
Operational Rule Extraction and Construction Based on Task Scenario Analysis

Abstract
:1. Introduction
2. ECA Rules
2.1. Rule Design Principles and Requirements
- (1)
- The state should be consistent before and after the rule is applied. When compiling the operational rules of the naval surface vessel, if there is any adjustment to the actions of the surface vessels, the status of the force should be saved in advance before the implementation of the rules. And after the implementation of the rules, it will resume the previously interrupted mission from the original status;
- (2)
- The format and parameters of the command action must be clear. Different from military theory, all combat instructions that require staff officers to understand and execute in actual combat must be transformed into one or more simple actions in the operational rules. Although the rules themselves can be flexible and diverse, these actions must have a limited number, clear format, and unique parameters;
- (3)
- The triggering conditions of the rules must be set reasonably. Naval surface vessel operations are no longer a linear structure formed by a series of operations such as crossing, search, tracking, or attack, but a network structure composed of multiple forces and multiple combat operations. The design rule trigger conditions should start from the change of the surface vessel status and find the perfect and unique representation method as possible;
- (4)
- The structure of the rules must be discrete and concise. The naval surface vessel operational rules are not only applied to the command-and-control system, but also applicable to the operational simulation system. Therefore, the operational rules are bound to the execution object through the dynamic parameters input by the data interface after the simulation system is running, and there is no mutual interaction between the rules;
- (5)
- The proper optimization and perfection of the set of operational rules must be adhered to. According to the development of military needs and the improvement of experimental experience, various rules will also be continuously expanded and improved. However, when adding simulation rules, correcting inappropriate rules, and merging duplicate or similar rules, the downward compatibility of the rule set should also be fully considered.
2.2. Event
2.3. Condition Template
2.4. Action Template Specification
3. Task Scenario
4. ECA Rule Extraction Process for Decision-Making Scenarios of Marine Formations
- (a)
- The state in the scene analysis diagram is transformed into an event (represented by a rectangle) or a condition (represented by a diamond) of the ECA rules, which needs to be artificially distinguished according to the actual situation.
- (b)
- Transform the conditions in the process into the conditions of the ECA rules.
- (c)
- The actions that should be performed in the scene analysis graph are transformed into the actions of the ECA rules (represented by hexagons).
5. Consistency Detection of ECA Rules
5.1. Condition Template
- (1)
- preceding (e1, e2) (or e1 = e2), c1 = c2.
- (2)
- preceding (c1, e2) (or c1 = e2), and the condition c2 is established.
5.2. Consistency Detection of ECA Rules Based on SWRL
- ⮚
- Combat operations–actions mainly check the dependence and constraints of actions. The current action can only be carried out when its prerequisite actions are completed. The action–action check mainly realizes the pre-set check of each action in the joint combat plan. Whether the time of action is consistent with the sequence of actions.
- ⮚
- Combat operations–resources check whether the resource allocation in the plan meets the resource type and quantity required by the current action. First, check the resource type’s constraints on the action, and then check the usable time of the reused resource and the resource of the consumable resource. Whether the quantity meets the needs of the action.
- ⮚
- Between combat action and force, it mainly realizes the verification of the constraints of the type and quantity of combat force on the action, which is similar to the verification of combat action-resources. First, verify whether the type of force meets the action, and then verify the satisfaction of the number of troops.
- ⮚
- The content of the verification between combat operations and targets is that combat operations must include more than one target and combat targets must be executed by more than one action.
- ➀
- If the Action (action or service) part of an ECA rule has object attribute turn-on, then after this rule is executed, the resource status will become on;
- ➁
- If the Action (action or service) part of an ECA rule has an object attribute turn-off, then after this rule is executed, the resource status will become off;
- ➂
- If the Action (action or service) part of an ECA rule has object attribute occupation, then after this rule is executed, the resource status will become busy.
- ➀
- metaR-2:
- ➁
- metaR-3:
- ➂
- metaR-4:
6. Verification Example
- (1)
- Task analysis.
- (2)
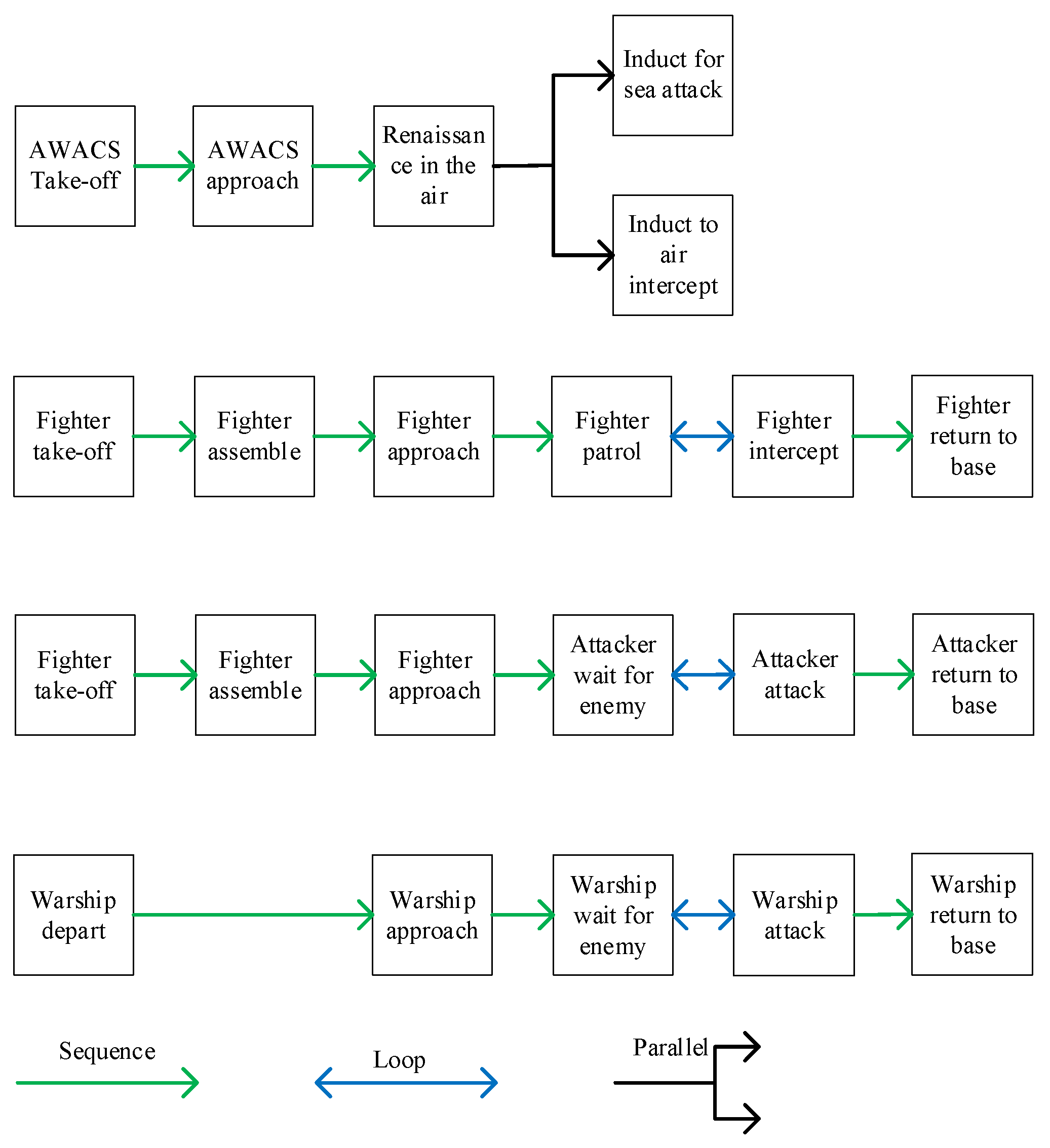
- Scene analysis.
- (3)
- Trigger event analysis.
- (1)
- State transition condition analysis.
- (2)
- Rule expression.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lu, Y.; Xu, X.; Zhang, X.; Qian, L.; Zhou, X. Hierarchical Reinforcement Learning for Autonomous Decision Making and Motion Planning of Intelligent Vehicles. IEEE Access 2020, 8, 209776–209789. [Google Scholar] [CrossRef]
- Su, X.; Zhong, M. Supply Chain Risk Prevention and Control Based on Fuzzy Influence Diagram and Discrete Hopfield Neural Network. Discret. Dyn. Nat. Soc. 2021, 2021, 1–15. [Google Scholar] [CrossRef]
- Khakzad, N. Optimal firefighting to prevent domino effects: Methodologies based on dynamic influence diagram and mathematical programming. Reliab. Eng. Syst. Saf. 2021, 212, 107577. [Google Scholar] [CrossRef]
- Weflen, E.; MacKenzie, C.A.; Rivero, I.V. An Influence Diagram Approach to Automating Lead Time Estimation in Agile Kanban Project Management. Expert Syst. Appl. 2022, 187, 115866. [Google Scholar] [CrossRef]
- Tkatek, S.; Bahti, S.; Abdoun, O.; Abouchabaka, J. Intelligent system for recruitment decision making using an alternative parallel-sequential genetic algorithm. Indones. J. Electr. Eng. Comput. Sci. 2022, 22, 385. [Google Scholar] [CrossRef]
- Smitha, R.E.; Dikeb, B.A.; Mehrac, R.K.; Ravichandranc, B.; El-Fallahc, A. Classifier systems in combat: Two-sided learning of maneuvers for advanced fighter aircraft. Comput. Methods Appl. Mech. Eng. 2000, 186, 421–437. [Google Scholar] [CrossRef]
- Chen, T. Decision-making support for transportation and logistics combining rough set fuzzy logic algorithm. J. Intell. Fuzzy Syst. 2021, 41, 1–10. [Google Scholar] [CrossRef]
- Dumitrescu, C.; Ciotirnae, P.; Vizitiu, C. Fuzzy Logic for Intelligent Control System Using Soft Computing Applications. Sensors 2021, 21, 2617. [Google Scholar] [CrossRef]
- Makarov, M.; Kuryshov, A. Researcing the Fault Tolerance of Robotic System Designed via Use of Neural Network Decision Making Component of Image Processing. In Proceedings of the 2018 Engineering and Telecommunication (EnT-MIPT), Moscow, Russia, 15–16 November 2018; pp. 197–200. [Google Scholar]
- Winkel, D.J.; Breit, H.C.; Weikert, T.J.; Stieltjes, B. Building Large-Scale Quantitative Imaging Databases with Multi-Scale Deep Reinforcement Learning: Initial Experience with Whole-Body Organ Volumetric Analyses. J. Digit. Imaging 2021, 34, 124–133. [Google Scholar] [CrossRef]
- Cheng, Y.; Song, Y. Autonomous Decision-Making Generation of UAV based on Soft Actor-Critic Algorithm. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 7350–7355. [Google Scholar]
- Bouguettaya, A.; Hafed, H.; Ahmed, Z.; Amine, M.T. Vehicle Detection From UAV Imagery With Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–21. [Google Scholar] [CrossRef]
- Hu, G. Research on the Combat Forms of Future Naval Battlefields. Mod. Radar 2019, 41, 16–20. [Google Scholar]
- Hu, L.; Liang, X.; He, L. Construction method of aviation cluster decision rule base based on scenario analysis. J. Aeronaut. 2020, 41, 723–737. [Google Scholar]
- Manning, C.D.; Surdeanu, M.; Bauer, J.; Finkel, J.; Bethard, S.J.; McClosky, D. The Stanford CoreNLP Natural Language Processing Toolkit. In Proceedings of the 52nd Annual Meeting of the Association for Computational Linguistics: System Demonstrations, Baltimore, MD, USA, 22–27 June 2014. [Google Scholar]
- Gu, F.; Jiang, D. Prediction of Political Leanings of Chinese Speaking Twitter Users. In Center for Complex Networks and Systems Research; School of Informatics and Computing: Bloomington, IN, USA, 2021. [Google Scholar]
- Wu, Q.; Li, Q.; Zhou, J.J.; Long, X.Y.; Lin, H.P. Film and TV News Digest Generation method Based on HanLP. In Proceedings of the 2020 IEEE Intl. Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking IEEE, Exeter, UK, 17 December 2020. [Google Scholar]
- Rina, D.; Fauziah, F.; Hayati, N. Aplikasi Spoxtech Untuk Penyandang Tuna Rungu Wicara Menggunakan Algoritma Hidden Markov Model dan Metode Finite State Automata (FSA). STRING 2021, 5, 236. [Google Scholar] [CrossRef]
- Paripremkul, K.; Sornil, O. Segmenting Words in Thai Language Using Minimum Text Units and Conditional Random Field; Graduate School of Applied Statistics, National Institute of Development Administration (NIDA): Thailand, Bangkok, 2021; Volume 12. [Google Scholar]
- Morfouace, P.; Séréville, N.; Flavigny, F.; Labiche, M.; Shearman, R. NPTool: A simulation and analysis framework for low-energy nuclear physics experiments. J. Phys. G Nucl. Part. Phys. 2016, 43, 045113. [Google Scholar]
- Huang, B.; Bai, Y.; Zhou, X. Hub at SemEval-2021 Task 1: Fusion of Sentence and Word Frequency to Predict Lexical Complexity. In Proceedings of the 15th International Workshop on Semantic Evaluation (SemEval-2021), Bangkok, Thailand, 5–6 August 2021. [Google Scholar]
- Wan, I.P.; Allassonnière-Tang, M. The Effect of Word Frequency and Position-in-Utterance in Mandarin Speech Errors: A Connectionist Model of Speech Production; Cambridge University Press: Cambridge, UK, 2021. [Google Scholar]
- Bolshakova, E.; Loukachevitch, N.; Nokel, M. Topic models can improve domain term extraction. In European Conference on Information Retrieval; Springer: Berlin, Heidelberg, 2013; pp. 684–687. [Google Scholar]
- Sawczyn, A.; Binkowski, J.; Janiak, D.; Augustyniak, Ł.; Kajdanowicz, T. Fact-checking: Relevance assessment of references in the Polish political domain. Procedia Comput. Sci. 2021, 192, 1285–1293. [Google Scholar] [CrossRef]
- Haque, R.; Penkale, S.; Way, A. TermFinder: Log-likelihood comparison and phrase-based statistical machine translation models for bilingual terminology extraction. Lang Resour. Eval. 2018, 52, 365–400. [Google Scholar] [CrossRef]
- Cohen, J.D. Highlights: Language-and domain-independent automatic indexing terms for abstracting. J. Am. Soc. Inf. Sci. 1995, 45, 162–174. [Google Scholar] [CrossRef]
- Bae, J.; Bae, H.; Kang, S.; Kim, Y. Automatic control of workflow processes using ECA rules. IEEE Trans. Knowl. Data Eng. 2004, 16, 1010–1023. [Google Scholar]
- Bak, N.; Chang, B.-M.; Choi, K. Smart Block: A visual block language and its programming environment for IoT. J. Comput. Lang. 2020, 60, 100999. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Hao, W. Intelligent decision-making method for combat operations of tactical-level war chess entities. Control Decis. 2020, 35, 2977–2985. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Name | Remark |
|---|---|
| Rule (?r) | r is a rule |
| FamilyService (?fs) | fs is a subclass of the FamilyService class |
| Property (?p) | p is an object attribute (operation on resources) |
| Resource (?res) | res is a subclass of Resource |
| hasService (?r, ?Is) | Rule r has service fs |
| hasProperty (?fs, ?p) | Service fs has object attribute p |
| hasConstraint (?p, ?res) | Object attribute p has attribute constraints res |
| resConsumption (?fs, ?res) | Service fs consumes resources res |
| Changestate (?res, ?s) | The status of resource res becomes s |
| Event | Event Name | Remark |
|---|---|---|
| e1 | Takeoff order received | The plane received a takeoff order |
| e2 | Reach height | The plane reaches the specified altitude |
| e3 | Arriving in the airspace | Plane arrives in designated airspace |
| e4 | Assembled | The aircraft is assembled |
| e5 | Forward order received | The aircraft received a forward order |
| ej6 | Fighter arrives in patrol airspace | The plane arrives at the designated patrol airspace |
| ej7 | Receipt of interception order | Fighter received intercept order |
| e8 | Received return order | Received return order |
| ey4 | Aerial threat found | Early warning detection of aerial threats |
| ey5 | Discover and identify the target of the attack | The early warning aircraft found and identified the target of the attack |
| ey6 | mission completed | The attack target reaches the specified damage level, and the attack mission is completed |
| eg6 | Attack aircraft arrives in standby airspace | The attack aircraft arrives in the designated standby airspace |
| eg7 | Attack order received | The attack aircraft received the command to attack the sea |
| es1 | Receipt of sailing order | Warship received an order to sail |
| es2 | Arrived in the standby area | Warship arrives in the standby area |
| es3 | Attack order received | Warship receives an order to attack the sea |
| State Transfer | Event | Transfer Condition | Execution Action | Etraction Rule |
|---|---|---|---|---|
| Sj0→Sj1 | e1 | cj1: Fighter received takeoff order | a1: take off | Rj1 |
| Sj1→Sj2 | e2 | cj2: The fighter plane reaches the predetermined height | a2: flight | Rj2 |
| Sj2→Sj3 | e3 | cj3: Fighter arrives in the assembly airspace | a3: Assemble | Rj3 |
| Sj3→Sj4 | e4 | cj4: Fighter assembly is complete | a4: The report is assembled | Rj4 |
| Sj4→Sj5 | e5 | cj5: Fighter receives forward order | a2: flight | Rj5 |
| Sj5→Sj6 | ej5 | cj6: Fighter arrives in patrol airspace | aj6: patrol | Rj6 |
| Sj6→Sj6 | ej6 | cj7: Fighter received intercept order | aj7: Air intercept | Rj7 |
| Sj6→S8 | e8 | cj8: Fighter received a return order | a8: Return home | Rj8 |
| Sy0→Sy1 | e1 | cy1: AWACS received takeoff order | a1: take off | Ry1 |
| Sy1→Sy2 | e2 | cy2: AWACS reached a predetermined height | a2: flight | Ry2 |
| Sy2→Sy3 | e3 | cy3: AWACS arrives at the scheduled airspace | ay3: Reconnaissance search | Ry3 |
| Sy3→Sy3 | ey4 | cy4: An early warning aircraft detects an air threat^The fighter plane arrives in the patrolled airspace | ay4: Guide fighter interception | Ry4 |
| Sy3→Sy3 | ey5 | cy5: The early warning aircraft finds and recognizes the attack target^The attack aircraft arrives in the attack airspace^Warship arrives in the standby area | ay5: Guide attack aircraft and surface ships to attack the sea | Ry5 |
| Sy3→S8 | ey6 | cy6: All assault targets have reached the level of damage | a8: Return home | Ry8 |
| Sg0→Sg1 | e1 | cg1: Attack aircraft received takeoff order | a1: take off | Rg1 |
| Sg1→Sg2 | e2 | cg2: The attack aircraft reaches the specified altitude | a2: flight | Rg2 |
| Sg2→Sg3 | e3 | cg3: The attack aircraft arrives in the assembly airspace | a3: Assemble | Rg3 |
| Sg3→Sg4 | e4 | cg4: Attack aircraft assembled | a4: The report is assembled | Rg4 |
| Sg4→Sg5 | e5 | cg5: The attacker received the forward order | a2: flight | Rg5 |
| Sg5→Sg6 | eg6 | cg6: Attack aircraft arrives in standby airspace | ag6: Air standby | Rg6 |
| Sg6→Sg6 | eg7 | cg7: Attacking aircraft received an attack command | ag7: Attack aircraft to sea attack | Rg7 |
| Sg6→S8 | e8 | cj8: Attack aircraft received a return order | a8: Return home | Rg8 |
| Ss0→Ss1 | es1 | cs1: Warship received an order to sail | as1: Surface ships set sail | Rs1 |
| Ss1→Ss2 | es2 | cs2: Warship arrives in the standby area | as2: Surface ship standby | Rs2 |
| Ss2→Ss2 | es3 | cs3: Warship receives an attack order | as3: Surface ship to sea attack | Rs3 |
| Ss2→S8 | e7 | cs4: Surface ship receives order to return | a8: Return home | Rs4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Wang, C.; Cui, P.; Sun, G. Operational Rule Extraction and Construction Based on Task Scenario Analysis. Information 2022, 13, 144. https://doi.org/10.3390/info13030144
Zhao X, Wang C, Cui P, Sun G. Operational Rule Extraction and Construction Based on Task Scenario Analysis. Information. 2022; 13(3):144. https://doi.org/10.3390/info13030144
Chicago/Turabian StyleZhao, Xinye, Chao Wang, Peng Cui, and Guangming Sun. 2022. "Operational Rule Extraction and Construction Based on Task Scenario Analysis" Information 13, no. 3: 144. https://doi.org/10.3390/info13030144
APA StyleZhao, X., Wang, C., Cui, P., & Sun, G. (2022). Operational Rule Extraction and Construction Based on Task Scenario Analysis. Information, 13(3), 144. https://doi.org/10.3390/info13030144