
A Simplistic and Cost-Effective Design for Real-World Development of an Ambient Assisted Living System for Fall Detection and Indoor Localization: Proof-of-Concept


Abstract
:1. Introduction
- It presents a simplistic design paradigm for an AAL system that can capture multimodal components of user behaviors during ADLs that are necessary for performing fall detection and indoor localization in a simultaneous manner in the real world. A comprehensive comparative study with prior works in the fields of indoor localization and fall detection is presented in this paper, which shows how this proposed system outperforms prior works in the fields of indoor localization and fall detection in terms of the effectiveness of its software design and hardware design.
- The development of this system is highly cost-effective. We present a second comparative study where we compare the cost of our system with the cost of prior works in these fields, which involved real-world development. This comparative study upholds the fact that the cost of our system is the least as compared to all these works, thereby upholding its cost-effective nature. For this comparative study, we used only the cost of equipment as the grounds for comparison. While there can be several other costs (such as the cost of installation, cost of maintenance, salary of research personnel, cost of deployment, computational costs, and so on) that can be computed, most of the prior works in this field reported only the cost of equipment, so only this parameter was used as the grounds for comparison in this comparative study. Furthermore, comparing the cost of the associated equipment to comment on the cost-effectiveness of the underlying system is an approach that has been followed by several researchers in the broad domain of IoT.
2. Literature Review
- The available AAL-based systems for fall detection cannot track the user’s indoor location, and vice versa. Furthermore, the hardware components (sensors) used to develop the fall detection systems cannot be programmed or customized to capture the necessary data required for incorporating the functionality of indoor localization in such systems, and vice versa. For instance, a host of beacons [23], WiFi access points [26], and WiFi fingerprint capturing architecture [27] help to capture the necessary data for indoor localization, but these hardware components cannot be programmed or customized to capture any relevant data that would be necessary for detecting falls. It is highly essential that, in addition to being able to track, analyze, and interpret human behavior, such systems are also able to detect the associated indoor location so that the same can be communicated to caregivers or emergency responders to facilitate timely care in the event of a fall or any similar health-related emergencies. Delay in care from a health-related emergency, such as a fall, can have both short-term and long-term health-related impacts.
- A majority of these systems were tested on datasets [24,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80]. The proposed software designs and/or software frameworks that were used by the authors of these respective works cannot be directly applied in the real-world to detect falls and indoor locations of users during ADLs as the underlining systems were not developed to work based on incoming or continuously generating human-behavior-based data in real-time.
- While there have been some works that have involved the real-world implementation of the underlining AAL systems, the cost of equipment necessary for the development of such systems is very high. For instance, the system proposed by Kohoutek et al. [36] costs USD 9000, the one by Muffert et al. [37] costs more than USD 10,000, the one by Tilsch et al. [38] costs about USD 1055, the one by Habbecke et al. costs about USD 1055, the one by Popescu et al. [40] costs USD 1500, the one by Huang et al. [56] costs USD 750, the one by Dasios et al. [57] costs USD 581, and so on. Such high costs are a major challenge to the real-world development and wide-scale deployment of such systems across multiple smart homes.
- These methodologies use multiple sensors and hardware systems that need to be installed in the living confines of the user. Some examples include 13 beacons [23], WiFi access points and WiFi fingerprint capturing architecture [26,27], RSSI data capturing methodologies [28,29], thermal vision sensors [43], and smart cameras [44] that need to be carried by the users. Installing such sensors across smart communities or smart cities that could represent multiple interconnected smart homes would be highly costly, and the elderly are usually receptive to the introduction of such a host of hardware components into their living environments [81].
- The design process for the development of most of these systems [23,26,27,28,29,33,34,35,36,37,38,39,40,41,42,47,48,49,50,51,52,53,54,55,56,57] is complicated as it involves the integration and communication of multiple software and hardware components. As there is a need for the development of AAL systems that can perform both fall detection and indoor localizations in a simultaneous manner in the real-world, integrating the hardware components of these underlining systems (integrating hardware components from systems aimed at fall detection with hardware components from systems aimed at indoor localization) and developing a software framework that can receive, communicate, share, and exchange data with all these hardware components in a seamless manner in real-time would be even more complicated.
- Some of the works have also involved the development of new applications, such as the smartphone-based application proposed in [30] and the wearable devices proposed in [46,49,50]. Replicating the design of an application has several challenges unless it is replicated or re-developed by the original developers [82]. In the context of wearables, it is crucial to ensure that the design methodology follows the ‘wearables for all’ design approach [83]. Both these factors pose a challenge to the mass development of such solutions.
3. Methodology and System Design
3.1. Methodology for Fall Detection during ADLs
3.2. Methodology for Indoor Localization during ADLs
- The complex activity analysis as per [89] involves detecting and analyzing the ADLs in terms of the atomic activities, context attributes, core atomic activities, core context attributes, start atomic activities, start context attributes, end atomic activities, and end context attributes using probabilistic reasoning principles and the associated weights of each of these components of a given ADL.
- Inferring the semantic relationships between the changing dynamics of these actions and the context-based parameters of these actions.
- Studying and analyzing the semantic relationships between the accelerometer data, gyroscope data, and the associated actions and the context-based parameters of these actions (obtained from the complex activity analysis) within each ‘activity-based zone’.
- Interpreting the semantic relationships between the accelerometer data, gyroscope data, and the associated actions and the context-based parameters of these actions across different ‘activity-based zones’ based on the sequence in which the different ADLs took place and the related temporal information.
- Integrating the findings from Step 4 and Step 5 to interpret the interrelated and semantic relationships between the accelerometer data and the gyroscope data with the location information associated with different ADLs that were successfully completed in all the ‘activity-based zones’ in the given indoor environment.
- Splitting the data into the training set and test set and developing a machine-learning-based model to detect the location of a user in terms of these spatial ‘zones’ based on the associated accelerometer data and gyroscope data.
- Computing the accuracy of the system using a confusion matrix.
3.3. Methodology for Indoor Localization and Fall Detection: Real-World Implementation
- (a)
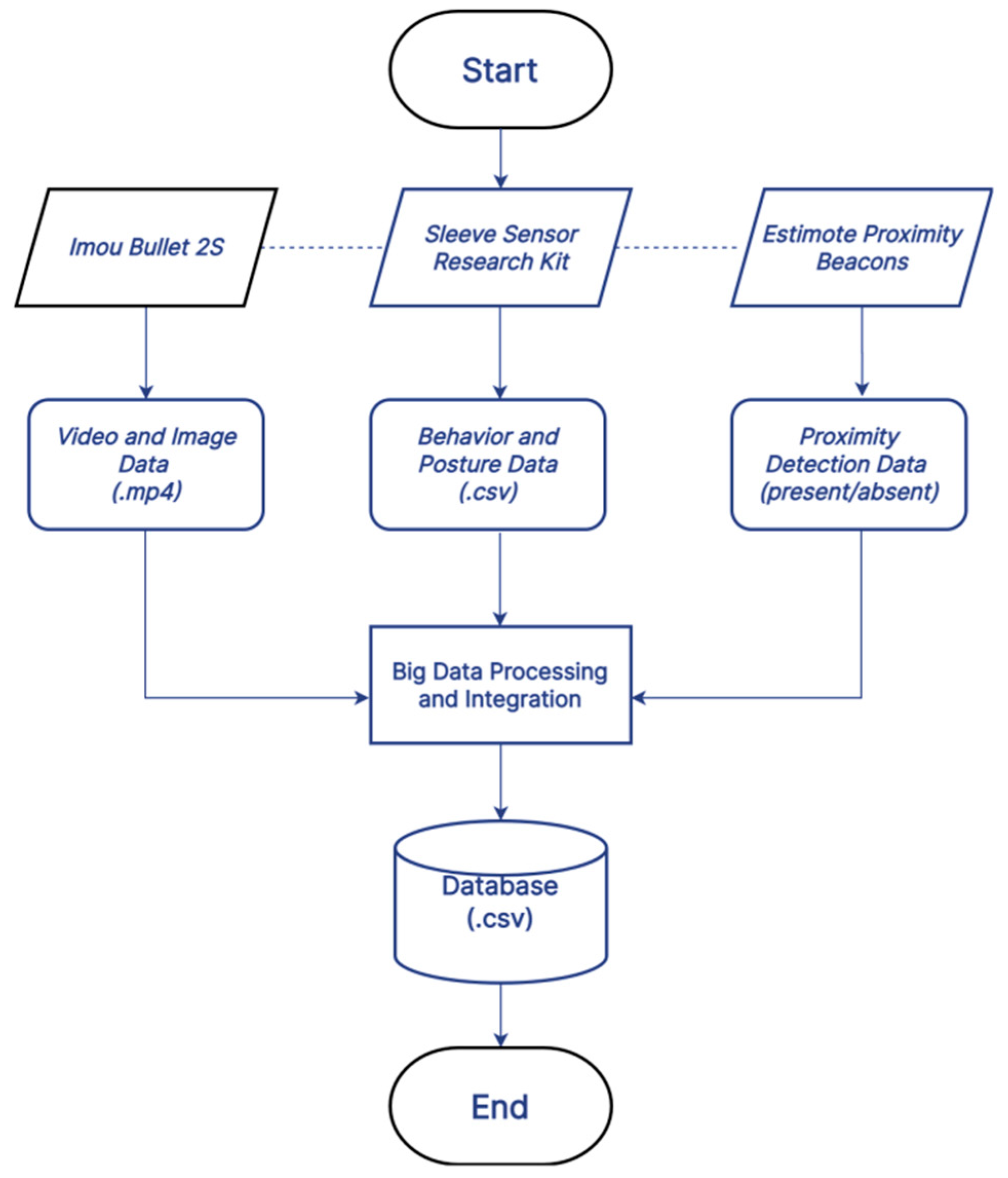
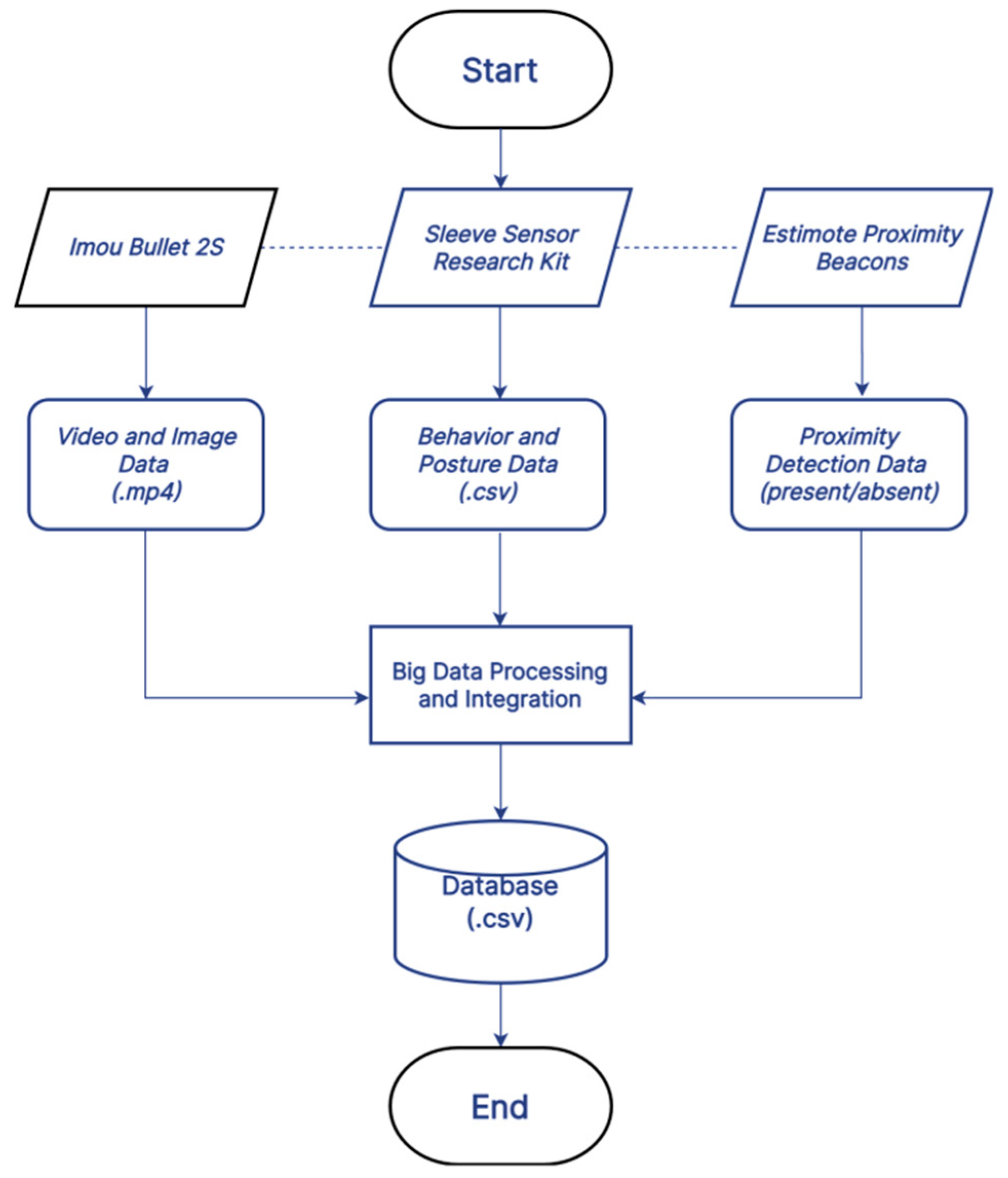
- The Imou Bullet 2S Smart Camera: The Imou Bullet 2S is a smart camera that can directly connect to WiFi and can be used to capture different components of video-based and image-based data during different ADLs. It has features such as infrared mode, color mode, smart mode, and human detection. The technical specifications of this smart camera include 1080P Full HD glass optics, 2.8 mm lens, 120° viewing angle, 98 ft night vision, IR lighting, inbuilt image-processing algorithm, storage facility via the H.265 compression system on an SD card (up to 256 GB) or on an encrypted cloud server, human motion detection, and an in-built microphone [90].
- (b)
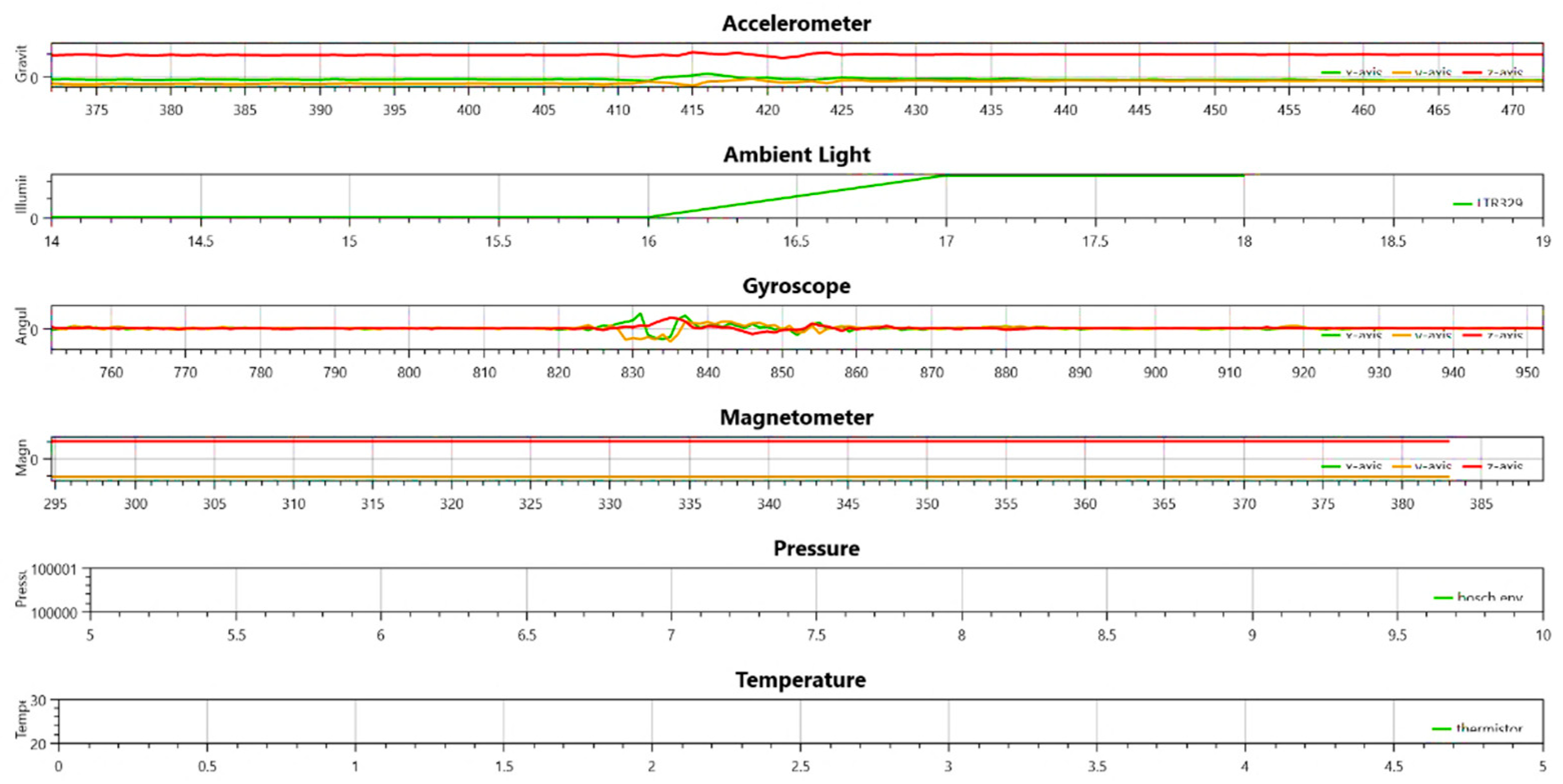
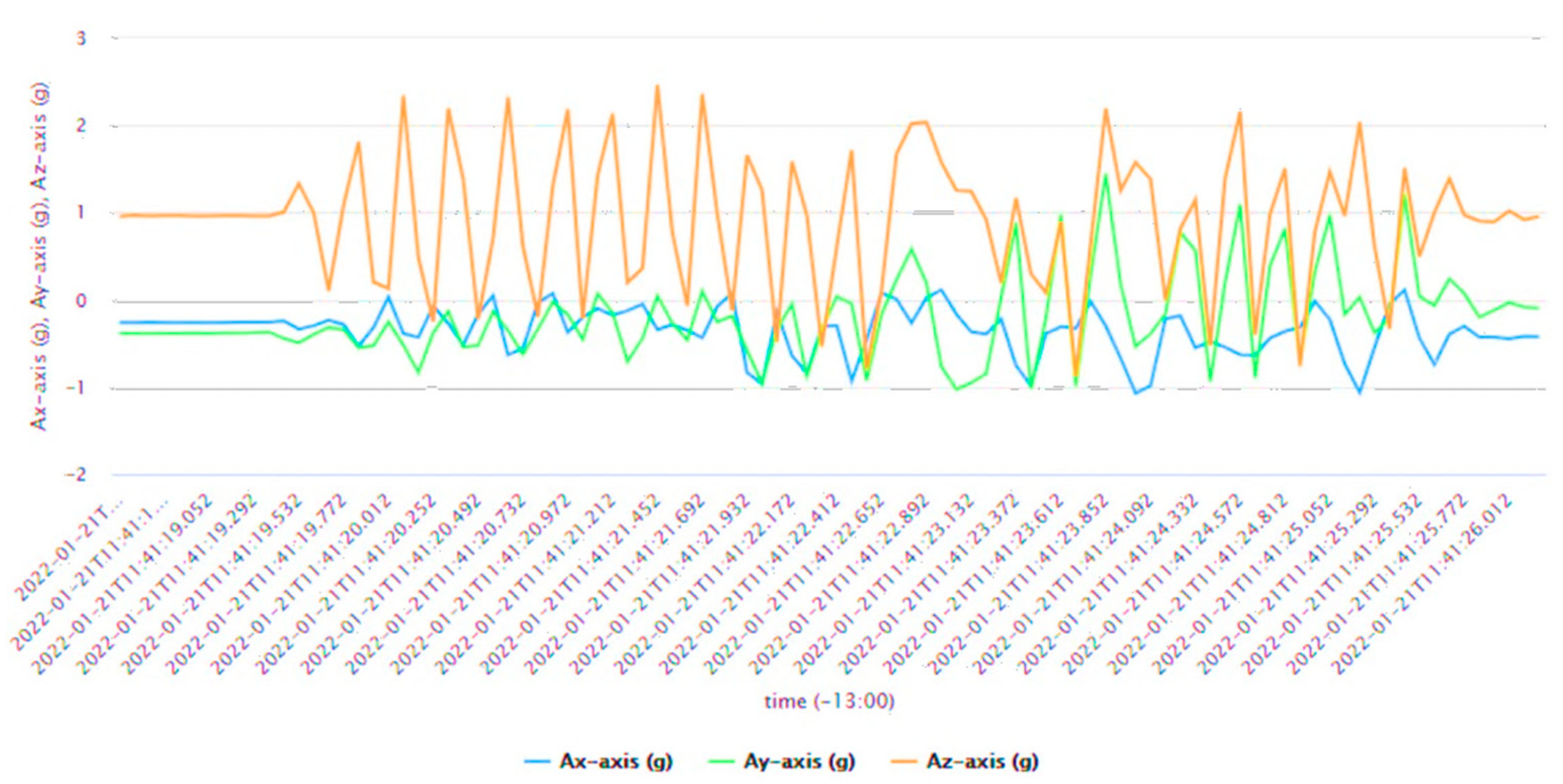
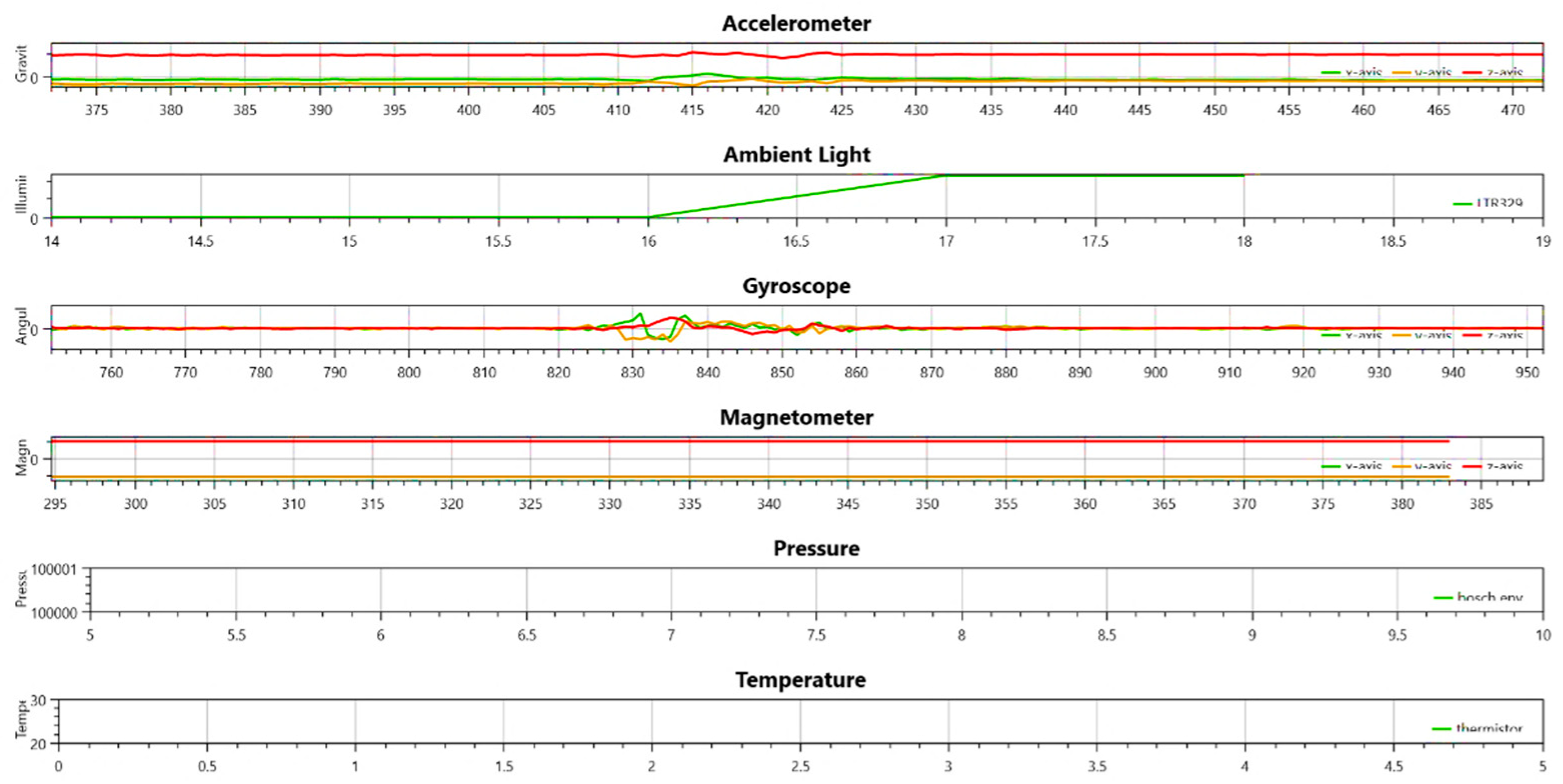
- The Sleeve Sensor Research Kit: The Sleeve Sensor Research Kit has several components to record the different characteristics of motion and behavior data during ADLs. These include an accelerometer, gyroscope, magnetometer, sensor fusion, pressure sensor, and temperature sensor. Specifically, this MMS sensing system consists of a wearable device with the following sensors: six-axis accelerometer + gyroscope, BMI270 temperature, BMP280 LTR-329ALS, BMP280 barometer/pressure/altimeter, ambient light/luminosity magnetometer, with three axes, BMM150 sensor fusion, nine-axis BOSCH 512MB memory, lithium-ion rechargeable battery, Bluetooth low energy, CPU, button, LED, and GPIOs [91].
- (c)
- The Estimote Proximity Beacons: The Estimote Proximity Beacons can be used to track the proximity of a user to different context parameters as well as to detect the presence or absence of the user in a specific ‘activity-based zone’ during different ADLs. Each beacon has a low-power ARM® CPU (32-bit or 64 MHz CPU); a quad-core, 64-bit, 1.2 GHz CPU in Mirror flash memory to store apps and data; 8 GB in Mirror RAM memory for the apps to use while running; 1 GB in Mirror; and a Bluetooth antenna and chip to communicate with other devices and between the beacons themselves [92].
- They are cost-effective.
- These sensors are easily available and can be seamlessly set up in any given indoor space or region without the need for researchers to complete any intensive trainings.
- The development of a software solution that can communicate and interface with all these sensors is not complicated.
- The design process, both for the experiments and for the system architecture, becomes convenient owing to the specifications, coverage area, and characteristics of these sensors.
4. Results and Discussions
4.1. Results and Findings from Real-World Implementation
4.2. Comparative Study to Uphold the Cost-Effectiveness of the System
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhavoronkov, A.; Bischof, E.; Lee, K.-F. Artificial Intelligence in Longevity Medicine. Nat. Aging 2021, 1, 5–7. [Google Scholar] [CrossRef]
- Decade of Healthy Ageing (2021–2030). Available online: https://www.who.int/initiatives/decade-of-healthy-ageing (accessed on 9 May 2022).
- Ageing and Health. Available online: https://www.who.int/news-room/fact-sheets/detail/ageing-and-health (accessed on 9 May 2022).
- Remillard, E.T.; Campbell, M.L.; Koon, L.M.; Rogers, W.A. Transportation Challenges for Persons Aging with Mobility Disability: Qualitative Insights and Policy Implications. Disabil. Health J. 2022, 15, 101209. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.H.; Lam, C.H.Y.; Xhafa, F.; Tang, V.; Ip, W.H. The Vision of the Healthcare Industry for Supporting the Aging Population. In Lecture Notes on Data Engineering and Communications Technologies; Springer International Publishing: Cham, Switzerland, 2022; pp. 5–15. ISBN 9783030933869. [Google Scholar]
- Yang, W.; Wu, B.; Tan, S.Y.; Li, B.; Lou, V.W.Q.; Chen, Z.A.; Chen, X.; Fletcher, J.R.; Carrino, L.; Hu, B.; et al. Understanding Health and Social Challenges for Aging and Long-Term Care in China. Res. Aging 2021, 43, 127–135. [Google Scholar] [CrossRef] [PubMed]
- Javed, A.R.; Fahad, L.G.; Farhan, A.A.; Abbas, S.; Srivastava, G.; Parizi, R.M.; Khan, M.S. Automated Cognitive Health Assessment in Smart Homes Using Machine Learning. Sustain. Cities Soc. 2021, 65, 102572. [Google Scholar] [CrossRef]
- Zielonka, A.; Wozniak, M.; Garg, S.; Kaddoum, G.; Piran, M.J.; Muhammad, G. Smart Homes: How Much Will They Support Us? A Research on Recent Trends and Advances. IEEE Access 2021, 9, 26388–26419. [Google Scholar] [CrossRef]
- Cicirelli, G.; Marani, R.; Petitti, A.; Milella, A.; D’Orazio, T. Ambient Assisted Living: A Review of Technologies, Methodologies and Future Perspectives for Healthy Aging of Population. Sensors 2021, 21, 3549. [Google Scholar] [CrossRef]
- Pappadà, A.; Chattat, R.; Chirico, I.; Valente, M.; Ottoboni, G. Assistive Technologies in Dementia Care: An Updated Analysis of the Literature. Front. Psychol. 2021, 12, 644587. [Google Scholar] [CrossRef]
- Appeadu, M.K.; Bordoni, B. Falls and Fall Prevention in the Elderly. In StatPearls [Internet]; StatPearls Publishing: Treasure Island, FL, USA, 2022. [Google Scholar]
- Nahian, M.J.A.; Ghosh, T.; Banna, M.H.A.; Aseeri, M.A.; Uddin, M.N.; Ahmed, M.R.; Mahmud, M.; Kaiser, M.S. Towards an Accelerometer-Based Elderly Fall Detection System Using Cross-Disciplinary Time Series Features. IEEE Access 2021, 9, 39413–39431. [Google Scholar] [CrossRef]
- Wang, X.; Ellul, J.; Azzopardi, G. Elderly Fall Detection Systems: A Literature Survey. Front. Robot. AI 2020, 7, 71. [Google Scholar] [CrossRef]
- Lezzar, F.; Benmerzoug, D.; Kitouni, I. Camera-Based Fall Detection System for the Elderly with Occlusion Recognition. Appl. Med. Inform. 2020, 42, 169–179. [Google Scholar]
- CDC. Keep on Your Feet—Preventing Older Adult Falls. Available online: https://www.cdc.gov/injury/features/older-adult-falls/index.html (accessed on 9 May 2022).
- The National Council on Aging. Available online: https://www.ncoa.org/news/resources-for-reporters/get-the-facts/falls-prevention-facts/ (accessed on 9 May 2022).
- Facts about Falls. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/adultfalls.html (accessed on 9 May 2022).
- Older Adult Falls Reported by State. Available online: https://www.cdc.gov/homeandrecreationalsafety/falls/data/fallcost.html (accessed on 9 May 2022).
- Mubashir, M.; Shao, L.; Seed, L. A Survey on Fall Detection: Principles and Approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Langlois, C.; Tiku, S.; Pasricha, S. Indoor Localization with Smartphones: Harnessing the Sensor Suite in Your Pocket. IEEE Consum. Electron. Mag. 2017, 6, 70–80. [Google Scholar] [CrossRef]
- Zafari, F.; Papapanagiotou, I.; Devetsikiotis, M.; Hacker, T. An IBeacon Based Proximity and Indoor Localization System. arXiv 2017, arXiv:1703.07876. [Google Scholar] [CrossRef]
- Dardari, D.; Closas, P.; Djuric, P.M. Indoor Tracking: Theory, Methods, and Technologies. IEEE Trans. Veh. Technol. 2015, 64, 1263–1278. [Google Scholar] [CrossRef] [Green Version]
- Varma, P.S.; Anand, V. Random Forest Learning Based Indoor Localization as an IoT Service for Smart Buildings. Wirel. Pers. Commun. 2021, 117, 3209–3227. [Google Scholar] [CrossRef]
- Qin, F.; Zuo, T.; Wang, X. CCpos: WiFi Fingerprint Indoor Positioning System Based on CDAE-CNN. Sensors 2021, 21, 1114. [Google Scholar] [CrossRef]
- Musa, A.; Nugraha, G.D.; Han, H.; Choi, D.; Seo, S.; Kim, J. A Decision Tree-Based NLOS Detection Method for the UWB Indoor Location Tracking Accuracy Improvement: Decision-Tree NLOS Detection for the UWB Indoor Location Tracking. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar] [CrossRef]
- Yim, J. Introducing a Decision Tree-Based Indoor Positioning Technique. Expert Syst. Appl. 2008, 34, 1296–1302. [Google Scholar] [CrossRef]
- Hu, J.; Liu, D.; Yan, Z.; Liu, H. Experimental Analysis on Weight K-Nearest Neighbor Indoor Fingerprint Positioning. IEEE Internet Things J. 2019, 6, 891–897. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid Deep Learning Model Based Indoor Positioning Using WI-Fi RSSI Heat Maps for Autonomous Applications. Electronics 2020, 10, 2. [Google Scholar] [CrossRef]
- Barsocchi, P.; Lenzi, S.; Chessa, S.; Furfari, F. Automatic Virtual Calibration of Range-Based Indoor Localization Systems. Wirel. Commun. Mob. Comput. 2012, 12, 1546–1557. [Google Scholar] [CrossRef] [Green Version]
- Kothari, N.; Kannan, B.; Glasgwow, E.D.; Dias, M.B. Robust Indoor Localization on a Commercial Smart Phone. Procedia Comput. Sci. 2012, 10, 1114–1120. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones Based Crowdsourcing for Indoor Localization. IEEE Trans. Mob. Comput. 2015, 14, 444–457. [Google Scholar] [CrossRef]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Dombroski, C.E.; Balsdon, M.E.R.; Froats, A. The Use of a Low Cost 3D Scanning and Printing Tool in the Manufacture of Custom-Made Foot Orthoses: A Preliminary Study. BMC Res. Notes 2014, 7, 443. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ichikari, R.; Kaji, K.; Shimomura, R.; Kourogi, M.; Okuma, T.; Kurata, T. Off-Site Indoor Localization Competitions Based on Measured Data in a Warehouse. Sensors 2019, 19, 763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lemic, F.; Handziski, V.; Wolisz, A. D4.3b Report on the Cooperation with EvAAL and Microsoft/IPSN Initiatives. Available online: https://www2.tkn.tu-berlin.de/tkn-projects/evarilos/deliverables/D4.3b.pdf (accessed on 28 June 2022).
- Kohoutek, T.K.; Mautz, R.; Donaubauer, A. Real-Time Indoor Positioning Using Range Imaging Sensors. In Proceedings of the Real-Time Image and Video Processing 2010; Kehtarnavaz, N., Carlsohn, M.F., Eds.; SPIE: Bellingham, DC, USA, 2010; Volume 7724, p. 77240K. [Google Scholar]
- Muffert, M.; Siegemund, J.; Förstner, W. The Estimation of Spatial Positions by Using an Omnidirectional Camera System. In Proceedings of the 2nd International Conference on Machine Control & Guidance, Bonn, Germany, 9–11 March 2010; pp. 96–104. [Google Scholar]
- Tilch, S.; Mautz, R. Development of a New Laser-Based, Optical Indoor Positioning System. In International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences; Part 5 Commission V Symposium; ISPRS: Newcastle upon Tyne, UK, 2010; Volume XXXVIII. [Google Scholar]
- Habbecke, M.; Kobbelt, L. Laser Brush: A Flexible Device for 3D Reconstruction of Indoor Scenes. In Proceedings of the 2008 ACM Symposium on Solid and Physical Modeling—SPM ’08, New York, NY, USA, 2–4 June 2008; ACM Press: New York, NY, USA, 2008. [Google Scholar]
- Popescu, V.; Sacks, E.; Bahmutov, G. Interactive Modeling from Dense Color and Sparse Depth. In Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization and Transmission, Thessaloniki, Greece, 9 September 2004; 3DPVT 2004. pp. 430–437. [Google Scholar]
- Liu, W.; Hu, C.; He, Q.; Meng, M.Q.-H.; Liu, L. An Hybrid Localization System Based on Optics and Magnetics. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1165–1169. [Google Scholar]
- Braun, A.; Dutz, T. Low-Cost Indoor Localization Using Cameras—Evaluating AmbiTrack and Its Applications in Ambient Assisted Living. J. Ambient. Intell. Smart Environ. 2016, 8, 243–258. [Google Scholar] [CrossRef]
- Rafferty, J.; Synnott, J.; Nugent, C.; Morrison, G.; Tamburini, E. Fall Detection through Thermal Vision Sensing. In Ubiquitous Computing and Ambient Intelligence; Springer International Publishing: Cham, Switzerland, 2016; pp. 84–90. ISBN 9783319487984. [Google Scholar]
- Ozcan, K.; Velipasalar, S.; Varshney, P.K. Autonomous Fall Detection with Wearable Cameras by Using Relative Entropy Distance Measure. IEEE Trans. Hum. Mach. Syst. 2016, 47, 31–39. [Google Scholar] [CrossRef]
- Khan, S.; Qamar, R.; Zaheen, R.; Al-Ali, A.R.; Al Nabulsi, A.; Al-Nashash, H. Internet of Things Based Multi-Sensor Patient Fall Detection System. Healthc. Technol. Lett. 2019, 6, 132–137. [Google Scholar] [CrossRef] [PubMed]
- Cahoolessur, D.K.; Rajkumarsingh, B. Fall Detection System Using XGBoost and IoT. RD J. 2020, 36. [Google Scholar] [CrossRef]
- Godfrey, A.; Bourke, A.; Del Din, S.; Morris, R.; Hickey, A.; Helbostad, J.L.; Rochester, L. Towards Holistic Free-Living Assessment in Parkinson’s Disease: Unification of Gait and Fall Algorithms with a Single Accelerometer. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2016, 2016, 651–654. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Popescu, M.; Skubic, M.; Rantz, M. An Automatic Fall Detection Framework Using Data Fusion of Doppler Radar and Motion Sensor Network. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2014, 2014, 5940–5943. [Google Scholar] [CrossRef] [PubMed]
- Dinh, A.; Shi, Y.; Teng, D.; Ralhan, A.; Chen, L.; Dal Bello-Haas, V.; Basran, J.; Ko, S.-B.; McCrowsky, C. A Fall and Near-Fall Assessment and Evaluation System. Open Biomed. Eng. J. 2009, 3, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Dinh, A.; Teng, D.; Chen, L.; Ko, S.B.; Shi, Y.; Basran, J.; Del Bello-Hass, V. Data Acquisition System Using Six Degree-of-Freedom Inertia Sensor and ZigBee Wireless Link for Fall Detection and Prevention. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2008, 2008, 2353–2356. [Google Scholar] [CrossRef] [PubMed]
- Townsend, D.I.; Goubran, R.; Frize, M.; Knoefel, F. Preliminary Results on the Effect of Sensor Position on Unobtrusive Rollover Detection for Sleep Monitoring in Smart Homes. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2009, 2009, 6135–6138. [Google Scholar] [CrossRef] [PubMed]
- Cordes, A.; Pollig, D.; Leonhardt, S. Comparison of Different Coil Positions for Ventilation Monitoring with Contact-Less Magnetic Impedance Measurements. J. Phys. Conf. Ser. 2010, 224, 012144. [Google Scholar] [CrossRef] [Green Version]
- Hsu, Y.-W.; Perng, J.-W.; Liu, H.-L. Development of a Vision Based Pedestrian Fall Detection System with Back Propagation Neural Network. In Proceedings of the 2015 IEEE/SICE International Symposium on System Integration (SII), Nagoya, Japan, 11–13 December 2015; pp. 433–437. [Google Scholar]
- Yun, Y.; Gu, I.Y.-H. Human Fall Detection in Videos via Boosting and Fusing Statistical Features of Appearance, Shape and Motion Dynamics on Riemannian Manifolds with Applications to Assisted Living. Comput. Vis. Image Underst. 2016, 148, 111–122. [Google Scholar] [CrossRef]
- Nguyen, H.T.K.; Fahama, H.; Belleudy, C.; Van Pham, T. Low Power Architecture Exploration for Standalone Fall Detection System Based on Computer Vision. In Proceedings of the 2014 European Modelling Symposium, Pisa, Italy, 21–23 October 2014; pp. 169–173. [Google Scholar]
- Huang, Y.; Newman, K. Improve Quality of Care with Remote Activity and Fall Detection Using Ultrasonic Sensors. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2012, 2012, 5854–5857. [Google Scholar] [CrossRef]
- Dasios, A.; Gavalas, D.; Pantziou, G.; Konstantopoulos, C. Hands-on Experiences in Deploying Cost-Effective Ambient-Assisted Living Systems. Sensors 2015, 15, 14487–14512. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Fan, X.; He, X.; Xiang, C.; Ye, Q.; Huang, X.; Fang, G.; Chen, L.L.; Qin, J.; Wang, Z. CNNLoc: Deep-Learning Based Indoor Localization with WiFi Fingerprinting. In Proceedings of the 2019 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Leicester, UK, 19–23 August 2019; pp. 589–595. [Google Scholar]
- Kim, K.S.; Lee, S.; Huang, K. A Scalable Deep Neural Network Architecture for Multi-Building and Multi-Floor Indoor Localization Based on WiFi Fingerprinting. Big Data Anal. 2018, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Jang, J.-W.; Hong, S.-N. Indoor Localization with WiFi Fingerprinting Using Convolutional Neural Network. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; 2018; pp. 753–758. [Google Scholar]
- Wang, L.; Tiku, S.; Pasricha, S. CHISEL: Compression-Aware High-Accuracy Embedded Indoor Localization with Deep Learning. IEEE Embed. Syst. Lett. 2022, 14, 23–26. [Google Scholar] [CrossRef]
- Wei, Y.; Akinci, B. A Vision and Learning-Based Indoor Localization and Semantic Mapping Framework for Facility Operations and Management. Autom. Constr. 2019, 107, 102915. [Google Scholar] [CrossRef]
- Wietrzykowski, J.; Nowicki, M.; Skrzypczyński, P. Adopting the FAB-MAP Algorithm for Indoor Localization with WiFi Fingerprints. In Automation 2017; Springer International Publishing: Cham, Switzerland, 2017; pp. 585–594. ISBN 9783319540412. [Google Scholar]
- Panja, A.K.; Karim, S.F.; Neogy, S.; Chowdhury, C. A Novel Feature Based Ensemble Learning Model for Indoor Localization of Smartphone Users. Eng. Appl. Artif. Intell. 2022, 107, 104538. [Google Scholar] [CrossRef]
- Yin, L.; Ma, P.; Deng, Z. JLGBMLoc-A Novel High-Precision Indoor Localization Method Based on LightGBM. Sensors 2021, 21, 2722. [Google Scholar] [CrossRef]
- Patil, M.; Wang, X.; Wang, X.; Mao, S. Adversarial Attacks on Deep Learning-Based Floor Classification and Indoor Localization. In Proceedings of the 3rd ACM Workshop on Wireless Security and Machine Learning, New York, NY, USA, 28 June–2 July 2021; ACM: New York, NY, USA, 2021. [Google Scholar]
- Gan, H.; Khir, M.H.B.M.; Witjaksono Bin Djaswadi, G.; Ramli, N. A Hybrid Model Based on Constraint OSELM, Adaptive Weighted SRC and KNN for Large-Scale Indoor Localization. IEEE Access 2019, 7, 6971–6989. [Google Scholar] [CrossRef]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Seçkin, A.Ç.; Coşkun, A. Hierarchical Fusion of Machine Learning Algorithms in Indoor Positioning and Localization. Appl. Sci. 2019, 9, 3665. [Google Scholar] [CrossRef] [Green Version]
- Galvão, Y.M.; Ferreira, J.; Albuquerque, V.A.; Barros, P.; Fernandes, B.J.T. A Multimodal Approach Using Deep Learning for Fall Detection. Expert Syst. Appl. 2021, 168, 114226. [Google Scholar] [CrossRef]
- Sase, P.S.; Bhandari, S.H. Human Fall Detection Using Depth Videos. In Proceedings of the 2018 5th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 22–23 February 2018; pp. 546–549. [Google Scholar]
- Li, H.; Li, C.; Ding, Y. Fall Detection Based on Fused Saliency Maps. Multimed. Tools Appl. 2021, 80, 1883–1900. [Google Scholar] [CrossRef]
- Theodoridis, T.; Solachidis, V.; Vretos, N.; Daras, P. Human Fall Detection from Acceleration Measurements Using a Recurrent Neural Network. In Precision Medicine Powered by pHealth and Connected Health; Springer: Singapore, 2018; pp. 145–149. ISBN 9789811074189. [Google Scholar]
- Abobakr, A.; Hossny, M.; Abdelkader, H.; Nahavandi, S. RGB-D Fall Detection via Deep Residual Convolutional LSTM Networks. In Proceedings of the 2018 Digital Image Computing: Techniques and Applications (DICTA), Canberra, Australia, 10–13 December 2018; pp. 1–7. [Google Scholar]
- Abdo, H.; Amin, K.M.; Hamad, A.M. Fall Detection Based on RetinaNet and MobileNet Convolutional Neural Networks. In Proceedings of the 2020 15th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 15–16 December 2020; pp. 1–7. [Google Scholar]
- Sowmyayani, S.; Murugan, V.; Kavitha, J. Fall Detection in Elderly Care System Based on Group of Pictures. Vietnam J. Comput. Sci. 2021, 8, 199–214. [Google Scholar] [CrossRef]
- Kalita, S.; Karmakar, A.; Hazarika, S.M. Human Fall Detection during Activities of Daily Living Using Extended CORE9. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–6. [Google Scholar]
- Soni, P.K.; Choudhary, A. Automated Fall Detection from a Camera Using Support Vector Machine. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–6. [Google Scholar]
- Serpa, Y.R.; Nogueira, M.B.; Neto, P.P.M.; Rodrigues, M.A.F. Evaluating Pose Estimation as a Solution to the Fall Detection Problem. In Proceedings of the 2020 IEEE 8th International Conference on Serious Games and Applications for Health (SeGAH), Vancouver, BC, Canada, 12–14 August 2020; pp. 1–7. [Google Scholar]
- Lin, C.-B.; Dong, Z.; Kuan, W.-K.; Huang, Y.-F. A Framework for Fall Detection Based on OpenPose Skeleton and LSTM/GRU Models. Appl. Sci. 2020, 11, 329. [Google Scholar] [CrossRef]
- Arthanat, S.; Wilcox, J.; Macuch, M. Profiles and Predictors of Smart Home Technology Adoption by Older Adults. OTJR 2019, 39, 247–256. [Google Scholar] [CrossRef] [PubMed]
- Gray, J.; Helland, P.; O’Neil, P.; Shasha, D. The Dangers of Replication and a Solution. In Proceedings of the 1996 ACM SIGMOD International Conference on Management of Data—SIGMOD ’96, Montreal, QC, Canada, 4–6 June 1996; ACM Press: New York, NY, USA, 1996. [Google Scholar]
- Wentzel, J.; Velleman, E.; van der Geest, T. Wearables for All: Development of Guidelines to Stimulate Accessible Wearable Technology Design. In Proceedings of the 13th International Web for All Conference, Montreal, QC, Canada, 11–13 April 2016; ACM: New York, NY, USA, 2016. [Google Scholar]
- Thakur, N.; Han, C.Y. A Study of Fall Detection in Assisted Living: Identifying and Improving the Optimal Machine Learning Method. J. Sens. Actuator Netw. 2021, 10, 39. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. Multimodal Approaches for Indoor Localization for Ambient Assisted Living in Smart Homes. Information 2021, 12, 114. [Google Scholar] [CrossRef]
- Shaeffer, D.K. MEMS Inertial Sensors: A Tutorial Overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Kaluža, B.; Mirchevska, V.; Dovgan, E.; Luštrek, M.; Gams, M. An Agent-Based Approach to Care in Independent Living. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 177–186. ISBN 9783642169168. [Google Scholar]
- Tabbakha, N.E. A Dataset for Elderly Action Recognition Using Indoor Location and Activity Tracking Data 2020. Available online: https://data.mendeley.com/datasets/sy3kcttdtx/3 (accessed on 21 May 2022).
- Saguna, S.; Zaslavsky, A.; Chakraborty, D. Complex Activity Recognition Using Context-Driven Activity Theory and Activity Signatures. ACM Trans. Comput. Hum. Interact. 2013, 20, 1–34. [Google Scholar] [CrossRef]
- The Imou Bullet 2S Smart Camera. Available online: http://://www.imoulife.com/product/detail/Bullet2S (accessed on 9 May 2022).
- Velcro Sleeve Kit for MMC and MMR. Available online: https://mbientlab.com/store/sleeve-sensor-research-kit (accessed on 9 May 2022).
- Estimote SpaceTimeOS. Available online: https://estimote.com/ (accessed on 9 May 2022).
- Microsoft SQL Server Versions List. Available online: https://sqlserverbuilds.blogspot.com/ (accessed on 9 May 2022).
- Available online: https://researchhow2.uc.edu/docs/default-source/default-document-library/citi-affiliation-guide.pdf (accessed on 9 May 2022).
- University of Cincinnati-IT@UC Institutional Review Board. Available online: https://research.uc.edu/support/offices/hrpp/irb (accessed on 9 May 2022).
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer Placement for Posture Recognition and Fall Detection. In Proceedings of the 2011 Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 47–54. [Google Scholar]
- Brown, B.; Reeves, S.; Sherwood, S. Into the Wild: Challenges and Opportunities for Field Trial Methods. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011. [Google Scholar]
- Velavan, T.P.; Meyer, C.G. The COVID-19 Epidemic. Trop. Med. Int. Health 2020, 25, 278–280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, L.B.; Kennedy, L. President Trump Declares State of Emergency for COVID-19. Available online: https://www.ncsl.org/ncsl-in-dc/publications-and-resources/president-trump-declares-state-of-emergency-for-covid-19.aspx (accessed on 9 May 2022).
- Worldometer. COVID Live—Coronavirus Statistics. Available online: https://www.worldometers.info/coronavirus/ (accessed on 9 May 2022).
- CDC COVID-19 Transmission. Available online: https://www.cdc.gov/coronavirus/2019-ncov/transmission/index.html (accessed on 13 July 2022).
- University of Cincinnati-IT@UC Coronavirus Impacts Return to On-Campus Research. Available online: https://research.uc.edu/coronavirus-impacts-return-to-on-campus-research (accessed on 10 May 2022).
- Mierswa, I.; Wurst, M.; Klinkenberg, R.; Scholz, M.; Euler, T. YALE: Rapid Prototyping for Complex Data Mining Tasks. In Proceedings of the 12th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining—KDD ’06, Philadelphia, PA, USA, 20–23 August 2006; ACM Press: New York, NY, USA, 2006. [Google Scholar]
- Sen, S.; Chakraborty, D.; Subbaraju, V.; Banerjee, D.; Misra, A.; Banerjee, N.; Mittal, S. Accommodating User Diversity for In-Store Shopping Behavior Recognition. In Proceedings of the 2014 ACM International Symposium on Wearable Computers—ISWC ’14, Seattle, WC, USA, 13–17 September 2014; ACM Press: New York, NY, USA, 2014. [Google Scholar]
- Coskun, A.; Erbug, C. User Diversity in Design for Behavior Change. In Proceedings of the DRS Biennial Conference Series, Umeå, Sweden, 16–19 June 2014. [Google Scholar]
- Paul, A.; Ahmad, A.; Rathore, M.M.; Jabbar, S. Smartbuddy: Defining Human Behaviors Using Big Data Analytics in Social Internet of Things. IEEE Wirel. Commun. 2016, 23, 68–74. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. Towards a Knowledge Base for Activity Recognition of Diverse Users. In Human Interaction, Emerging Technologies and Future Applications III; Springer International Publishing: Cham, Switzerland, 2021; pp. 303–308. ISBN 9783030553067. [Google Scholar]
- Rony, J.H.; Karim, N.; Rouf, M.D.A.; Islam, M.M.; Uddin, J.; Begum, M. A Cost-Effective IoT Model for a Smart Sewerage Management System Using Sensors. J 2021, 4, 356–366. [Google Scholar] [CrossRef]
- Vikram, N.; Harish, K.S.; Nihaal, M.S.; Umesh, R.; Kumar, S.A.A. A Low Cost Home Automation System Using WI-Fi Based Wireless Sensor Network Incorporating Internet of Things (IoT). In Proceedings of the 2017 IEEE 7th International Advance Computing Conference (IACC), Hyderabad, India, 5–7 January 2017; pp. 174–178. [Google Scholar]
- Sengupta, A.; Debnath, B.; Das, A.; De, D. FarmFox: A Quad-Sensor-Based IoT Box for Precision Agriculture. IEEE Consum. Electron. Mag. 2021, 10, 63–68. [Google Scholar] [CrossRef]
- Ogu, R.E.; Chukwudebe, G.A. Development of a Cost-Effective Electricity Theft Detection and Prevention System Based on IoT Technology. In Proceedings of the 2017 IEEE 3rd International Conference on Electro-Technology for National Development (NIGERCON), Owerri, Nigeria, 7–10 November 2017; pp. 756–760. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Cost Per Unit (in USD) | Total Cost (in USD) |
|---|---|---|
| Imou Smart Camera | 29.99 | 59.98 |
| Mbient Labs Sleeve Sensor | 103.99 | 103.99 |
| Proximity Sensors | 24.75 | 99.00 |
| Microsoft SQL Server 11.0 | 0.00 | 0.00 |
| The total cost of all the sensors | 262.97 | |
| Work | Number of Human Subjects |
|---|---|
| Godfrey et al. [47] | 1 |
| Liu et al. [48] | 1 |
| Dinh et al. [49] | 1 |
| Dinh et al. [50] | 1 |
| Townsend et al. [51] | 1 |
| Cordes et al. [52] | 1 |
| Dombroski et al. [33] | 1 |
| Ichikari et al. [34] (VDR Track) | 1 |
| Lemic et al. [35] | 1 |
| Thakur et al. [this work] | 1 |
| Focus Area of Work | Author Names | Fall Detection | Indoor Localization | ||
|---|---|---|---|---|---|
| Effective Software Design | Effective Hardware Design | Effective Software Design | Effective Hardware Design | ||
| Indoor Localization | Varma et al. [23] | ✓ | ✓ | ||
| Indoor Localization | Qin et al. [24] | ✓ | |||
| Indoor Localization | Musa et al. [25] | ✓ | ✓ | ||
| Indoor Localization | Yim et al. [26] | ✓ | ✓ | ||
| Indoor Localization | Hu et al. [27] | ✓ | ✓ | ||
| Indoor Localization | Poulose et al. [28] | ✓ | ✓ | ||
| Indoor Localization | Barsocchi et al. [29] | ✓ | ✓ | ||
| Indoor Localization | Kothari et al. [30] | ✓ | ✓ | ||
| Indoor Localization | Wu et al. [31] | ✓ | ✓ | ||
| Indoor Localization | Gu et al. [32] | ✓ | ✓ | ||
| Fall Detection | Rafferty et al. [43] | ✓ | ✓ | ||
| Fall Detection | Ozcan et al. [44] | ✓ | ✓ | ||
| Fall Detection | Khan et al. [45] | ✓ | ✓ | ||
| Fall Detection | Cahoolessur et al. [46] | ✓ | ✓ | ||
| Fall Detection | Godfrey et al. [47] | ✓ | ✓ | ||
| Fall Detection | Liu et al. [48] | ✓ | ✓ | ||
| Fall Detection | Dinh et al. [49,50] | ✓ | ✓ | ||
| Fall Detection | Townsend et al. [51] | ✓ | ✓ | ||
| Fall Detection | Hsu et al. [53] | ✓ | ✓ | ||
| Fall Detection | Yun et al. [54] | ✓ | ✓ | ||
| Fall Detection | Nguyen et al. [55] | ✓ | ✓ | ||
| Fall Detection | Huang et al. [56] | ✓ | ✓ | ||
| Indoor Localization | Song et al. [58] | ✓ | |||
| Indoor Localization | Kim et al. [59] | ✓ | |||
| Indoor Localization | Jang et al. [60] | ✓ | |||
| Indoor Localization | Wang et al. [61] | ✓ | |||
| Indoor Localization | Wei et al. [62] | ✓ | |||
| Indoor Localization | Wietrzykowski et al. [63] | ✓ | |||
| Indoor Localization | Panja et al. [64] | ✓ | |||
| Indoor Localization | Yin et al. [65] | ✓ | |||
| Indoor Localization | Patil et al. [66] | ✓ | |||
| Indoor Localization | Gan et al. [67] | ✓ | |||
| Indoor Localization | Hoang et al. [68] | ✓ | |||
| Indoor Localization | Seçkin et al. [69] | ✓ | |||
| Fall Detection | Galvão et al. [70] | ✓ | |||
| Fall Detection | Sase et al. [71], | ✓ | |||
| Fall Detection | Li et al. [72], | ✓ | |||
| Fall Detection | Theodoridis et al. [73], | ✓ | |||
| Fall Detection | Abobakr et al. [74], | ✓ | |||
| Fall Detection | Abdo et al. [75], | ✓ | |||
| Fall Detection | Sowmyayani et al. [76], | ✓ | |||
| Fall Detection | Kalita et al. [77], | ✓ | |||
| Fall Detection | Soni et al. [78], | ✓ | |||
| Fall Detection | Serpa et al. [79], | ✓ | |||
| Fall Detection | Lin et al. [80] | ✓ | |||
| Fall Detection | Thakur et al. [84] | ✓ | |||
| Indoor Localization | Thakur et al. [85] | ✓ | |||
| Indoor Localization and Fall Detection | Thakur et al. [this work] | ✓ | ✓ | ✓ | ✓ |
| Work | Costs (in USD) |
|---|---|
| Muffert al. [37] | >10,000 |
| Kohoutek et al. [36] | 9000 |
| Popescu et al. [40] | 1500.00 |
| Yun et al. [54] | 1372.49 * |
| Tilch et al. [38] | 1055.98 * |
| Habbecke et al. [39] | 1055.98 * |
| Hsu et al. [53] | 950.21 * |
| Liu et al. [41] | 844.61 * |
| Huang et al. [56] | 750.00 |
| Dasios et al. [57] | 581.00 |
| Braun et al. [42] | 460.00 |
| Nguyen et al. [55] | 422.36 * |
| Thakur et al. [this work] | 262.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thakur, N.; Han, C.Y. A Simplistic and Cost-Effective Design for Real-World Development of an Ambient Assisted Living System for Fall Detection and Indoor Localization: Proof-of-Concept. Information 2022, 13, 363. https://doi.org/10.3390/info13080363
Thakur N, Han CY. A Simplistic and Cost-Effective Design for Real-World Development of an Ambient Assisted Living System for Fall Detection and Indoor Localization: Proof-of-Concept. Information. 2022; 13(8):363. https://doi.org/10.3390/info13080363
Chicago/Turabian StyleThakur, Nirmalya, and Chia Y. Han. 2022. "A Simplistic and Cost-Effective Design for Real-World Development of an Ambient Assisted Living System for Fall Detection and Indoor Localization: Proof-of-Concept" Information 13, no. 8: 363. https://doi.org/10.3390/info13080363
APA StyleThakur, N., & Han, C. Y. (2022). A Simplistic and Cost-Effective Design for Real-World Development of an Ambient Assisted Living System for Fall Detection and Indoor Localization: Proof-of-Concept. Information, 13(8), 363. https://doi.org/10.3390/info13080363