
Modeling and Investigation of Long-Term Performance of High-Rise Pile Cap Structures Under Scour and Corrosion





Abstract
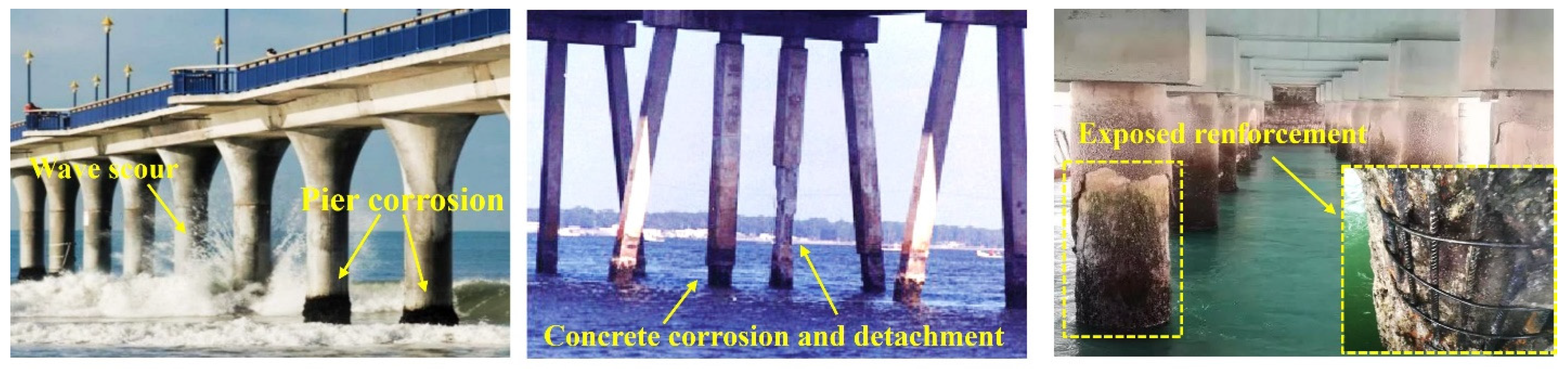
1. Introduction
2. Refined Modeling with Scour- or Corrosion-Induced Effects
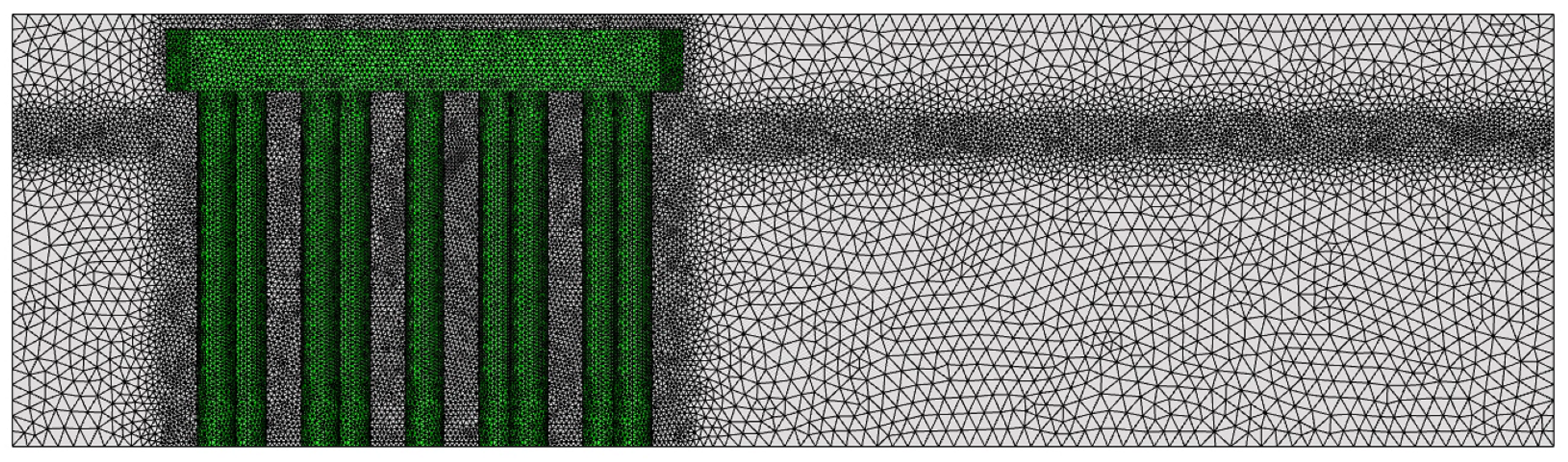
2.1. Fluid Domain Modeling
2.1.1. Governing Equations
2.1.2. Numerical Model Setup
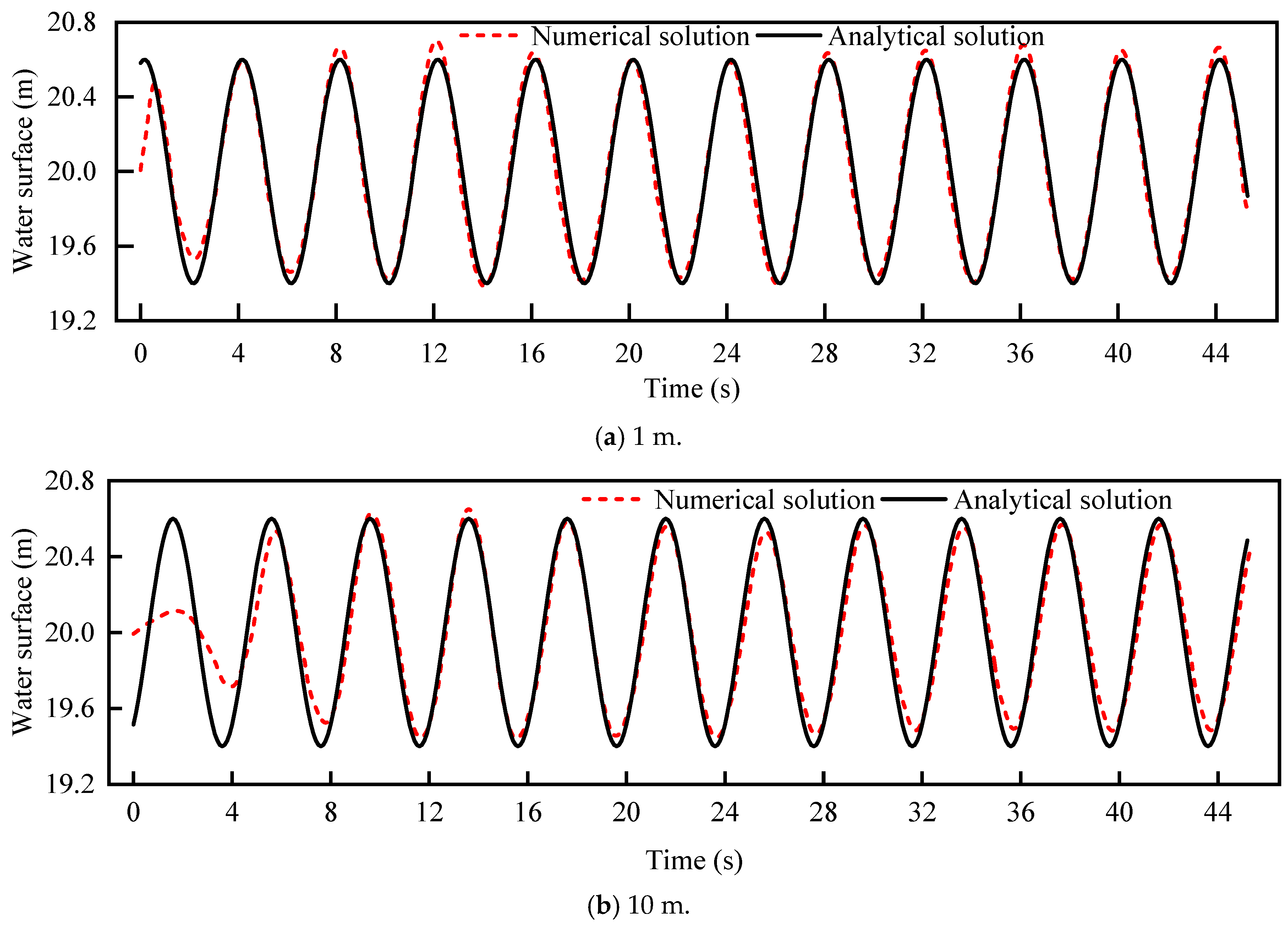
2.1.3. Numerical Wave Verification
2.2. Solid-Domain Modeling Considering Scour and Corrosion
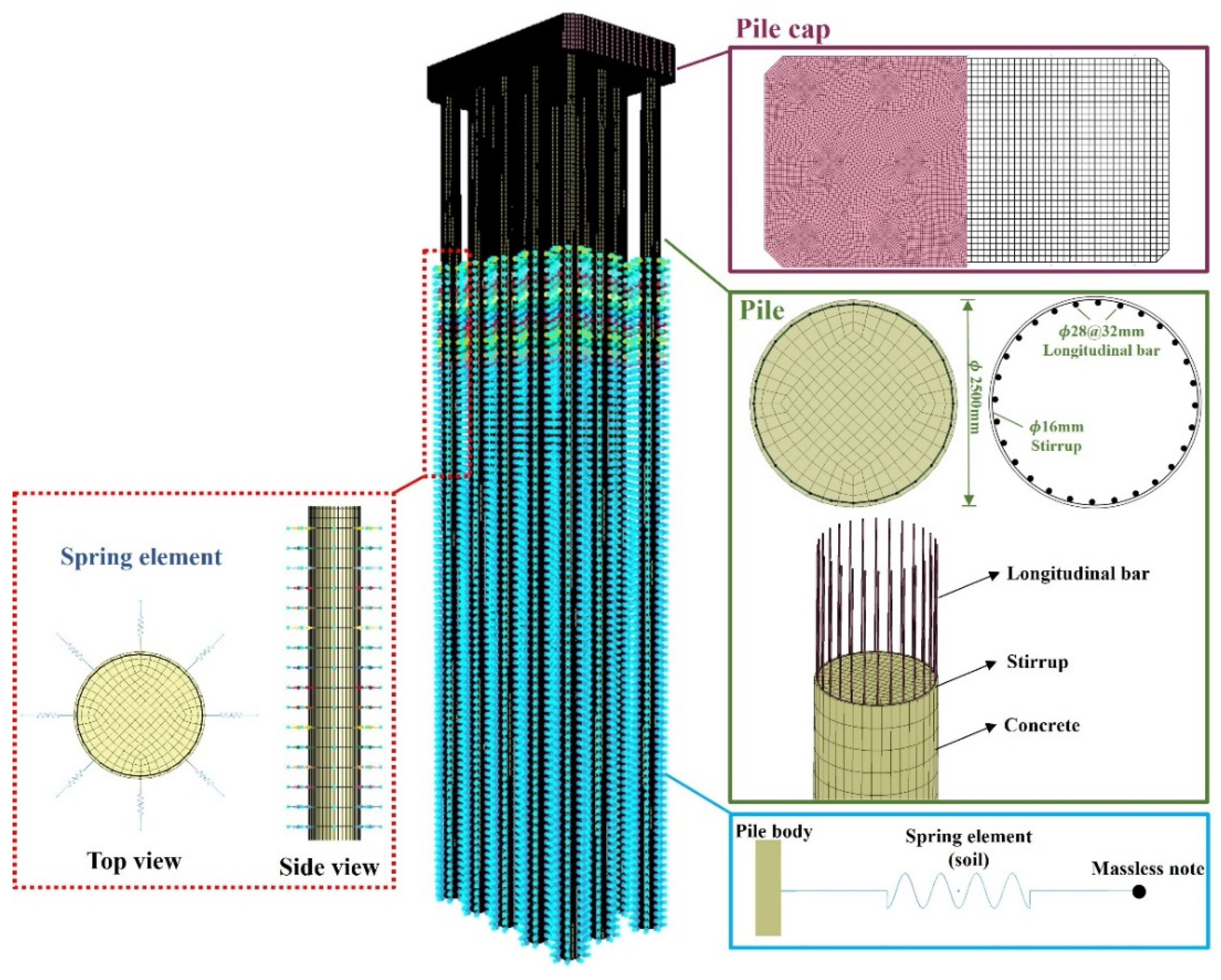
2.2.1. High-Rise Pile Cap Modeling
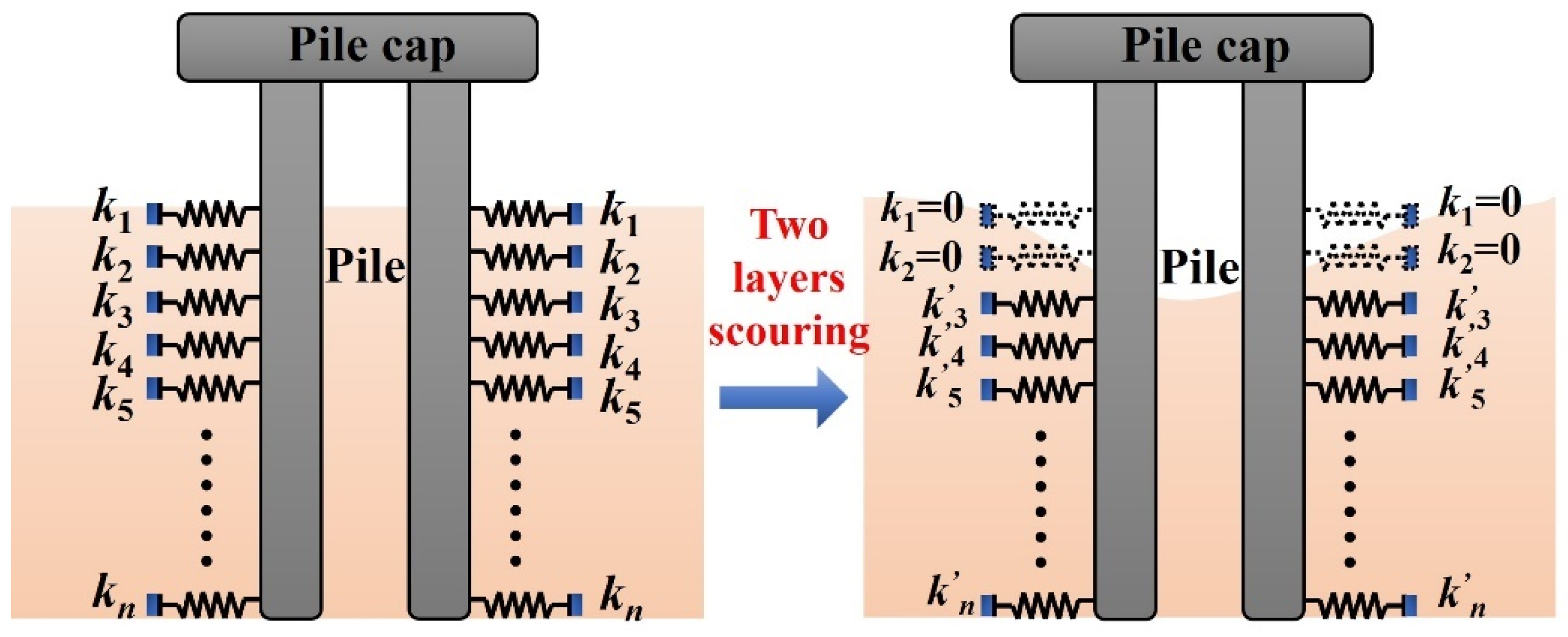
2.2.2. Pile–Soil Interaction Under Scour
2.2.3. Structural Strength Deterioration Due to Corrosion
- (1)
- Corrosion initiation time
- (2)
- Degradation of steel bar properties
- (3)
- Degradation of concrete strength
- (4)
- Case study of the high-rise pile cap
3. Numerical Simulation Results
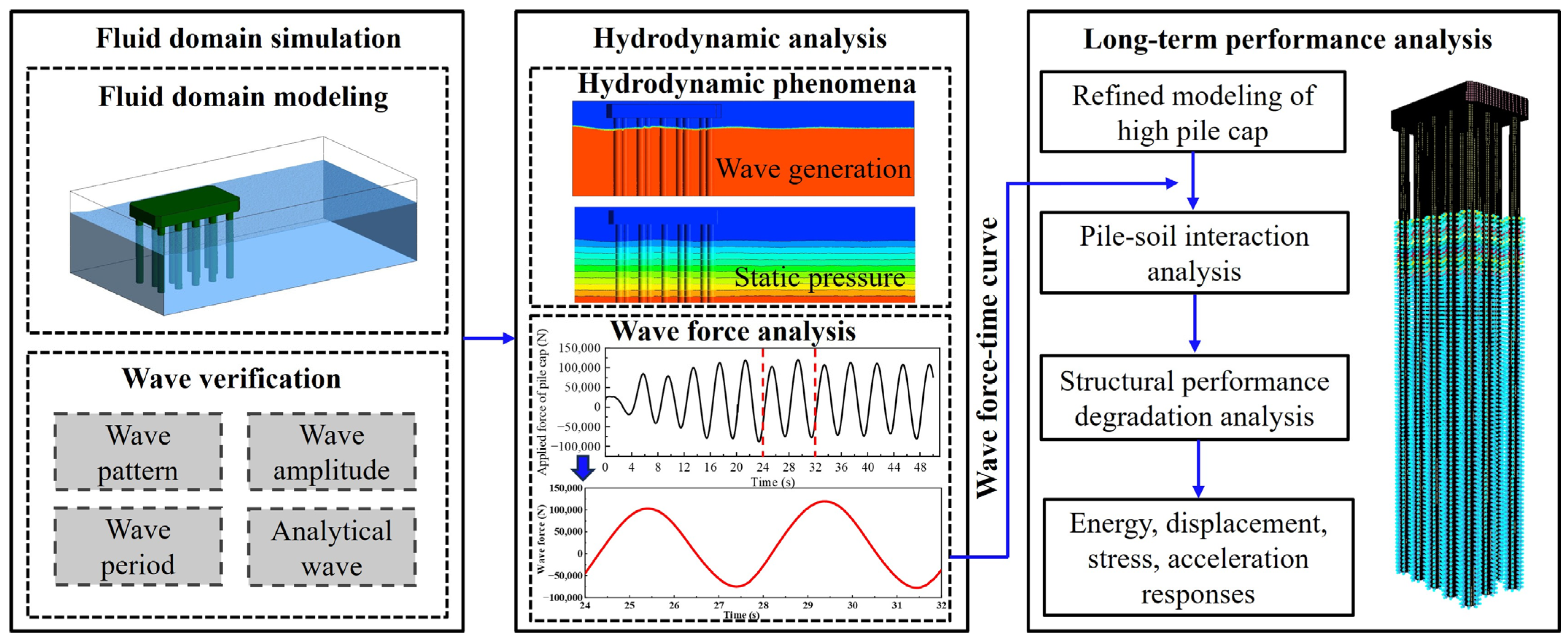
3.1. Analysis Strategy and Process
- (1)
- Conduct a hydrodynamic analysis of the high-rise pile cap using ANSYS-FLUENT software (2022 R1) and extract the resultant wave force from two cycles within the 24–32 s duration;
- (2)
- Apply the extracted resultant wave force as nodal forces to the corresponding nodes of the high-ride pile cap model established in the LS-DYNA software;
- (3)
- Consider the performance degradation indicators of concrete, steel reinforcement, and stirrups of the high-rise pile cap at service times of 8, 50, and 100 years;
- (4)
- Calculate the dynamic stiffness of nonlinear soil springs along the pile axis and simulate scour effects by varying the number of soil springs, considering scour depths of 0 m (pristine), 3 m, 6 m, 9 m, and 12 m;
- (5)
- Extract dynamic responses such as stresses and the displacements of the high-rise pile cap to analyze its failure behavior.
3.2. Hydrodynamic Analysis
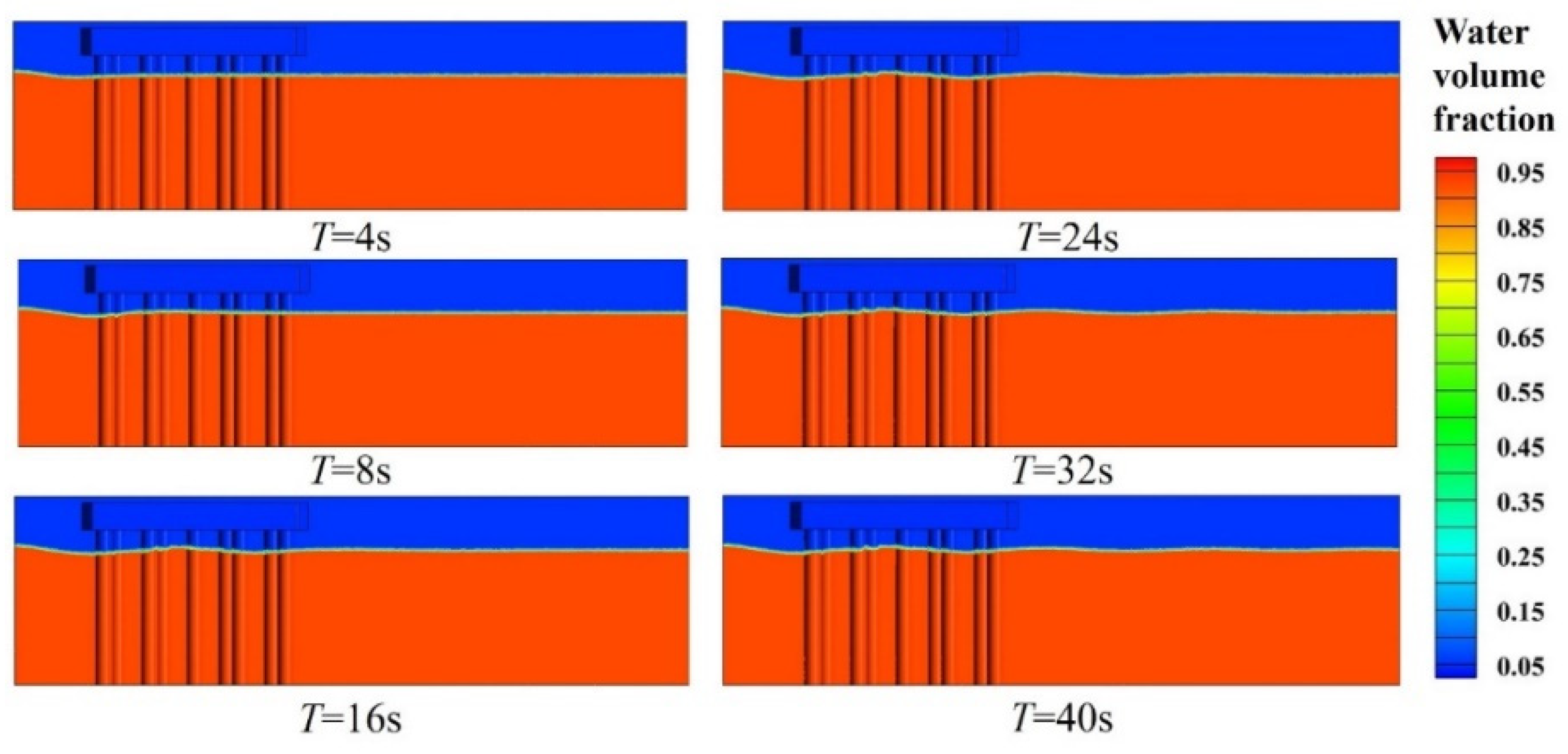
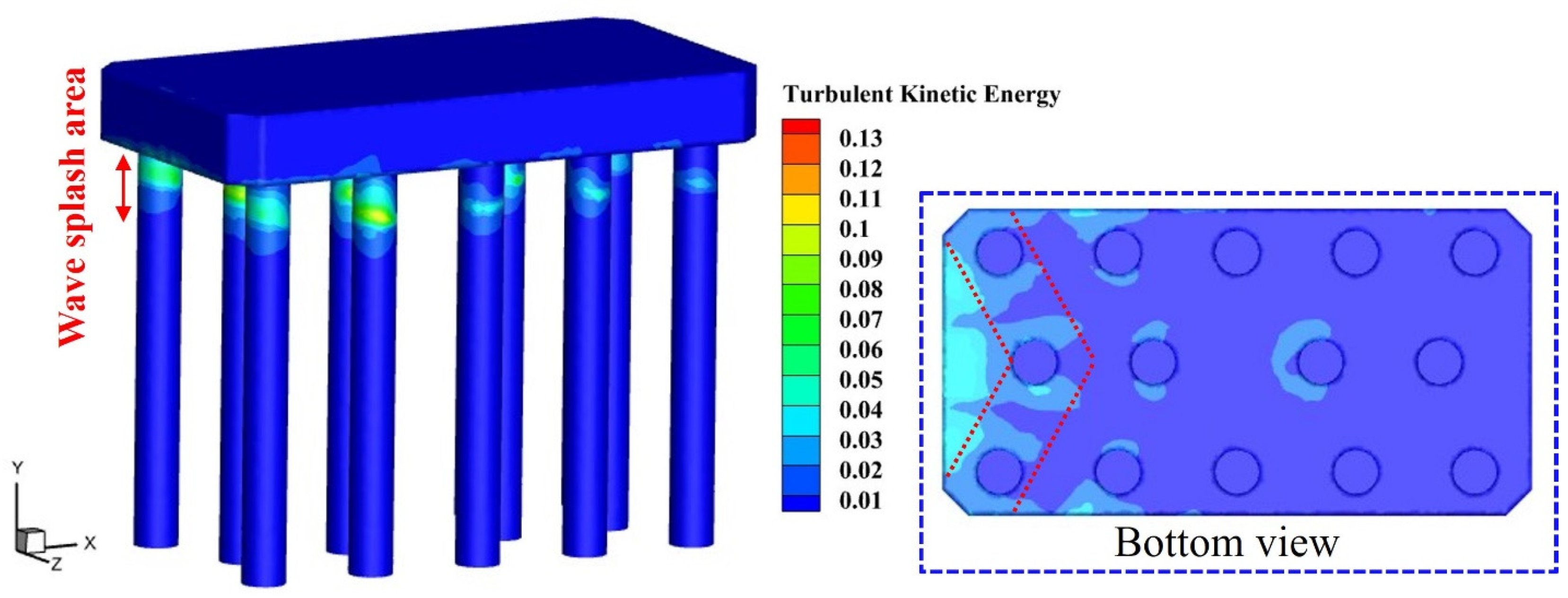
3.2.1. Hydrodynamic Phenomena
3.2.2. Wave Force Analysis
3.3. Long-Term Performance Analysis
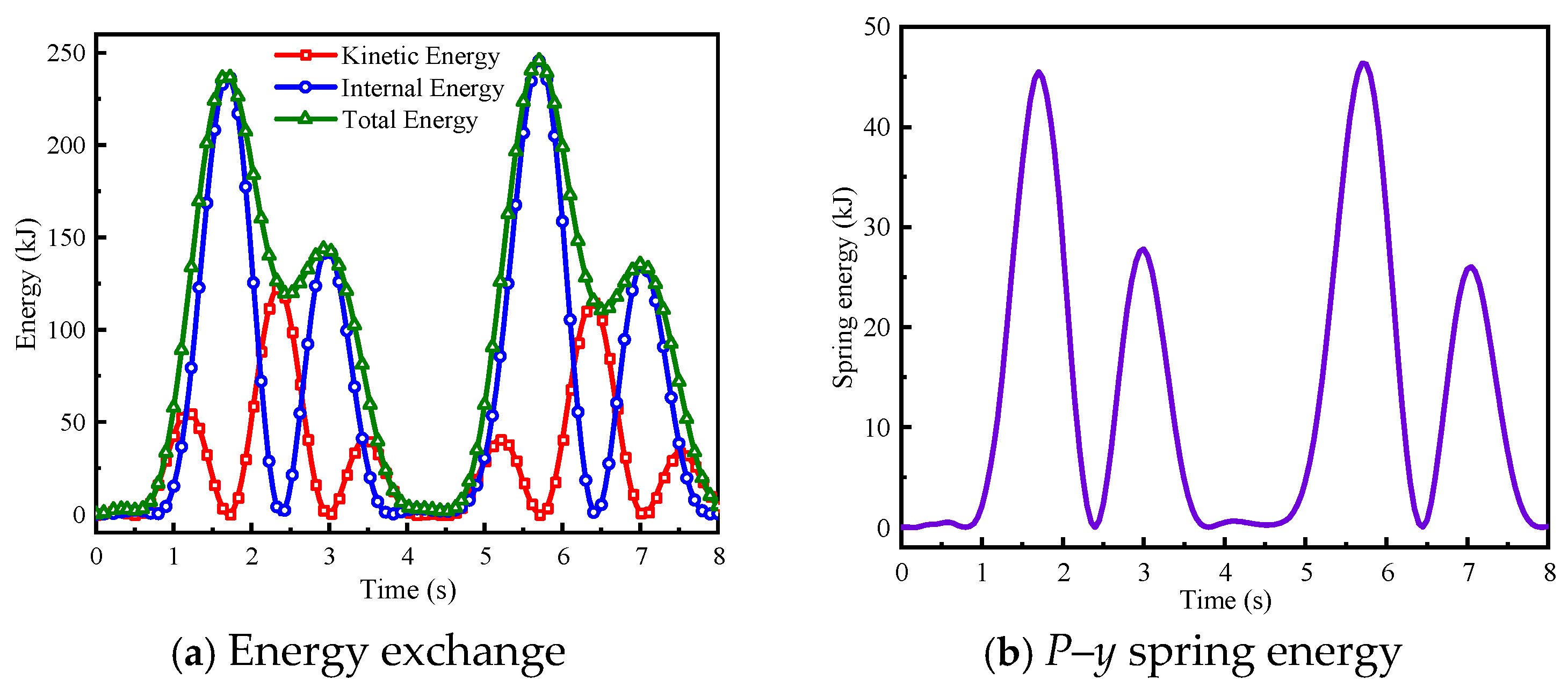
3.3.1. Energy Analysis
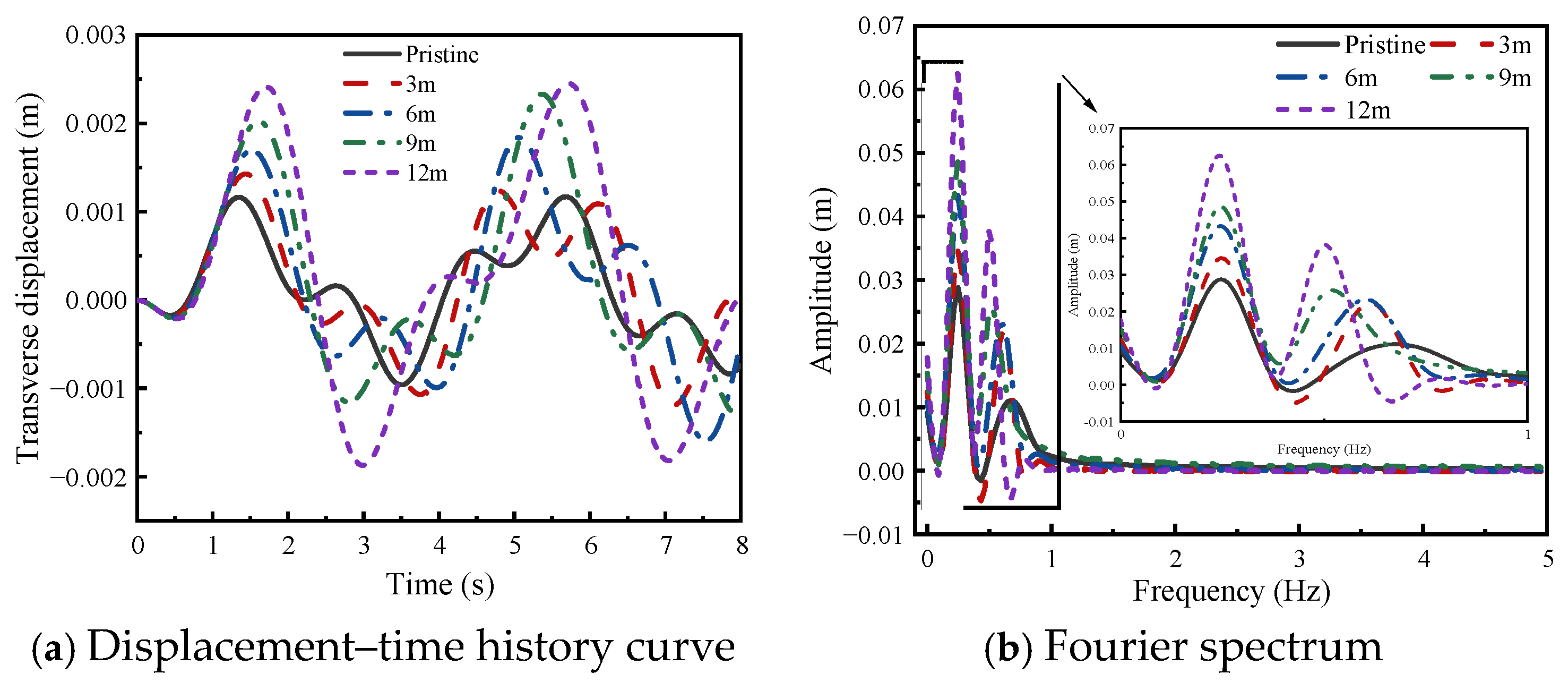
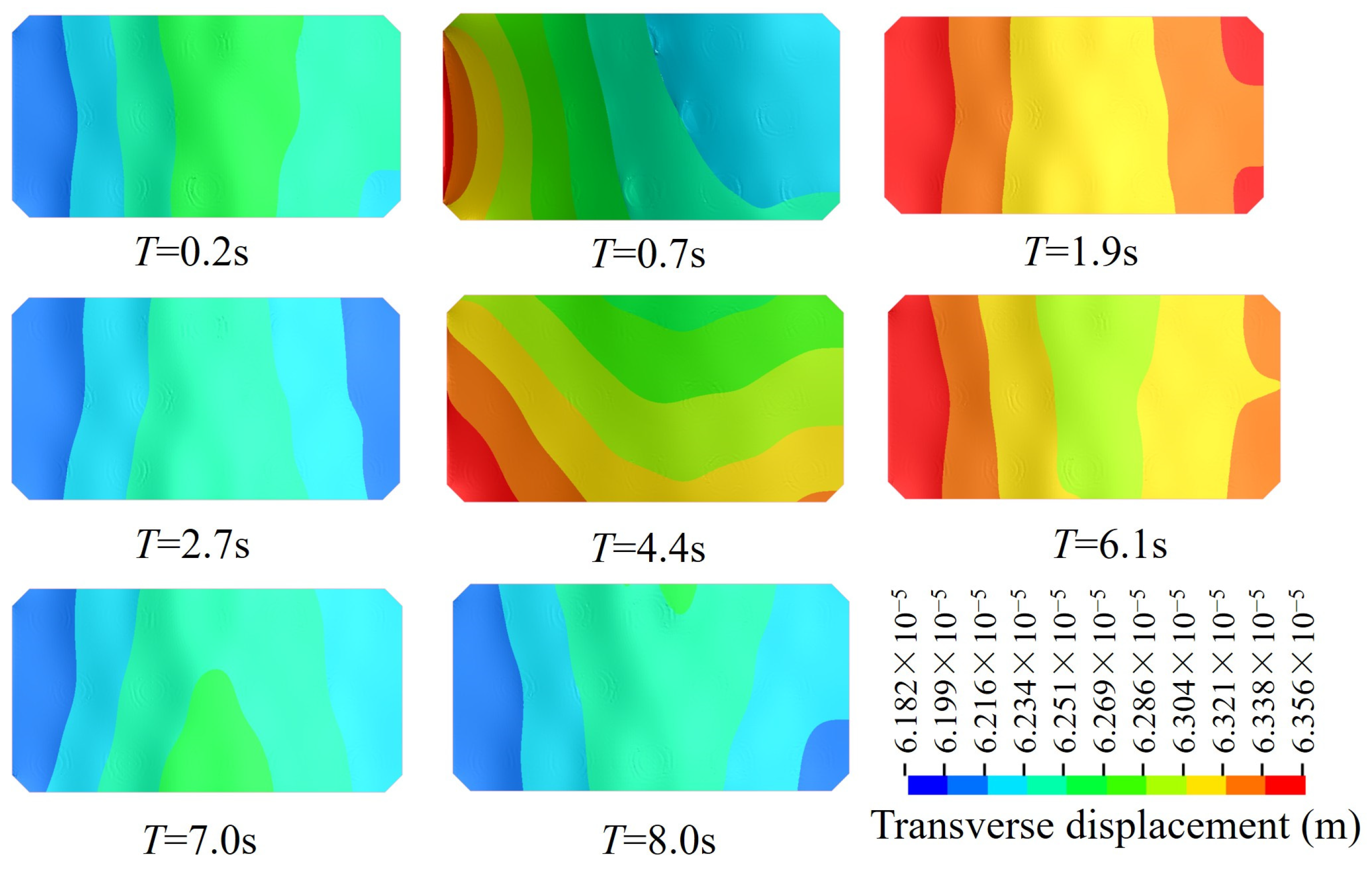
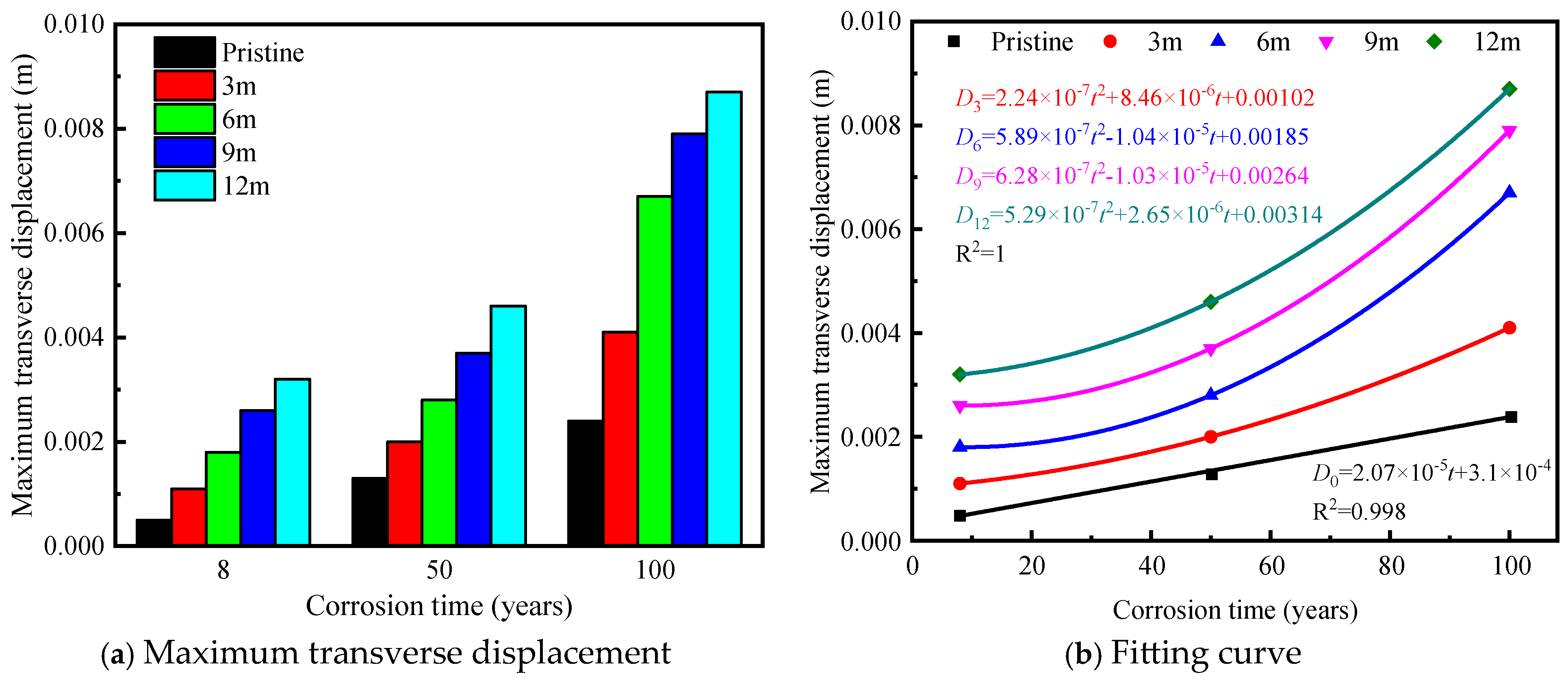
3.3.2. Displacement Response Analysis
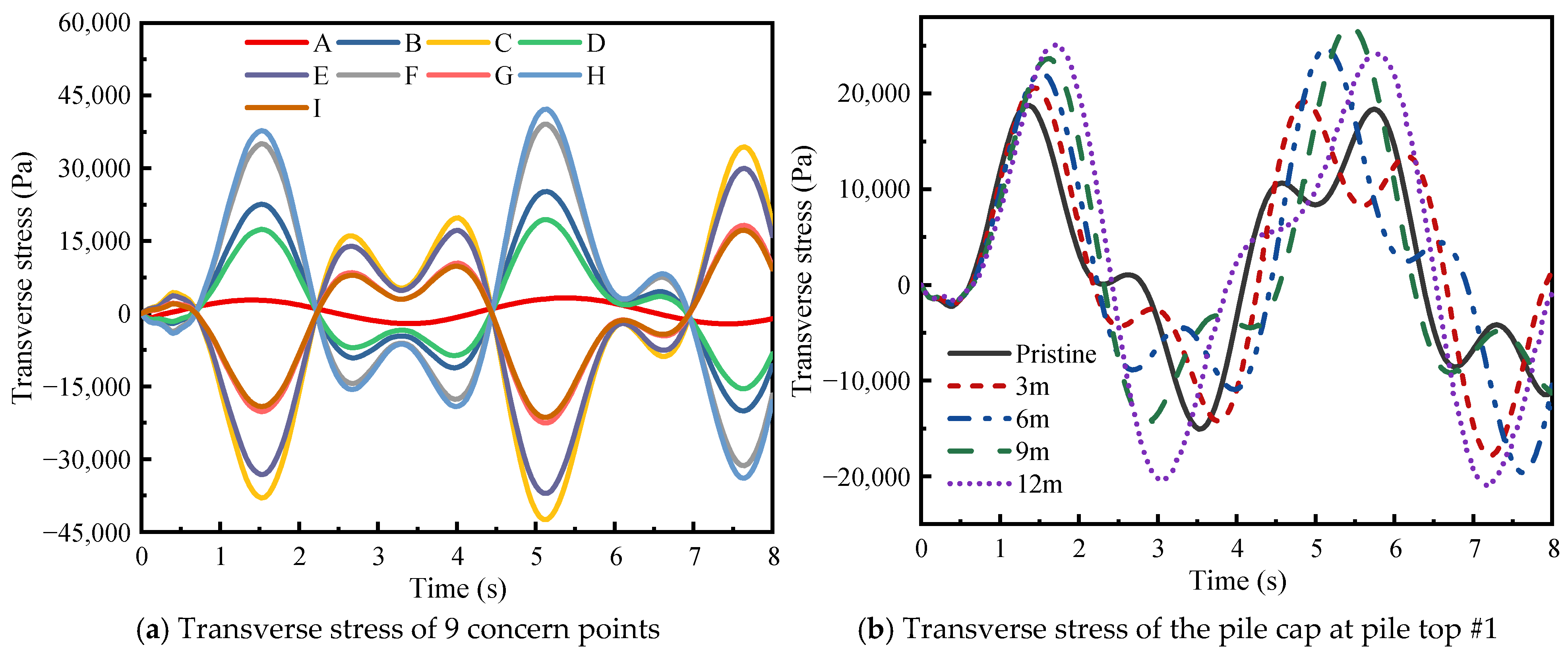
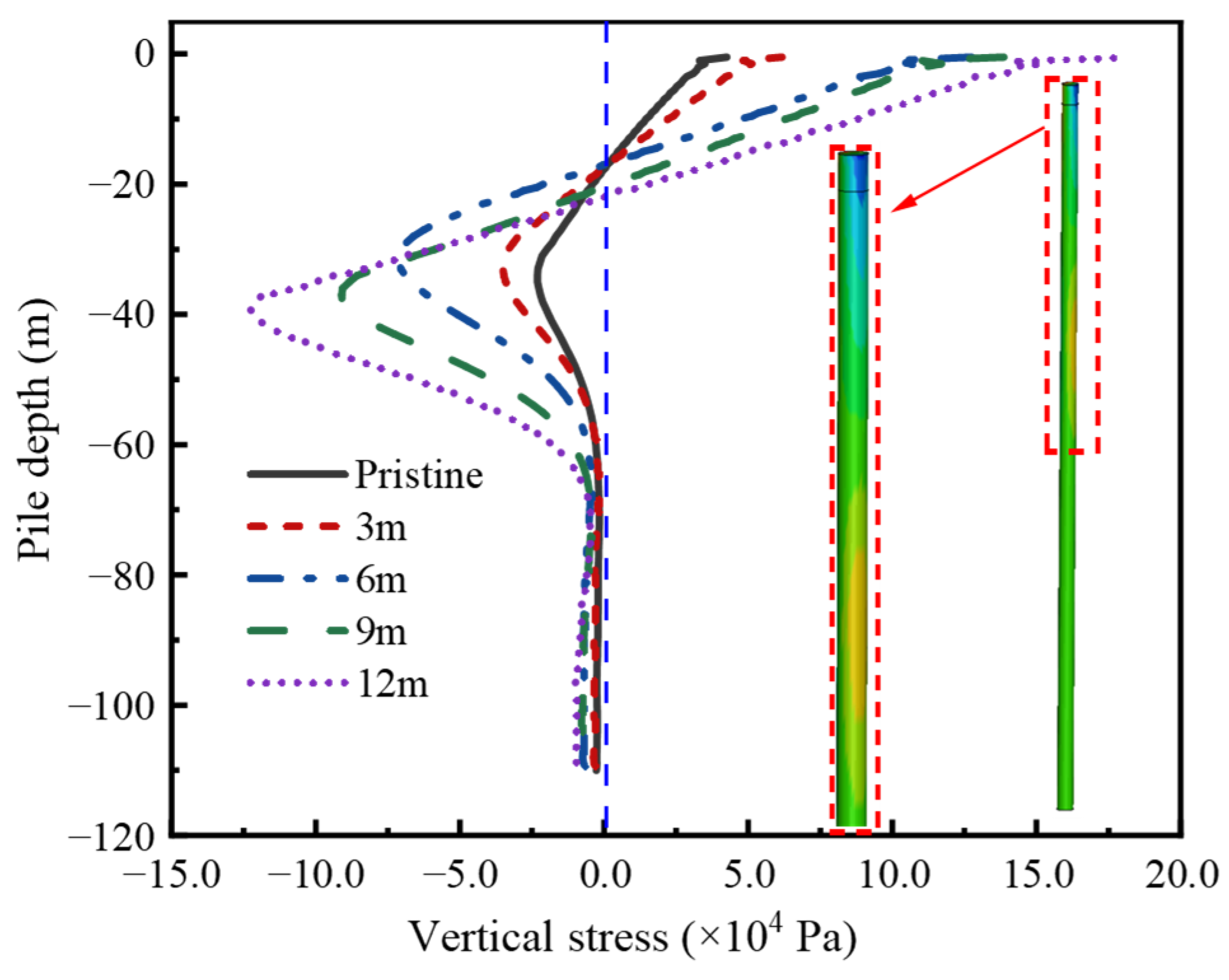
3.3.3. Stress Response Analysis
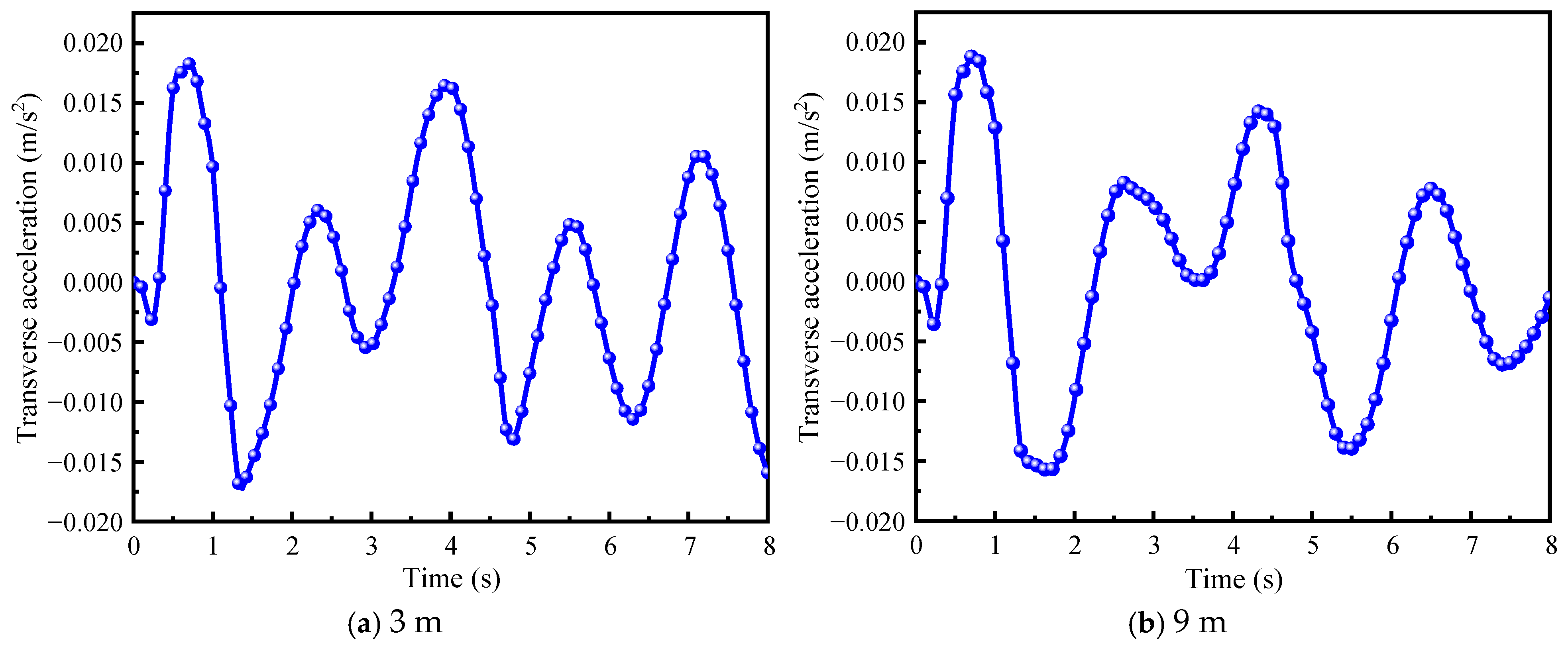
3.3.4. Acceleration Response Analysis
4. Conclusions
- (1)
- Under wave action, the wave splash zone and the base of the high-rise pile cap are most vulnerable to damage. The wave force exhibits clear periodicity, mainly influenced by horizontal wave forces. The maximum positive and negative resultant wave forces are 119,712.5 N and −88,255 N, respectively.
- (2)
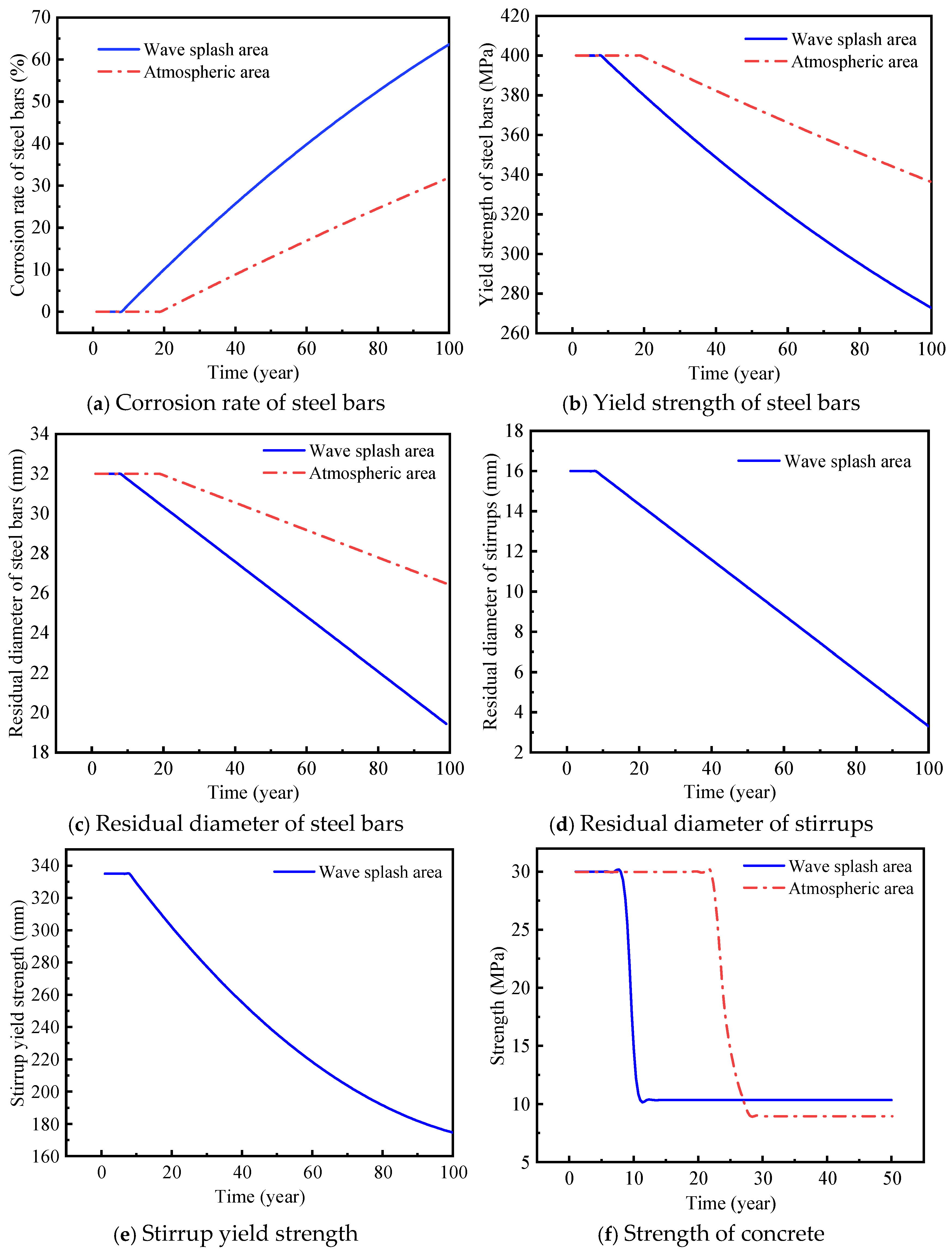
- This study reveals that steel bars degrade faster in the wave splash zone, rusting in 8 years compared to 19 years in the atmospheric area. Concrete cracks develop earlier in the splash zone (after 11 years) than in the atmospheric area (28 years). Concrete strength declines earlier in the splash zone, but shows a more significant reduction in the atmospheric area.
- (3)
- The energy fluctuation period of the high-rise pile cap matches the wave load period. Energy conversion analysis shows that the sum of internal and kinetic energy equals the total energy at all times, confirming the accuracy of the numerical model.
- (4)
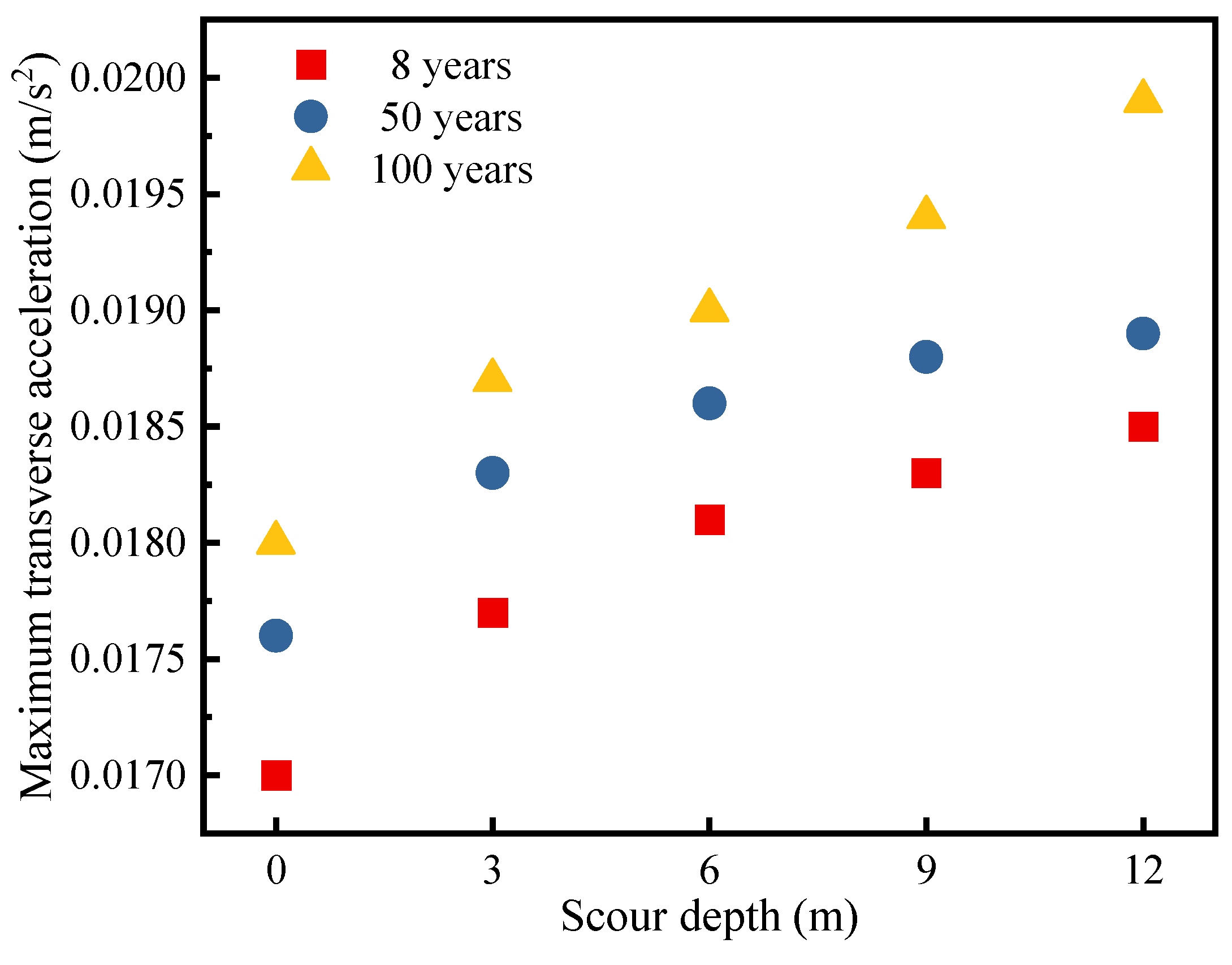
- As the scour depth increases, the transverse displacement of the cap rises, with peak displacement occurring later. Longitudinal displacement occurs earlier on the left of the bridge piles than on the right. Vertical displacement follows a cyclic pattern, with that of left-side piles first increasing and then decreasing, and that of right-side piles decreasing and then increasing. The maximum transverse displacement grows with an increase in corrosion time.
- (5)
- There is a noticeable concentration of stress at the pile cap connection. As the scour depth increases, the transverse stress in the cap rises. Vertical tensile stress is seen at the pile top, shifting to vertical compressive stress at a depth of 35 m. Both the vertical tensile stress at the top and the compressive stress at 35 m increase with deeper scouring. At a burial depth of between 20 and 60 m, the pile stress first increases and then decreases.
- (6)
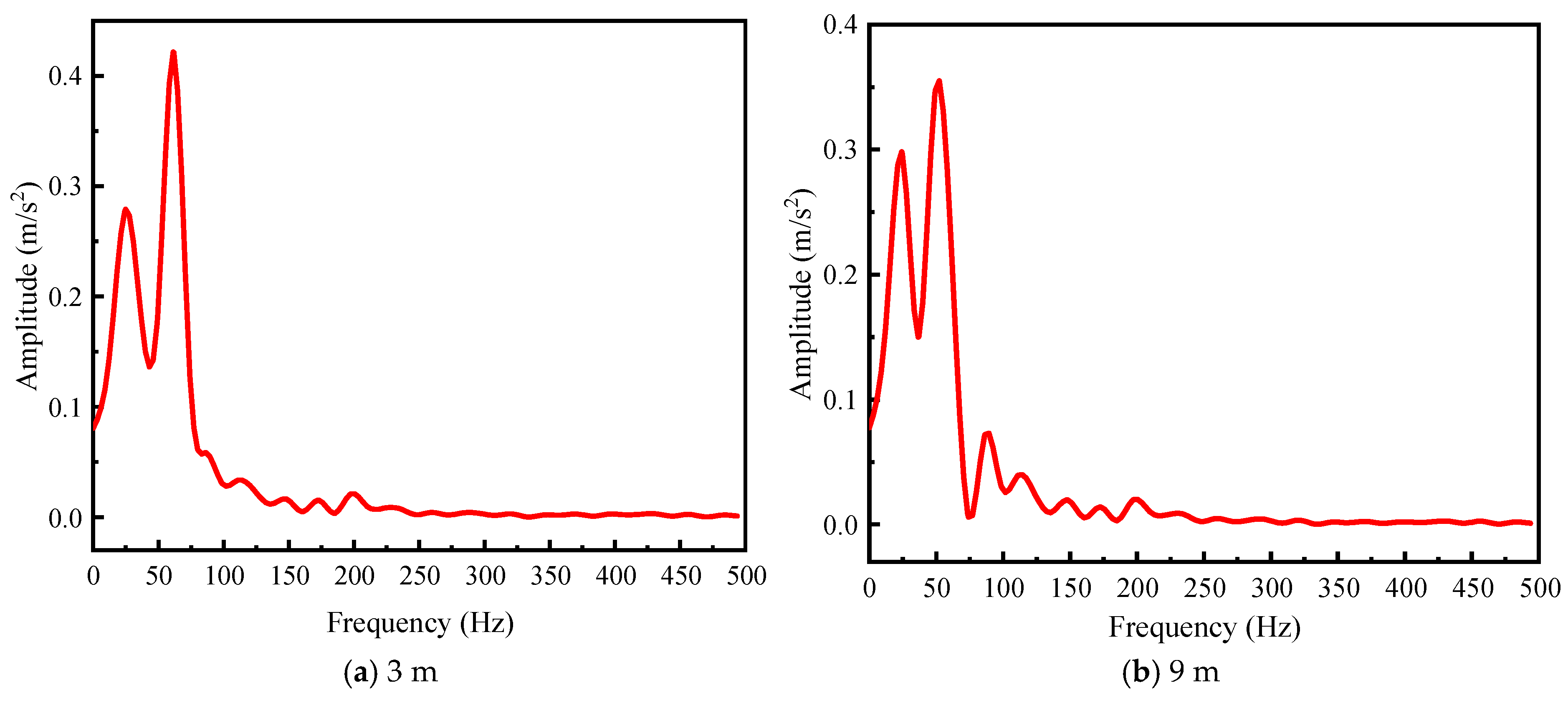
- Wave loads cause abrupt changes in cap acceleration. At a 9 m scour depth, the acceleration peak occurs later than at 3 m. Two main frequency bands, 0–50 Hz and 50–75 Hz, are observed at scour depths of 3 and 9 m, respectively. The maximum acceleration amplitude occurs at the second-order frequency (62 Hz), indicating the importance of the structure’s breaking mode at this frequency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Qu, Y.; Sun, Z. Protection mechanisms, countermeasures, assessments and prospects of local scour for cross-sea bridge foundation: A review. Ocean Eng. 2023, 288, 116145. [Google Scholar] [CrossRef]
- Yang, R.; Li, Y.; Xu, C.; Yang, Y.; Fang, C. Directional effects of correlated wind and waves on the dynamic response of long-span sea-crossing bridges. Appl. Ocean Res. 2023, 132, 103483. [Google Scholar] [CrossRef]
- Shi, X.; Liu, Z.; Guo, T.; Li, W.; Niu, Z.; Ling, F. Research on the Flow-Induced Vibration of Cylindrical Structures Using Lagrangian-Based Dynamic Mode Decomposition. J. Mar. Sci. Eng. 2024, 12, 1378. [Google Scholar] [CrossRef]
- Li, C.Y.; Chi, Y.; Sun, X.Q.; Han, Y.P.; Chen, X.; Zhao, L.C.; Zhang, H. Construction technology of high-rise pile cap foundation of offshore wind power in Taiwan Strait. IOP Conf. Ser. Earth Environ. Sci. 2017, 93, 012037. [Google Scholar] [CrossRef]
- Barnes, I.C.; Frick, K.T.; Deakin, E.; Skabardonis, A. Impact of Peak and Off-Peak Tolls on Traffic in San Francisco–Oakland Bay Bridge Corridor in California. Transp. Res. Rec. 2012, 2297, 73–79. [Google Scholar] [CrossRef]
- Miyata, T.; Yamaguchi, K. Aerodynamics of wind effects on the Akashi Kaikyo Bridge. J. Wind Eng. Ind. Aerodyn. 1993, 48, 287–315. [Google Scholar] [CrossRef]
- Yu, Y.; Li, J.; Li, J.; Xia, Y.; Ding, Z.; Samali, B. Automated damage diagnosis of concrete jack arch beam using optimized deep stacked autoencoders and multi-sensor fusion. Dev. Built Environ. 2023, 14, 100128. [Google Scholar] [CrossRef]
- Yuan, W.; Liu, M. Research on the Wave Load Effect Based on Time History Analysis of Donghai Island Bridge. Adv. Mater. Res. 2014, 919–921, 587–589. [Google Scholar] [CrossRef]
- Ma, X.; Xiong, W.; Fang, Y.; Cai, C.S. Safety assessment of ship-bridge system during sea transportation under complex sea states. Ocean Eng. 2023, 286, 115630. [Google Scholar] [CrossRef]
- Qiu, Z.; Prabhakaran, A.; Su, L.; Zheng, Y. Performance-based seismic resilience and sustainability assessment of coastal RC bridges in aggressive marine environments. Ocean Eng. 2023, 279, 114547. [Google Scholar] [CrossRef]
- Guo, A.; Fang, Q.; Bai, X.; Li, H. Hydrodynamic Experiment of the Wave Force Acting on the Superstructures of Coastal Bridges. J. Bridge Eng. 2015, 20, 04015012. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, X.; Guo, T.; Ren, H.; Zhang, M. Investigation on hydrodynamic response and characteristics of a submerged floating tunnel based on hydrodynamic tests. Ocean Eng. 2024, 300, 117187. [Google Scholar] [CrossRef]
- Yang, Y.; Fahmy, M.F.M.; Guan, S.; Pan, Z.; Zhan, Y.; Zhao, T. Properties and applications of FRP cable on long-span cable-supported bridges: A review. Compos. Part B Eng. 2020, 190, 107934. [Google Scholar] [CrossRef]
- Meier, U. Proposal for a Carbon Fibre Reinforced Composite Bridge across the Strait of Gibraltar at its Narrowest Site. Proc. Inst. Mech. Eng. Part B Manag. Eng. Manuf. 1987, 201, 73–78. [Google Scholar] [CrossRef]
- Wang, Q.; Li, L.; Zhao, Y.; Song, Y.; Zhang, C. Feasibility assessment and application of sea sand in concrete production: A review. Structures 2024, 60, 105891. [Google Scholar] [CrossRef]
- Alraeeini, A.S.; Nikbakht, E. Corrosion effect on the flexural behaviour of concrete filled steel tubulars with single and double skins using engineered cementitious composite. Structures 2022, 44, 1680–1694. [Google Scholar] [CrossRef]
- Bazli, M.; Dorothea Luck, J.; Rajabipour, A.; Arashpour, M. Bond-slip performance of seawater sea sand concrete filled filament wound FRP tubes under cyclic and static loads. Structures 2023, 52, 889–903. [Google Scholar] [CrossRef]
- Yuan, Y.; Jiang, J.; Peng, T. Corrosion Process of Steel Bar in Concrete in Full Lifetime. ACI Mater. J. 2010, 107, 562–567. [Google Scholar]
- Ou, Y.-C.; Tsai, L.-L.; Chen, H.-H. Cyclic performance of large-scale corroded reinforced concrete beams. Earthq. Eng. Struct. Dyn. 2012, 41, 593–604. [Google Scholar] [CrossRef]
- Akiyama, M.; Frangopol, D.M. Long-term seismic performance of RC structures in an aggressive environment: Emphasis on bridge piers. Struct. Infrastruct. Eng. 2014, 10, 865–879. [Google Scholar] [CrossRef]
- Fan, W.; Sun, Y.; Sun, W.; Huang, X.; Liu, B. Effects of Corrosion and Scouring on Barge Impact Fragility of Bridge Structures Considering Nonlinear Soil–Pile Interaction. J. Bridge Eng. 2021, 26, 04021058. [Google Scholar] [CrossRef]
- Liu, Z.; Niu, S.; Qian, J.; Guo, T. Investigation on flooding dynamic response and mitigation measure of river bridge. Eng. Fail. Anal. 2025, 167, 108987. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Z.; Guo, T.; Guo, A.; Liu, A. Dynamic characteristics and force analysis of box girder under tsunami action based on level-set method. Struct. Infrastruct. Eng. 2025, 1–22. [Google Scholar] [CrossRef]
- Geng, B.; Sun, K.; Gao, P.; Jin, R.; Jiang, S. Experimental and Numerical Investigations for Impact Loading on Platform Decks. J. Mar. Sci. Eng. 2024, 12, 899. [Google Scholar] [CrossRef]
- Albalawi, W.; Taha, H.H.; El-Sapa, S. Effect of the permeability on the interaction between two spheres oscillating through Stokes-Brinkmann medium. Heliyon 2023, 9, e14396. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Wei, K. Numerical simulation of wave forces on elevated pile cap of sea-crossing bridges based on RANS. Railw. Stand. Des. 2019, 63, 6. [Google Scholar]
- Deng, L.; Yang, W.; Li, Q.; Li, A. CFD investigation of the cap effects on wave loads on piles for the pile-cap foundation. Ocean Eng. 2019, 183, 249–261. [Google Scholar] [CrossRef]
- Al-Hanaya, A.; El–Sapa, S. Impact of permeability and fluid parameters in couple stress media on rotating eccentric spheres. Open Phys. 2024, 22, 20240112. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Ye, X.; Zhou, X.; Wang, M.; Qiao, D.; Zhao, X.; Wang, L. Global Responses Analysis of Submerged Floating Tunnel Considering Hydroelasticity Effects. J. Mar. Sci. Eng. 2024, 12, 1854. [Google Scholar] [CrossRef]
- Algatheem, A.M.; Taha, H.H.; El-Sapa, S. Interaction Between Two Rigid Hydrophobic Spheres Oscillating in an Infinite Brinkman–Stokes Fluid. Mathematics 2025, 13, 218. [Google Scholar] [CrossRef]
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-oriented techniques. Comput. Phys. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Ducrozet, G.; Bouscasse, B.; Gouin, M.; Ferrant, P.; Bonnefoy, F. CN-Stream: Open-source library for nonlinear regular waves using stream function theory. arXiv 2019, arXiv:1901.10577v1. [Google Scholar]
- Karadeniz, H. Wave-Current and Fluid-Structure Interaction Effects on the Stochastic Analysis of Offshore Structures. In Proceedings of the Second International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 14–19 June 1992. [Google Scholar]
- Fan, W.; Sun, Y.; Yang, C.; Sun, W.; He, Y. Assessing the response and fragility of concrete bridges under multi-hazard effect of vessel impact and corrosion. Eng. Struct. 2020, 225, 111279. [Google Scholar] [CrossRef]
- Third Harbor Engineering Investigation and Design Institute of the Ministry of Transport. Code for Pile Foundation in Port Engineering; People’s Transportation Publishing House: Beijing, China, 2012. [Google Scholar]
- DNV-OS-J101; Design of Offshore Wind Turbine Structures. Det Norske Veritas: Bærum, Norway, 2010.
- American Petroleum Institute (API). Petroleum and Natural Gas Industries-Specific Requirements for Offshore Structures. Part 4-Geotechnical and Foundation Design Considerations. 2011. Available online: http://refhub.elsevier.com/S0267-7261(19)30591-3/sref25 (accessed on 15 February 2025).
- Boulanger, R.; Curras, C.; Kutter, B.; Wilson, D.; Abghari, A. Seismic Soil-Pile-Structure Interaction Experiments and Analyses. J. Geotech. Geoenviron. Eng. 1999, 125, 750–759. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, C.; Chen, Z. Nonlinear Dynamic Response and Assessment of Bridges under Barge Impact with Scour Depth Effects. J. Perform. Constr. Facil. 2020, 34, 04020058. [Google Scholar] [CrossRef]
- Imam, B. Chapter Six—Climate Change Impact for Bridges Subjected to Scour and Corrosion. In Climate Adaptation Engineering; Bastidas-Arteaga, E., Stewar, M.G., Eds.; Butterworth-Heinemann: Oxford, UK, 2019; pp. 165–206. [Google Scholar]
- Calvi, G.M.; Priestley, M.J.N.; Kowalsky, M.J. Displacement-Based Seismic Design of Bridges. Struct. Eng. Int. 2013, 23, 112–121. [Google Scholar] [CrossRef]
- Guo, A.; Yuan, W.; Lan, C.; Guan, X.; Li, H. Time-dependent seismic demand and fragility of deteriorating bridges for their residual service life. Bull. Earthq. Eng. 2015, 13, 2389–2409. [Google Scholar] [CrossRef]
- Balafas, K.; Kiremidjian, A.S. Reliability assessment of the rotation algorithm for earthquake damage estimation. Struct. Infrastruct. Eng. 2015, 11, 51–62. [Google Scholar] [CrossRef]
- Liang, Z.; Lee, G.C. Towards establishing practical multi-hazard bridge design limit states. Earthq. Eng. Eng. Vib. 2013, 12, 333–340. [Google Scholar] [CrossRef]
- Khan, R.; Datta, T. Effect of Support Flexibility and Soil- Structure Interaction on Seismic Risk Analysis of Harp Type Cable Stayed Bridges. Ing. Sismica 2014, 31, 32–46. [Google Scholar]
- Cairns, J.; Plizzari, G.; Du, Y.; Law, D.; Franzoni, C. Mechanical properties of corrosion-damaged reinforcement. ACI Mater. J. 2005, 102, 256–264. [Google Scholar]
- Du, Y.G.; Clark, L.A.; Chan, A.H.C. Residual capacity of corroded reinforcing bars. Mag. Concr. Res. 2005, 57, 135–147. [Google Scholar] [CrossRef]
- Molina, F.J.; Alonso, C.; Andrade, C. Cover cracking as a function of rebar corrosion: Part 2—Numerical model. Mater. Struct. 1993, 26, 532–548. [Google Scholar] [CrossRef]
- Vecchio, F.J.; Collins, M.P. The Modified Compression-Field Theory for Reinforced Concrete Elements Subjected to Shear. ACI Struct. J. 1986, 83, 219–231. [Google Scholar]
- Biondini, F.; Vergani, M. Damage modeling and nonlinear analysis of concrete bridges under corrosion. In Proceedings of the Sixth International Conference of Bridge Maintenance, Safety and Management (IABMAS 2012), Stresa, Italy, 8–12 July 2012; pp. 949–957. [Google Scholar]
- Coronelli, D.; Gambarova, P. Structural Assessment of Corroded Reinforced Concrete Beams: Modeling Guidelines. J. Struct. Eng. 2004, 130, 1214–1224. [Google Scholar] [CrossRef]
- Vidal, T.; Castel, A.; François, R. Analyzing crack width to predict corrosion in reinforced concrete. Cem. Concr. Res. 2004, 34, 165–174. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, B.; Chen, W. Evaluation of the seismic responses of a long-span cable-stayed bridge located in complex terrain based on an SHM-oriented model. Stahlbau 2015, 84, 252–266. [Google Scholar] [CrossRef]
- Johnson, P.A.; Dock, D.A. Probabilistic Bridge Scour Estimates. J. Hydraul. Eng. 1998, 124, 750–754. [Google Scholar] [CrossRef]
- Xu, B.; Wei, K.; Qin, S.; Hong, J. Experimental study of wave loads on elevated pile cap of pile group foundation for sea-crossing bridges. Ocean Eng. 2020, 197, 106896. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid Type | Density (kg/m3) | Dynamic Viscosity (kg/m·s) | Linear Attenuation Impedance (s−1) |
|---|---|---|---|
| Air | 1.225 | 1.7894 × 10−5 | 0 |
| Water | 998.2 | 0.001003 | 2.0367 |
| Component | Element | Constitutive Model | Parameters | Value |
|---|---|---|---|---|
| Concrete | SOLID | *MAT_CSCM_CONCRETE | Mass density | 2400 kg/m3 |
| Uniaxial compression strength | 30 MPa | |||
| Maximum aggregate size | 20 mm | |||
| Rate effects | Turn on | |||
| Longitudinal bar/stirrup | SOLID | *MAT_PLASTIC_KINEMATIC | Mass density | 7850 kg/m3 |
| Young’s modulus | 235,000 MPa | |||
| Poisson’s ratio | 0.3 | |||
| Yield stress | 310 MPa | |||
| Failure strain | 0.35 | |||
| C | 40 | |||
| P | 5 |
| Dc (cm2/s) | C0 (kg/m3) | Ccr (kg/m3) | |
|---|---|---|---|
| Atmospheric Area | Wave Splash Area | ||
| 2 × 10−8 | 2.95 | 7.35 | 0.9 |
| Area | Parameters | Service Time | ||
|---|---|---|---|---|
| 8 Years | 50 Years | 100 Years | ||
| Wave splash area | Corrosion rate of steel bars | 0 | 32.94% | 63.61% |
| Residual diameter of steel bars | 32 mm | 26.2 mm | 19.3 mm | |
| Yield strength of steel bars | 400 MPa | 334.11 MPa | 272.78 MPa | |
| Residual diameter of stirrups | 16 mm | 10.2 mm | 3.3 mm | |
| Stirrup yield strength | 335 MPa | 235.63 MPa | 174.64 MPa | |
| Concrete strength | 30 MPa | 10.34 MPa | 10.34 MPa | |
| Atmospheric area | Corrosion rate of steel bars | 0 | 12.92% | 31.88% |
| Residual diameter of steel bars | 32 mm | 29.86 mm | 26.41 mm | |
| Yield strength of steel bars | 400 MPa | 374.16 MPa | 336.24 MPa | |
| Concrete strength | 30 MPa | 9.0 MPa | 9.0 MPa | |
| Corrosion Duration | Scour Depth | ||||
|---|---|---|---|---|---|
| 0 m | 3 m | 6 m | 9 m | 12 m | |
| 8 years | 0.0170 | 0.0177 | 0.0181 | 0.0183 | 0.0185 |
| 50 years | 0.0176 | 0.0183 | 0.0186 | 0.0188 | 0.0189 |
| 100 years | 0.0180 | 0.0187 | 0.0190 | 0.0194 | 0.0199 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, S.; Liu, Z.; Guo, T.; Guo, A.; Xu, S. Modeling and Investigation of Long-Term Performance of High-Rise Pile Cap Structures Under Scour and Corrosion. J. Mar. Sci. Eng. 2025, 13, 450. https://doi.org/10.3390/jmse13030450
Niu S, Liu Z, Guo T, Guo A, Xu S. Modeling and Investigation of Long-Term Performance of High-Rise Pile Cap Structures Under Scour and Corrosion. Journal of Marine Science and Engineering. 2025; 13(3):450. https://doi.org/10.3390/jmse13030450
Chicago/Turabian StyleNiu, Shilei, Zhongxiang Liu, Tong Guo, Anxin Guo, and Sudong Xu. 2025. "Modeling and Investigation of Long-Term Performance of High-Rise Pile Cap Structures Under Scour and Corrosion" Journal of Marine Science and Engineering 13, no. 3: 450. https://doi.org/10.3390/jmse13030450
APA StyleNiu, S., Liu, Z., Guo, T., Guo, A., & Xu, S. (2025). Modeling and Investigation of Long-Term Performance of High-Rise Pile Cap Structures Under Scour and Corrosion. Journal of Marine Science and Engineering, 13(3), 450. https://doi.org/10.3390/jmse13030450