Scholar] [CrossRef]
- Whalan, S.; Abdul Wahab, M.A.; Sprungala, S.; Poole, A.J.; de Nys, R. Larval Settlement: The Role of Surface Topography for Sessile Coral Reef Invertebrates. PLoS ONE 2015, 10, e0117675. [Google Scholar] [CrossRef]
- Levenstein, M.A.; Gysbers, D.J.; Marhaver, K.L.; Kattom, S.; Tichy, L.; Quinlan, Z.; Tholen, H.M.; Wegley Kelly, L.; Vermeij, M.J.A.; Wagoner Johnson, A.J.; et al. Millimeter-Scale Topography Facilitates Coral Larval Settlement in Wave-Driven Oscillatory Flow. PLoS ONE 2022, 17, e0274088. [Google Scholar] [CrossRef]
- Kupfner Johnson, S.; Hallock, P. A Review of Symbiotic Gorgonian Research in the Western Atlantic and Caribbean with Recommendations for Future Work. Coral Reefs 2020, 39, 239–258. [Google Scholar] [CrossRef]
- Panero, M.; Galbraith, G.F.; Srinivasan, M.; Jones, G.P. Roles of Depth, Current Speed, and Benthic Cover in Shaping Gorgonian Assemblages at the Palm Islands (Great Barrier Reef). Coral Reefs 2023, 42, 1045–1057. [Google Scholar] [CrossRef]
- May, P.; Mendy, G.; Tallett, P. Structural Integrity Monitoring: Review and Appraisal of Current Technologies for Offshore Applications; Atkins Limited: Epsom, UK, 2009. [Google Scholar]
- Wang, P.; Tian, X.; Peng, T.; Luo, Y. A Review of the State-of-the-Art Developments in the Field Monitoring of Offshore Structures. Ocean Eng. 2018, 147, 148–164. [Google Scholar] [CrossRef]
- Maslov, D.; Pereira, E.; Miranda, T.; Valente, M.; Cruz, F.; Pinheiro, M. Innovative Monitoring Strategies for Multifunctional Artificial Reefs. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, OCEAN 2018, North Charleston, SC, USA, 22–25 October 2018. [Google Scholar]
- Shani, A.; Polak, O.; Shashar, N. Artificial Reefs and Mass Marine Ecotourism. Tour. Geogr. 2012, 14, 361–382. [Google Scholar] [CrossRef]
- Beeby, S.P.; Tudor, M.J.; White, N.M. Energy Harvesting Vibration Sources for Microsystems Applications. Meas. Sci. Technol. 2006, 17, R175. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Deng, Z.D. Energy Harvesting from Low Frequency Applications Using Piezoelectric Materials. Appl. Phys. Rev. 2014, 1, 41301. [Google Scholar] [CrossRef]
- Maslov, D.; Johnson, J.; Pereira, E.; Duarte, D.; Miranda, T.; Lima, M.; Cruz, F.; Valente, I.; Pinheiro, M. Experimental Testing and CFD Modelling for Prototype Design of Innovative Artificial Reef Structures. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar]
- Cruz, F.; Pereira, E.; Lima, M.; Johnson, J.; Duarte, D.; Valente, I.B.; Miranda, T.; Maslov, D.; Pinheiro, M. Experimental Characterization of the Scour of Innovative Artificial Reef Prototypes Using Hydraulic Flume and Photogrammetry. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Fabio, C.; Eduardo, P.; Valente, I.B.; Tiago, M.; Maslov, D.; Pinheiro, M. Structural Design of an Innovative Multifunctional Artificial Reef. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, OCEAN 2018, North Charleston, SC, USA, 22–25 October 2018. [Google Scholar]
- Frazer, T.K.; Lindberg, W.J. Refuge Spacing Similarly Affects Reef-Associated Species from Three Phyla. Bull. Mar. Sci. 1994, 55, 388–400. [Google Scholar]
- Langhamer, O.; Wilhelmsson, D. Colonisation of Fish and Crabs of Wave Energy Foundations and the Effects of Manufactured Holes—A Field Experiment. Mar. Environ. Res. 2009, 68, 151–157. [Google Scholar] [CrossRef]
- Kim, C.G.; Lee, J.W.; Park, J.S. Artificial Reef Designs for Korean Coastal Waters. Bull. Mar. Sci. 1994, 55, 858–866. [Google Scholar]
- Maslov, D.; Pereira, E.; Duarte, D.; Miranda, T.; Ferreira, V.; Tieppo, M.; Cruz, F.; Johnson, J. Numerical Analysis of the Flow Field and Cross Section Design Implications in a Multifunctional Artificial Reef. Ocean Eng. 2023, 272, 113817. [Google Scholar] [CrossRef]
- Saleh, E.; Geng, C.N.; Kiat, Y.T.; Isnain, I. Effect of Artificial Structures on Shoreline Profile of Selingan Island, Sandakan, Sabah, Malaysia. Borneo J. Mar. Sci. Aquac. BJoMSA 2018, 2, 9–15. [Google Scholar] [CrossRef]
- Stolk, P.; Markwell, K.; Jenkins, J. Perceptions of Artificial Reefs as Scuba Diving Resources: A Study of Australian Recreational Scuba Divers. Ann. Leis. Res. 2013, 8, 153–166. [Google Scholar] [CrossRef]
- Stolk, P.; Markwell, K.; Jenkins, J.M. Artificial Reefs as Recreational Scuba Diving Resources: A Critical Review of Research. J. Sustain. Tour. 2009, 15, 331–350. [Google Scholar] [CrossRef]
- Kim, D.; Woo, J.; Yoon, H.S.; Na, W.B. Efficiency, Tranquillity and Stability Indices to Evaluate Performance in the Artificial Reef Wake Region. Ocean Eng. 2016, 122, 253–261. [Google Scholar] [CrossRef]
- Lee, I.-C.; Kim, D.; Jung, S.; Na, W.-B. Prediction of Primary Physical Measures for Cost-Effective Management of Artificial Seaweed Reefs. Mar. Technol. Soc. J. 2020, 54, 25–43. [Google Scholar] [CrossRef]
- Kim, M.; Jung, S.; Van Chau, T.; Na, W.-B. Correlation of the Structural Characteristics of an Artificial Oyster Reef with Its Wake Region. J. Mar. Sci. Eng. 2023, 11, 775. [Google Scholar] [CrossRef]
- Jung, S.; Na, W.-B.; Kim, D. Rugosity and Blocking Indices of Artificial Reefs and Their Correlations with Wake Volume. Ocean Eng. 2022, 261, 112204. [Google Scholar] [CrossRef]
- Vivier, B.; Dauvin, J.C.; Navon, M.; Rusig, A.M.; Mussio, I.; Orvain, F.; Boutouil, M.; Claquin, P. Marine Artificial Reefs, a Meta-Analysis of Their Design, Objectives and Effectiveness. Glob. Ecol. Conserv. 2021, 27, e01538. [Google Scholar] [CrossRef]
- Carral, L.; Lamas, M.I.; Cartelle Barros, J.J.; López, I.; Carballo, R. Proposed Conceptual Framework to Design Artificial Reefs Based on Particular Ecosystem Ecology Traits. Biology 2022, 11, 680. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | MFAR Capability |
|---|---|
| Coastal protection | Large mass of overall assembled construction and horizontal interconnection. |
| Biodiversity restoration | Various openings between modules and irregular shape; bioreceptive concrete as a base material for reef structure. |
| Fishery enhancement | Increasing quantity and diversity of marine habitats leads to accelerating fishery enhancing. |
| Sensor platform | Sufficient availability of structure blind ends and connecting nodes between modules guaranteeing a conductive path adapted for sensors installation. |
| Energy harvesting | Spatially reticulated structure that oscillates significantly due to environmental actions. |
| Scientific research | Repeatability of the final structure and possibility to have equivalent conditions across the MFAR opens possibilities for parametric studies in marine biology, ecology, engineering, morphology etc. |
| Modules intercommunication | Metallic reinforcement and nodal connections of the MFAR serves as a communication platform between modules across the whole spatial structure. |
| Tourism encouraging | Exotic and unusual shape of assembled MFAR may lead to increased recreational activities. |
| Parameter | Type | MFAR Functionality | MFAR Characteristic Related to the Biotic or Abiotic Parameter |
|---|---|---|---|
| Marine biodiversity | Biotic | MFAR provides habitats for various marine species, promoting biodiversity restoration by offering shelter, breeding grounds, and feeding opportunities. | Higher number of cavities and higher effective surface. |
| Fish populations | MFAR enhances fish population by creating new habitats and attracting fish to areas where natural habitats may be degraded or absent. | Larger cavities and larger structures optimized for creating the upwelling. | |
| Coral growth | Artificial reefs can serve as substrates for coral larvae to settle and grow, aiding in coral reef restoration and expansion. | Higher surface roughness, higher number of small cavities. | |
| Algal coverage | Artificial reefs can influence algal growth by providing surfaces for attachment, which can both support the food web and potentially outcompete corals or other desired species if not managed. | Low curvature shapes with repeatable patterns, less or absent internal cavities and spaces. | |
| Sediment stabilization | Abiotic | Artificial reefs can stabilize sediments by reducing water flow and wave energy, preventing erosion and creating more stable environments for marine life. | Higher volume of used material on wider deployment area. |
| Light availability | Artificial reefs can create shaded areas that reduce light penetration, which can benefit certain species that require lower light levels and protect them from harmful UV radiation. | Higher number of internal cavities and low number of cavities exposed outside of the MFAR. Adopt “turtle” shaped MFAR. | |
| Recreational diving | By designing visually attractive and unusual MFAR shapes, when abundantly colonized by marine life structures they serve as a diver’s attraction. | High curvature shapes distributed on a wide area. | |
| Nutrient levels | By providing surfaces for biofilm formation and algal growth, artificial reefs can influence nutrient cycling, potentially reducing excess nutrients through biological uptake. | Higher surface roughness, higher number of small cavities. |
| Parameters | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|
| Total MFAR area, m2 | 25.17 | 26.65 | 28.68 | 30.49 |
| Bottom projection area, m2 | 4.807 | 4.802 | 4.797 | 4.791 |
| Structural complexity | 5.23 | 5.54 | 5.97 | 6.36 |
| difference | 0 | 5.9% | 14.1% | 21.6% |
| Total volume, m3 | 1.76 | 1.71 | 1.56 | 1.29 |
| Volume difference | 0 | 2.8% | 11.3% | 26.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maslov, D.; Cruz, F.; Pinheiro, M.; Miranda, T.; Valente, I.B.; Ferreira, V.; Pereira, E. Functional Conception of Biomimetic Artificial Reefs Using Parametric Design and Modular Construction. J. Mar. Sci. Eng. 2024, 12, 1682. https://doi.org/10.3390/jmse12091682
Maslov D, Cruz F, Pinheiro M, Miranda T, Valente IB, Ferreira V, Pereira E. Functional Conception of Biomimetic Artificial Reefs Using Parametric Design and Modular Construction. Journal of Marine Science and Engineering. 2024; 12(9):1682. https://doi.org/10.3390/jmse12091682
Chicago/Turabian StyleMaslov, Dmytro, Fabio Cruz, Marisa Pinheiro, Tiago Miranda, Isabel Brito Valente, Vasco Ferreira, and Eduardo Pereira. 2024. "Functional Conception of Biomimetic Artificial Reefs Using Parametric Design and Modular Construction" Journal of Marine Science and Engineering 12, no. 9: 1682. https://doi.org/10.3390/jmse12091682
APA StyleMaslov, D., Cruz, F., Pinheiro, M., Miranda, T., Valente, I. B., Ferreira, V., & Pereira, E. (2024). Functional Conception of Biomimetic Artificial Reefs Using Parametric Design and Modular Construction. Journal of Marine Science and Engineering, 12(9), 1682. https://doi.org/10.3390/jmse12091682