How Much Information Does a Robot Need? Exploring the Benefits of Increased Sensory Range in a Simulated Crowd Navigation Task


Abstract
:1. Introduction
2. Methods
2.1. Simulation Environment
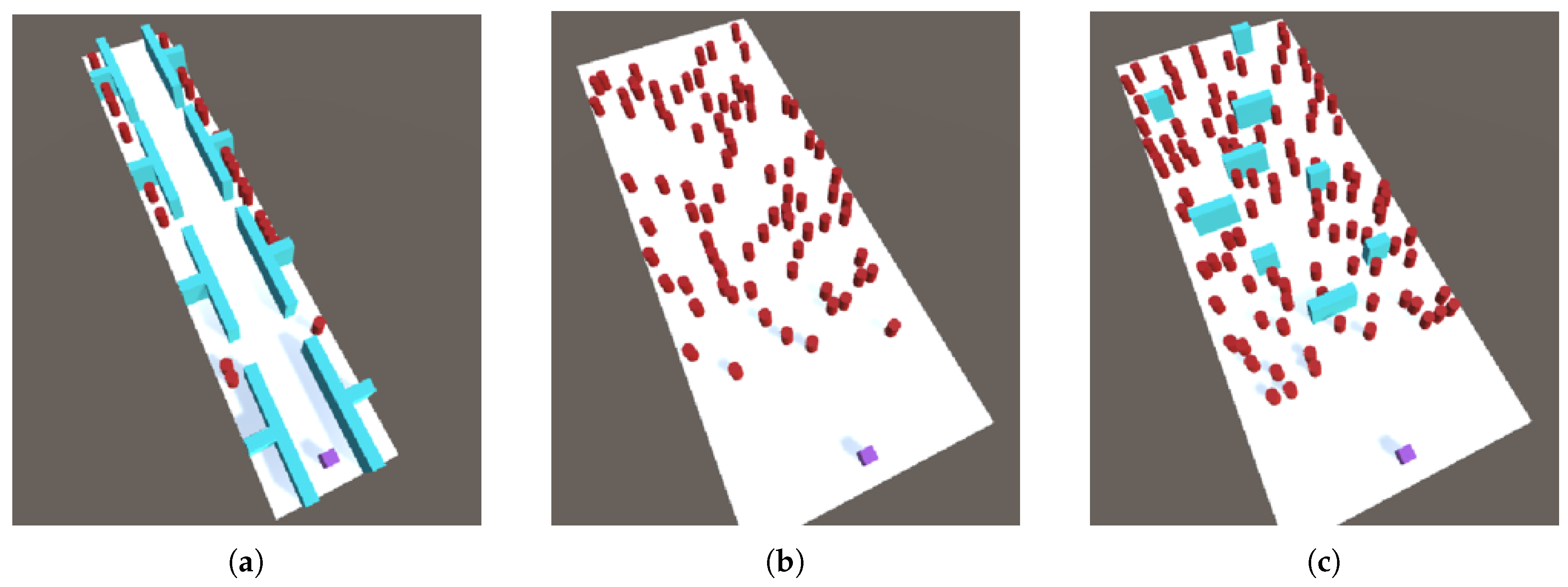
2.2. Environments
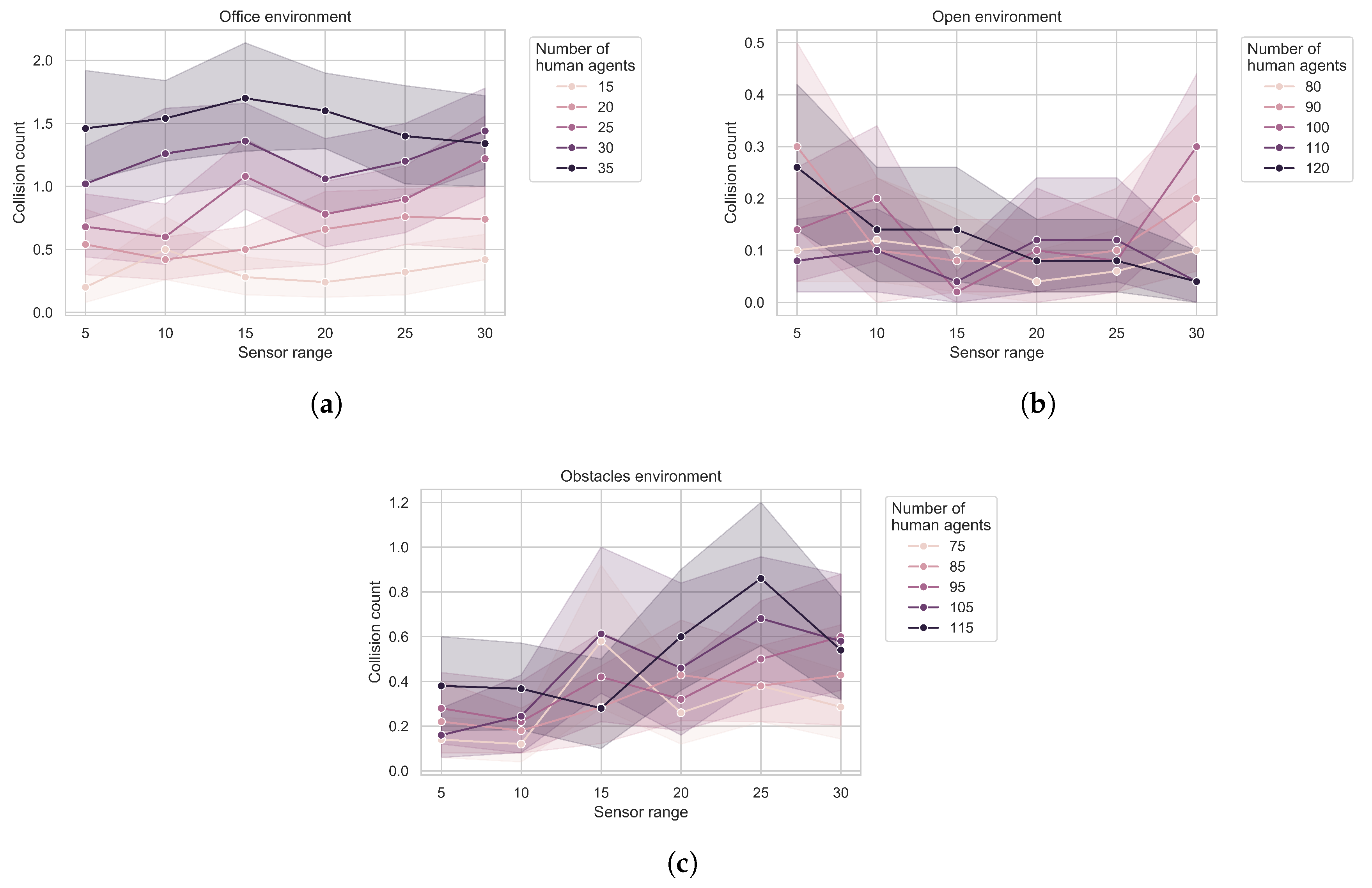
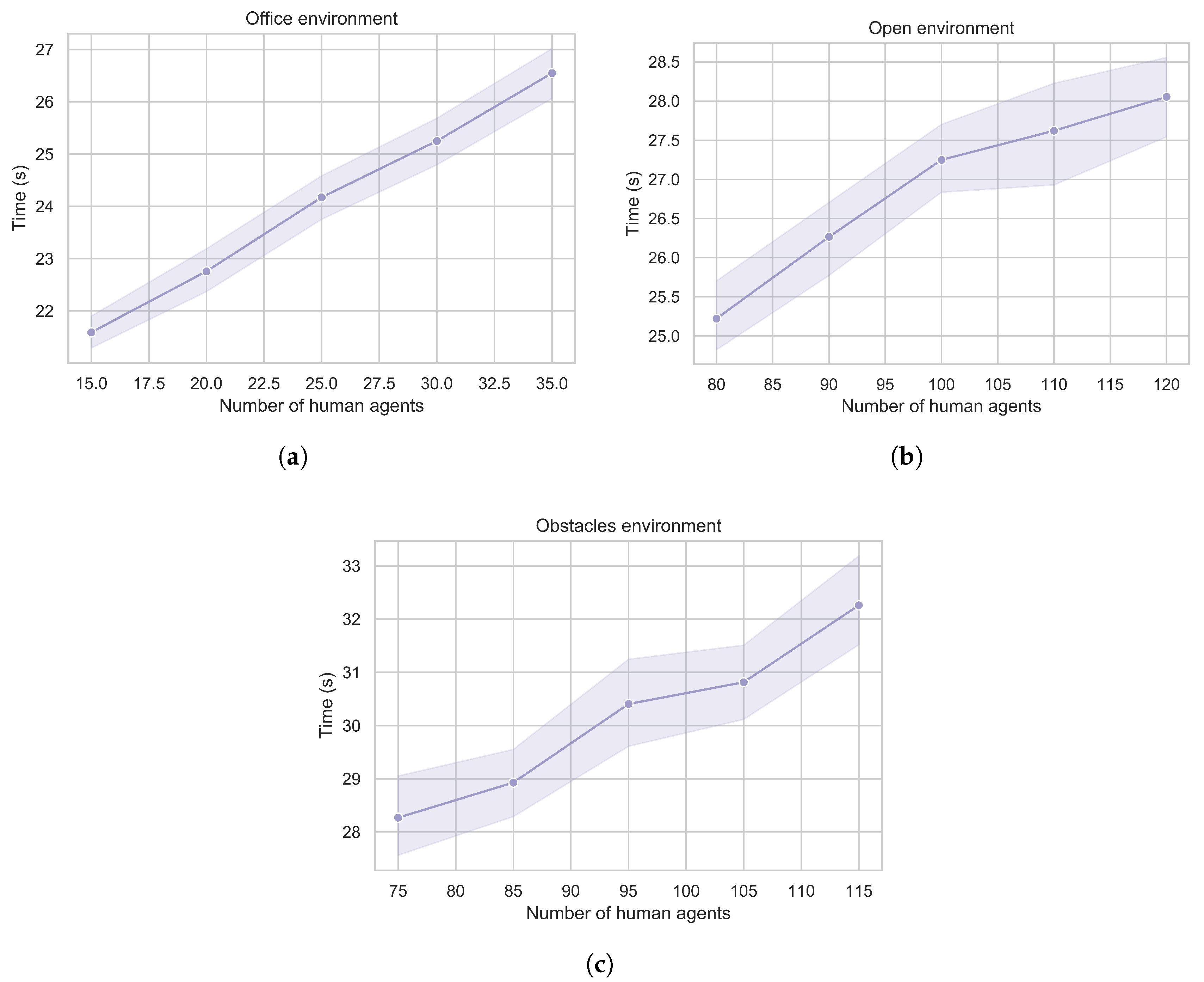
- Office environment: Simulating a narrow office corridor that can accommodate at most three agents side-by-side. Offices are rooms accessible through doorways on either side of the corridor, and all human agents spawn inside these offices, preventing the robot from perceiving them until they enter the corridor.
- Open street environment: Simulating a large, open public square. Here, the environment offers no static obstacles that restrict the movement of the agents.
- Obstacles environment: Simulating an open environment that contains a number of obstacles in the form of static objects.
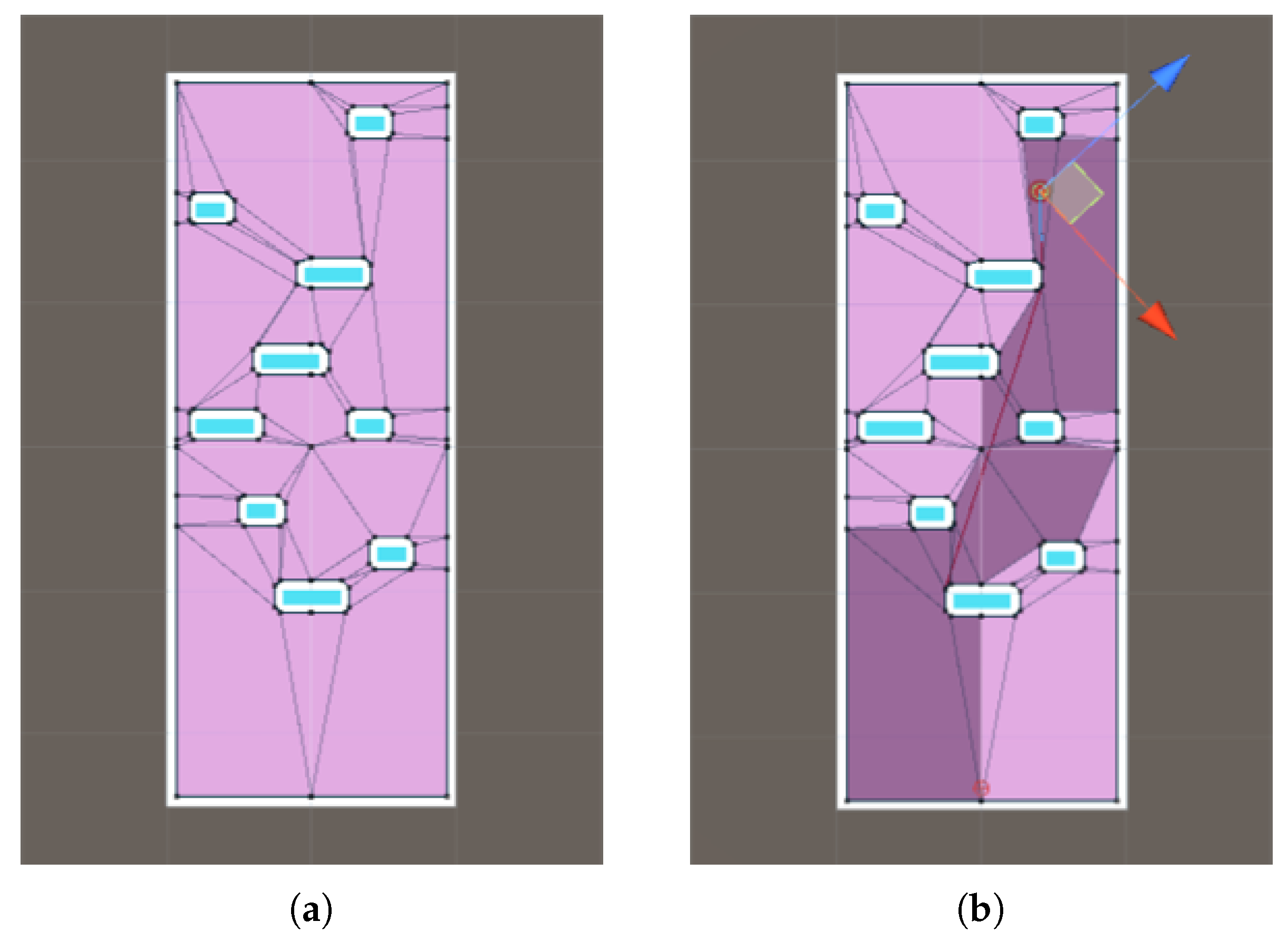
2.3. Pathfinding Algorithms
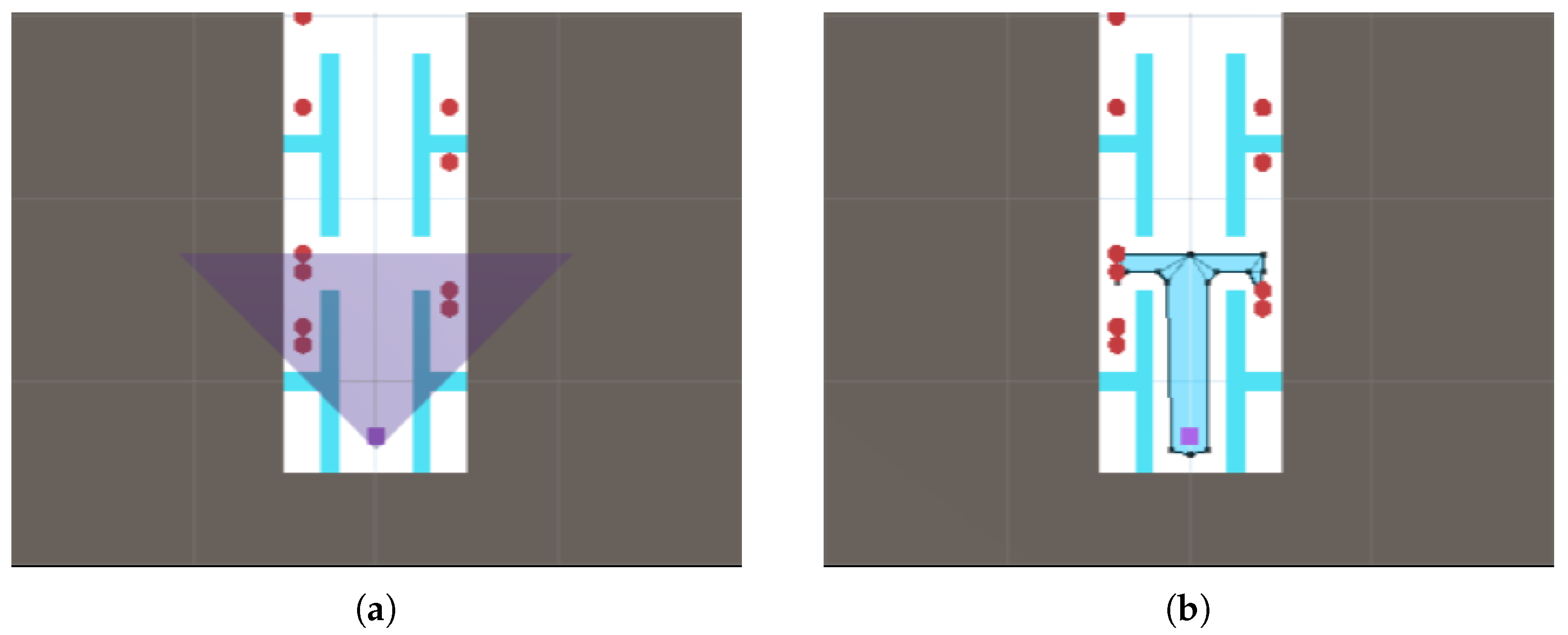
2.4. Robot Access to Information about the Environment
2.5. Experiment
2.6. Data Analysis
3. Results
3.1. Outlier Analysis
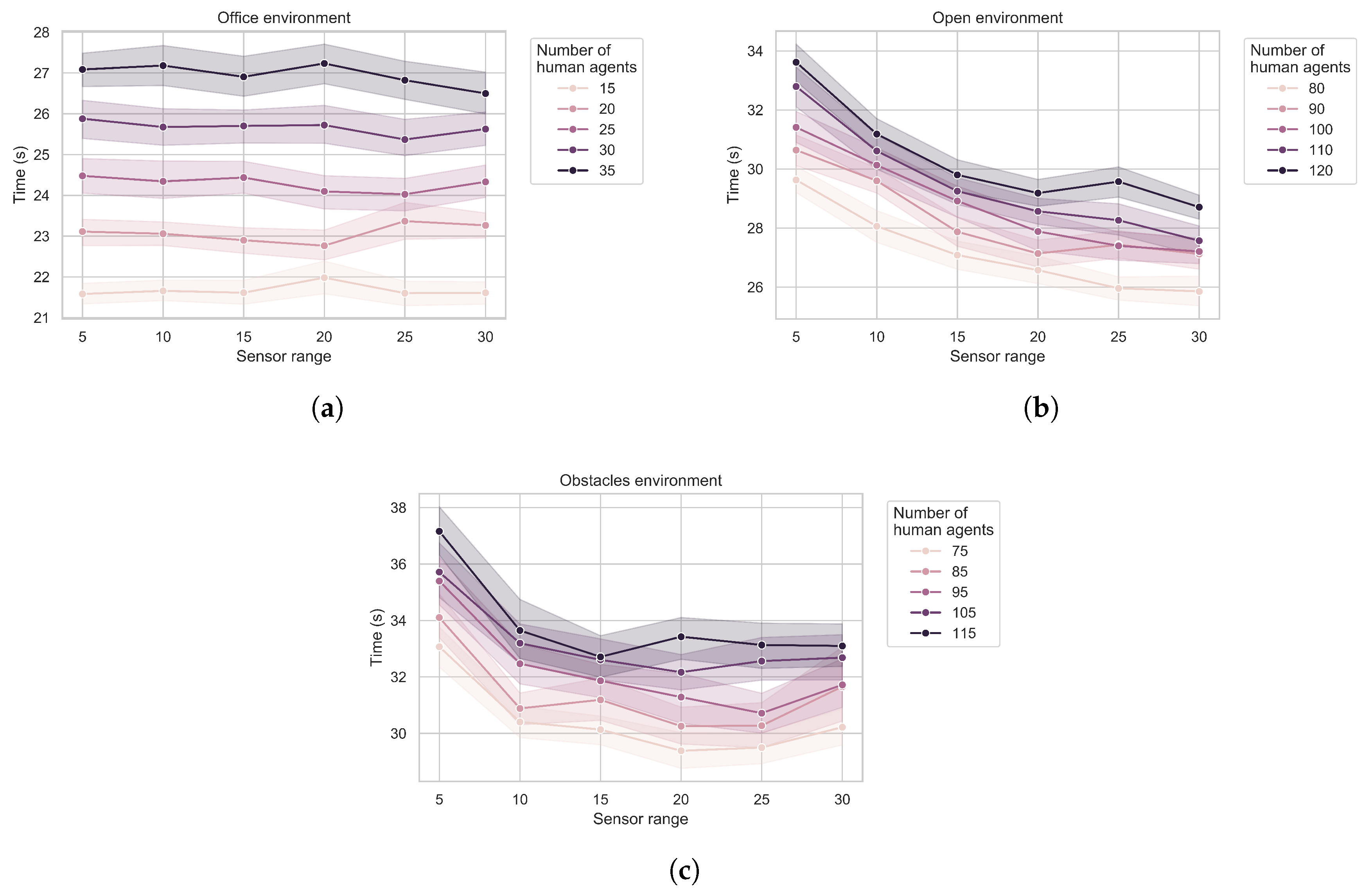
3.2. Robot Performance
3.3. Baseline Comparison
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Cabibihan, J.J.; Javed, H.; Ang, M.; Aljunied, S.M. Why Robots? A Survey on the Roles and Benefits of Social Robots in the Therapy of Children with Autism. Int. J. Soc. Robot. 2013, 5, 593–618. [Google Scholar] [CrossRef]
- Cao, H.; Esteban, P.G.; Bartlett, M.; Baxter, P.; Belpaeme, T.; Billing, E.; Cai, H.; Coeckelbergh, M.; Costescu, C.; David, D.; et al. Robot-Enhanced Therapy: Development and Validation of Supervised Autonomous Robotic System for Autism Spectrum Disorders Therapy. IEEE Robot. Autom. Mag. 2019, 26, 49–58. [Google Scholar] [CrossRef]
- Esteban, P.G.; Baxter, P.; Belpaeme, T.; Billing, E.; Cai, H.; Cao, H.L.; Coeckelbergh, M.; Costescu, C.; David, D.; De Beir, A.; et al. How to build a supervised autonomous system for robot-enhanced therapy for children with Autism Spectrum Disorder. Paladyn J. Behav. Robot. 2017, 8, 18–38. [Google Scholar] [CrossRef]
- Koceski, S.; Koceska, N. Evaluation of an Assistive Telepresence Robot for Elderly Healthcare. J. Med Syst. 2016, 40, 121. [Google Scholar] [CrossRef] [PubMed]
- Shiomi, M.; Iio, T.; Kamei, K.; Sharma, C.; Hagita, N. Effectiveness of Social Behaviors for Autonomous Wheelchair Robot to Support Elderly People in Japan. PLoS ONE 2015, 10, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Joosse, M.; Evers, V. A Guide Robot at the Airport: First Impressions. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 149–150. [Google Scholar] [CrossRef]
- Mavrogiannis, C.; Hutchinson, A.M.; Macdonald, J.; Alves-Oliveira, P.; Knepper, R.A. Effects of Distinct Robot Navigation Strategies on Human Behavior in a Crowded Environment. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 421–430. [Google Scholar] [CrossRef]
- Pourmehr, S.; Thomas, J.; Bruce, J.; Wawerla, J.; Vaughan, R. Robust sensor fusion for finding HRI partners in a crowd. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3272–3278. [Google Scholar] [CrossRef]
- Petrillo, A.; Salvi, A.; Santini, S.; Valente, A.S. Adaptive multi-agents synchronization for collaborative driving of autonomous vehicles with multiple communication delays. Transp. Res. Part C Emerg. Technol. 2018, 86, 372–392. [Google Scholar] [CrossRef]
- Cai, H.; Fang, Y.; Ju, Z.; Costescu, C.; David, D.; Billing, E.; Ziemke, T.; Thill, S.; Belpaeme, T.; Vanderborght, B.; et al. Sensing-Enhanced Therapy System for Assessing Children With Autism Spectrum Disorders: A Feasibility Study. IEEE Sens. J. 2019, 19, 1508–1518. [Google Scholar] [CrossRef] [Green Version]
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-aware robot navigation: A survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef] [Green Version]
- Trautman, P.; Krause, A. Unfreezing the robot: Navigation in dense, interacting crowds. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 797–803. [Google Scholar] [CrossRef]
- Trautman, P.; Ma, J.; Murray, R.M.; Krause, A. Robot navigation in dense human crowds: Statistical models and experimental studies of human–robot cooperation. Int. J. Robot. Res. 2015, 34, 335–356. [Google Scholar] [CrossRef] [Green Version]
- Gelbal, Ş.Y.; Altuğ, E.; Keçeci, E.F. Design and HIL setup of an autonomous vehicle for crowded environments. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AL, Canada, 12–15 July 2016; pp. 1370–1375. [Google Scholar] [CrossRef]
- Savkin, A.V.; Wang, C. Seeking a path through the crowd: Robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation. Robot. Auton. Syst. 2014, 62, 1568–1580. [Google Scholar] [CrossRef]
- Park, C.; Ondřej, J.; Gilbert, M.; Freeman, K.; O’Sullivan, C. HI Robot: Human intention-aware robot planning for safe and efficient navigation in crowds. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3320–3326. [Google Scholar] [CrossRef]
- Van den Berg, J.; Ming, L.; Manocha, D. Reciprocal Velocity Obstacles for real-time multi-agent navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Hailar, China, 28–30 July 2008; pp. 1928–1935. [Google Scholar] [CrossRef] [Green Version]
- Henry, P.; Vollmer, C.; Ferris, B.; Fox, D. Learning to navigate through crowded environments. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AL, USA, 3–8 May 2010; pp. 981–986. [Google Scholar] [CrossRef] [Green Version]
- Codd-Downey, R.; Forooshani, P.M.; Speers, A.; Wang, H.; Jenkin, M. From ROS to unity: Leveraging robot and virtual environment middleware for immersive teleoperation. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 932–936. [Google Scholar]
- Barnouti, N.H.; Al-Dabbagh, S.S.M.; Naser, M.A.S. Pathfinding in strategy games and maze solving using A search algorithm. J. Comput. Commun. 2016, 4, 15. [Google Scholar] [CrossRef] [Green Version]
- Zikky, M. Review of A*(A star) navigation mesh pathfinding as the alternative of artificial intelligent for ghosts agent on the Pacman game. EMITTER Int. J. Eng. Technol. 2016, 4, 141–149. [Google Scholar] [CrossRef] [Green Version]
- Mainprice, J.; Berenson, D. Human-robot collaborative manipulation planning using early prediction of human motion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 Novermber 2013; pp. 299–306. [Google Scholar] [CrossRef]
- Brscić, D.; Kidokoro, H.; Suehiro, Y.; Kanda, T. Escaping from Children’s Abuse of Social Robots. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 59–66. [Google Scholar] [CrossRef]
- Ha, D.; Schmidhuber, J. World Models. 2018. Available online: http://xxx.lanl.gov/abs/1803.10122 (accessed on 17 February 2020).
- Zhu, Y.; Mottaghi, R.; Kolve, E.; Lim, J.J.; Gupta, A.; Fei-Fei, L.; Farhadi, A. Target-driven visual navigation in indoor scenes using deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3357–3364. [Google Scholar] [CrossRef] [Green Version]
- Bousmalis, K.; Irpan, A.; Wohlhart, P.; Bai, Y.; Kelcey, M.; Kalakrishnan, M.; Downs, L.; Ibarz, J.; Pastor, P.; Konolige, K.; et al. Using Simulation and Domain Adaptation to Improve Efficiency of Deep Robotic Grasping. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4243–4250. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Population Levels | ||||
|---|---|---|---|---|---|
| Office | 15 | 20 | 25 | 30 | 35 |
| Street | 80 | 90 | 100 | 110 | 120 |
| Obstacles | 75 | 85 | 95 | 105 | 115 |
| Sensor Range | |||||||
|---|---|---|---|---|---|---|---|
| Env. | 5 | 10 | 15 | 20 | 25 | 30 | |
| Office | 15 | 0.80 | 0.48 | 0.62 | 0.15 | 0.87 | 0.74 |
| 20 | 0.11 | 0.17 | 0.43 | 0.93 | 0.06 | 0.03 | |
| 25 | 0.26 | 0.91 | 0.59 | 0.52 | 0.59 | 0.84 | |
| 30 | 0.12 | 0.26 | 0.16 | 0.27 | 0.91 | 0.29 | |
| 35 | 0.15 | 0.13 | 0.38 | 0.06 | 0.48 | 0.63 | |
| Open | 80 | 2.9 × 10 | 4.2 × 10 | 8.9 × 10 | 5.5 × 10 | 7.18 × 10 | 0.09 |
| 90 | 3.7 × 10 | 2.1 × 10 | 4.0 × 10 | 0.02 | 1.79 × 10 | 0.026 | |
| 100 | 4.7 × 10 | 5.6 × 10 | 3.2 × 10 | 0.20 | 0.67 | 0.934 | |
| 110 | 4.0 × 10 | 2.6 × 10 | 6.4 × 10 | 7.7 × 10 | 0.13 | 0.951 | |
| 120 | 4.1 × 10 | 8.8 × 10 | 1.1 × 10 | 4.2 × 10 | 2.2 × 10 | 0.071 | |
| Obstacle | 75 | 1.8 × 10 | 7.7 × 10 | 4.5 × 10 | 0.016 | 4.6 × 10 | 1.2 × 10 |
| 85 | 6.7 × 10 | 1.8 × 10 | 2.9 × 10 | 4.1 × 10 | 0.020 | 7.7 × 10 | |
| 95 | 7.2 × 10 | 1.2 × 10 | 1.0 × 10 | 0.096 | 0.29 | 0.01 | |
| 105 | 2.7 × 10 | 3.3 × 10 | 1.2 × 10 | 6.5 × 10 | 1.6 × 10 | 2.0 × 10 | |
| 115 | 2.2 × 10 | 0.01 | 0.09 | 5.5 × 10 | 0.06 | 0.03 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hagens, M.; Thill, S. How Much Information Does a Robot Need? Exploring the Benefits of Increased Sensory Range in a Simulated Crowd Navigation Task. Information 2020, 11, 112. https://doi.org/10.3390/info11020112
Hagens M, Thill S. How Much Information Does a Robot Need? Exploring the Benefits of Increased Sensory Range in a Simulated Crowd Navigation Task. Information. 2020; 11(2):112. https://doi.org/10.3390/info11020112
Chicago/Turabian StyleHagens, Marit, and Serge Thill. 2020. "How Much Information Does a Robot Need? Exploring the Benefits of Increased Sensory Range in a Simulated Crowd Navigation Task" Information 11, no. 2: 112. https://doi.org/10.3390/info11020112
APA StyleHagens, M., & Thill, S. (2020). How Much Information Does a Robot Need? Exploring the Benefits of Increased Sensory Range in a Simulated Crowd Navigation Task. Information, 11(2), 112. https://doi.org/10.3390/info11020112