1. Introduction
Freezing is a common natural phenomenon in winter at high latitudes of the earth. The ice force is a potential threat to bottom-fixed offshore structures due to its high magnitude and evident dynamic effects [
1,
2]. For instance, in 1969, the JZ20-2MSW platform was destroyed because of serious ice conditions in the Bohai Sea [
3,
4].
Many researchers have put their effort into the research of sea ice force and tried to present a more reasonable sea ice force model.
Su et al. [
5] investigated the typical statistical characteristics of local ice loads based on the data from in-situ measurements. Neill [
6] investigated the dynamic ice force on piers and piles. Torodd [
7] studied model-based force and state estimation in experimental ice-induced vibrations. The feasibility and advantages of the ice-breaking cone were proven by the analytical results obtained by Ralston et al. [
8] in the 1980s. Ordinary and serious ice conditions in the Bohai Sea were briefly presented by Zhang [
9] and formulas for calculating the forces applied on offshore structures by ice were suggested.
From the above researches [
5,
6,
7,
8,
9], the ice force is often regarded as a static load without considering its dynamic effects. In engineering design specifications, Nord [
10], Qu [
11], Barker [
12], and Gravesen [
13] conducted dynamic ice force experiments, respectively. Ice force acting on the Nordströmsgrund lighthouse was identified [
10]. Qu [
11] analyzed a random ice force for narrow conical structures through practical engineering experiments. Baker [
12] and Gravesen [
13] investigated the dynamic ice force on the offshore wind turbine, the dynamic characteristics of the structure under such loads were discovered.
Some dynamic ice force models have been recommended, while most of them are deterministic ones, such as the simplified dynamic ice force model presented by Kärnä and Qu [
14]. Based on sea ice dynamics, Hunke et al. [
15] established an elastic-viscous-plastic model. Li and Li [
16] established a modified discrete element model for sea ice dynamics. Considering the redistribution process and the evolution of the ice thickness distribution, an idealized zero-dimensional model was presented by Godlovitch and Monahan [
17]. Qu [
18] proposed an ice dynamics model for narrow conical structures, which showed that ice-breaking cones were effective in reducing the ice force. On the other hand, the specific dynamic ice models have been developed based on local environmental conditions. Wang et al. [
19] and Pedersen et al. [
20] presented the proper sea ice dynamics models for the Gulf of Riga and the Greenland Sea, respectively. Besides, the dynamic and thermodynamic sea ice model for the subpolar regions was studied by Lu et al. [
21]. However, sea ice breaking is a stochastic process in essence and it is usually difficult to simulate the action of ice force on offshore structures due to the low efficiency of the traditional random vibrations analysis method. Therefore, Shi [
22], Zhi [
23], and Ou [
24] proposed the concept of sea ice force spectrums. Shi [
22] recommended an ice force spectrum based on the displacement and strain responses of a single degree freedom structure, and more complicated structures were considered in the study of Zhi [
23]. Ou [
24] analyzed the characteristics of the random process of ice force and mechanism and established the relationship between spectral parameters and ice thickness.
The rupture forms of the sea ice can be mainly divided into several types, such as crushing failure, bending failure, and so on. Lee [
25] investigated local ice load signals in ice-covered waters. Kim [
26] discussed the assumptions behind rule-based ice loads of crushing failure. Through tests, the damage mechanism of sea ice was studied by Huang [
27] in detail. The frequency of ice force under different ice failure modes and the occurrence probability of their magnitudes in full-scale had been studied by Suominen [
28]. Zhang [
29] studied the mechanism of ductile-brittle transition of sea ice damage and the influence of microcrack evolution on sea ice properties. Jones and Eylander [
30] studied the ice force which acted on a vertical structure or inclined structure. Hayo et al. [
31] investigated the ice-induced vibrations in the states of mixed crushing and buckling. Aksenov and Hibler [
32] found that the icebreaking was highly irregular, and small cracks appeared around the broken area. Gagnon [
33] established a numerical model for ice crushing failure. Sopper [
34] performed a series of ice crushing tests to investigate the effects of external boundary conditions and geometric contact shapes under ice force.
In fact, ice force and the seismic effect have many similar characteristics, e.g., both of them are dynamic and stochastic with a specific frequency spectrum. Referred to as seismic design theory, the design response spectrums of sea ice force due to the crushing and bending failure are proposed. The novel method is simple and easy to analyze the response of bottom-fixed offshore structures subjected to ice.
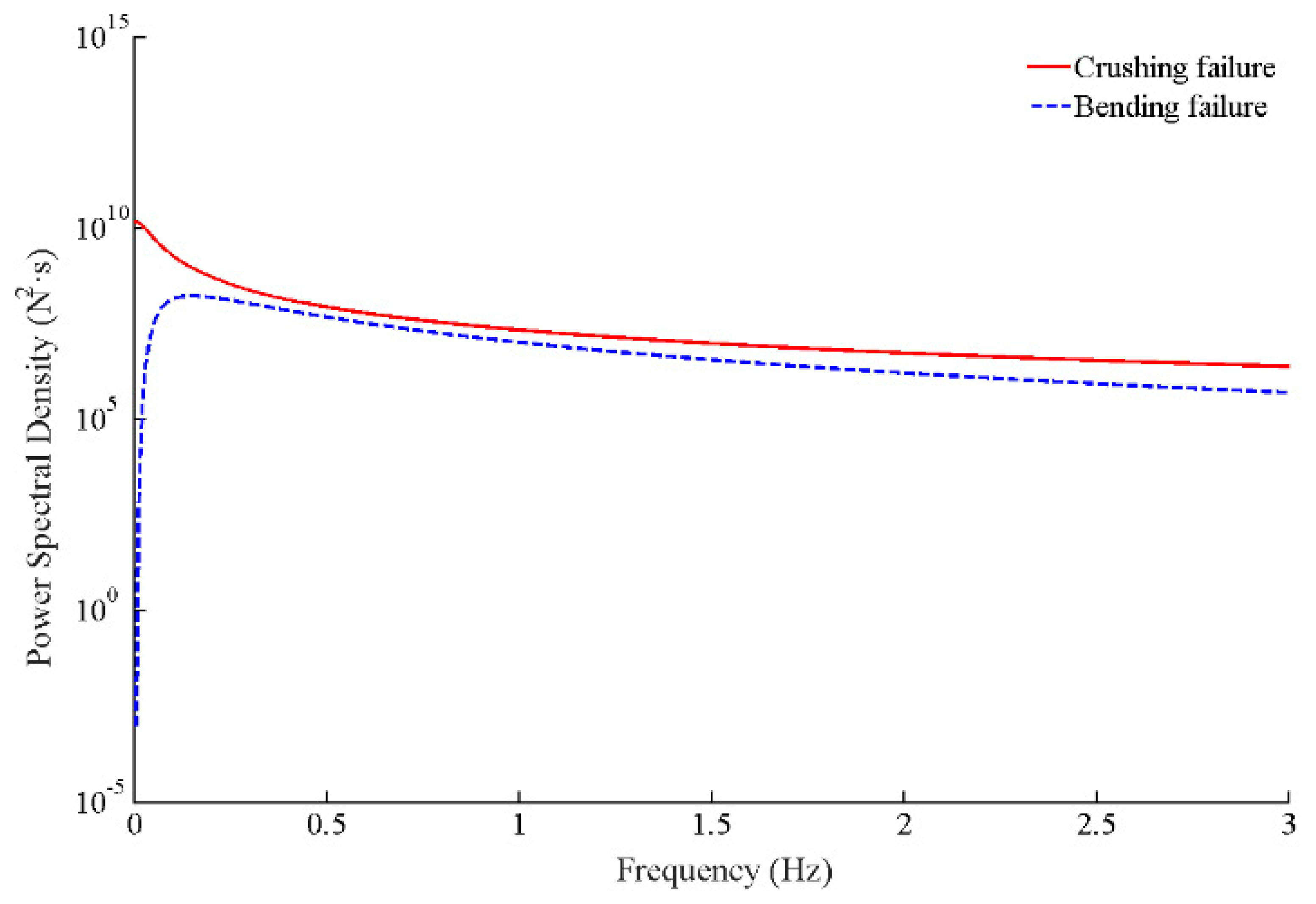
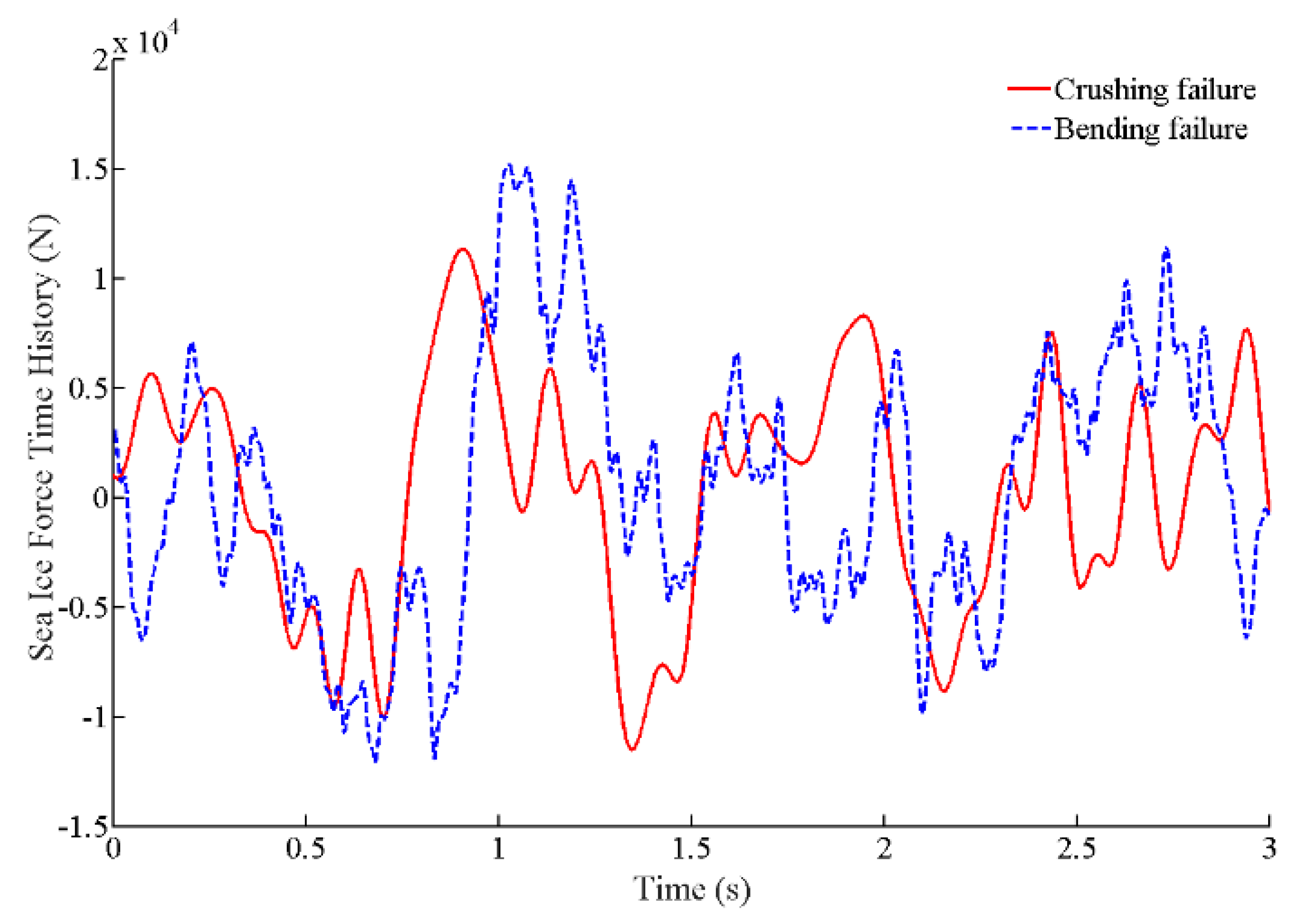
Firstly, a single-degree of freedom (SDOF) model with different natural frequencies and damping is established to simulate different offshore structures subjected to ice force. Secondly, the crushing and bending failure power spectral densities (PSD) of the ice force, and the properties of ice are recommended. Thirdly, ice conditions in the Bohai Sea are selected as a typical investigated zone. A large amount of ice force time-history samples for crushing and bending failure are generated by applying the amplitude superposition method. Then, the maximum responses of SDOF structures with different natural frequencies subjected to each ice force time-history are obtained. The design response spectrums for both crushing and bending failure sea ice force are achieved. Finally, the numerical results validate the proposed method.
2. Analysis Model
Assume that the offshore structure can be simplified as a SDOF system, as shown in
Figure 1, where
m is the lumped mass;
k is the shearing stiffness; and
c is the damping coefficient;
l1 and
l2 indicate the heights above and under the sea level, respectively.
Since the system is excited by the ice force
p(
t) at the sea level (point A in
Figure 1), rather than directly on the lumped mass (point B in
Figure 1), the ice force should be replaced with an equivalent force
p’(
t) to establish the motion equation of the system. Neglecting the inertia force, the lateral displacement
x and rotation
θ at point A subjected to
p(
t) is:
where
EI is the flexural stiffness of the cantilever beam. The displacement at point B is then:
Note that:
where
k is the shear stiffness.
Equation (2) can be re-written as:
According to Equation (4), the displacement at point B induced by the equivalent ice force
has to be equal to that raised by
:
therefore,
The motion equation of the SDOF system subjected to ice force is then:
where
,
, and
are the displacement, velocity, and acceleration of the SDOF system, respectively; and
where
is the equivalent coefficient of the sea ice force.
6. Numerical Example
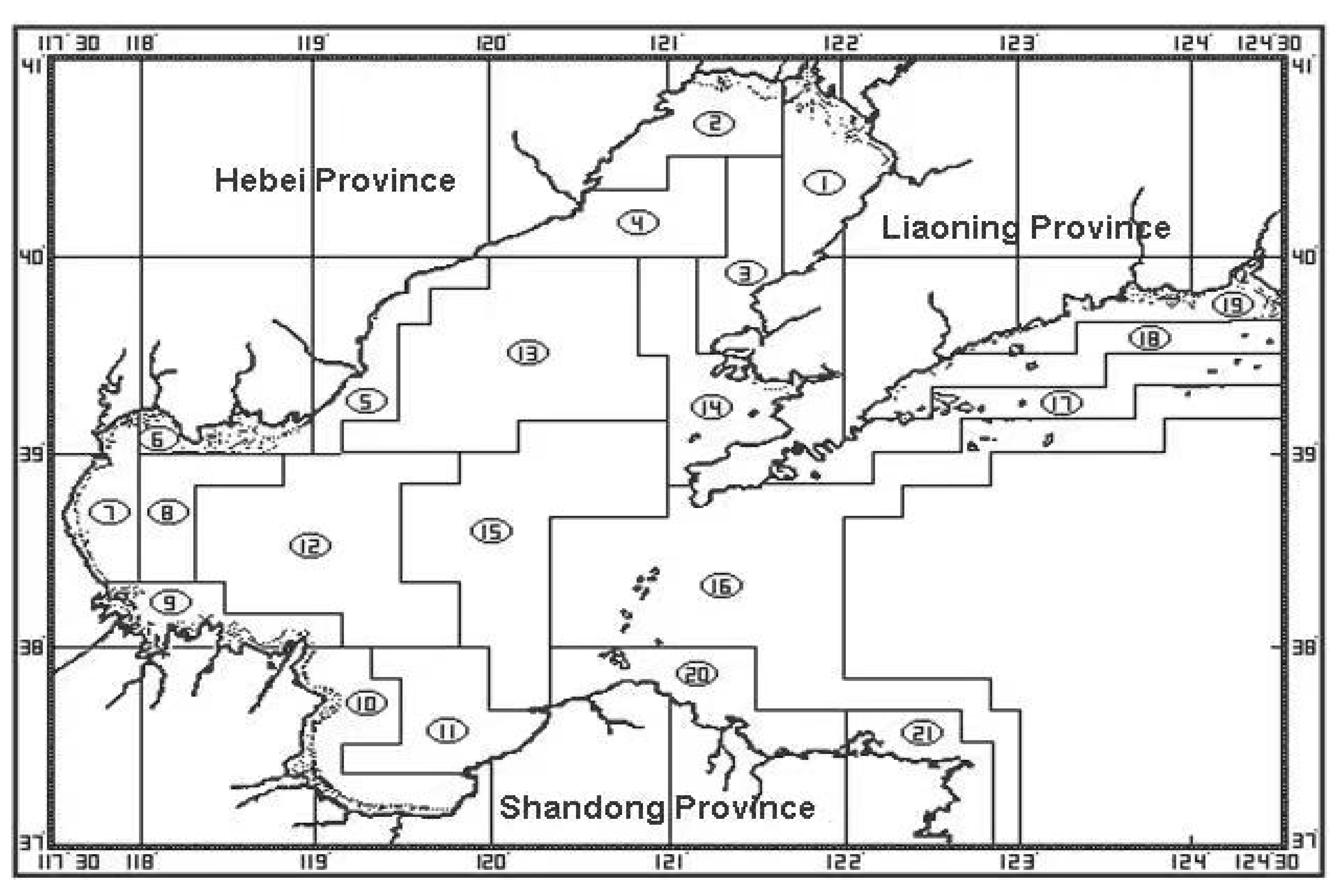
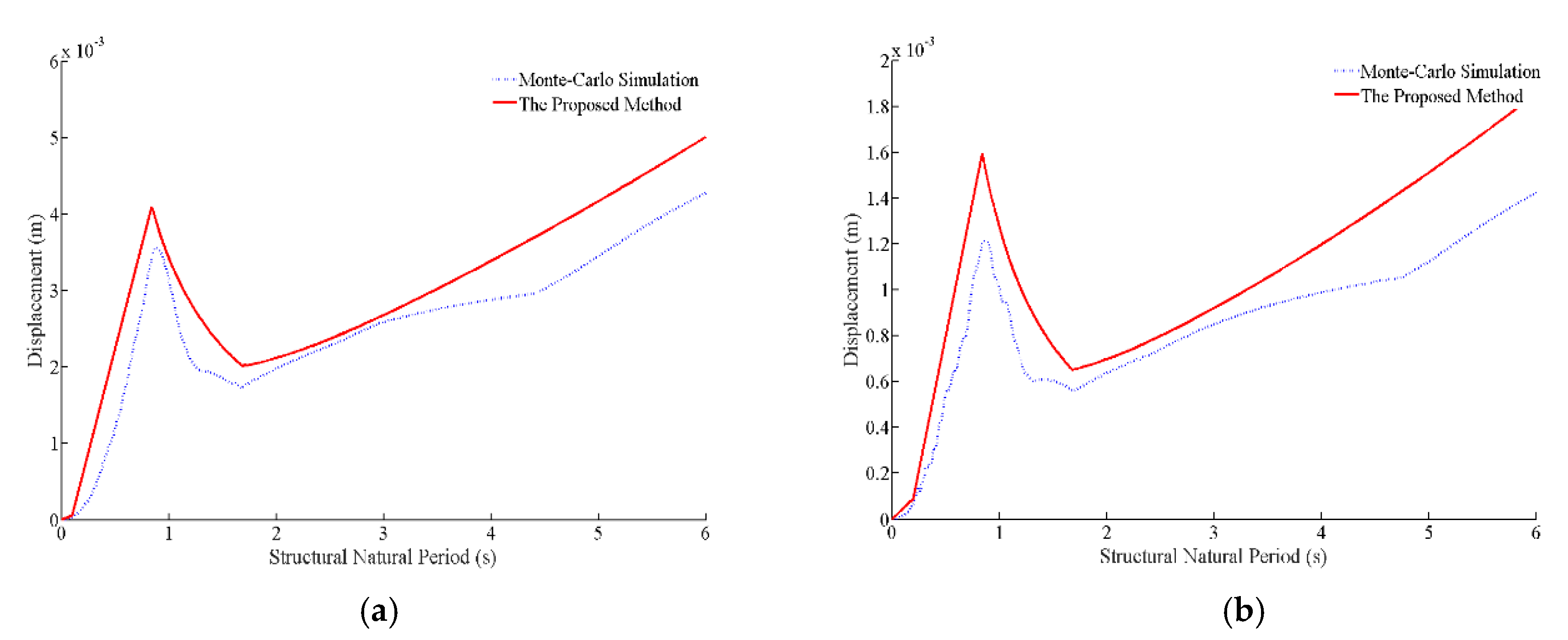
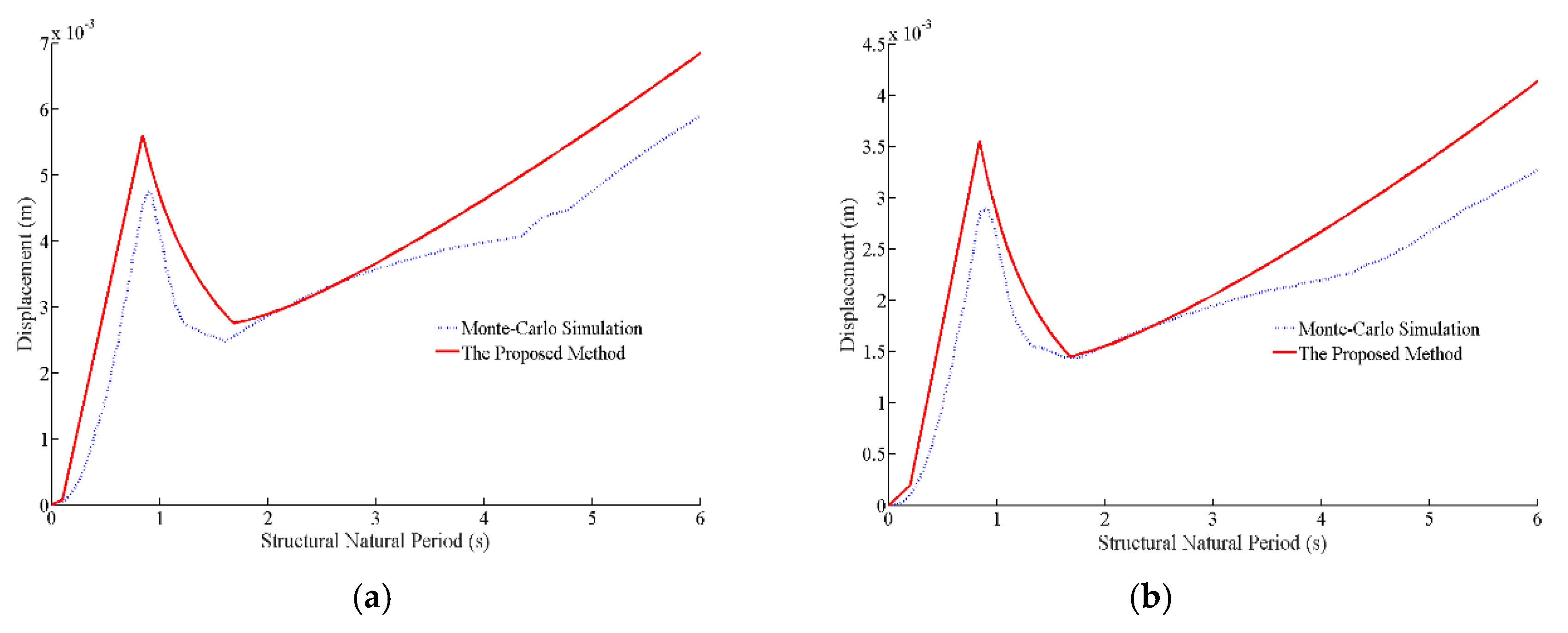
In this section, selecting Zone 6 as an example, the proposed method is verified by comparing the results derived from the Monte-Carlo simulation. Taking the SDOF offshore structure as the research object, whose lumped mass is 106 kg and damping ratio is 0.02, and which natural period varies with the changing stiffness. Assume that the loaded pile diameter of the structure is 2.7 m and the heights above and under the sea level are 20 m and 80 m, respectively. The displacements excited by crushing and bending failure sea ice force are studied, respectively.
In the Monte-Carlo simulation, 200 time-history samples are generated for both crushing and bending failure sea ice force. Based on the Monte-Carlo method and the ice force response method,
Figure 9 and
Figure 10 show the displacements of the offshore structure with different structural natural periods subjected to crushing and bending failure sea ice force. It can be seen that the results obtained from the two methods display a manifested same trend.
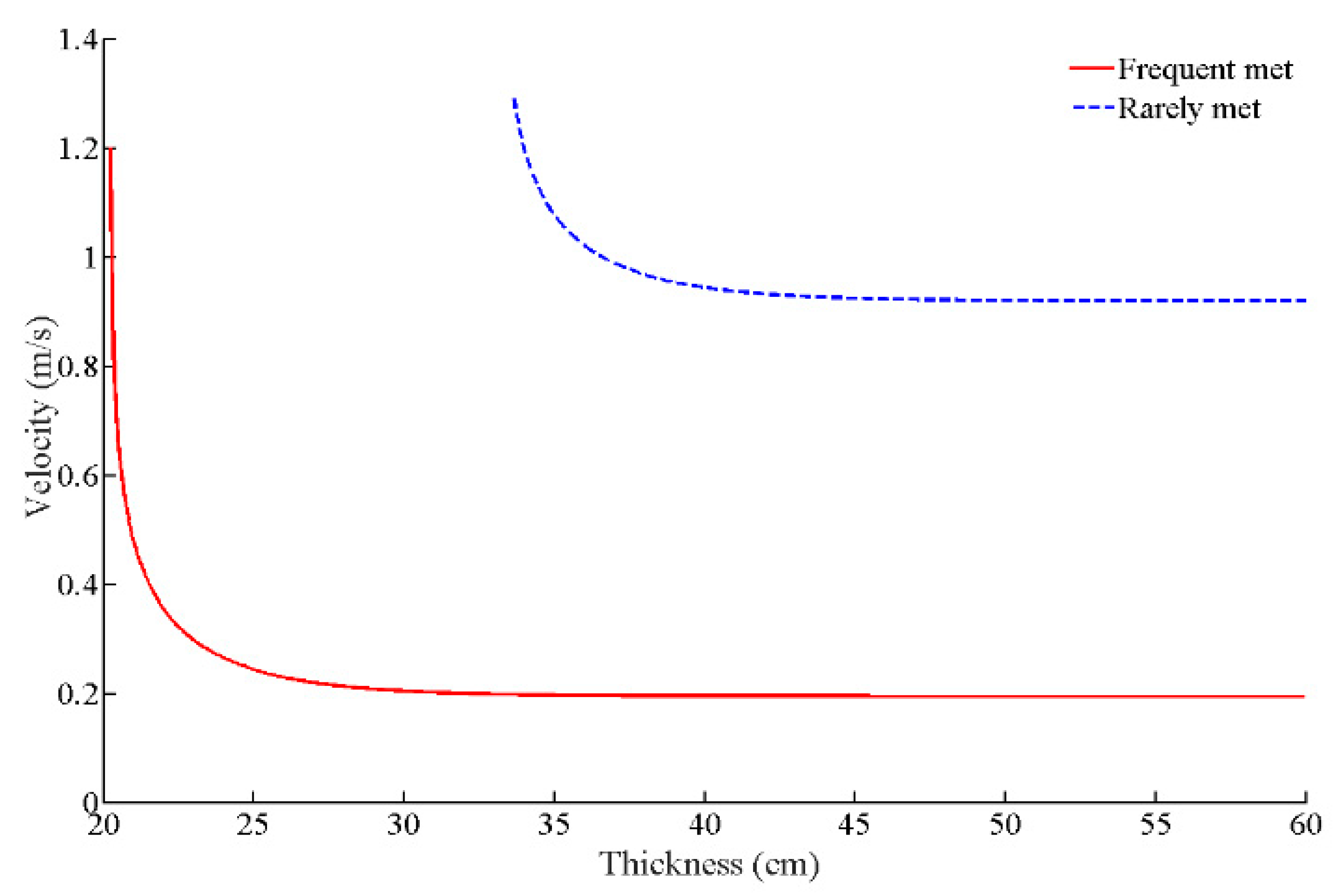
From
Figure 9 and
Figure 10, the displacement induced by ice bending failure is less than that by ice crushing failure. Meanwhile, it can be seen that the displacement under rarely met sea ice force is greater than that under frequent met sea ice force. Generally speaking, the proposed method provides an upper limit.
As shown in
Figure 9 and
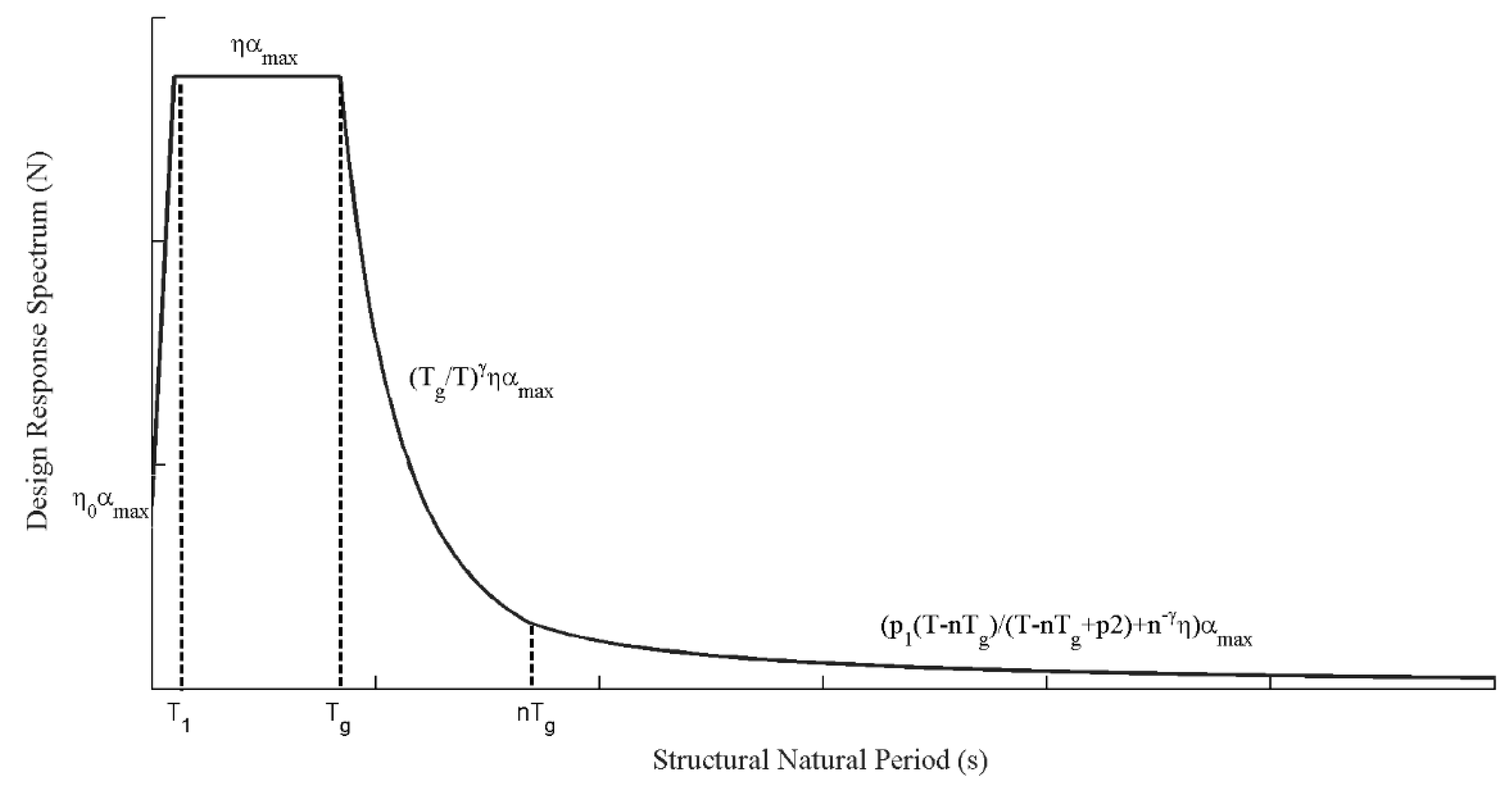
Figure 10, for the offshore structures with natural periods in the interval of [0,
T1], which have either large rigidity or light-weight, the response such as displacement will increase with the increasing structural natural periods. For the offshore structure with natural period in the interval of (
T1,
nTg], the response will increase remarkably. It is clear that resonance will occur if the structure natural period is close to
Tg. When
T is larger than
nTg, the structural displacement will increase with the increase of structural natural periods due to the decreasing structural stiffness.
The computing time of the example required for the proposed method is only 0.04 s while, that for the Monte-Carlo simulation is 7537.6 s. It is obvious that the proposed method is not only easy to calculate but also matches the needs in engineering and has common applicability.
7. Conclusions
Referred to as the earthquake response spectrum theory, a new design idea to determine the maximum response of offshore structures subjected to ice forces is suggested.
(1) Considering the randomness of ice force and the complexity of structures, the theory of response spectrum suitable for offshore structures subjected to crushing and bending failure sea ice forces is established.
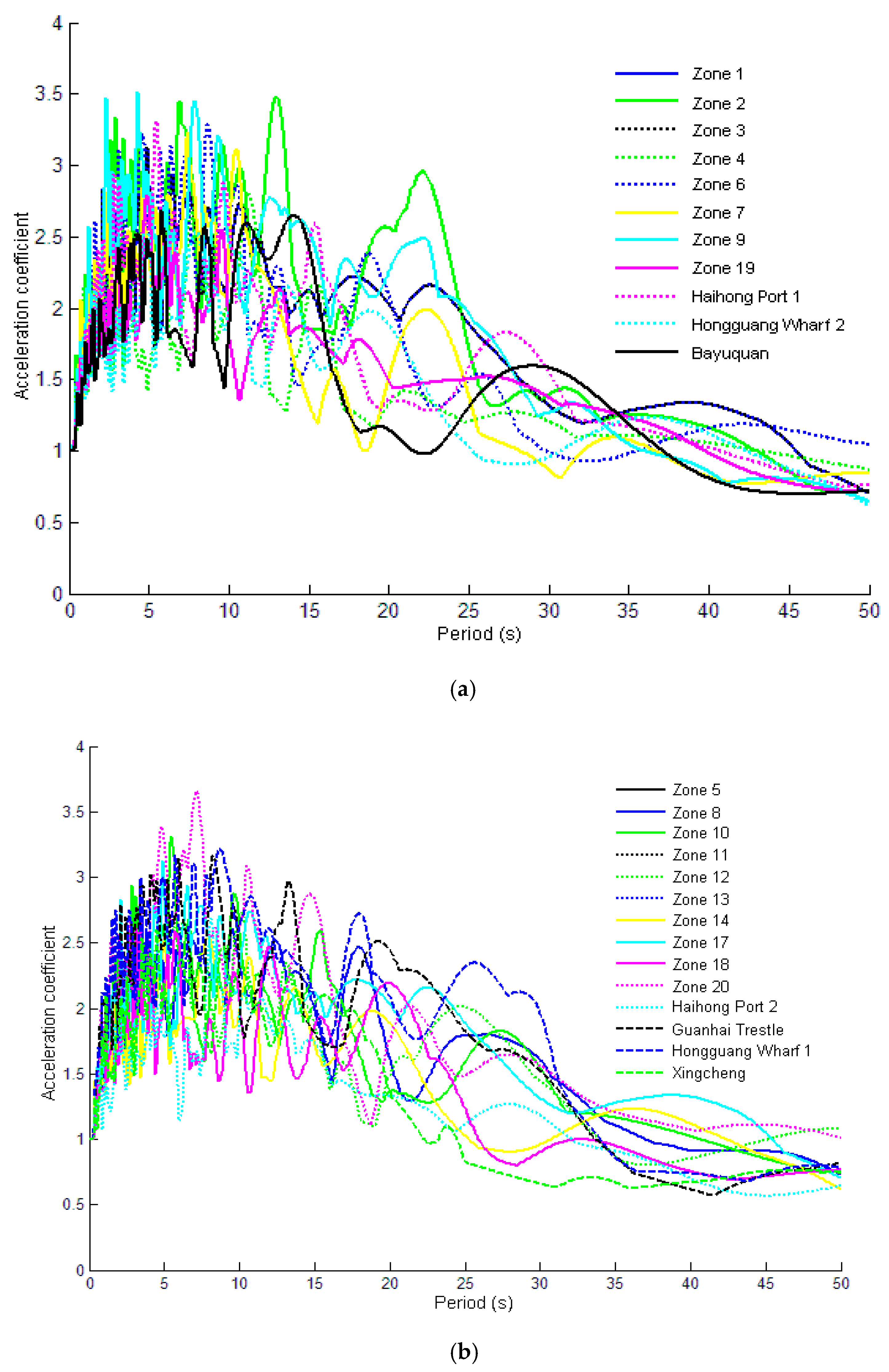
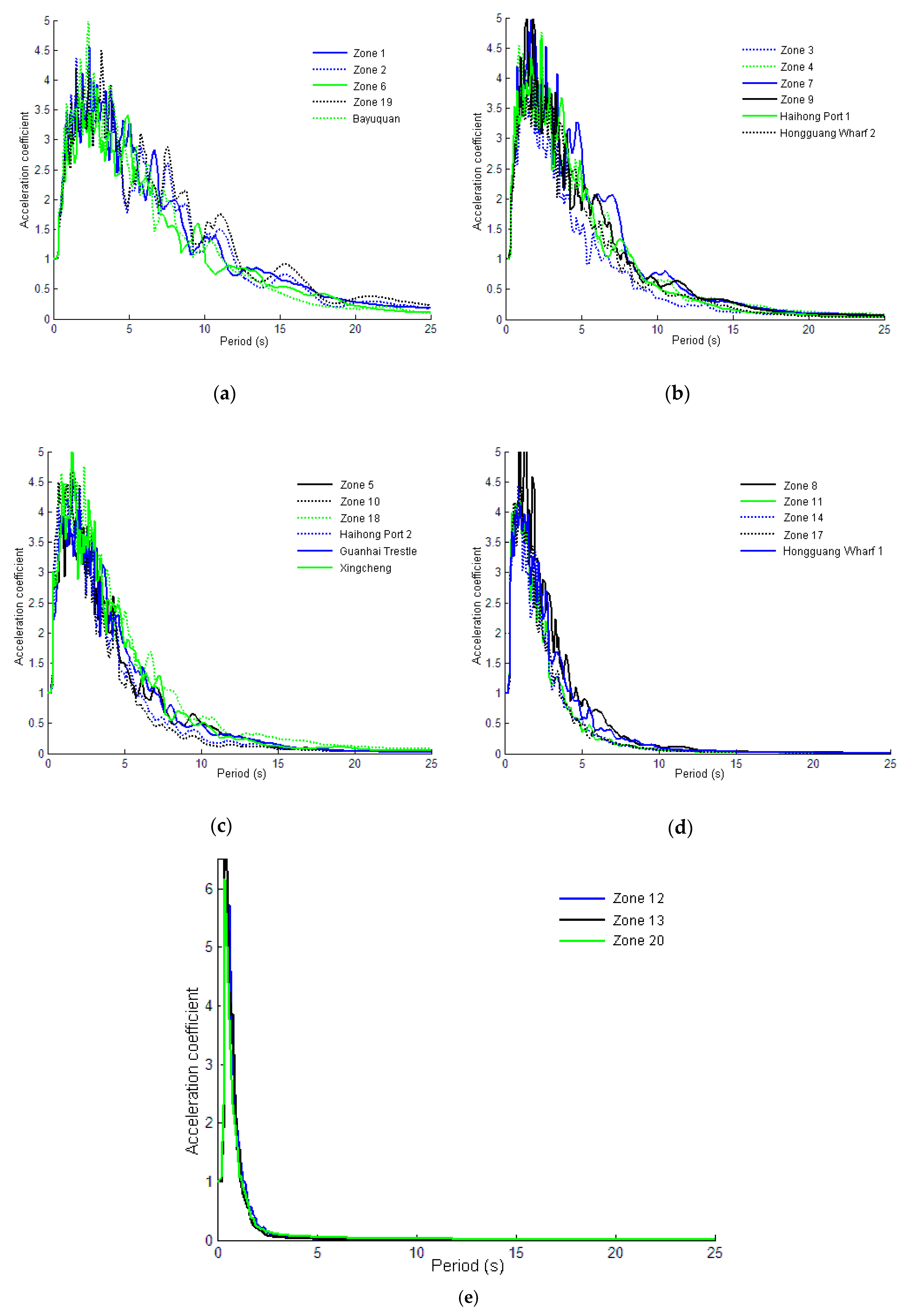
(2) Selecting Zone 6 in the Bohai Sea, dynamic analysis of SDOF structures subjected to synthesized ice force time-histories is performed. Then, the design response spectrums for fixed offshore structures subjected to ice forces induced by crushing and bending failure are proposed, respectively.
(3) Compared with results from the Monte-Carlo simulation and the proposed method, the proposed method is validated. Additionally, the proposed method provides an upper limit of offshore structural response subjected to ice force.
(4) For the offshore structure with a natural period in the range of (T1, nTg], the response under ice force will increase remarkably. The maximum response will occur when the structure natural period is close to Tg.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}