Nonlinear Destructive Interaction between Wind and Wave Loads Acting on the Substructure of the Offshore Wind Energy Converter: A Numerical Study


Abstract
:1. Introduction
2. External Forces Acting on the Offshore Wind Energy Converter
2.1. Wind Force
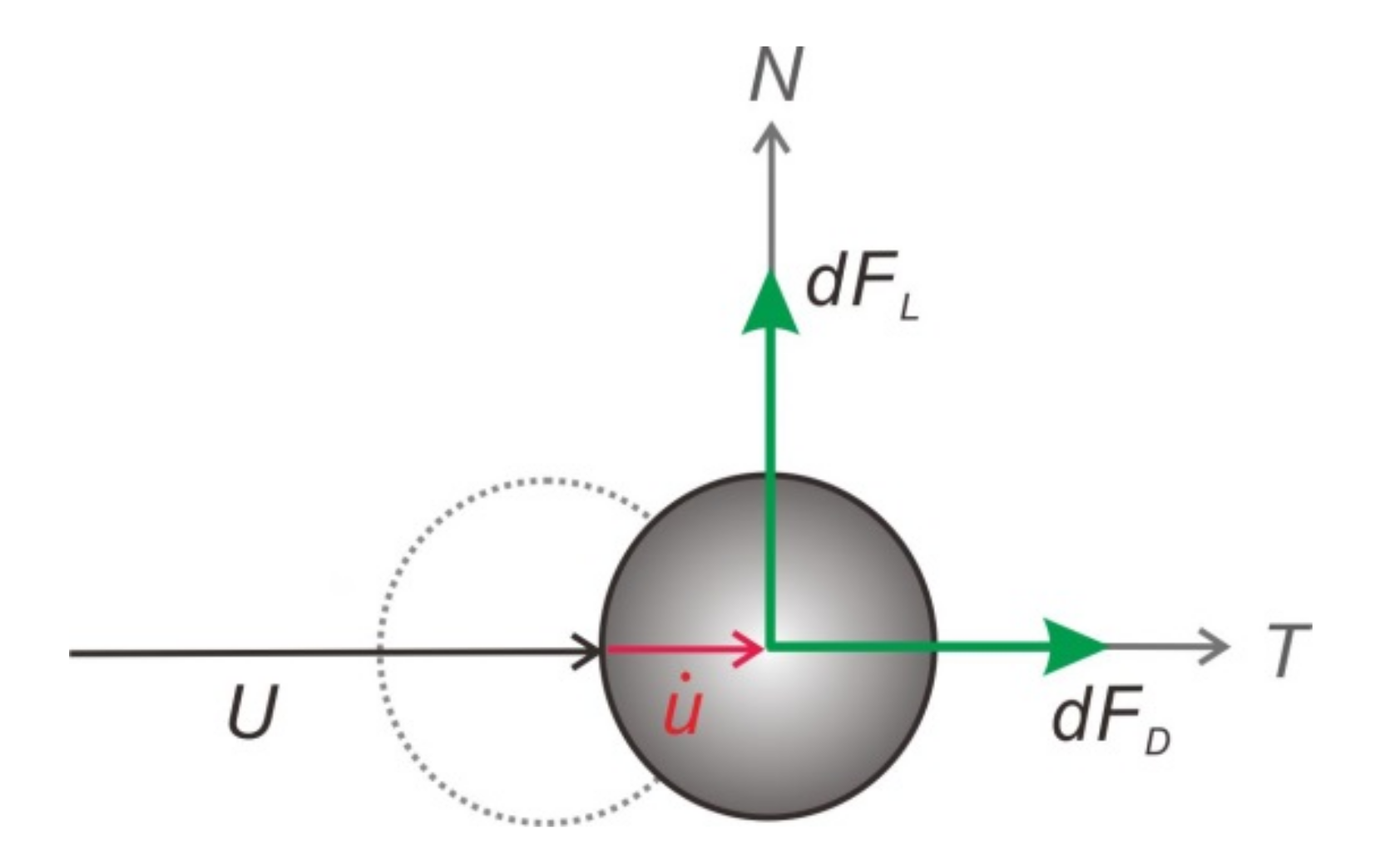
2.2. Aerodynamic Damping
2.3. Random Wave Force
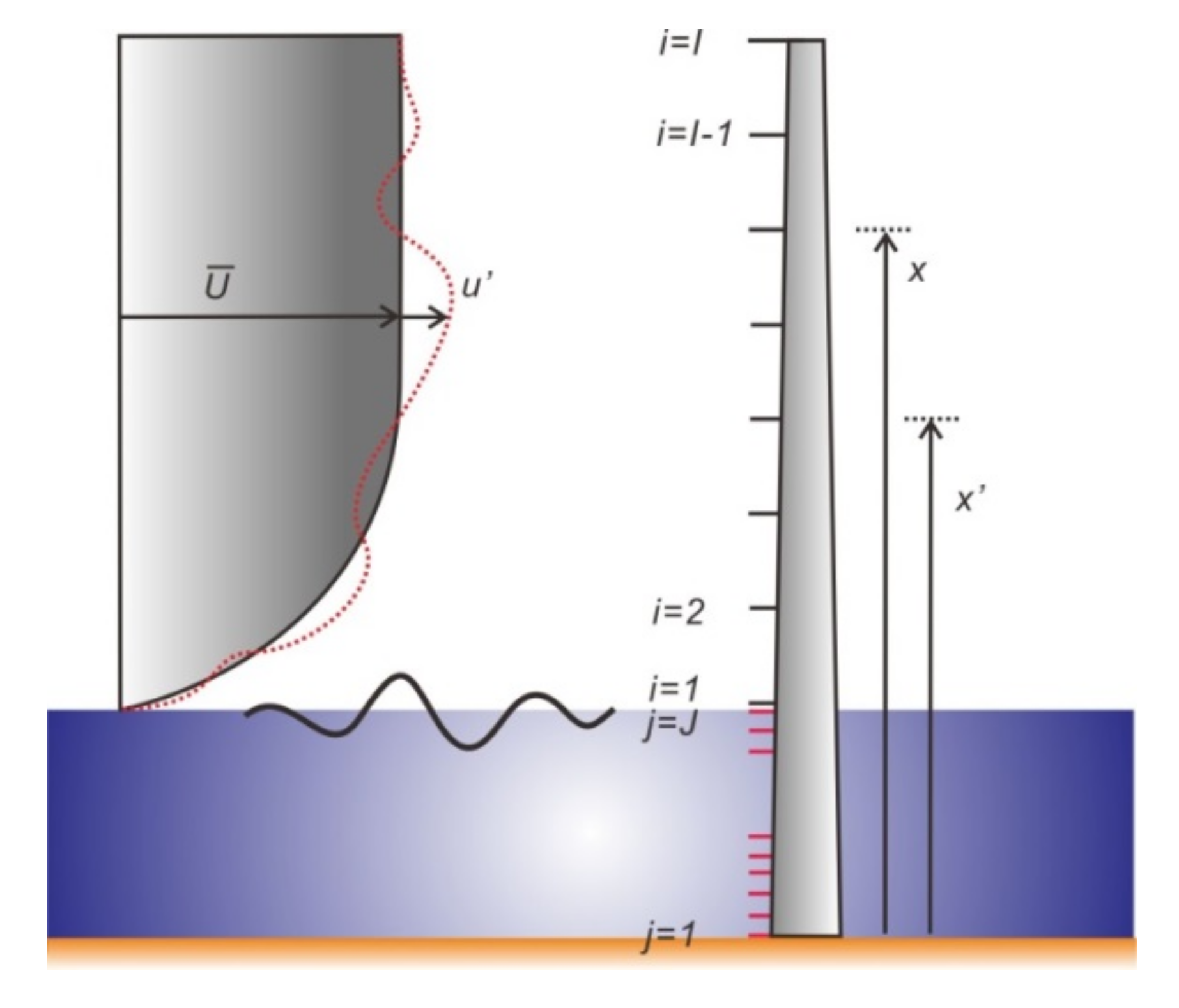
2.4. Hydrodynamic Damping
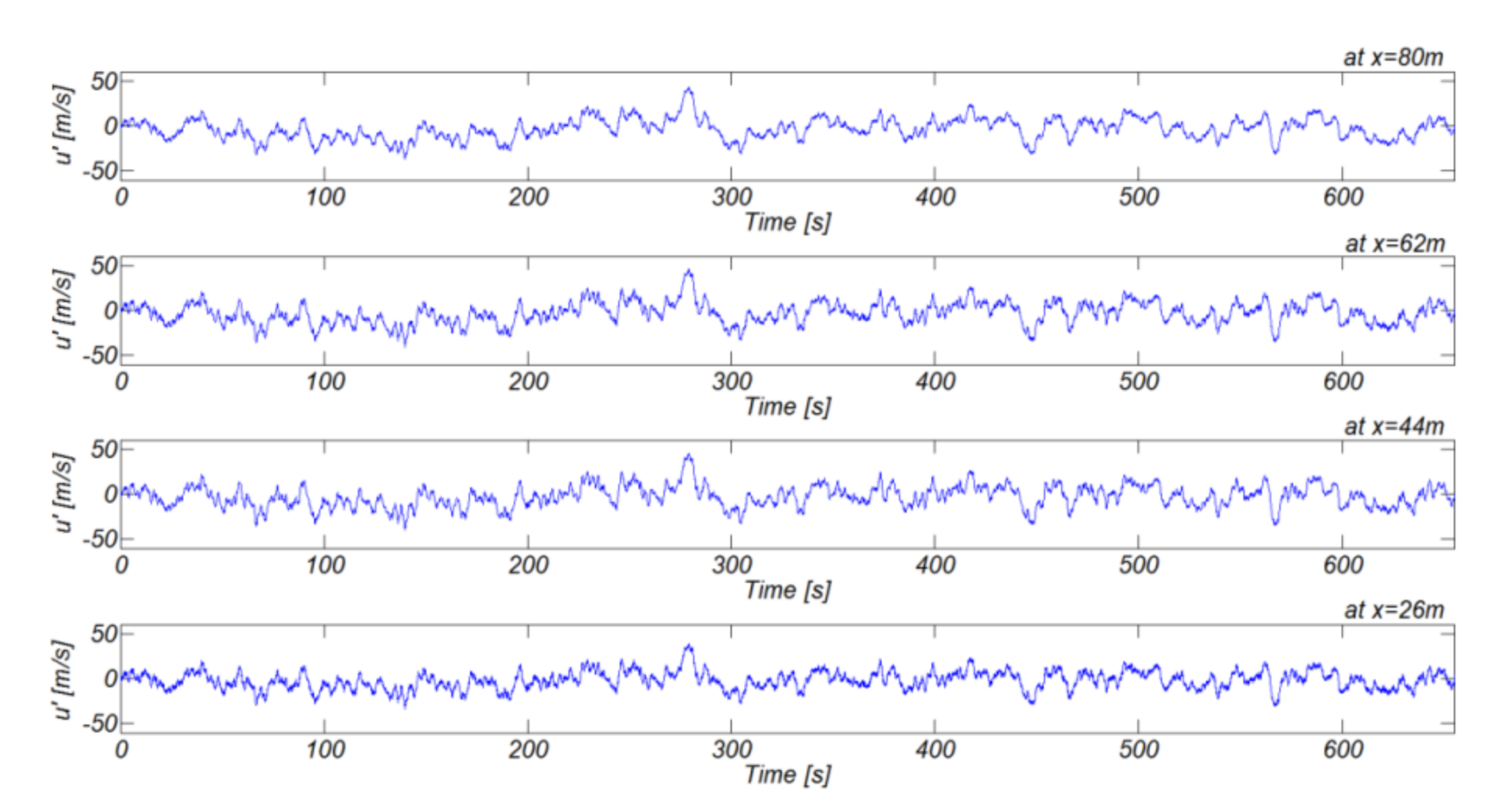
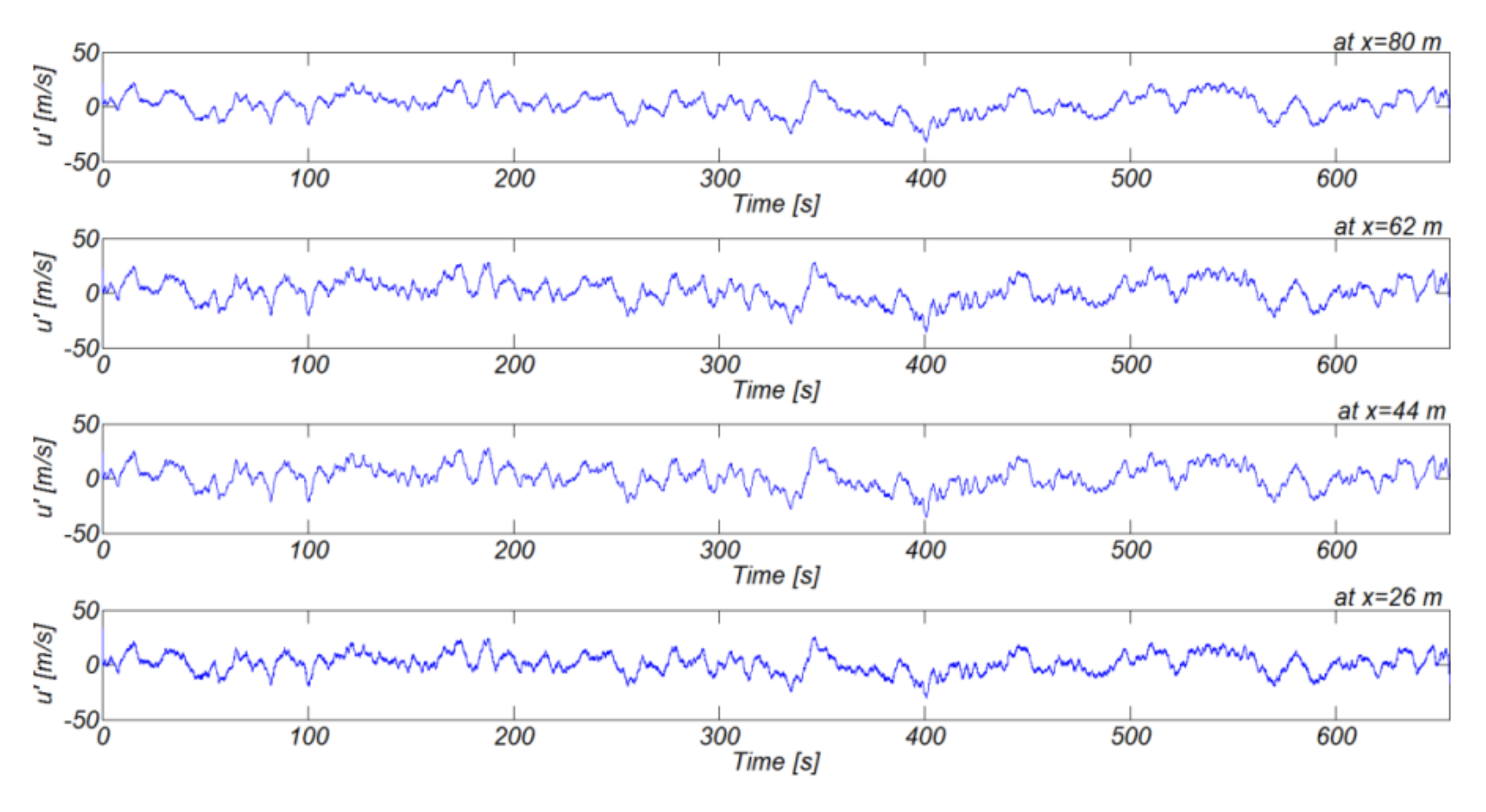
3. Monte Carlo Simulation of the Wind Velocity
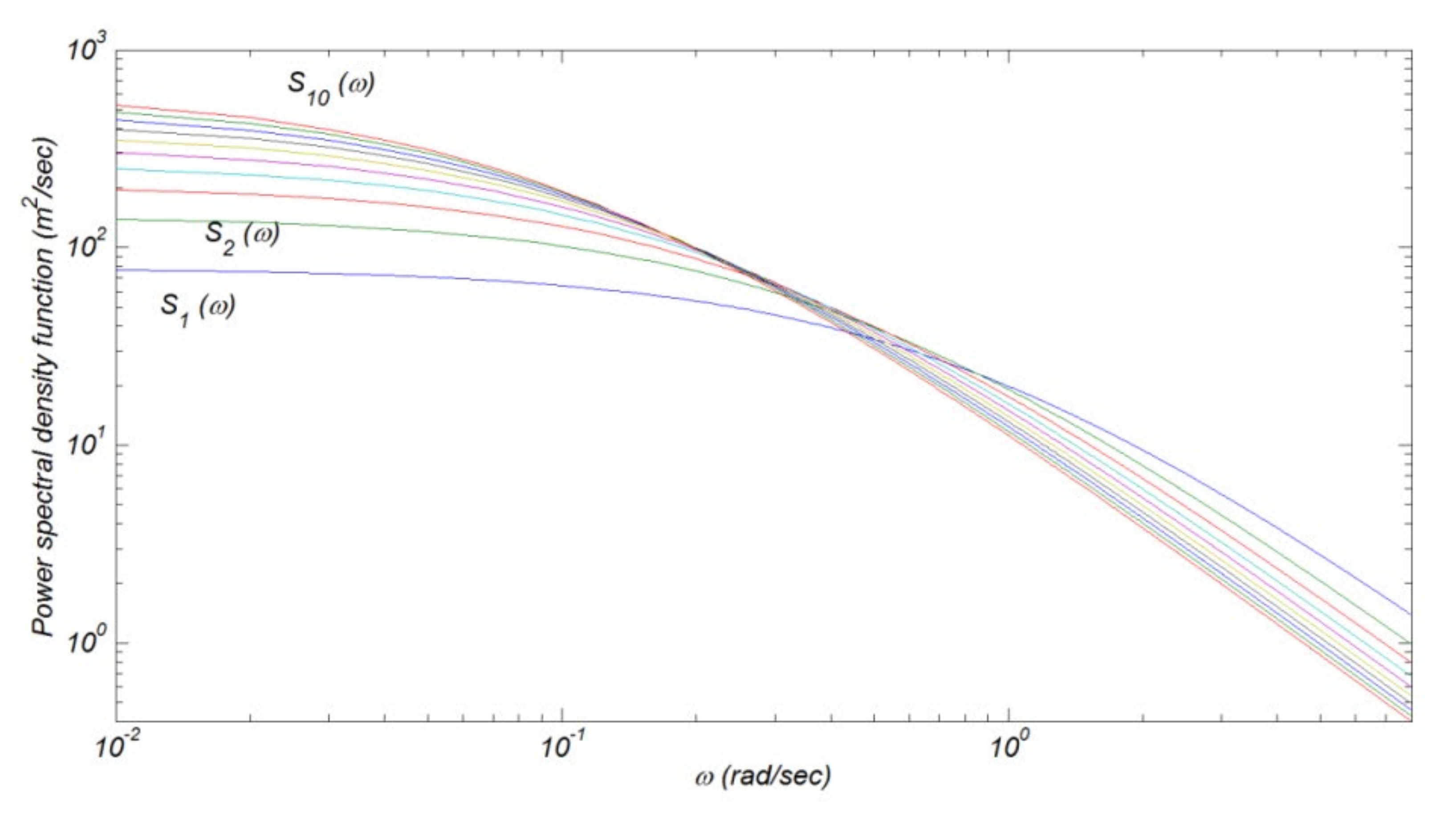
3.1. Kaimal Spectrum and Cross-Spectrum
3.2. Monte Carlo Simulation
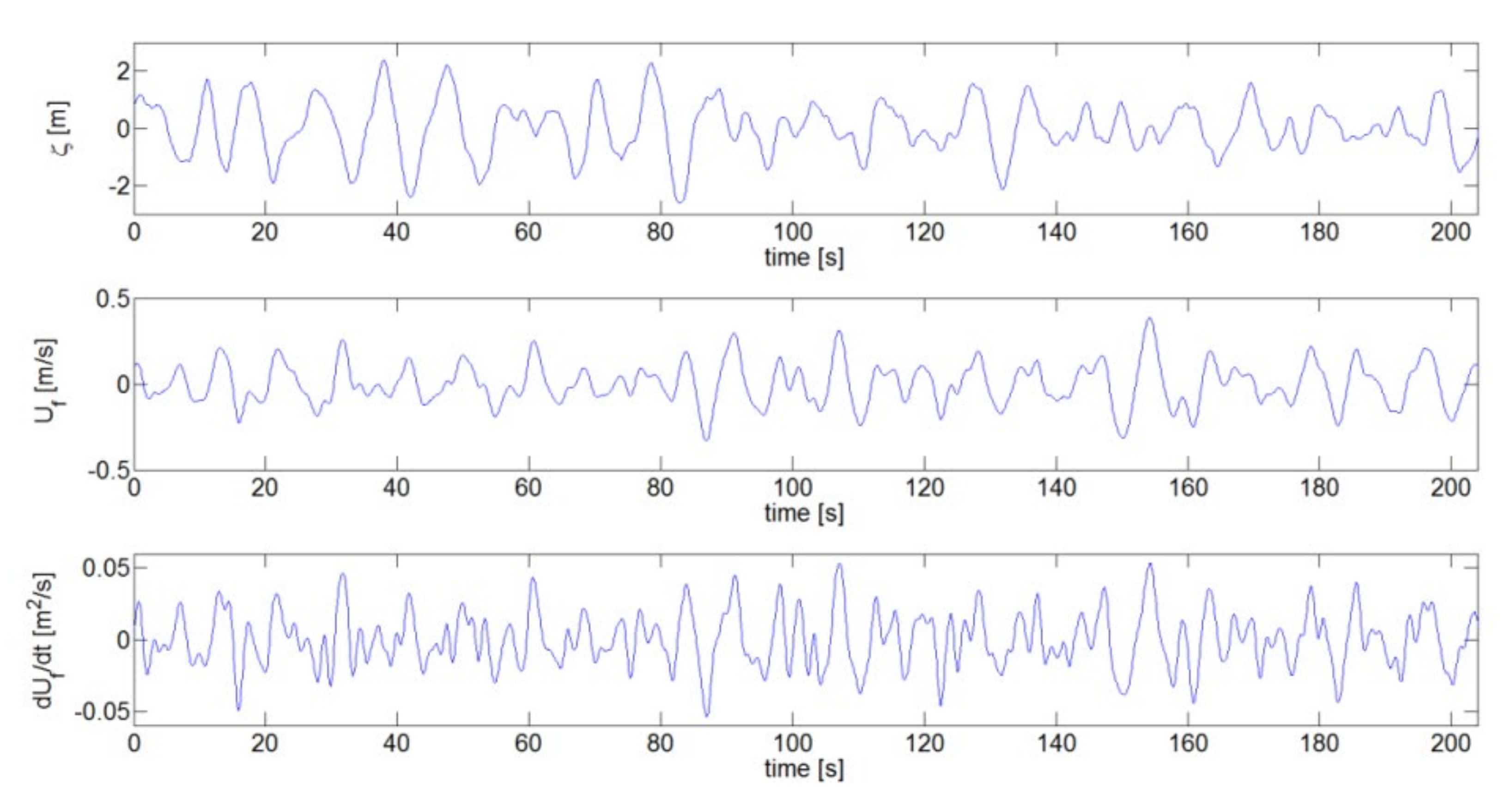
4. Numerical Simulation of Random Waves Using the Random Phase Method
- Define a target wave energy spectrum.
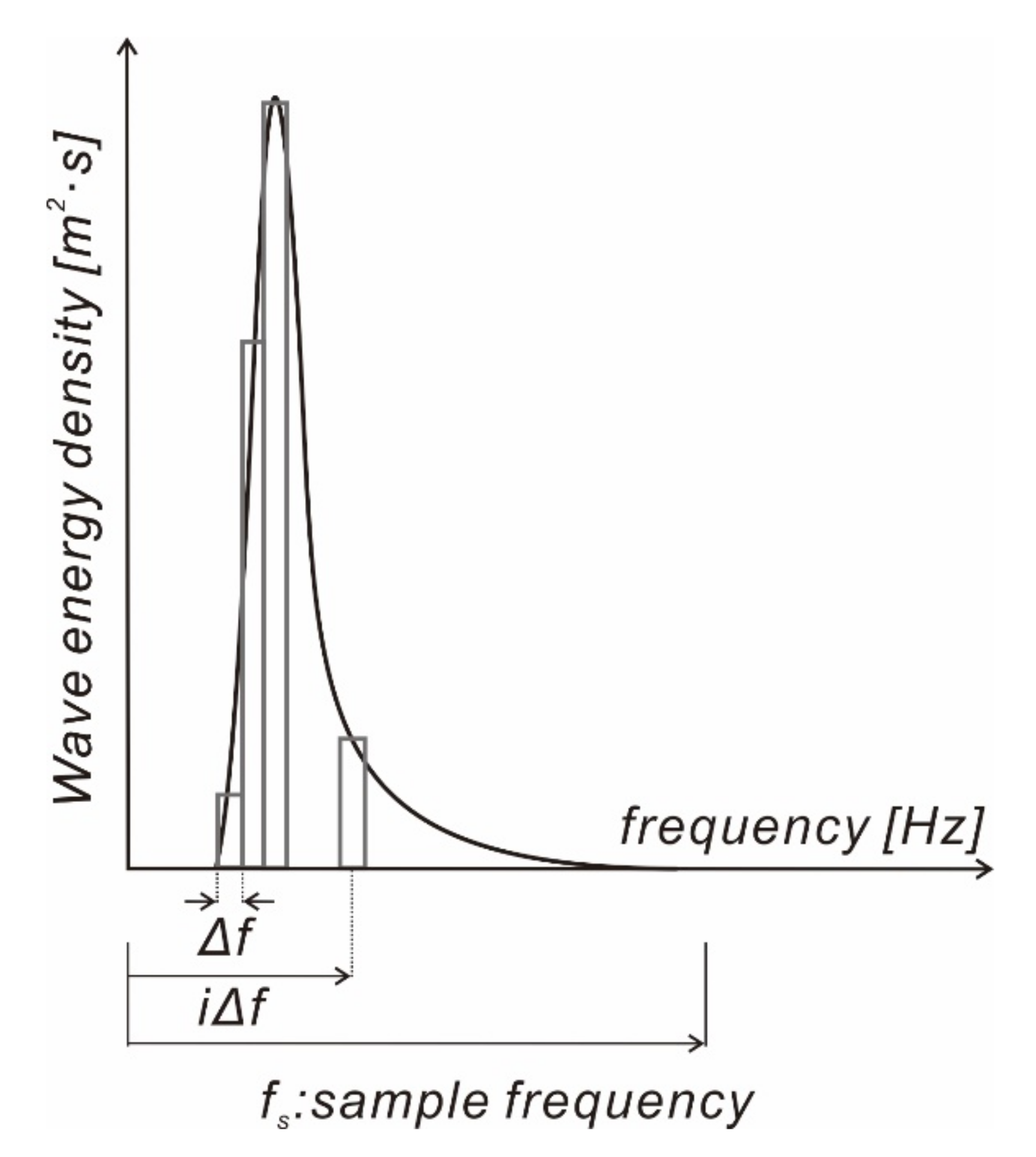
- Choose the sample frequency and the resolution of the spectrum (half the number of Fourier components) . This yields a frequency domain resolution of . The discrete wave energy spectrum can be written as (see Figure 7):
- Calculate the N complex Fourier coefficients by picking a random phase between 0 and 2π for all frequencies smaller than the Nyquist frequency . A and B are given by:
- Mirror the N Fourier components into the Nyquist frequency in order to obtain a Hermitian Fourier transformwhere the superscript * denotes a complex conjugate.
- Apply the inverse Fourier transform to and calculate the time series of the water surface displacement as follows
5. Equations of Motion for the Offshore Wind Energy Converter
6. Numerical Simulation
6.1. Numerical Results
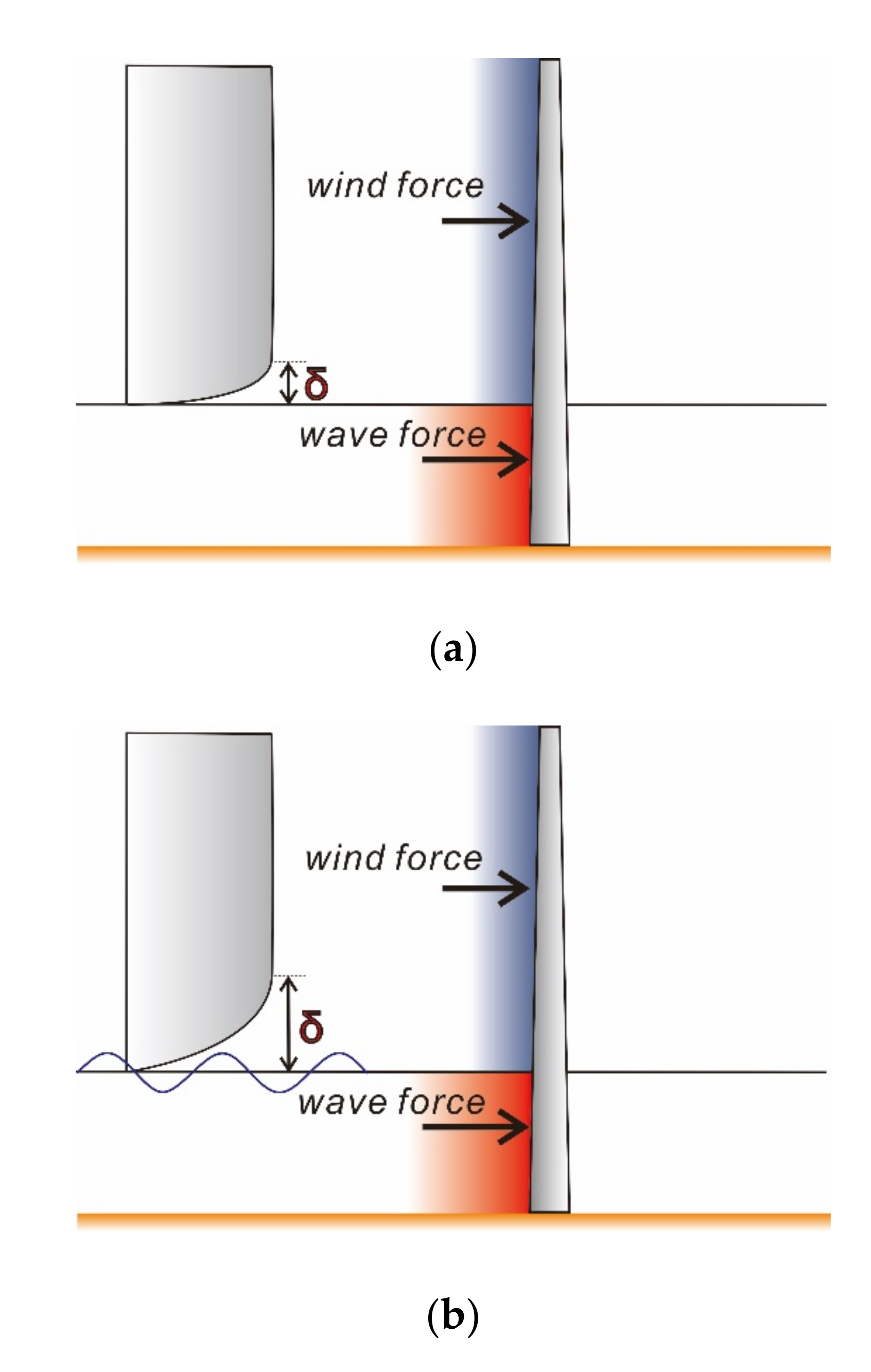
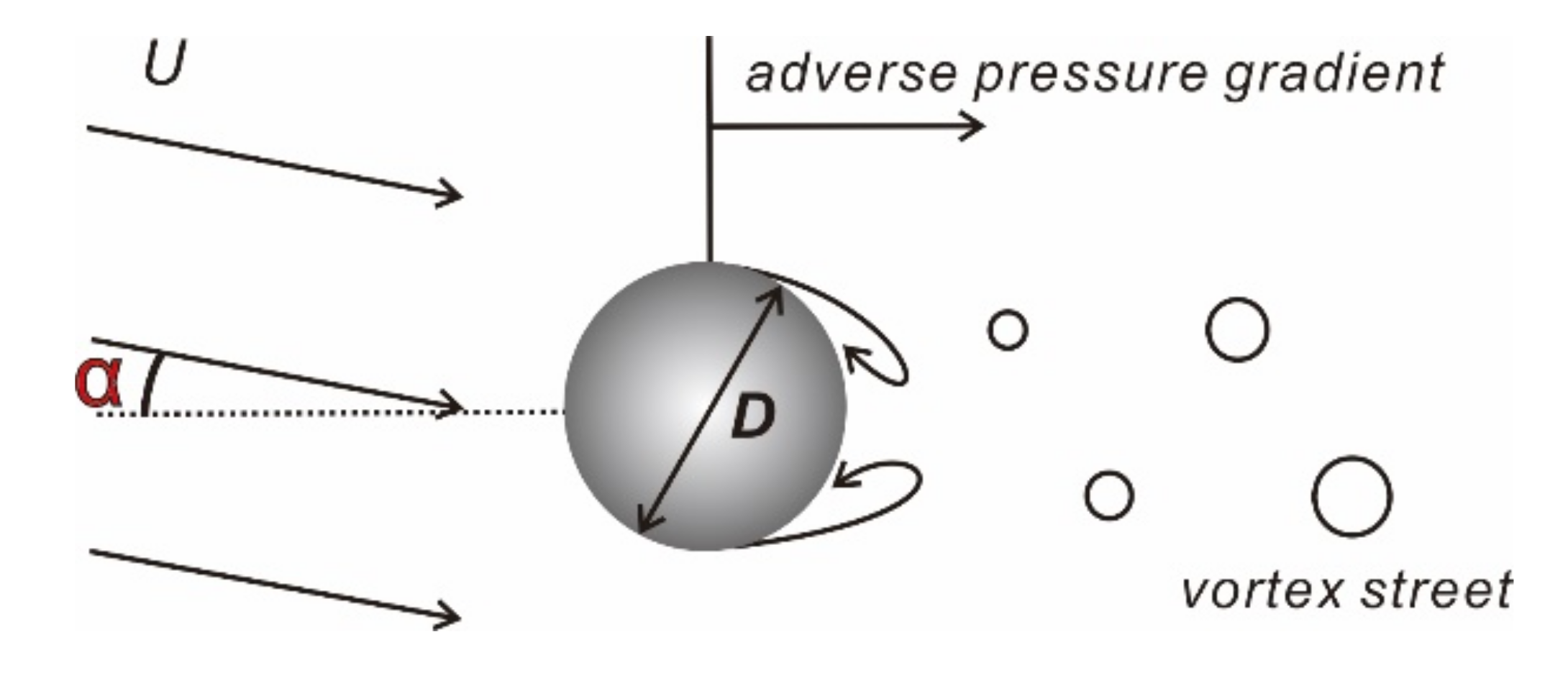
6.2. Restriction on the Deflection of the Converter Caused by the Bumpy Water Surface and the Ensuing Large Eddy
7. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Van Oord ACZ. Concept Study Bottom Protection Around Pile Foundation of 3MW Turbine; Van Oord ACZ: Rotterdam, The Netherlands, 2001. [Google Scholar]
- Van Oord ACZ. Scour Protection for 6MW OWEC with Monopile Foundation in North Sea; Van Oord ACZ: Rotterdam, The Netherlands, 2003. [Google Scholar]
- Cho, Y.J. Scour Controlling Effect of Hybrid Mono-Pile as a Substructure of Offshore Wind Turbine: A Numerical Study. J. Mar. Sci. Eng. 2020, 8, 637. [Google Scholar]
- Manenti, S.; Petrini, F. Dynamic Analysis of an Offshore Wind Turbine: Wind-Waves Nonlinear Interaction. Earth Space 2010 2010. [Google Scholar] [CrossRef]
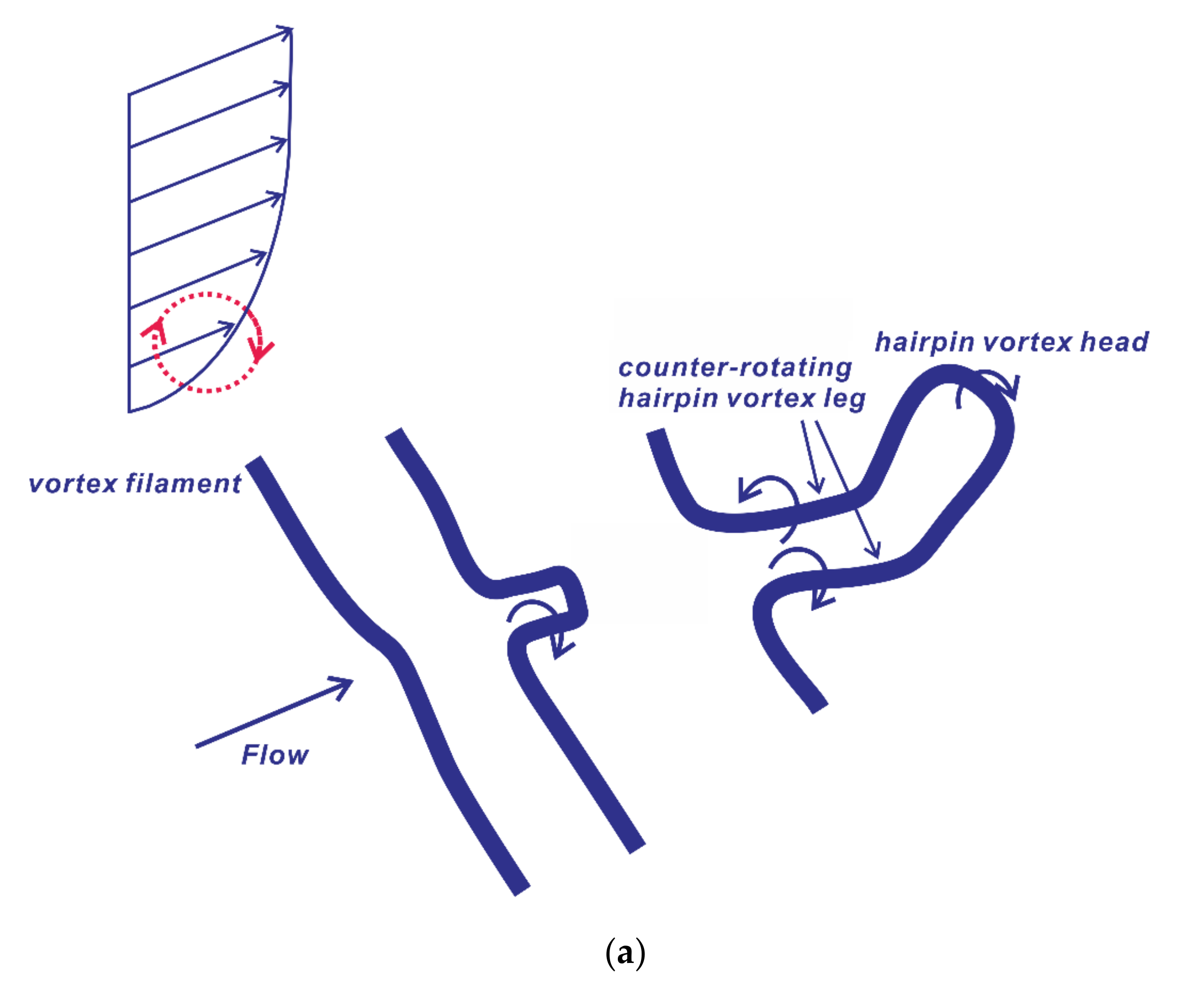
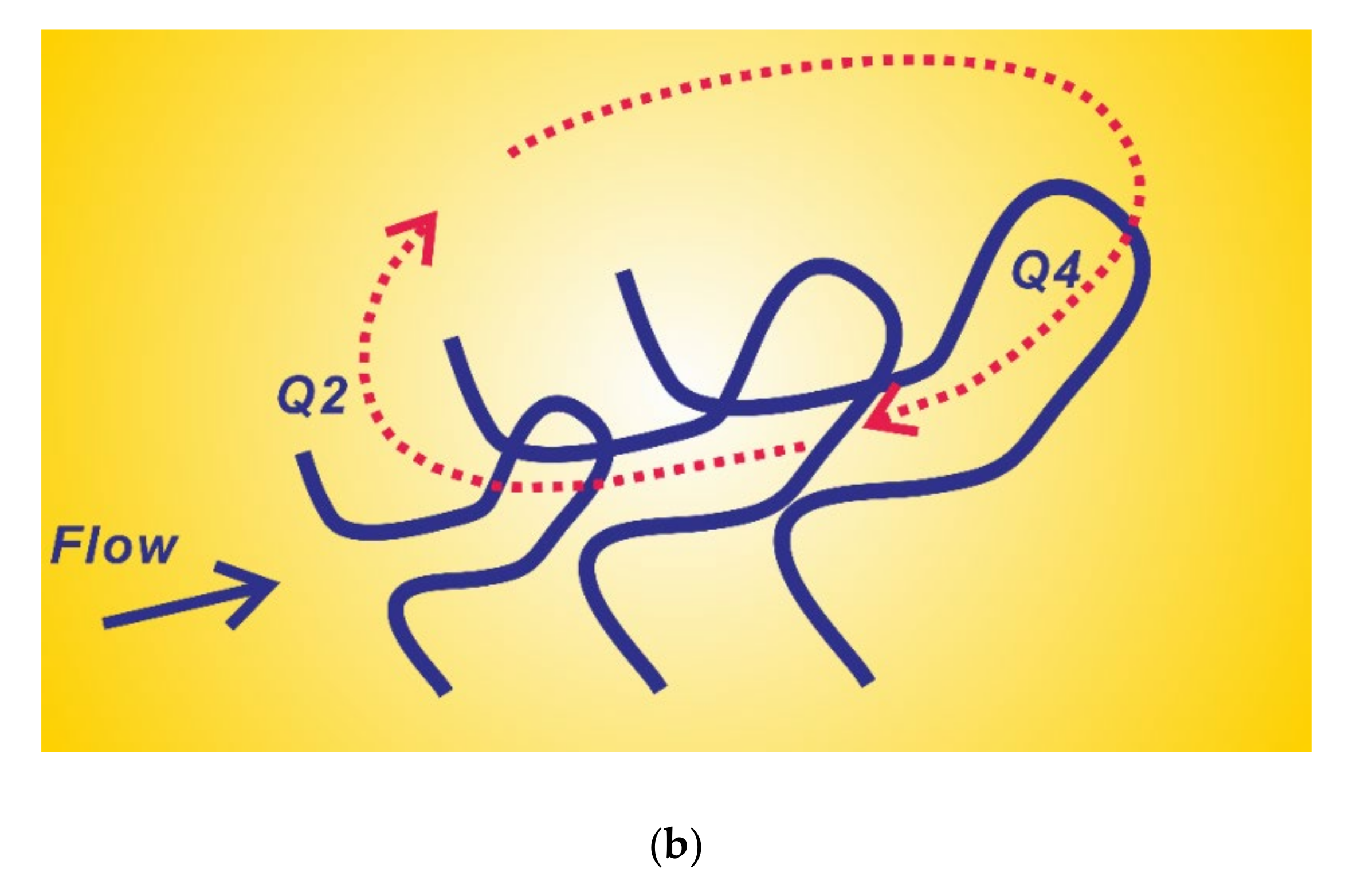
- Adrian, R.J. Hairpin vortex organization in wall turbulence. Phys. Fluids 2007, 19, 041301. [Google Scholar] [CrossRef] [Green Version]
- Adrezin, R.; Bar-Avi, P.; Benaroya, H. Dynamic Response of Compliant Offshore Structures—Review. J. Aerosp. Eng. 1996, 9, 114–131. [Google Scholar] [CrossRef]
- Cho, Y.J.; Cho, Y.J. Analysis of Nonlinear Destructive Interaction between Wind and Wave Loads Acting on the Offshore Wind Energy Converter based on the Hydraulic Model Test. J. Korean Soc. Coast. Ocean Eng. 2015, 27, 281–294. [Google Scholar] [CrossRef]
- Kim, C.H. Nonlinear Waves and Offshore Structures; World Scientific Pub Co. Pte Ltd.: Singapore, 2008. [Google Scholar]
- Morison, J.; Johnson, J.; Schaaf, S. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Sarpkaya, T.S. Wave forces on offshore structures; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Wind effects on structures: Fundamentals and applications to design. Choice Rev. Online 1997, 34, 34. [CrossRef]
- Papoulis, A. Probability, Random Variables and Stochastic Processes; McGraw-Hill book Co.: New York, NY, USA, 1965. [Google Scholar]
- Banner, M.L.; Melville, W.K. On the separation of air flow over water waves. J. Fluid Mech. 1976, 77, 825–842. [Google Scholar] [CrossRef] [Green Version]
- Cho, Y.J. Joint Distribution of the Wave Crest and Its Associated Period for Nonlinear Random Waves of Finite Bandwidth. J. Mar. Sci. Eng. 2020, 8, 654. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cho, Y.J. Numerical Analysis of Nonlinear Shoaling Process of Random Waves-Centered on the Evolution of Wave Height Distribution at the Varying Stages of Shoaling Process. J. Korean Soc. Coast. Ocean Eng. 2020, 32, 106–121. [Google Scholar] [CrossRef]
- Park, S.H.; Cho, Y.J. Joint Distribution of Wave Crest and its Associated Period in Nonlinear Random Waves. J. Korean Soc. Coast. Ocean Eng. 2019, 31, 278–293. [Google Scholar] [CrossRef] [Green Version]
- Deodatis, G. Simulation of Stochastic Processes and Fields to Model Loading and Material Uncertainties. In Dynamics of Underactuated Multibody Systems; Springer Science and Business Media LLC: Berlin, Germany, 1997; pp. 261–288. [Google Scholar]
- Kaimal, J.C.; Wyngaard, J.C.; Izumi, Y.; Cote, O.R. Spectral characteristics of surface-layer turbulence. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- Deodatis, G. Simulation of ergodic multi variate stochastic processes. J. Eng. Mechan. 1996, 122. [Google Scholar]
- Beliveau, J.G.; Shinozuka, M.; Vaicaitis, R. Motion of suspension bridge subjected to wind loads. J. Struct. Div. 1977, 103, 1189–1205. [Google Scholar]
- Frigaard, P.; Andersen, T.L. Technical Background Material for the Wave Generation Software Awasys 5, DCE Technical Reports No. 64; Aalborg University: Aalborg, Denmark, 2010. [Google Scholar]
- Cho, Y.J.; Kim, I.H. Preliminary study on the development of platform for the selection of an optimal beach stabilization measures against the beach erosion–centering on the yearly sediment budget of the Mang-Bang beach. J. Korean Soc. Coast. Ocean Eng. 2019, 31, 28–39. [Google Scholar] [CrossRef]
- Cho, Y.J.; Bae, J.H. On the Feasibility of Freak Waves Formation within the Harbor Due to the Presence of Infra-Gravity Waves of Bound Mode Underlying the Ever-Present Swells. J. Korean Soc. Coast. Ocean Eng. 2019, 31, 17–27. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1995. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 10.1314 | 2.059E + 11 | 7.980E + 3 | 1.024E + 3 | 1.05 | 1.0 | 0.5 |
| Wind | Waves | |
|---|---|---|
| RUN 1 | Random Wind [U10 = 10.13 m/s] | Random Waves [Hs = 5 m, Tp = 10 s] |
| RUN 2 | Random Wind [U10 = 10.13 m/s] | NO WAVES |
| RUN 3 | Random Wind [U10 = 10.13 m/s] | Regular Waves [H = 5 m, T = 10 s] |
| RUN 4 | Random Wind [U10 = 10.13 m/s] | Regular Waves [H = 10 m, T = 10 s] |
| RUN 5 | Random Wind [U10 = 10.13 m/s] | Regular Waves [H = 5 m, T = 5 s] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, Y.J. Nonlinear Destructive Interaction between Wind and Wave Loads Acting on the Substructure of the Offshore Wind Energy Converter: A Numerical Study. J. Mar. Sci. Eng. 2020, 8, 999. https://doi.org/10.3390/jmse8120999
Cho YJ. Nonlinear Destructive Interaction between Wind and Wave Loads Acting on the Substructure of the Offshore Wind Energy Converter: A Numerical Study. Journal of Marine Science and Engineering. 2020; 8(12):999. https://doi.org/10.3390/jmse8120999
Chicago/Turabian StyleCho, Yong Jun. 2020. "Nonlinear Destructive Interaction between Wind and Wave Loads Acting on the Substructure of the Offshore Wind Energy Converter: A Numerical Study" Journal of Marine Science and Engineering 8, no. 12: 999. https://doi.org/10.3390/jmse8120999