Abstract
We present a generalization of the Youla—Kučera parametrization to obtain all stabilizing controllers for single-input and single-output plants. This uses three parameters and can be applied to plants that may not admit coprime factorizations. In this generalization, at most two rational expressions of plants are required, while the Youla–Kučera parametrization requires precisely one rational expression.
1. Introduction
So far, the coprime factorization has played a central role to obtain stabilizing controllers in the factorization approach [1]. The factorization approach to control systems has the advantage that it includes, within a single framework, numerous linear systems such as continuous-time as well as discrete-time systems, lumped as well as distributed systems, one-dimensional as well as multidimensional systems, etc. [1,2]. A transfer function of this approach is considered as the ratio of two stable causal transfer functions. One of the attractive points of the factorization approach is the fact that all stabilizing controllers can be obtained by the Youla–Kučera parametrization with coprime factorization [3,4,5]. This Youla–Kučera parametrization has been used in a wide variety of applications for a long time (e.g., [6,7,8,9,10]).
Unfortunately, the Youla–Kučera parametrization cannot be applied to the plants that do not admit coprime factorizations. Mori, so far, gave the method to obtain part of stabilizing controllers by some different factorizations [11,12]. The objective of this paper is to generalize the Youla–Kučera parametrization to be applicable even for single-input single-output plants that may not admit the coprime factorization. This generalization employs three parameters and requires at most two rational expressions of plant, while the Youla–Kučera parametrization requires only one parameter and one rational expression of plant. The generalization will be expressed with an extension of Bézout identity. We will show that this generalization is equivalent to the parameterization method of [13], which does not require coprime factorization.
This paper is started with preliminaries from Section 2 to recall the notion of the factorization approach. We next state the main results of this paper, generalization of the Bézout identity and the Youla–Kučera parametrization, in Section 3. Then we review, in Section 4, the parametrization of stabilizing controllers of plants which may not admit coprime factorizations [13]. The proofs of the main results are given in Section 5. In Section 6, we give examples for the main results of Section 3. First example will be the plants that admit coprime factorizations. The next one will be Anantharam’s example [14]. Third one will be the discrete-time systems without the unit-delay element.
2. Preliminaries
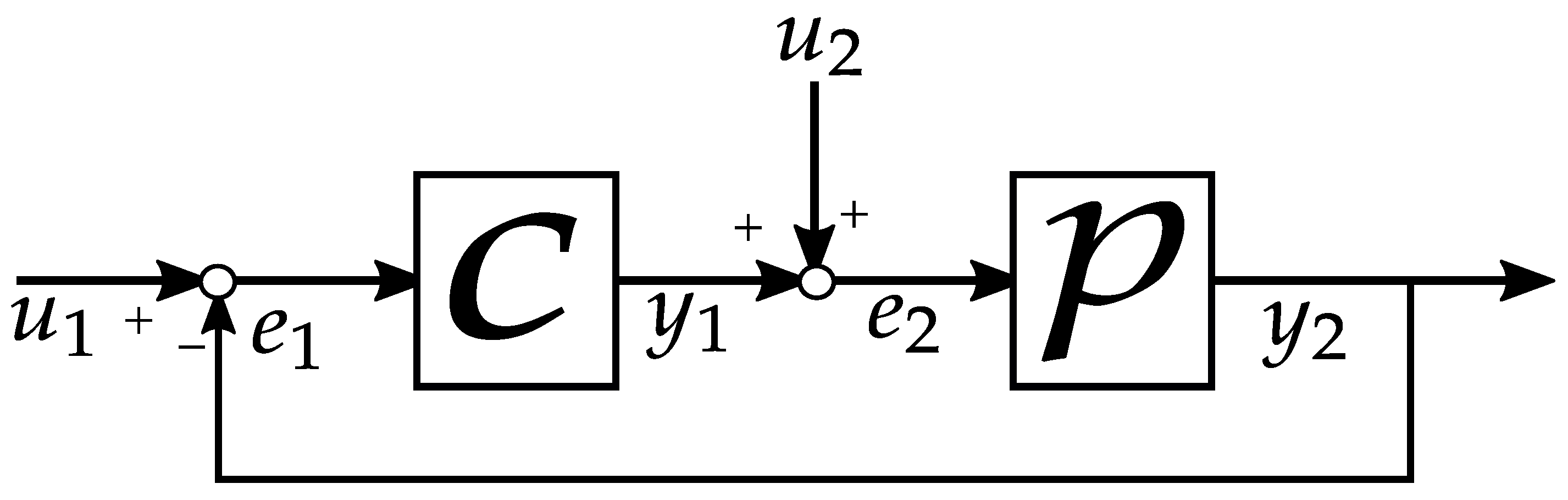
The stabilization problem considered in this paper follows that of [15,16], shown in Figure 1. In the figure, and are inputs, and outputs, and and errors. We employ the symbols used in [13,15] in general. For further details, the reader is referred to [1,2,3,4,5,6,7,8,9,10,11,12,13].
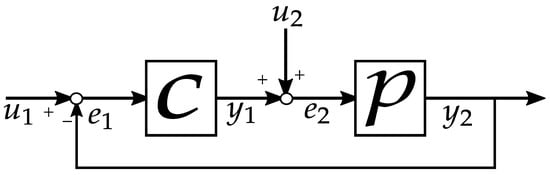
Figure 1.
Feedback System.
We consider that the set of stable causal transfer functions is an integral domain with identity, denoted by . The total field of fractions of is denoted by ; that is, . This is considered as the set of all possible transfer functions. Let be a prime ideal of with . Define the subsets and of as follows: , . Then, a transfer function in () is called causal (strictly causal).
Throughout the paper, the plant we consider has single-input and single-output, and its transfer function, which is also called a plant itself simply, is denoted by p and belongs to (that is, p is causal).
For and , a matrix is defined as
provided that is nonzero. This is the transfer matrix from to of the feedback system of Figure 1. If is nonzero and , then we say that the plant p is stabilizable, p is stabilized by c, and c is a stabilizing controller of p. In the definition above, we do not mention the causality of the stabilizing controller. Even so, it is known that if a causal plant is stabilizable, there always exists a causal stabilizing controller of the plant, and further if a strictly causal plant is stabilizable, any stabilizing controller of the plant is causal [16] [Propositions 6.1 and 6.2].
We denote by the set of all stabilizing controllers of the plant p, and by the set of ’s with all stabilizing controllers c of p. The relationship between and is as follows [17]:
Thus, obtaining and obtaining are equivalent to each other.
3. Main Results
We present three main results. The first one is a generalization of the notions of Bézout identity and coprime factorization. The others are generalizations of the Youla–Kučera parametrization that can be applied to stabilizable plants even with no coprime factorization.
Theorem 1.
Let p be a causal plant (). Then p is stabilizable if and only if there exist and of , and and of such that
with , , , of .
Theorem 2.
Theorem 3.
Let p be a stabilizable causal plant of and c its stabilizing controller. Denote
Then the set of stabilizing controllers of p is given as
Remark 1.
The fraction in (6) can be rewritten as
and, by noting that ,
Observing the fractions above, we might add new parameter of as follows:
where s and are s of (8) and (9), respectively. Even so, rearranging the numerator and denominator, we have
Since s and appear as in the form only, we can remove the parameter and consider s only.
Remark 2.
Remark 3.
An attractive point of Theorem 2 is that the set of stabilizing controllers can be obtained in the generalization form of the Youla–Kučera parametrization without the computation of coprime factorization, once the Equations (4) and (5) are obtained. On the other hand, Theorem 3 has the same attractive point once exactly one stabilizing controller is obtained.
Remark 4.
Theorems 1 and 2 are generalizations of Corollary 3.1.11 and Theorem 3.1.13 of [1], respectively.
Remark 5.
Suppose that a plant has two rational representations and with , , , . Suppose further that we have found and of such that
In this case, we can apply Theorems 1 and 2 to the plant with as special cases of Theorems 1 and 2, so that a stabilizing controller can be obtained and the set of stabilizing controllers can also be obtained. See Section 6.2 and Section 6.3 for examples.
4. Parametrization without Coprime Factorizability
Here, we briefly review the parameterization method of [13], which does not require coprime factorization. This is used to give the proof of Theorem 2.
Theorem 4.
(Single-input single-output version of Theorem 4 and Corollary 1 of [13]) Let p be a stabilizable causal plant of . Let be , where c is a fixed stabilizing controller of p. Let be a matrix defined as
with a stable causal and square matrix Q in . Then we have the identity
Then, any stabilizing controller has the form , where and are the (2,1)- and (2,2)-entries of , provided that is nonzero.
This theorem gives the parameterization with a parameter matrix Q without coprime factorizability of the plant. The parameterization by is independent of the choice of stabilizing controller c.
Decompose Q, , and in Theorem 4 as follows:
Then, by noting that , we have
In the equations above, and appears always in the form . Thus, the parameter can be removed with keeping the parameter effective, so that , , , and can be given as
Hence, noting that , we can express and as follows:
in which the parameters are , , and . In the proof of Theorem 2, we will show that the parametrization of (17) is equal to the set of ’s based on the right-hand side of (6).
5. Proofs of Theorems 1, 2 and 3
Proof of Theorem 1.
(Only If). Suppose that p is stabilizable. Then, there exists a stabilizing controller c. Thus, of (1) is over . Let
((1,1)- and (2,2)-entries of are identical).
Consider the case where is zero. This is equal to , so that . It follows that at least one of and is nonzero. Assume, without loss of generality, that is nonzero, which means that both and are nonzero. Because is nonzero, is a nonzero. Thus, is nonzero.
From the previous paragraph, we observe that the expression
is nonzero by appropriate choice of from , , . In the following, we suppose that (20) is nonzero with being one of , , .
From now, we show that the following c is a stabilizing controller of p:
This is done by showing that with c of (21) is over , which consists of , , of (19). Observe that
which are all in , so that is over . Further, is , which is nonzero. Hence, c is a stabilizing controller of p. Therefore, p is stabilizable. □
Remark 6.
Proof of Theorem 2.
Suppose that p is stabilizable.
We denote by the right-hand side of (6). We also introduce , by virtue of the relation (2), as follows:
This is expressed as follows:
(The determinant of the matrix in (22) is equal to ).
Thus, the proof of Theorem 2 is achieved by showing , which is done by showing and .
In the following, based on the proof of Theorem 1, we assume, without loss of generality, that is nonzero, where is one of , , .
(). Let
which is a stabilizing controller of p. Then is as follows:
Based on this c, we consider an element of , that is, a matrix below in the set of the right-hand side of (17) with the equations of (14), (15), and (16):
Now we let
Then, a straightforward but tedious computation shows that the matrix of (24) becomes equal to the matrix in the right-hand side of (22). Hence we have .
Proof of Theorem 3.
We consider two cases: and .
(). In this case, p is in . Then, , , and . The fraction in (7) is expressed as provided is nonzero. This is just the Youla–Kučera parametrization of the plant p in by noting that the coprime factorization of is with , , and the Bézout identity .
6. Example
6.1. Coprime Factorization
Suppose that a plant admits a coprime factorization, say and with n, d, y, . Letting , , , , , one can apply Theorems 1 and 2 to the plant in order to obtain stabilizing controllers. The expression in the right-hand side of (6) is expressed as
By replacing by new parameter u of , we have
which is equivalent to the Youla–Kučera parametrization.
6.2. Anantharam’s Example
Let us consider an example given by Anantharam in [14]. He considered the case , where denotes the set of integers. We also let be . The ring is isomorphic to and is an integral domain but not a unique factorization domain [18] (pp. 134–135). In fact, has two factorizations, and . He showed, in [14], that a plant does not admit a coprime factorization but is stabilizable and is a stabilizing controller. Then, is as follows:
Based on Theorem 3, the set of stabilizing controllers of p, of (7), is given as
By replacing , , with new parameter u of , we have
which is the same result as one shown in [19].
We can also obtain alternative parametrization from Theorem 2 based on Note 5. The plant has alternative representation . From 3 and 2, which are the numerator of and the denominator of , respectively, we can see , so that letting , , , , , , , , we have (4) and (5). Thus, (6) results
This set (32) is equal to (31) by appropriate changes of parameters r, s, t.
6.3. Discrete-Time Systems without Unit-Delay Element
Mori [16] considered the case , where denotes the set of real numbers. We also let be . This ring is an integral domain but not a unique factorization domain. In fact, has two factorizations, and .
Let us consider the plant . Now we let
of with . Then we have , , , and with . Thus, the plant p is stabilizable by Theorem 1.
7. Conclusions and Future Work
This paper has presented a generalization of the Youla–Kučera parametrization to obtain all stabilizing controllers without coprime factorization. This is based on two rational expressions of a given plant. Alternative parametrization is also given by one stabilizing controller.
As future work, we will aim to investigate further generalization of the Youla–Kučera parametrization for multi-input multi-output plants with no coprime factorizations as well. Also, the possibility to extend Theorems 1–3 will be investigated.
Funding
This research received no external funding.
Conflicts of Interest
The author declares no conflict of interest.
References
- Vidyasagar, M. Control System Synthesis: A Factorization Approach; MIT Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Mori, K. Parametrization of All Strictly Causal Stabilizing Controllers. IEEE Trans. Automat. Contr. 2009, 54, 2211–2215. [Google Scholar] [CrossRef]
- Youla, D.; Jabr, H.; Bongiorno, J., Jr. Modern Wiener-Hopf design of optimal controllers, Part I: The single-input case. IEEE Trans. Automat. Contr. 1976, 21, 3–14. [Google Scholar] [CrossRef]
- Kučera, V. Stability of discrete linear feedback systems. Proc. IFAC World Congr. 1975. [Google Scholar] [CrossRef]
- Kučera, V. A Method to Teach the Parameterization of All Stabilizing Controllers. Proc. IFAC World Congr. 2011, 44, 6355–6360. [Google Scholar] [CrossRef]
- Landau, I.; Airimţoaie, T.; Alma, M. IIR Youla–Kučera Parameterized Adaptive Feedforward Compensators for Active Vibration Control With Mechanical Coupling. IEEE Trans. Control Syst. Technol. 2013, 21, 765–779. [Google Scholar] [CrossRef]
- Sǎbau, Ş.; Martins, N. Youla–Like Parametrizations Subject to QI Subspace Constraints. IEEE Trans. Automat. Contr. 2014, 59, 1411–1422. [Google Scholar] [CrossRef]
- Blanchini, F.; Colaneri, P.; Fujisaki, Y.; Miani, S.; Pellegrino, F. A Youla–Kučera parameterization approach to output feedback relatively optimal control. Syst. Control Lett. 2015, 81, 14–23. [Google Scholar] [CrossRef]
- Doumiati, M.; Martinez, J.; Sename, O.; Dugard, L.; Lechner, D. Road profile estimation using an adaptive Youla–Kučera parametric observer: Comparison to real profilers. Control Eng. Pract. 2017, 61, 270–278. [Google Scholar] [CrossRef]
- Tang, T.; Bo, Q.; Tao, Y. Youla–Kučera Parameterization-Based Optimally Closed-Loop Control for Tip–Tilt Compensation. IEEE Sens. J. 2018, 18, 6154–6160. [Google Scholar] [CrossRef]
- Mori, K. Stabilizing Controllers from Non-Coprime Factorization for Single-Input Single-Output Plants. In Proceedings of the 2017 11th Asian Control Conference (ASCC 2017), Gold Coast, Australia, 17–20 December 2017; pp. 2459–2463. [Google Scholar]
- Mori, K. A Generalization of Coprime Factorization forObtaining Stabilizing Controllers. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 147–151. [Google Scholar]
- Mori, K. Parameterization of Stabilizing Controllers over Commutative Rings with Application to Multidimensional Systems. IEEE Trans. Circuits Syst. I 2002, 49, 743–752. [Google Scholar] [CrossRef]
- Anantharam, V. On Stabilization and the Existence of Coprime Factorizations. IEEE Trans. Automat. Contr. 1985, 30, 1030–1031. [Google Scholar] [CrossRef]
- Sule, V. Feedback Stabilization over Commutative Rings: The Matrix Case. SIAM J. Control Optim. 1994, 32, 1675–1695. [Google Scholar] [CrossRef]
- Mori, K.; Abe, K. Feedback Stabilization over Commutative Rings: Further study of coordinate-free approach. SIAM J. Control Optim. 2001, 39, 1952–1973. [Google Scholar] [CrossRef]
- Mori, K. Elementary proof of controller parametrization without coprime factorizability. IEEE Trans. Automat. Contr. 2004, 49, 589–592. [Google Scholar] [CrossRef]
- Sigler, L. Algebra; Springer-Verlag: New York, NY, USA, 1976. [Google Scholar]
- Mori, K. Controller Parameterization of Anantharam’s Example. IEEE Trans. Automat. Contr. 2004, 48, 1655–1656. [Google Scholar] [CrossRef]
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).