Abstract
Many studies on flexible strain and pressure sensors have been reported due to growing interest in wearable devices for healthcare purposes. Here, we present flexible pressure and strain (motion) sensors prepared with only graphene oxide (GO) and commercial silk fabrics and yarns. The pressure sensors were fabricated by simply dipping the silk fabric into GO solution followed by applying a thermal treatment at 400 °C to obtain reduced GO (rGO). The pressure sensors were made from rGO-coated fabrics, which were stacked in three, five, and seven layers. A super-sensitivity of 2.58 × 103 kPa−1 at low pressure was observed in the seven-layer pressure sensor. The strain sensors were obtained from rGO-coated twisted silk yarns whose gauge factor was 0.307. Although this value is small or comparable to the values for other sensors, it is appropriate for motion sensing. The results of this study show a cost-effective and simple method for the fabrication of pressure and motion sensors with commercial silk and GO.
1. Introduction
Flexible electronic components are steadily being developed for various applications, including electrically conductive textiles [1,2,3,4], thermoelectric textiles [5,6,7], solar cells [8], secondary batteries [9], and gas sensors [10,11,12]. Among them, flexible mechanical sensors (strain and pressure sensors) have been of interest because of their utility for sensing human body functions for healthcare purposes and for use in applications related to the Internet of Things (IoT). In particular, textile-based mechanical sensors have the advantage of being lightweight and low-cost and having superior flexibility [13,14,15,16]. Commercial textiles such as cotton, nylon, polyester, and silk have been used as flexible substrates for such sensors. However, other components are used to ensure high sensitivity and flexibility.
Cotton fabric has been decorated with Ag nanowires, Ag flowers, and Ag thread [17,18,19,20]; coatings of electrochemically exfoliated graphene film have been applied on cotton fabric [21]; and coatings of Ag have been applied to cotton yarn using Ag paste followed by sintering [22] to provide electrical conductivity. Likewise, electronic textiles for sensors fabricated with nylon and polyester have been created using conductive polymers [23], Au and MoS2 coating [24], graphite-polyurethane (PU) coating applied to crochet knitted elastic [25], the screen printing of elastic conductive carbon ink on polyester fabric [26], the wet spinning of CNT/thermoplastic PU on silver-plated nylon electrodes [27], the coating of CNT/carbon black PU on fabric with Ag-coated conductive nylon fiber [28], and the spraying of multiwall CNT/TiO2 conductive suspensions on nylon textiles [29]. Mxene has also been applied to textiles to improve sensitivity [30,31,32,33,34]. In the previous studies mentioned above, complex processes are inevitably required for the fabrication of the sensors.
In the case of silk, C. Wang et al. reported that wearable strain sensors fabricated using carbonized silk fabric had a large gauge factor, but an elastic polymer was used due to the thermal instability of carbonized silk [35]. A pressure sensor was fabricated using Ag nanowires coiled onto silk-fiber-wrapped PU [36], 3D graphene oxide (GO), and a silk fibroin mixture thermally reduced at 700 °C [37]. However, its sensitivity was very low (0.136~0.54 kPa−1).
Graphene has attracted attention due to its unique properties and great potential for use in diverse fields [38,39,40,41]. However, the need to obtain large quantities of graphene has hindered it from being adopted for various applications. The use of GO is one of the most promising methods of solving this problem. Mechanical sensors fabricated with GO have been reported [37]. Z. Yang et al. reported the production of direction-dependent strain sensors using GO and polyester [42]. Twisted graphene fiber for motion sensing was created using GO and elastic Lycra warp yarns [43]. Strain sensors created using rGO and ecoflex showed low sensitivity (S = 0.122 kPa−1) and high GF (31.6 at 400% strain) [44]. Using GO-coated PU and carbonization followed by polypyrrole attachment, R. Wang et al. synthesized a pressure sensor whose GF was 0.770 near 40% strain [45]. Even though the mechanical sensors were devised successfully, their fabrication also involved a complicated procedure and needed multiple ingredients.
Here, we report flexible pressure and strain sensors fabricated using reduced GO (rGO)-coated commercial silk (rGOS) fabrics and yarns. The GO was coated using a simple dipping method, and then the GO-coated silk (GOS) was thermally reduced at 400 °C. The pressure and strain sensors were prepared by stacking small pieces of rGOS fabrics and twisting rGOS yarns, respectively. The pressure sensor showed superior sensitivity (2.58 × 103 kPa−1 at low pressure and 1.842 kPa−1 at high pressure). The gauge factor (GF) of the strain sensor was relatively low (~0.307), but the strain sensor was able to detect human motion (bending) and had good cyclability even after 5000 cycles.
2. Materials and Methods
GO was synthesized with graphite powder (99.995% metals basis, Alfa Aesar, Ward Hill, MA, USA) using the modified Hummers method [46]. GO was dissolved in DI water and sonicated for 1.0 h. The GO concentration was 1.0 mg/mL. GO was coated onto commercial silk fabrics by simply dipping them for 30 min, and then the GOS fabric was dried at 40 °C under a fume hood. This process was repeated three times to produce a uniform coating of GO [2,12]. The GOS fabric was thermally reduced. The rGOS fabrics for the pressure sensors were obtained via thermal treatment at 400 °C for 2.0 h at a heating rate of 1.0 °C/min in N2 atmosphere. The rGOS fabrics were cut into 1.0 cm × 1.0 cm pieces, and then three pressure sensors were made depending on the number of fabrics. The strain sensors were fabricated by twisting the GOS yarns with an electrically powered drill. After twisting the GOS yarns, they were thermally treated under the same conditions.
To observe the morphology of the samples, field-emission scanning electron microscopy (FE-SEM, JSM-7800F, JEOL, Akishima, Tokyo, Japan) was used. The structure of the rGOS was determined using X-ray diffraction (XRD, SmartLab, Rigaku, Tokyo, Japan) with Cu Kα radiation (λ = 1.5418 Å), X-ray photoelectron spectroscopy (XPS, PHI 5000 Versa Probe II, Ulvac-PHI 5000 Versa Probe, Phi(Ø), Chigasaki, Japan), and Raman spectroscopy (Raman-LTPL system, Witec alpha300, Witec, Ulm, Germany) using a 532 nm laser. The size of the GO was measured using atomic force microscopy (AFM, XE-NSOM, Park Systems, Suwon, Korea). Sensing performance was measured using a Keithley 6221 current source, Keithley 6517 digital multimeter, and Keithley 2182A nanovoltmeter (Keithley, Solon, OH, USA).
3. Results and Discussion
3.1. Structural Investigation
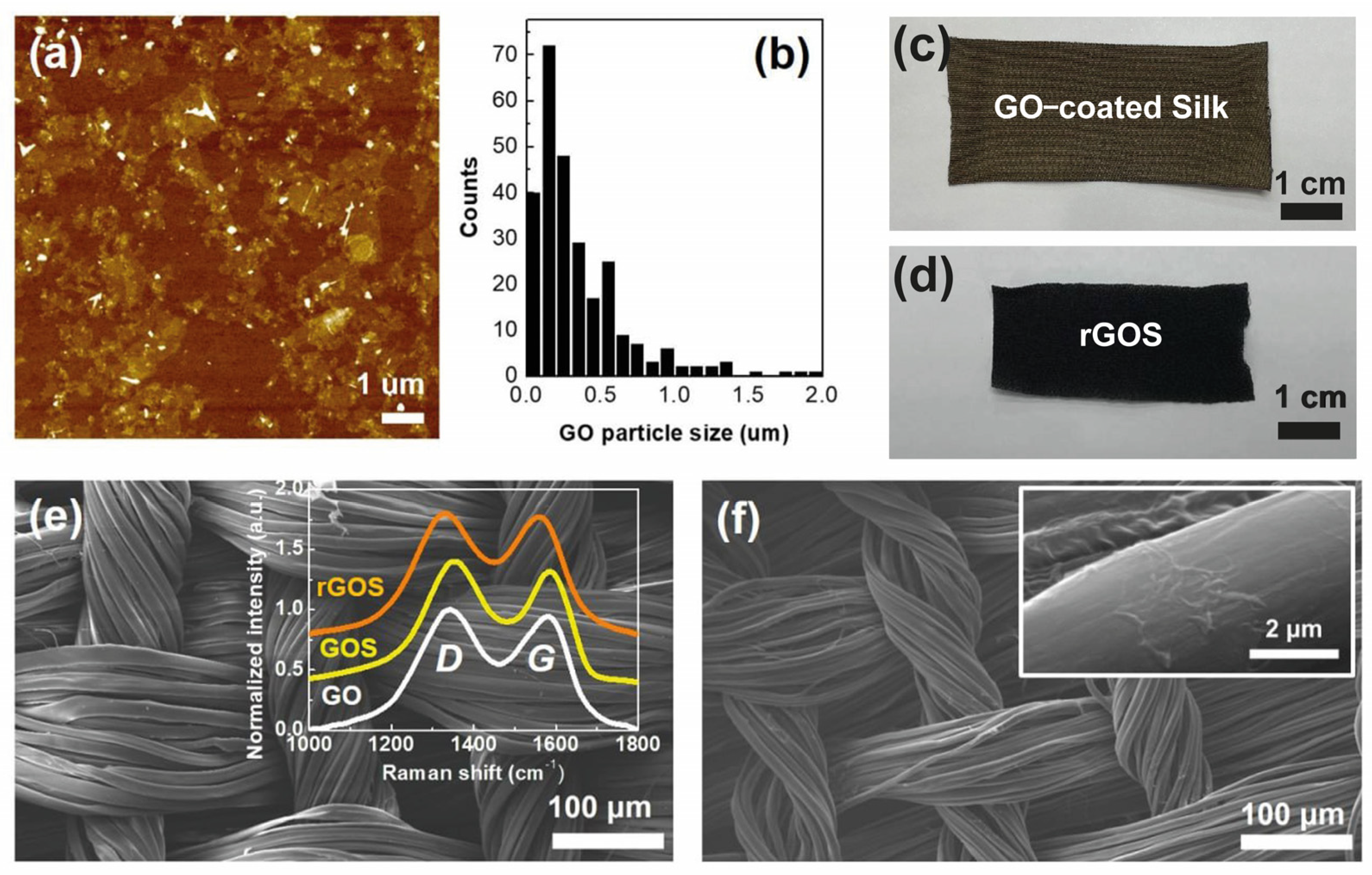
The as-synthesized GO samples were dispersed in DI water and then dropped onto a SiO2/Si wafer to measure the size of the GO using AFM (Figure 1a). The distribution of the lateral size was from 50 nm to 1.95 μm (Figure 1b). The average size of the GO samples was 349 ± 152 nm (the average particle size and its standard deviation are shown in Figure S1). Figure 1c,d show optical images of the GOS and rGOS, respectively. After thermal treatment, the dark brown color of the GOS changed to black (rGOS), and the size of the fabric was reduced. The shrinkage of the fabric was also observed in SEM images of the GOS (Figure 1e) and rGOS (Figure 1f). Wrinkles on the surface of the silk were observed, demonstrating that GO had been coated on the silk surface (the inset of Figure 1f).
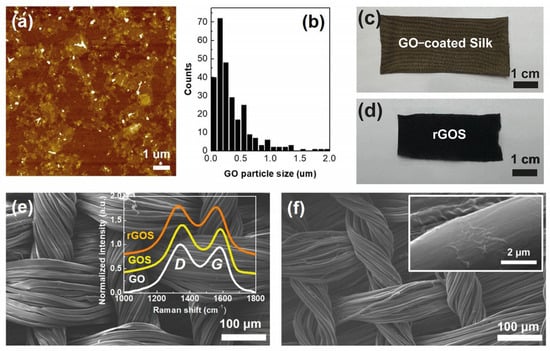
Figure 1.
(a) AFM image and (b) the sizes of the GO particles. Optical images of (c) GOS and (d) rGOS fabrics. SEM images of (e) GOS and (f) rGOS fabrics. The inset in (e) shows the Raman D and G peaks of GO, GOS, and rGOS. The inset in (f) shows that GO samples were well coated onto the surface of the silk.
The Raman spectroscopy examination of GOS and rGOS confirmed the existence of GO on the silk (as shown in the inset of Figure 1e). D and G peaks were observed in the GO, GOS, and rGOS. The D band arises from defects (disorder), and the G band is related to C-C stretching of the sp2 carbon [47]. The D peaks were at 1341, 1359, and 1330 cm−1 and the G peaks were at 1584, 1587, and 1558 cm−1 for the GO, GOS, and rGOS, respectively. The peak shifts in the GOS compared with GO are attributed to overlapping with the peaks from the silk. After thermal treatment (rGOS), the D and G peaks were red-shifted, moving from 1359 cm−1 to 1330 cm−1 for the D peak and from 1587 cm−1 to 1558 cm−1 for the G peak. This indicates the increase in the translational symmetry of the GOS due to the thermal treatment. This behavior was also observed for the ID/IG ratio. The ID/IG ratios of the GO, GOS, and rGOS were 1.06, 1.06, and 1.01, respectively.
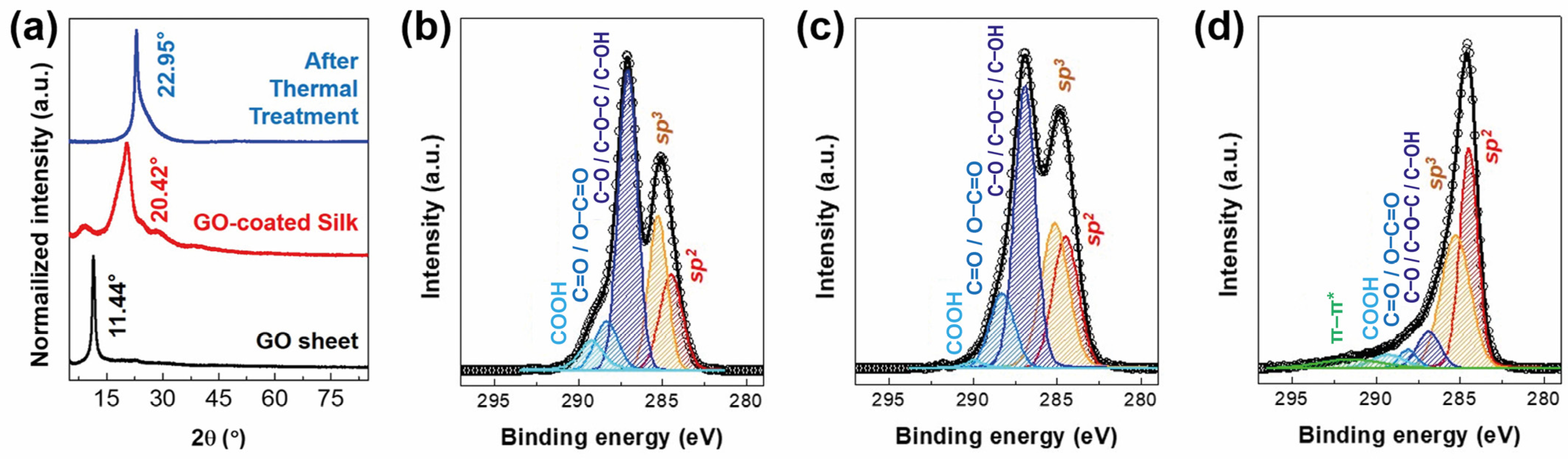
Figure 2a displays the normalized XRD patterns of the GO sheet, GOS, and rGOS. The peak at 11.44° ((001) plane) of the GO sheet indicates that the interlayer distance of the GO is 7.732 Å. The XRD patterns of the GOS were similar to those of pristine silk [48]. After heat treatment, the peak for the (002) lattice plane at 22.95° appeared in the rGOS. The relatively broad peak for the (002) plane originated from the overlapping of various amorphous structures [49].
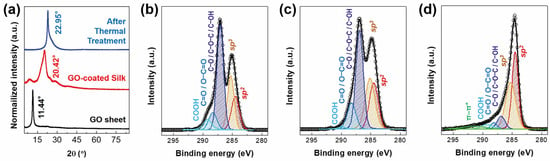
Figure 2.
(a) XRD patterns of the GO, GOS, and rGOS. XPS C1s peaks of (b) GO, (c) GOS, and (d) rGOS. A decrease in the number of oxygen functional groups was observed in the rGOS.
The decrease in the number of oxygen functional groups due to thermal treatment was investigated using the XPS C1s peak (Figure 2b–d). A large number of oxygen functional groups (COOH, C=O/O−C=O, and C−O/C−O−C/C−OH) were clearly observed in the GO sheet (Figure 2b) and GOS (Figure 2c). In contrast, the number of functional groups significantly decreased in rGOS (Figure 2d). At the O1s peak, the quantities of O−H, C−O, and C=O species in the GOS were similar to those in the GO sheet, but the number of C−O bonds decreased in the rGOC (Figure S2a–c). The nitrogen from the silk was found in the N1s peaks of the GOS and rGOS (Figure S2d–f). Interestingly, pyridinic N developed after thermal treatment, resulting from the carbonized silk. The XRD, Raman spectroscopy, and XPS studies showed the reduction of GO and the carbonization of silk, which endow electrical conductivity to rGOS.
3.2. Pressure Sensors
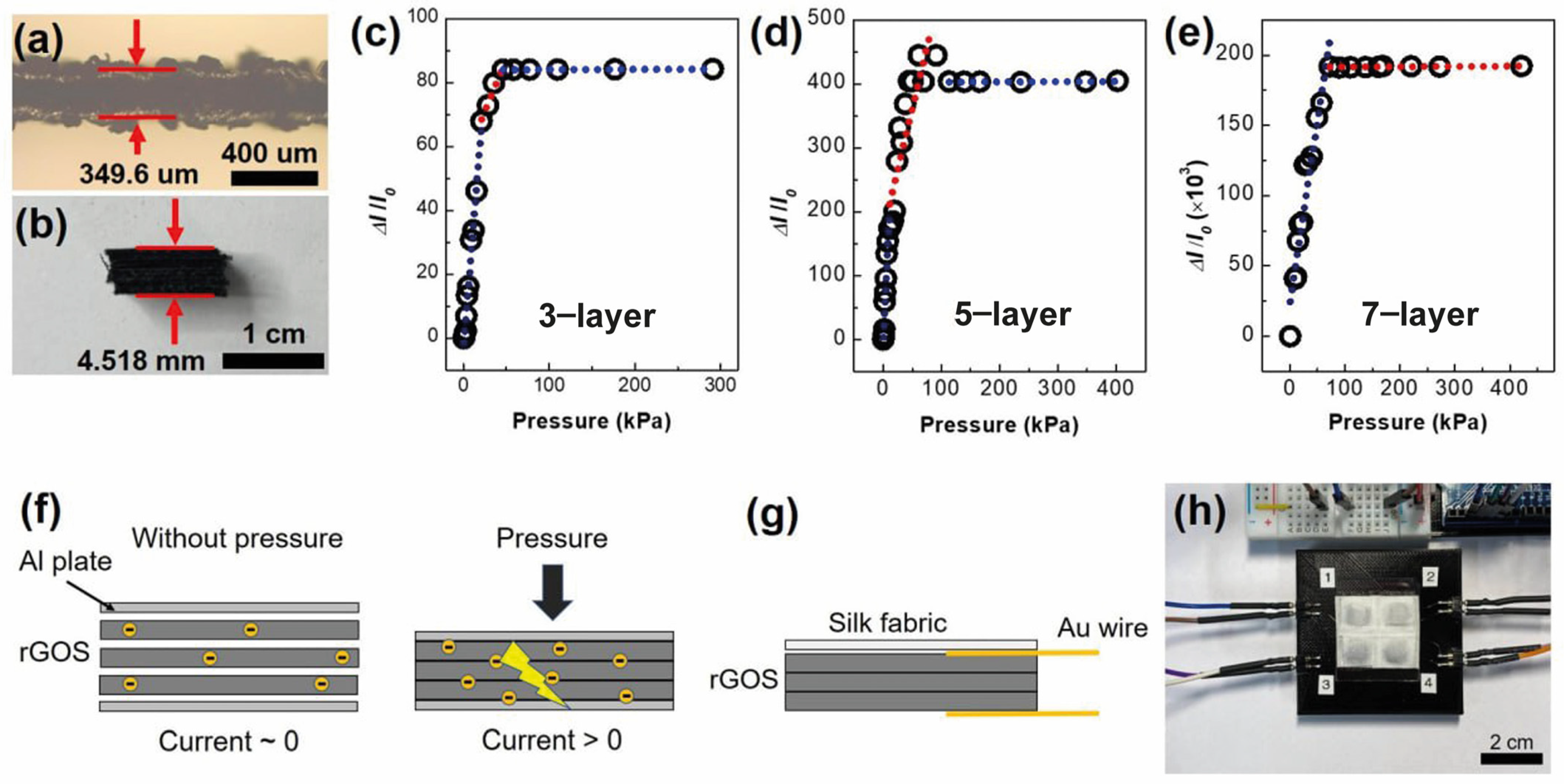
Figure 3a is a side view of a single piece of rGOS fabric. This fabric’s average thickness is 349.6 μm. Flexible pressure sensors were made very simply using the rGOS fabrics. First, the fabric was cut into a square, whose length on one side was 1.0 cm. Next, the cut fabrics were stacked between Al plates (Figure 3f). We chose to use three, five, and seven layers of fabric. The thickness of the seven-layer pressure sensor was about 4.52 mm (Figure 3b).
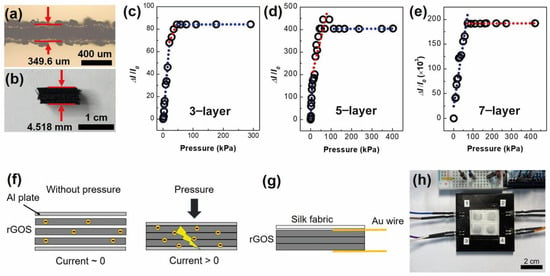
Figure 3.
Side−views of (a) a single rGOS fabric and (b) a 7−layer rGOS fabric. The sensitivities of the rGOS pressure sensors fabricated with (c) 3−layer, (d) 5−layer, and (e) 7−layer fabrics. (f) The operating mechanism of the pressure sensor. The yellow circles are charge carriers. (g) A schematic illustration of the textile−based pressure sensor module and (h) an optical image of the two−by−two pressure sensor module.
The sensitivity of the three sensors is depicted in Figure 3c–e. The sensitivity of the three-layer pressure sensor was 3.32 kPa−1 at low pressures (0.5–21 kPa), 0.662 kPa−1 at 21–46 kPa, and 0.665 × 10−3 kPa−1 at high pressures (46–290 kPa) (Figure 3c). For the five-layer pressure sensor, the sensitivity was 18.7 kPa−1 at low pressures (0.4–10.9 kPa), 3.82 kPa−1 at 10.9–91.3 kPa, and 2.57 × 10−3 kPa−1 at high pressures (91.3–402.1 kPa) (Figure 3d). Interestingly, an enormous increase in sensitivity was measured in the seven−layer pressure sensor. The sensitivities were 2.58 × 103 kPa−1 at low pressures (0.2–72.3 kPa) and 1.84 kPa−1 at high pressure (72.3–421 kPa) (Figure 3e). To the best of our knowledge, the sensitivity at low pressure of the seven-layer sensor is the best among all textile-based sensors, except for that of a pressure sensor fabricated with Ag nanowire (AgNW)−coated cotton fabric [17] (Table 1). The operation of the sensor is shown in Figure 3f. Without pressure, the resistance (R) of the sensor was large because the rGOS layers barely contacted each other, i.e., the charge carriers were isolated in each layer due to a large potential barrier in the vertical direction (as shown in the left panel in Figure 3f). As soon as pressure was applied, the layers contacted each other. This led to small potential barriers between the layers. Hence, the carriers freely moved between the layers, resulting in a significant decrease in the R (as shown in the right panel in Figure 3f). The amount of layer-dependent sensitivity was determined by the initial R of the sensors. The increase in layer number increased the initial R. For example, the resistances of the three-layer and seven-layer sensors were 0.42 MΩ and 958 MΩ, respectively.

Table 1.
Comparison of characteristics of the pressure sensors.
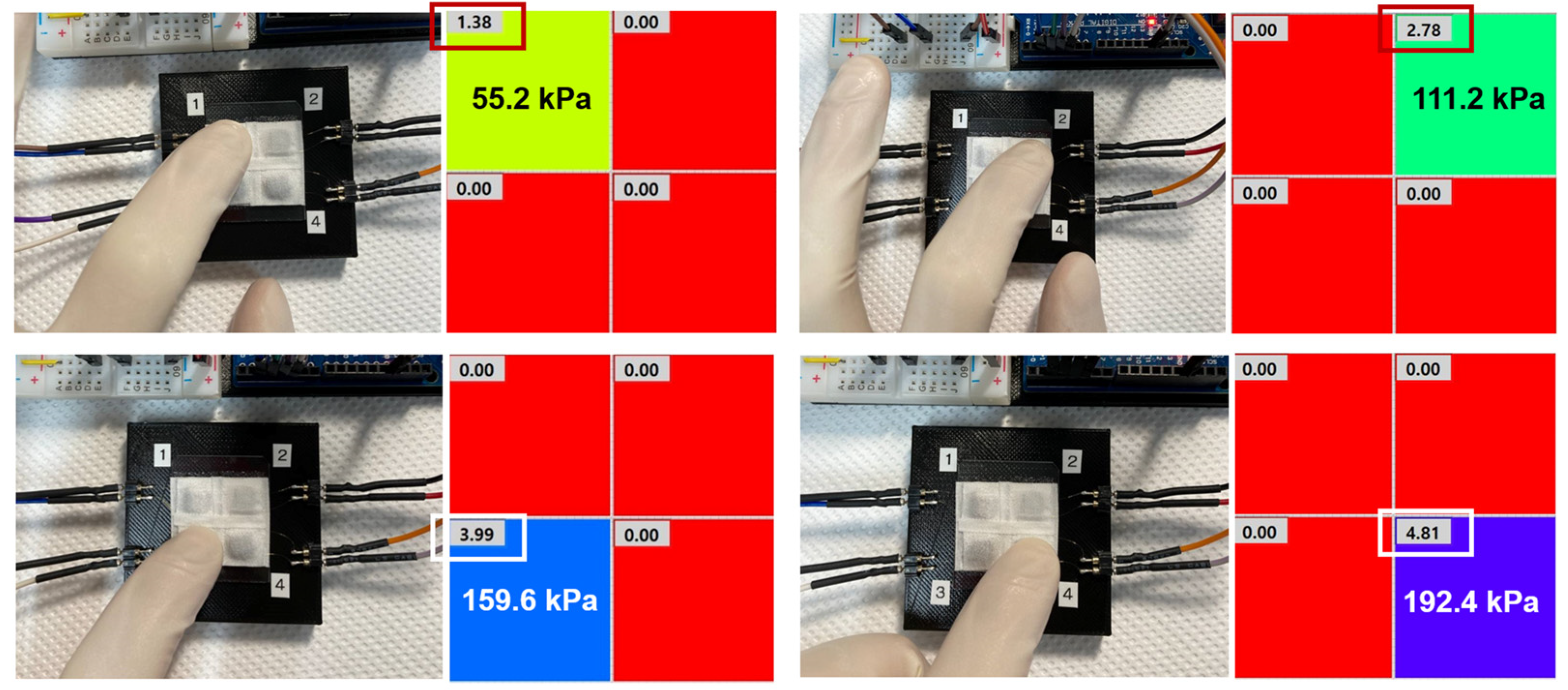
Drawing on these results, we fabricated a two-by-two pressure module using the rGOS fabrics (0.5 × 0.5 cm2) and Au wires. The surface of the module was protected with pristine silk fabric (Figure 3g,h). The module directly measured the applied force, indicated by different colors using the Labview program (Figure S3). Figure 4 displays measurements of the pressures of the four sensors in the module. The numbers in the red and white boxes indicate the applied forces. The response time of the sensors was 300 ms (Figure S4).
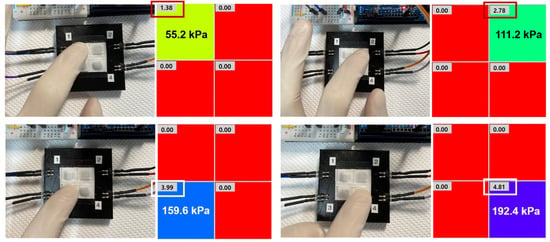
Figure 4.
Real-time pressure sensing of each sensor in the module depicted using the Labview program.
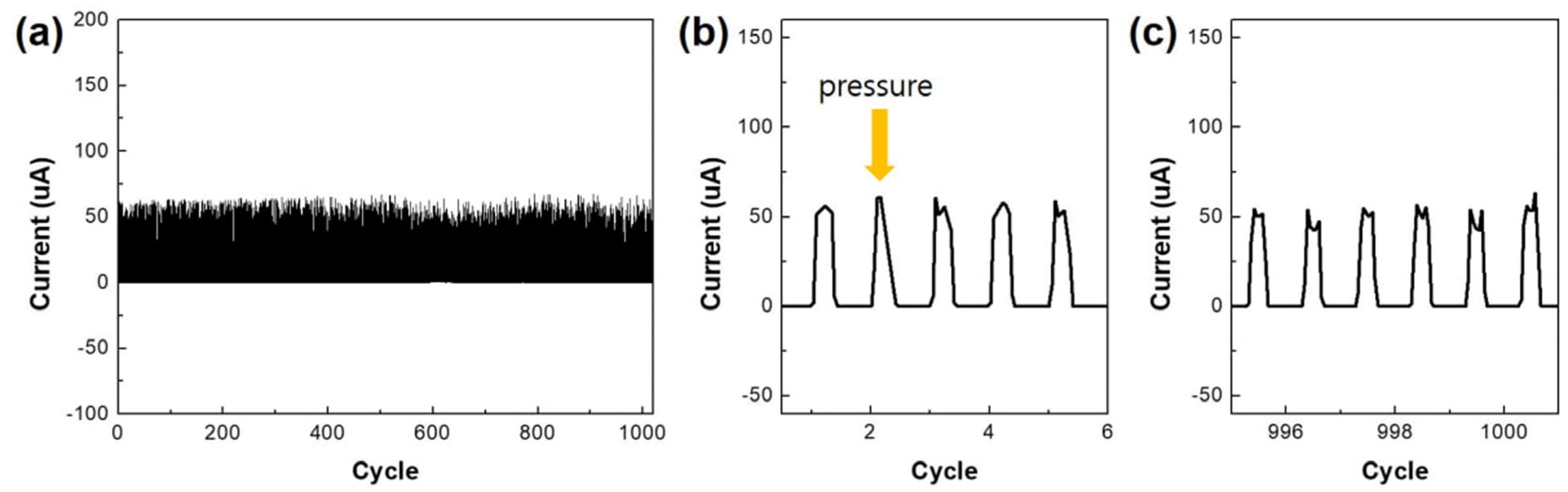
To check the cyclability of the pressure sensors, 2.0 kPa of pressure was applied to the seven-layer sensor using a homemade pressure machine with a step motor. When the pressure was applied, the current increased to near 50 μA. This value was maintained over 1000 cycles (Figure 5a). Figure 5b,c display variations in current near the first and 1000 cycles. It shows that the pressure sensor has good repeatability.
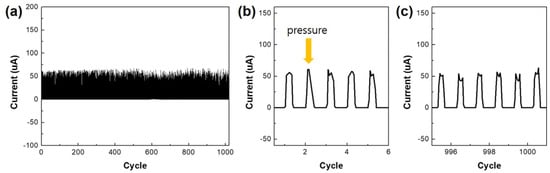
Figure 5.
(a) Repeatability of the 7−layer pressure sensor during 1000 cycles and near (b) the first cycles and (c) 1000 cycles.
3.3. Motion Sensors
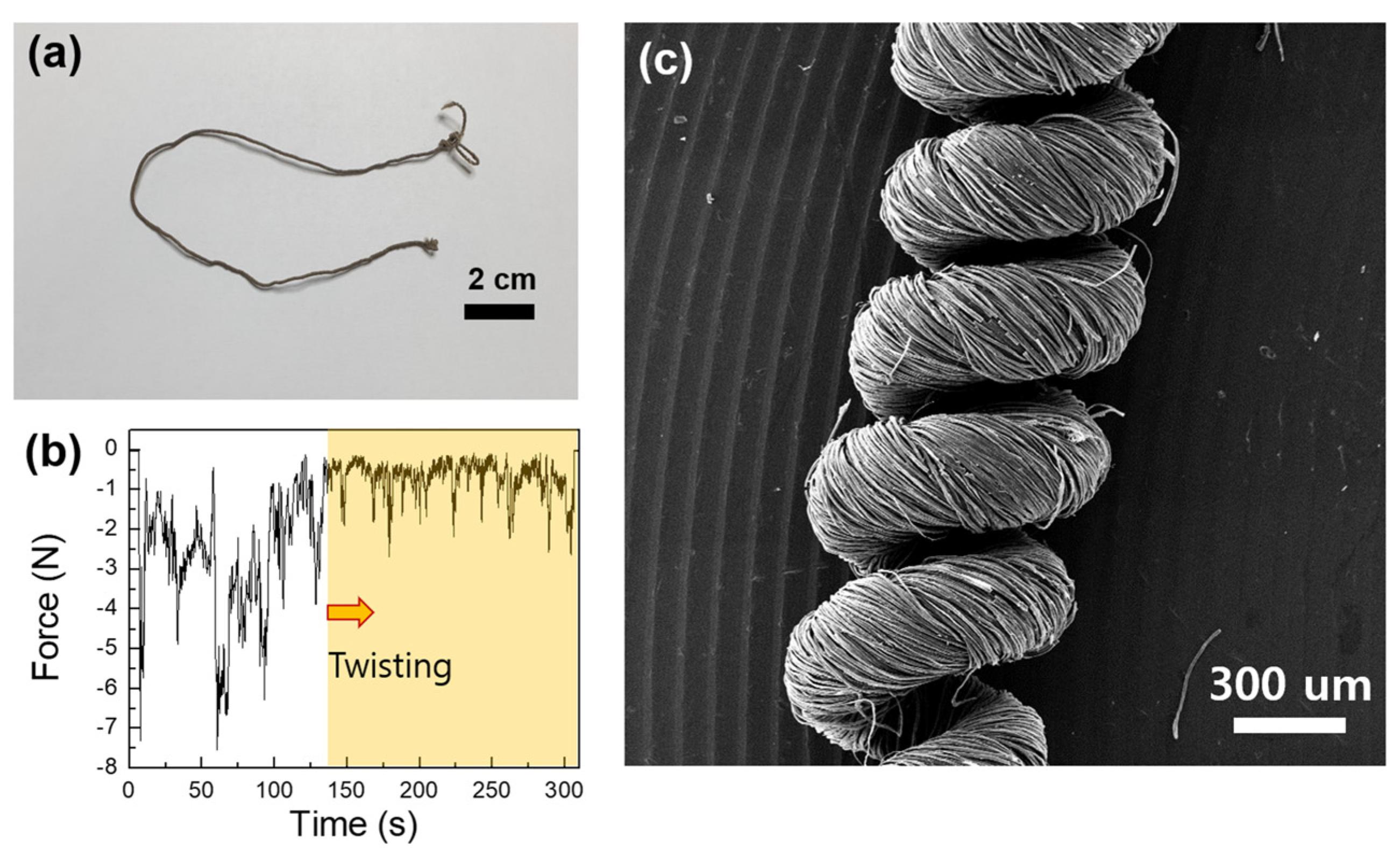
The strain sensors were fabricated with GOS yarns. First, the GO-coated yarn was twisted using an electrically powered drill (Figure 6a). Figure 6b shows the variation in force while twisting the yarn. Before being twisted, the force was unstable, but the force was relatively stable after twisting began (yellow box). Then, the twisted GOS yarn was thermally treated using the same conditions as those induced for fabricating the rGOS fabric. Evenly twisted yarn can be observed in the SEM image (Figure 6c).
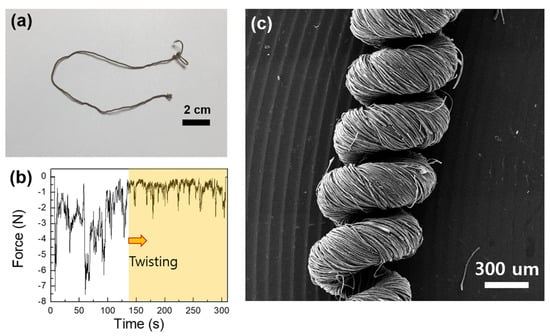
Figure 6.
(a) Optical image of the twisted rGOS yarn. (b) The variation in force during the twisting of the yarn. (c) SEM image of the twisted rGOS yarn.
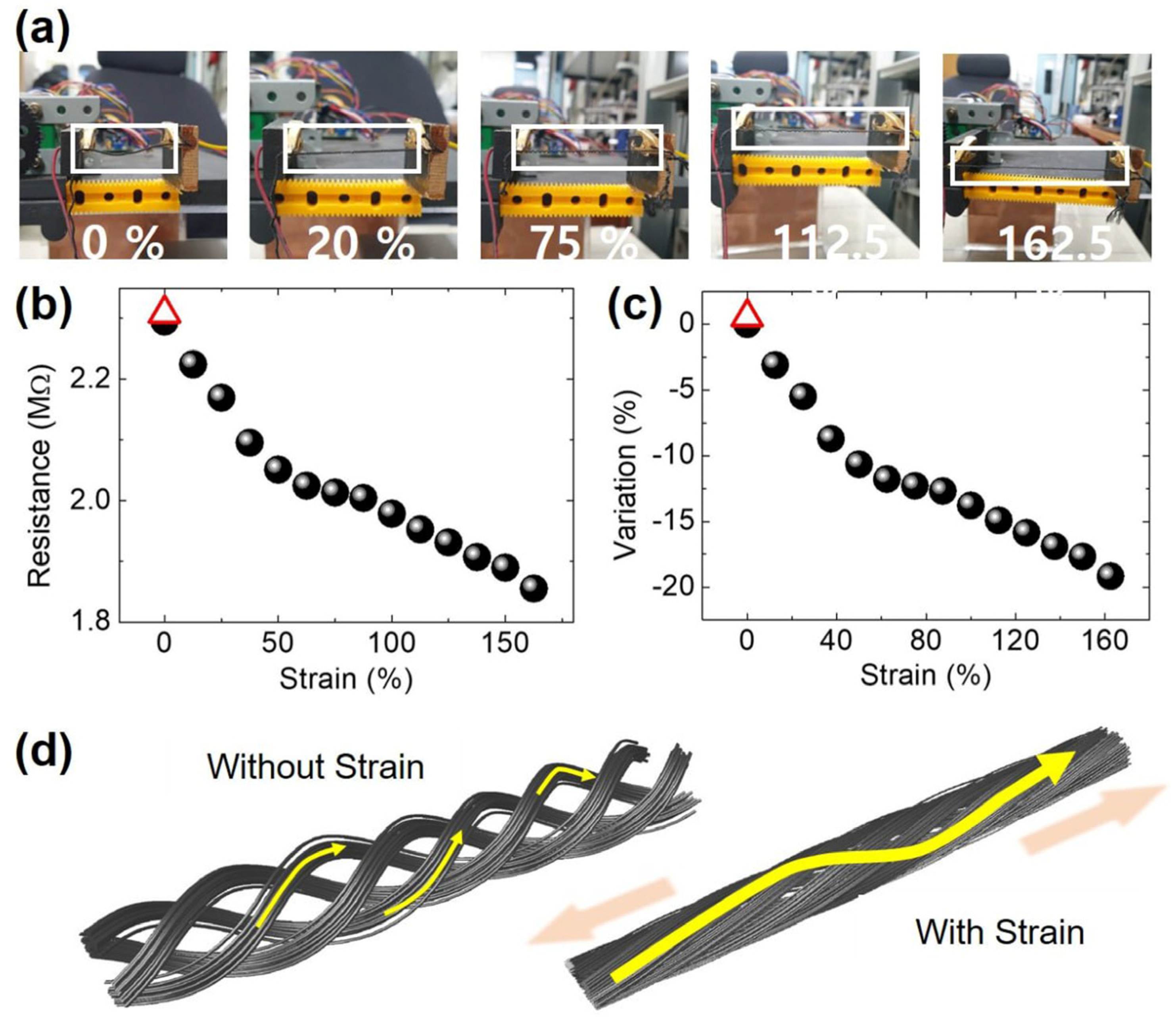
Figure 7 depicts the strain-dependent R. As the twisted yarn was stretched from 4.40 cm (L0) to 7.15 cm (162.5%) (Figure 7a), the R changed from 2.295 MΩ (R0) to 1.855 MΩ (Figure 7b). This decrease in R can be explained as follows. When the yarn was stretched, the diameter of the twisted yarn decreased from 543.2 μm at 0% strain to 377.9 μm at 160% strain (Figure S5). This means that the rGOS fibers in the stretched yarn contacted each other much better compared to the degree of contact for the unstretched yarn, causing an increase in electrically conductive paths (Figure 7d). Although the R slightly increased (R = 2.308 MΩ, see the red triangle in Figure 7), R almost recovered when the strain sensor was released again. The increase in R was caused by the breaking of some parts of the fibers when the yarn was stretched to its maximum, as shown in Figure S6. The variation in R was 19.17% at 162.5% stretching. The GF can be derived as follows: (ΔRL0)/(R0ΔL). The GF of the strain sensor was small (GF = 0.307) compared with that reported in previous studies [25,29,33,35], but it was larger than that of cotton yarn produced using Ag-paste [22] and Ag-coated nylon [50]. Hence, we found that the twisted rGOC yarn could be used as a motion sensor.
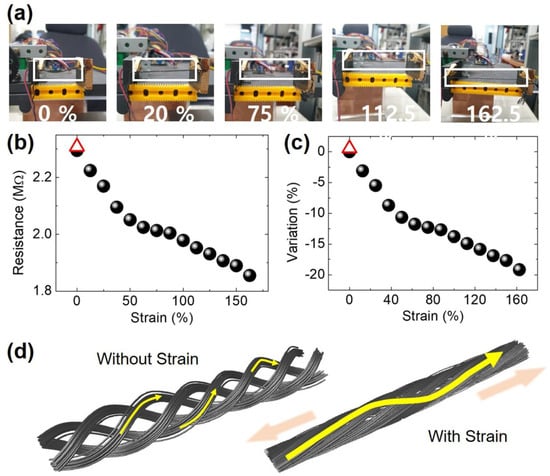
Figure 7.
(a) Optical images of the application of strain to the twisted rGOS yarn (white boxes). The yarn was maximally stretched by 162.5%. (b) The strain-dependent R and (c) ΔR/R0 (variation); here, ΔR = R − R0, and R0 is the initial R (when the strain is zero). The negative value means that the R decreased as the strain increased. (d) Schematic illustration of the decrease in R due to strain. Yellow arrows are the electrically conductive paths.
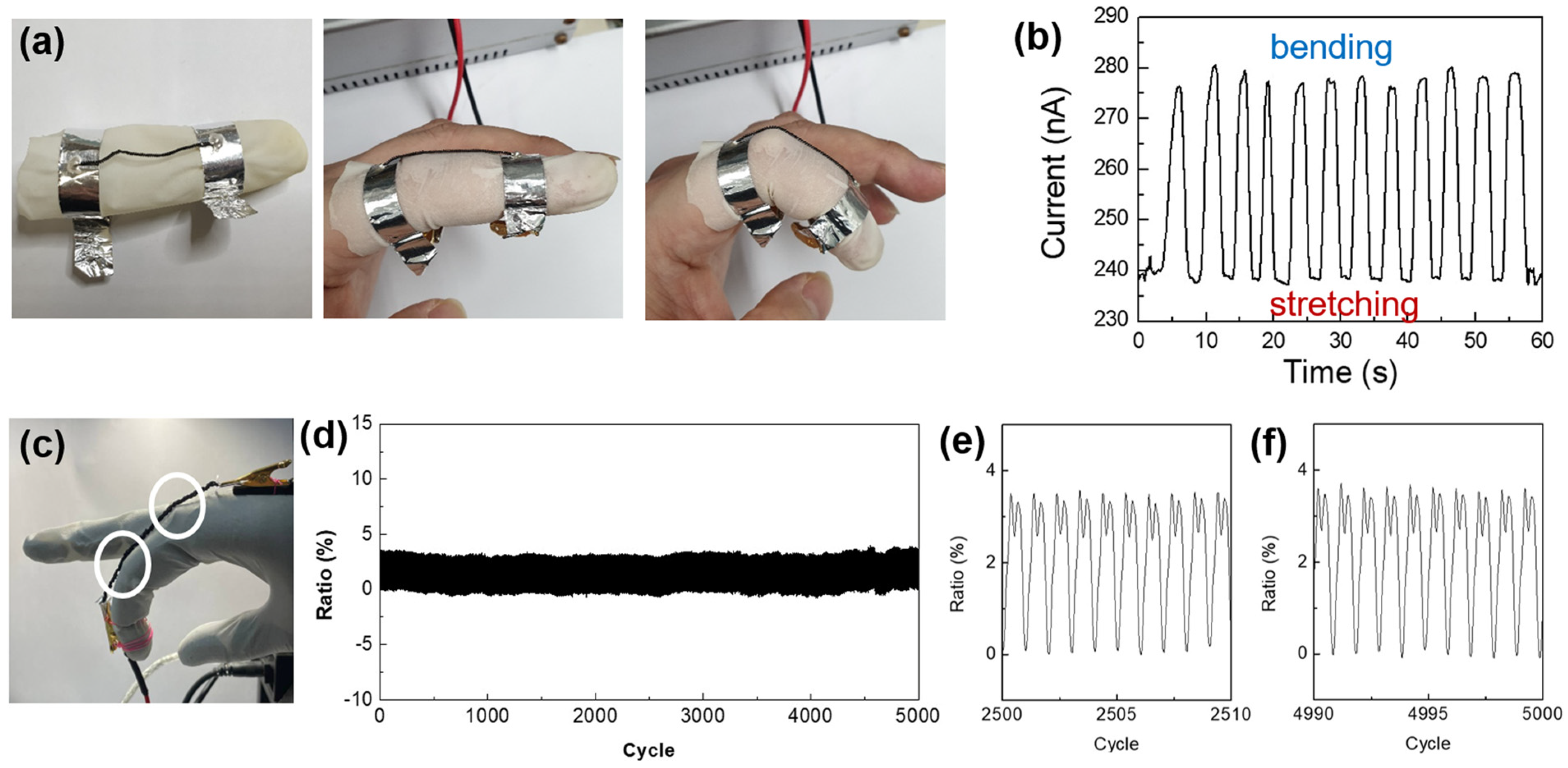
Figure 8 shows the detection of finger motion. The twisted rGOS yarn was attached to a Latex glove with Ag foil to monitor the motion of a finger (Figure 8a). The current was approximately 240 nA when the subject’s fingers were spread out. When one finger was bent about 90°, the current increased to ~280 nA. The change in the current was about 16.7% (Figure 8b). This indicates that the twisted rGOS yarns functioned as a motion sensor. To evaluate the cyclability for bending, we made a hand using 3D printing with a motor (Figure 8c and Figure S7). The variation in current (in the ratio ΔI/I0, I0 is the current corresponding to stretching, and ΔI = I − I0) for bending and stretching was stable for 5000 cycles (Figure 8d). Figure 8e,f display variations in current near 2500 cycles and 5000 cycles, respectively, indicating the good cyclability of the motion sensor even after 5000 cycles. The difference in current variation between the human finger (16.7%) and the artificial finger (~3.5%) was due to the bending degree. The human finger was bent 90°, but the artificial hand could only be bent to a maximum degree of about 45°. The double peaks during bending were caused by two finger joints, as shown in Figure 8c (white circles).
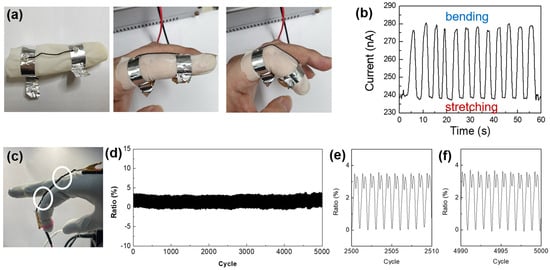
Figure 8.
(a) Test of the motion sensor using a human finger and (b) its result. The current increases as the finger bends. (c) An artificial hand fabricated using a 3D printer. (d) Cyclability of the yarn during 5000 cycles and near (e) 2500 cycles and (f) 5000 cycles.
4. Conclusions
In summary, we fabricated flexible pressure and motion sensors using GO and commercial silk fabric and yarns, respectively. The sensors were simply produced by dipping the silk into the GO solution followed by thermal treatment. The pressure sensors were created by stacking the rGOS fabrics. The sensitivity of the seven-layer pressure sensor was 2578 kPa−1. As shown in Table 1, this value is very high compared to the values exhibited by other flexible pressure sensors. The GF of the motion sensors obtained from the twisted rGOS yarns was 0.307. The motion sensors successfully detected the bending of a finger, and the response for bending and stretching was stable for up to 5000 cycles. This study provides a method of synthesizing ultrasensitive pressure and motion sensors without complicated procedures.
Supplementary Materials
The following supporting information can be downloaded at https://www.mdpi.com/article/10.3390/nano14121000/s1. Figure S1: average particle size of GO and its standard deviation; Figure S2: O1s and N1s XPS spectra; Figure S3: pressure sensor visualized with the Labview program; Figure S4: response time of the pressure sensor; Figure S5: strain-dependent diameter changes; Figure S6: SEM image of twisted rGOS yarn stretched maximally; Figure S7: homemade artificial hand.
Author Contributions
Conceptualization, K.H.L. and B.H.K.; methodology, H.-S.J. and B.H.K.; software, H.-S.J. and K.H.L.; validation, H.-S.J., K.H.L. and B.H.K.; formal analysis, H.-S.J., K.H.L. and B.H.K.; investigation, H.-S.J., K.H.L. and B.H.K.; data curation, H.-S.J., K.H.L. and B.H.K.; writing—original draft preparation, K.H.L. and B.H.K.; writing—review and editing, K.H.L. and B.H.K.; visualization, H.-S.J., K.H.L. and B.H.K.; supervision, K.H.L. and B.H.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by an Incheon National University Research Grant in 2023-0018.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The authors thank W. T. Jung and J. W. Jeon for contributing to some parts of the experiments.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Yun, Y.J.; Hong, W.G.; Kim, W.-J.; Jun, Y.; Kim, B.H. A novel method for applying reduced graphene oxide directly to electronic textiles from yarns to fabrics. Adv. Mater. 2013, 25, 5701–5705. [Google Scholar] [CrossRef]
- Jeon, J.W.; Cho, S.Y.; Jeong, Y.J.; Shin, D.S.; Kim, N.R.; Yun, Y.S.; Kim, H.-T.; Choi, S.B.; Hong, W.G.; Kim, H.J.; et al. Pyroprotein-based electronic textiles with high stability. Adv. Mater. 2017, 29, 1605479. [Google Scholar] [CrossRef]
- Jeon, J.W.; Oh, J.Y.; Cho, S.Y.; Lee, S.; Jang, H.-S.; Jung, W.T.; Kim, J.-G.; Kim, H.; Kim, H.J.; Kim, S.Y.; et al. Pyroprotein-based electronic textiles with high thermal durability. Mater. Today 2018, 21, 944–950. [Google Scholar] [CrossRef]
- Jang, H.-S.; Kim, S.; Park, I.; Jung, W.T.; Seo, J.H.; Kwon, J.-H.; Hong, W.G.; Mrówczyński, R.; Lee, H.; Choi, S.B.; et al. Long-range ordered graphitic structure in silk fibers delaminated using dopamine and thermal treatment for super-flexible electronic textiles: Possible applications for magnetic and thermoelectric textiles. Adv. Compos. Hybrid Mater. 2024, 7, 37. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, X.-L.; Yang, Y.-L.; Chen, Z.-G. Flexible thermoelectric materials and devices: From materials to applications. Mater. Today 2021, 46, 62–108. [Google Scholar] [CrossRef]
- Li, X.; Cai, K.; Gao, M.; Du, Y.; Shen, S. Recent advances in flexible thermoelectric films and devices. Nano Energy 2021, 89, 106309. [Google Scholar] [CrossRef]
- Cao, T.; Shi, X.-L.; Chen, Z.-G. Advances in the design and assembly of flexible thermoelectric device. Prog. Mater. Sci. 2023, 131, 101003. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Yang, Z.; Xu, C.; Li, X.; Huang, S.; Shi, J.; Du, J.; Han, A.; Yang, Y.; et al. Flexible solar cells based on foldable silicon wafers with blunted edges. Nature 2023, 617, 717–723. [Google Scholar] [CrossRef]
- Yeon, J.S.; Park, S.K.; Kim, S.; Jang, G.; Bae, J.; Jang, H.-S.; Kim, B.H.; Kim, Y.; Park, H.S. Self-supported VO2 on polydopamine-derived pyroprotein-based fibers for ultrastable and flexible aqueous zinc-ion batteries. Carbon Energy 2024, e469. [Google Scholar] [CrossRef]
- Ou, L.-X.; Liu, M.-Y.; Zhu, L.-Y.; Zhang, D.W.; Lu, H.-L. Recent progress on flexible room-temperature gas sensors based on metal oxide semiconductor. Nano-Micro Lett. 2022, 14, 206. [Google Scholar] [CrossRef]
- Kim, J.-H.; Mirzaei, A.; Kim, H.W.; Kim, S.S. Flexible and low power CO gas sensor with Au-functionalized 2D WS2 nanoflakes. Sens. Actuators B Chem. 2020, 313, 128040. [Google Scholar] [CrossRef]
- Jung, W.T.; Jeon, J.W.; Jang, H.-S.; Kim, D.Y.; Lee, H.-K.; Kim, B.H. Commercial silk-based electronic textiles for NO2 gas sensing. Sens. Actuators B Chem. 2020, 307, 127596. [Google Scholar]
- Chen, G.; Xiao, X.; Zhao, X.; Tat, T.; Bick, M.; Chen, J. Electronic textiles for wearable point-of-care systems. Chem. Rev. 2022, 122, 3259–3291. [Google Scholar] [CrossRef]
- Liu, X.; Miao, J.; Fan, Q.; Zhang, W.; Zuo, X.; Tian, M.; Zhu, S.; Zhang, X.; Qu, L. Recent progress on smart fiber and textile based wearable strain sensors: Materials, fabrications and applications. Adv. Fiber Mater. 2022, 4, 361–389. [Google Scholar] [CrossRef]
- Zhang, J.-W.; Zhang, Y.; Li, Y.-Y.; Wang, P. Textile-based flexible pressure sensors: A review. Polym. Rev. 2022, 62, 65–94. [Google Scholar] [CrossRef]
- Chen, J.; He, T.; Du, Z.; Lee, C. Review of textile-based wearable electronics: From the structure of the multi-level hierarchy textiles. Nano Energy 2023, 117, 108898. [Google Scholar] [CrossRef]
- Lian, Y.; Yu, H.; Wang, M.; Yang, X.; Li, Z.; Yang, F.; Wang, Y.; Tai, H.; Liao, Y.; Wu, J.; et al. A multifunctional wearable E-textile via integrated nanowire-coated fabrics. J. Mater. Chem. C 2020, 8, 8399–8409. [Google Scholar] [CrossRef]
- Lai, C.; Wu, X.; Huang, C.; Yuan, X.; Liang, H.; Wang, S.; Lin, K.; Wang, Y. Fabrication and performance of full textile-based flexible piezoresistive pressure sensor. J. Mater. Sci. Mater. Electron. 2022, 33, 4755–4763. [Google Scholar] [CrossRef]
- Lv, J.; Liu, Z.; Zhang, L.; Li, K.; Zhang, S.; Xu, H.; Mao, Z.; Zhang, H.; Chen, J.; Pan, G. Multifunctional polypyrrole and rose-like silver flower-decorated E-textile with outstanding pressure/strain sensing and energy storage performance. Chem. Eng. J. 2022, 427, 130823. [Google Scholar] [CrossRef]
- Honda, S.; Zhu, Q.; Satoh, S.; Arie, T.; Akita, S.; Takei, K. Textile-based flexible tactile force sensor sheet. Adv. Funct. Mater. 2019, 29, 1807957. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.B.; Kwon, Y.J.; Hong, J.-Y.; Jeon, Y.-P.; Lee, J.U. Fabrication of highly conductive graphene/textile hybrid electrodes via hot pressing and their application as piezoresistive pressure sensors. J. Mater. Chem. C 2022, 10, 9364–9376. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Wang, M.; Zheng, R.; Jin, Y.; Gu, Z. Flexible and strain conductive cotton yarn enabled by low-temperature sintering of silver paste with multifunctional sensing capability in human motion detection and wearable applications. Chem. Eng. J. 2023, 471, 144843. [Google Scholar] [CrossRef]
- Lim, S.J.; Bae, J.H.; Jang, S.J.; Lim, J.Y.; Ko, J.H. Development of textile-based pressure sensor and its application. Fibers Polym. 2018, 19, 2622–2630. [Google Scholar] [CrossRef]
- Lan, L.; Zhao, F.; Yao, Y.; Ping, J.; Ying, Y. One-step and spontaneous in situ growth of popcorn-like nanostructures on stretchable double-twisted fiber for ultrasensitive textile pressure sensor. ACS Appl. Mater. Interfaces 2020, 12, 10689–10696. [Google Scholar] [CrossRef]
- Alam, T.; Saidane, F.; al Faisal, A.; Khan, A.; Hossain, G. Smart-textile strain sensor for human joint monitoring. Sens. Actuators A Phys. 2022, 341, 113587. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, Y.; Sun, X.; Liang, C.; Han, Y.; Wu, X.; Wang, Z. All textile-based robust pressure sensors for smart garments. Chem. Eng. J. 2023, 454, 140302. [Google Scholar] [CrossRef]
- Zhong, W.; Ming, X.; Jiang, H.; Ke, Y.; Ding, X.; Li, M.; Jia, K.; Wang, D. Full-textile human motion detection systems integrated by facile weaving with hierarchical core-shell piezoresistive yarns. ACS Appl. Mater. Interfaces 2021, 13, 52901–52911. [Google Scholar] [CrossRef]
- Zhu, H.; Dai, S.; Cao, J.; Bai, H.; Zhong, Y.; Zhang, Z.; Cheng, G.; Yuan, N.; Ding, J. A high-performance textile pressure sensor based on carbon black/carbon nanotube-polyurethane coated fabrics with porous structure for monitoring human motion. Mater. Today Commun. 2022, 33, 104541. [Google Scholar] [CrossRef]
- Ma, J.; Qing, Y.; Song, H.; Yao, Y.; Xu, X.; Long, C.; Liu, N.; Li, H.; Liu, C. Micro-/nanofiber-coupled superhydrophobic and conductive textile for underwater wearable strain sensors with full-scale human motion detection ability. J. Mater. Chem. C 2023, 11, 9539–9551. [Google Scholar] [CrossRef]
- He, W.; Sohn, M.; Ma, R.; Kang, D.K. Flexible single-electrode triboelectric nanogenerators with MXene/PDMS composite film for biomechanical motion sensors. Nano Energy 2020, 78, 105383. [Google Scholar] [CrossRef]
- Zhen, X.; Wang, P.; Zhang, X.; Hu, Q.; Wang, Z.; Nie, W.; Zou, L.; Li, C.; Han, X. Breathable, durable and bark-shaped MXene/textiles for high-performance wearable pressure sensors, EMI shielding and heat physiotherapy. Compos. Part A 2022, 152, 106700. [Google Scholar] [CrossRef]
- Meena, J.S.; Choi, S.B.; Khanh, T.D.; Shin, H.S.; Choi, J.S.; Joo, J.; Kim, J.-W. Highly stretchable and robust textile-based capacitive mechanical sensor for human motion detection. Appl. Surf. Sci. 2023, 613, 155961. [Google Scholar] [CrossRef]
- Ma, J.; Qing, Y.; Song, H.; Cheng, X.; Li, Z.; Long, C.; Liu, C. Synergistically coupled double conductive coating-based electronic textiles with superhydrophobic and high-performance strain sensing properties for underwater human motion sensing applications. Chem. Eng. J. 2023, 471, 144284. [Google Scholar] [CrossRef]
- Yao, D.; Tang, Z.; Liang, Z.; Zhang, L.; Sun, O.-J.; Fan, J.; Zhong, G.; Liu, Q.-X.; Jiang, Y.-P.; Tang, X.-G.; et al. Adhesive, multifunctional, and wearable electronics based on MXene-coated textile for personal heating systems, electromagnetic interference shielding, and pressure sensing. J. Colloid Interf. Sci. 2023, 630, 23–33. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Gao, E.; Jian, M.; Xia, K.; Wang, Q.; Xu, Z.; Ren, T.; Zhang, Y. Carbonized silk fabric for ultrastretchable, highly sensitive, and wearable strain sensors. Adv. Mater. 2016, 28, 6640–6648. [Google Scholar] [CrossRef]
- Wu, R.; Ma, L.; Hou, C.; Meng, Z.; Guo, W.; Yu, W.; Yu, R.; Hu, F.; Liu, X.Y. Silk composite electronic textile sensor for high space precision 2D combo temperature-pressure sensing. Small 2019, 15, 1901558. [Google Scholar] [CrossRef]
- Ma, X.; Kong, Z.; Gao, Y.; Bai, Y.; Wang, W.; Tan, H.; Cai, Z.; Cai, J. Anisotropic free-standing aerogels based on graphene/silk for pressure sensing and efficient adsorption. ACS Appl. Mater. Interfaces 2023, 15, 30630–30642. [Google Scholar] [CrossRef]
- Geim, A.K.; Novoselov, K.S. The rise of graphene. Nat. Mater. 2007, 6, 183–191. [Google Scholar] [CrossRef]
- Huang, H.; Shi, H.; Das, P.; Qin, J.; Li, Y.; Wang, X.; Su, F.; Wen, P.; Li, S.; Lu, P.; et al. The chemistry and promising applications of graphene and porous graphene materials. Adv. Funct. Mater. 2020, 30, 1909035. [Google Scholar] [CrossRef]
- Li, W.; Liu, M.; Cheng, S.; Zhang, H.; Yang, W.; Yi, Z.; Zeng, Q.; Tang, B.; Ahmad, S.; Sun, T. Polarization independent tunable bandwidth absorber based on single-layer graphene. Diam. Relat. Mater. 2024, 142, 110793. [Google Scholar] [CrossRef]
- Jiang, B.; Hou, Y.; Wu, J.; Gan, X.; Zhao, J. In-fiber photoelectric device based on graphene-coated tilted fiber grating. Opto-electron. Sci. 2023, 2, 230012. [Google Scholar] [CrossRef]
- Yang, Z.; Pang, Y.; Han, X.-L.; Yang, Y.; Ling, J.; Jian, M.; Zhang, Y.; Yang, Y.; Ren, T.-L. Graphene textile strain sensor with negative resistance variation for human motion detection. ACS Nano 2018, 12, 9134–9141. [Google Scholar] [CrossRef]
- Zhai, H.; Xu, L.; Liu, Z.; Jin, L.; Yi, Y.; Zhang, J.; Fan, Y.; Cheng, D.; Li, J.; Liu, X.; et al. Twisted graphene fibre based breathable, wettable and washable anti-jamming strain sensor for underwater motion sensing. Chem. Eng. J. 2022, 439, 135502. [Google Scholar] [CrossRef]
- Zu, M.; Qi, J.; Li, F.; Zhang, Y. Highly stretchable strain sensors with reduced graphene oxide sensing liquids for wearable electronics. Nanoscale 2018, 10, 5264–5271. [Google Scholar]
- Wang, R.; Tan, Z.; Zhong, W.; Liu, K.; Li, M.; Chen, Y.; Wang, W.; Wang, D. Polypyrrole (PPy) attached on porous conductive sponge derived from carbonized graphene oxide coated polyurethane (PU) and its applications in pressure sensor. Compos. Commun. 2020, 22, 100426. [Google Scholar] [CrossRef]
- Chen, J.; Yao, B.; Li, C.; Shi, G. An improved Hummers method for eco-friendly synthesis of graphene oxide. Carbon 2013, 64, 225–229. [Google Scholar] [CrossRef]
- Rerumbilavil, S.; Sankar, P.; Rose, T.P.; Philip, R. White light Z-scan measurements of ultrafast optical nonlinearity in reduced graphene oxide nanosheets in the 400–700 nm region. Appl. Phys. Lett. 2015, 107, 051104. [Google Scholar] [CrossRef]
- Jang, H.-S.; Jung, W.T.; Chung, C.; Kim, M.; So, Y.; Song, S.; Kim, B.H. Charge transport at the interface between graphene oxide and silk in highly flexible commercial silk-based e-textile treated at high temperatures. ACS Appl. Electron. Mater. 2022, 4, 3543–3548. [Google Scholar] [CrossRef]
- Jung, W.T.; Jang, H.-S.; Jeon, J.W.; Kim, B.H. Effect of oxygen functional groups in reduced graphene oxide-coated silk electronic textiles for enhancement of NO2 gas-sensing performance. ACS Omega 2021, 6, 27080–27088. [Google Scholar] [CrossRef]
- Si, S.; Sun, C.; Qiu, J.; Liu, J.; Yang, J. Knitting integral conformal all-textile strain sensor with commercial apparel characteristics for smart textiles. Appl. Mater. Today 2022, 27, 101508. [Google Scholar] [CrossRef]
- Liu, M.; Pu, X.; Jiang, D.; Liu, T.; Huang, X.; Chen, L.; Du, C.; Sun, J.; Hu, W.; Wang, Z.L. Large-area all-textile pressure sensors for monitoring human motion and physiological signals. Adv. Mater. 2017, 29, 1703700. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).