


Second-Order Modified Nonstandard Explicit Euler and Explicit Runge–Kutta Methods for n-Dimensional Autonomous Differential Equations



Abstract
1. Introduction
2. Main Results
2.1. General Second-Order Modified Nonstandard Explicit Euler Method
- (I)
- for all .
- (II)
- , for all hyperbolic equilibria of Equation (1) with and for all .
- Then, the modified nonstandard explicit Euler method
- If , then
- (a)
- , for all , and
- (b)
- , for all and some , and
- Then, the functions
- (I)
- for all .
- (II)
- , , , for all hyperbolic equilibria of Equation (1) with and for all ,
2.2. General Second-Order Modified Nonstandard ERK2 Method
- (I)
- ,
- (II)
- , for all , where , and Γ denotes the set of all hyperbolic equilibria of System (1).
- Then, the modified nonstandard two-stage ERK2 method for approximating the solution of Equation (1)
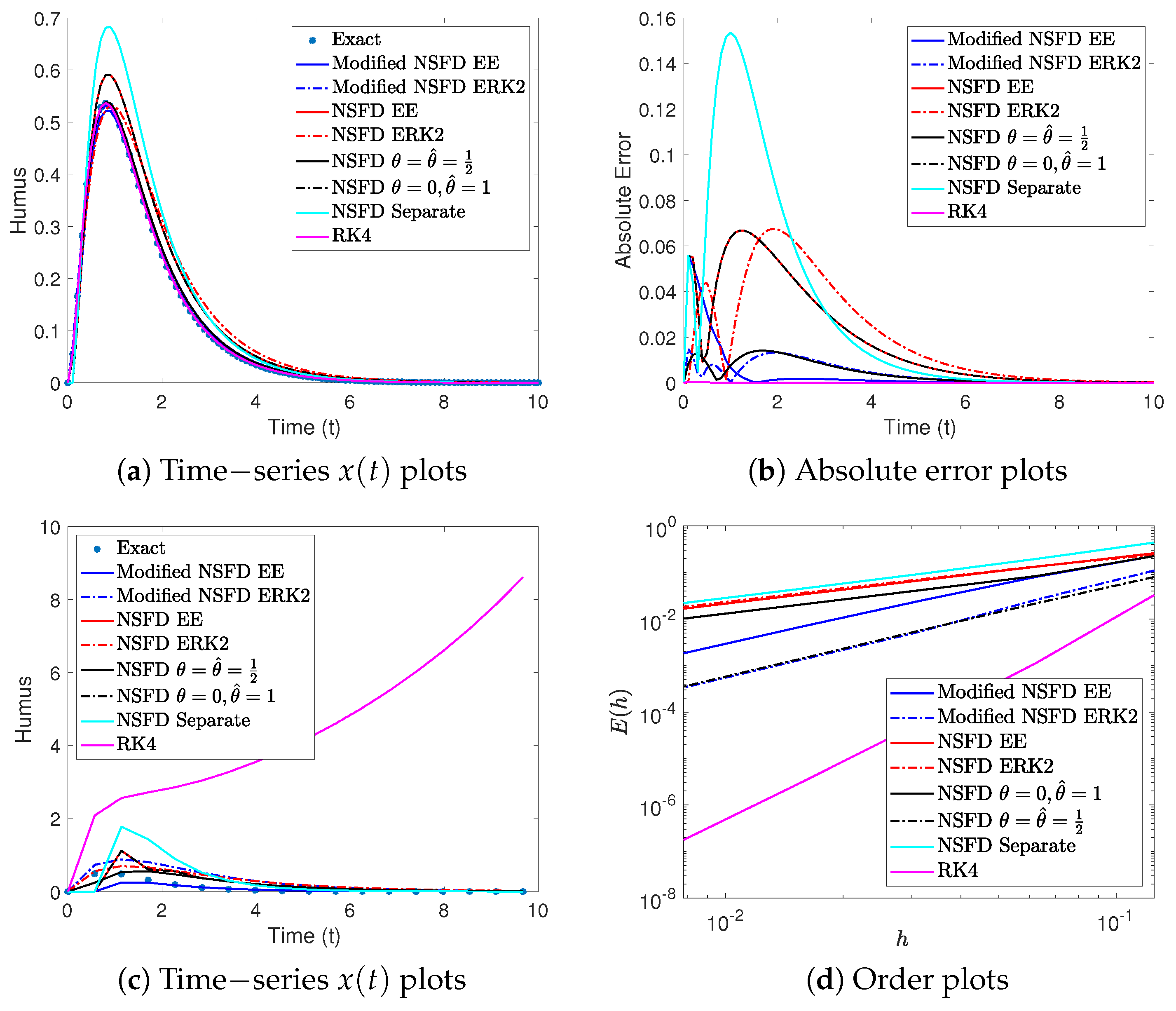
3. Numerical Simulations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mickens, R. Nonstandard Finite Difference Models of Differential Equations; World Scientific: Singapore, 1994. [Google Scholar]
- Dimitrov, D.; Kojouharov, H. Positive and elementary stable nonstandard numerical methods with applications to predator-prey models. J. Comput. Appl. Math. 2006, 189, 98–108. [Google Scholar] [CrossRef]
- Mickens, R.E. Numerical integration of population models satisfying conservation laws: NSFD methods. J. Biol. Dyn. 2007, 1, 427–436. [Google Scholar] [CrossRef] [PubMed]
- González-Parra, G.; Arenas, A.J.; Chen-Charpentier, B.M. Combination of nonstandard schemes and Richardson’s extrapolation to improve the numerical solution of population models. Math. Comput. Model. 2010, 52, 1030–1036. [Google Scholar] [CrossRef]
- Patidar, K.C.; Ramanantoanina, A. A non-standard finite difference scheme for a class of predator–prey systems with non-monotonic functional response. J. Differ. Equ. Appl. 2021, 27, 1310–1328. [Google Scholar] [CrossRef]
- Calatayud, J.; Jornet, M. An improvement of two nonstandard finite difference schemes for two population mathematical models. J. Differ. Equ. Appl. 2021, 27, 422–430. [Google Scholar] [CrossRef]
- Anguelov, R.; Lubuma, J.M.S. Forward invariant set preservation in discrete dynamical systems and numerical schemes for ODEs: Application in biosciences. Adv. Contin. Discret. Model. 2023, 2023. [Google Scholar] [CrossRef]
- Alalhareth, F.K.; Mendez, A.C.; Kojouharov, H.V. A simple model of nutrient recycling and dormancy in a chemostat: Mathematical analysis and a second-order nonstandard finite difference method. Commun. Nonlinear Sci. Numer. Simul. 2024, 132, 107940. [Google Scholar] [CrossRef]
- Arenas, A.J.; Moraño, J.A.; Cortés, J.C. Non-standard numerical method for a mathematical model of RSV epidemiological transmission. Comput. Math. Appl. 2008, 56, 670–678. [Google Scholar] [CrossRef]
- Anguelov, R.; Dumont, Y.; Lubuma, J.S.; Shillor, M. Comparison of Some Standard and Nonstandard Numerical Methods for the MSEIR Epidemiological Model. AIP Conf. Proc. 2009, 1168, 1209–1212. [Google Scholar]
- Arenas, A.J.; González-Parra, G.; Chen-Charpentier, B.M. A nonstandard numerical scheme of predictor–corrector type for epidemic models. Comput. Math. Appl. 2010, 59, 3740–3749. [Google Scholar] [CrossRef]
- Garba, S.; Gumel, A.; Lubuma, J.S. Dynamically-consistent non-standard finite difference method for an epidemic model. Math. Comput. Model. 2011, 53, 131–150. [Google Scholar] [CrossRef]
- Obaid, H.A.; Ouifki, R.; Patidar, K.C. An unconditionally stable nonstandard finite difference method applied to a mathematical model of HIV infection. Int. J. Appl. Math. Comput. Sci. 2013, 23, 357–372. [Google Scholar] [CrossRef]
- Anguelov, R.; Dumont, Y.; Lubuma, J.; Shillor, M. Dynamically consistent nonstandard finite difference schemes for epidemiological models. J. Comput. Appl. Math. 2014, 255, 161–182. [Google Scholar] [CrossRef]
- Berge, T.; Lubuma, J.S.; Moremedi, G.; Morris, N.; Kondera-Shava, R. A simple mathematical model for Ebola in Africa. J. Biol. Dyn. 2017, 11, 42–74. [Google Scholar] [CrossRef]
- Obaid, H.A.; Ouifki, R.; Patidar, K.C. A nonstandard finite difference method for solving a mathematical model of HIV-TB co-infection. J. Differ. Equ. Appl. 2017, 23, 1105–1132. [Google Scholar] [CrossRef]
- Anguelov, R.; Dukuza, K.; Lubuma, J.M.S. Backward bifurcation analysis for two continuous and discrete epidemiological models. Math. Methods Appl. Sci. 2018, 41, 8784–8798. [Google Scholar] [CrossRef]
- Anguelov, R.; Berge, T.; Chapwanya, M.; Djoko, J.; Kama, P.; Lubuma, J.M.S.; Terefe, Y. Nonstandard finite difference method revisited and application to the Ebola virus disease transmission dynamics. J. Differ. Equ. Appl. 2020, 26, 818–854. [Google Scholar] [CrossRef]
- Vaz, S.; Torres, D.F.M. A dynamically-consistent nonstandard finite difference scheme for the SICA model. Math. Biosci. Eng. 2021, 18, 4552–4571. [Google Scholar] [CrossRef]
- Adamu, E.M.; Patidar, K.C.; Ramanantoanina, A. An unconditionally stable nonstandard finite difference method to solve a mathematical model describing Visceral Leishmaniasis. Math. Comput. Simul. 2021, 187, 171–190. [Google Scholar] [CrossRef]
- Chapwanya, M.; Lubuma, J.; Terefe, Y.; Tsanou, B. Analysis of War and Conflict Effect on the Transmission Dynamics of the Tenth Ebola Outbreak in the Democratic Republic of Congo. Bull. Math. Biol. 2022, 84, 136. [Google Scholar] [CrossRef]
- Ouemba Tassé, A.J.; Kubalasa, V.B.; Tsanou, B.; Jean, M.-S.L. Nonstandard finite difference schemes for some epidemic optimal control problems. Math. Comput. Simul. 2024, 228, 1–22. [Google Scholar] [CrossRef]
- Bruggeman, J.; Burchard, H.; Kooi, B.W.; Sommeijer, B. A second-order, unconditionally positive, mass-conserving integration scheme for biochemical systems. Appl. Numer. Math. 2007, 57, 36–58. [Google Scholar] [CrossRef]
- Benz, J.; Meister, A.; Zardo, P. A conservative, positivity preserving scheme for advection-diffusion-reaction equations in biochemical applications. In Hyperbolic Problems: Theory, Numerics and Applications, Proceedings of the Twelfth International Conference on Hyperbolic Problems, Center for Scientific Computation and Mathematical Modeling, University of Maryland, College Park, MD, USA, 9–13 June 2008; Tadmor, E., Liu, J.G., Tzavaras, A., Eds.; American Mathematical Society: Providence, RI, USA, 2009; Volume 67, pp. 399–408. [Google Scholar]
- Burchard, H.; Deleersnijder, E.; Meister, A. A high-order conservative Patankar-type discretisation for stiff systems of production–destruction equations. Appl. Numer. Math. 2003, 47, 1–30. [Google Scholar] [CrossRef]
- Wood, D.; Dimitrov, D.; Kojouharov, H. A nonstandard finite difference method for n-dimensional productive-destructive systems. J. Differ. Equ. Appl. 2015, 21, 240–254. [Google Scholar] [CrossRef]
- Patidar, K.C. On the use of nonstandard finite difference methods. J. Differ. Equ. Appl. 2005, 11, 735–758. [Google Scholar] [CrossRef]
- Patidar, K.C. Nonstandard finite difference methods: Recent trends and further developments. J. Differ. Equ. Appl. 2016, 22, 817–849. [Google Scholar] [CrossRef]
- Mickens, R.E. Nonstandard Finite Difference Schemes; World Scientific: Singapore, 2020. [Google Scholar]
- Anguelov, R.; Lubuma, J. Contributions to the mathematics of the nonstandard finite difference method and applications. Numer. Methods Partial. Differ. Equ. 2001, 17, 518–543. [Google Scholar] [CrossRef]
- Lubuma, J.M.S.; Roux, A. An Improved Theta-method for Systems of Ordinary Differential Equations. J. Differ. Equ. Appl. 2003, 9, 1023–1035. [Google Scholar] [CrossRef]
- Dimitrov, D.; Kojouharov, H. Nonstandard finite-difference schemes for general two-dimensional autonomous dynamical systems. Appl. Math. Lett. 2005, 18, 769–774. [Google Scholar] [CrossRef]
- Dang, Q.A.; Hoang, M.T. Positive and elementary stable explicit nonstandard Runge-Kutta methods for a class of autonomous dynamical systems. Int. J. Comput. Math. 2020, 97, 2036–2054. [Google Scholar] [CrossRef]
- Gupta, M.; Slezak, J.; Alalhareth, F.; Roy, S.; Kojouharov, H.V. Second-order Modified Nonstandard Explicit Runge-Kutta And Theta Methods for One-dimensional Autonomous Differential Equations. Appl. Appl. Math. Int. J. (AAM) 2021, 16, 788–803. [Google Scholar]
- Hoang, M.T. A novel second-order nonstandard finite difference method for solving one-dimensional autonomous dynamical systems. Commun. Nonlinear Sci. Numer. Simul. 2022, 114, 106654. [Google Scholar] [CrossRef]
- Roeger, L.I.W. Nonstandard finite-difference schemes for the Lotka–Volterra systems: Generalization of Mickens’s method. J. Differ. Equ. Appl. 2006, 12, 937–948. [Google Scholar] [CrossRef]
- Izgin, T.; Kopecz, S.; Meister, A. On the stability of unconditionally positive and linear invariants preserving time integration schemes. SIAM J. Numer. Anal. 2022, 60, 3029–3051. [Google Scholar] [CrossRef]
- Izgin, T.; Kopecz, S.; Meister, A. On Lyapunov stability of positive and conservative time integrators and application to second order modified Patankar–Runge–Kutta schemes. ESAIM Math. Model. Numer. Anal. 2022, 56, 1053–1080. [Google Scholar] [CrossRef]
- Wood, D.T.; Kojouharov, H.V.; Dimitrov, D.T. Universal approaches to approximate biological systems with nonstandard finite difference methods. Math. Comput. Simul. 2017, 133, 337–350. [Google Scholar] [CrossRef]
- Songolo, M.E.; Bidégaray-Fesquet, B. Extending nonstandard finite difference scheme rules to systems of nonlinear ODEs with constant coefficients. J. Differ. Equ. Appl. 2024, 30, 577–602. [Google Scholar] [CrossRef]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics; Springer: Berlin/Heidelberg, Germany, 2007; 657p. [Google Scholar]
- Dear, J.; Shi, Z.; Lin, J. An efficient numerical integration system for stiff unified constitutive equations for metal forming applications. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1270, 012008. [Google Scholar] [CrossRef]
- Hajiketabi, M.; Casas, F. Numerical integrators based on the Magnus expansion for nonlinear dynamical systems. Appl. Math. Comput. 2020, 369, 124844. [Google Scholar] [CrossRef]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | Modified NSFD EE | Modified NSFD ERK2 | NSFD EE | NSFD ERK2 | NSFD | NSFD | NSFD Separate | RK4 |
|---|---|---|---|---|---|---|---|---|
| Rate | 1.93 | 1.99 | 0.99 | 1.00 | 1.99 | 1.00 | 1.01 | 4.05 |
| h | Modified NSFD EE | Modified NSFD ERK2 |
|---|---|---|
| Rate | 1.93 | 1.93 |
| Modified NSFD EE | Modified NSFD ERK2 | MATLAB® ode23s | MATLAB® ode23 | MATLAB® ode15s | MATLAB® ode23t | Rosenbrock | Magnus | ||
|---|---|---|---|---|---|---|---|---|---|
| Execution time | |||||||||
| Computational cost coefficient | Modified NSFD EE | 1.00 | 0.28 | 3.11 | 0.76 | 1.97 | 2.13 | 4.24 | 18.1 |
| Modified NSFD ERK2 | 3.55 | 1.00 | 11.05 | 2.71 | 7.01 | 7.54 | 15.08 | 64.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alalhareth, F.K.; Gupta, M.; Kojouharov, H.V.; Roy, S. Second-Order Modified Nonstandard Explicit Euler and Explicit Runge–Kutta Methods for n-Dimensional Autonomous Differential Equations. Computation 2024, 12, 183. https://doi.org/10.3390/computation12090183
Alalhareth FK, Gupta M, Kojouharov HV, Roy S. Second-Order Modified Nonstandard Explicit Euler and Explicit Runge–Kutta Methods for n-Dimensional Autonomous Differential Equations. Computation. 2024; 12(9):183. https://doi.org/10.3390/computation12090183
Chicago/Turabian StyleAlalhareth, Fawaz K., Madhu Gupta, Hristo V. Kojouharov, and Souvik Roy. 2024. "Second-Order Modified Nonstandard Explicit Euler and Explicit Runge–Kutta Methods for n-Dimensional Autonomous Differential Equations" Computation 12, no. 9: 183. https://doi.org/10.3390/computation12090183
APA StyleAlalhareth, F. K., Gupta, M., Kojouharov, H. V., & Roy, S. (2024). Second-Order Modified Nonstandard Explicit Euler and Explicit Runge–Kutta Methods for n-Dimensional Autonomous Differential Equations. Computation, 12(9), 183. https://doi.org/10.3390/computation12090183