An Approach to Using Electrical Impedance Myography Signal Sensors to Assess Morphofunctional Changes in Tissue during Muscle Contraction



Abstract
:1. Introduction
2. Materials and Methods
2.1. Aspects of Using an Electrical Impedance Signal as a Control Signal
2.2. Mechanisms of Electrical Impedance Myography Signal Formation
2.3. Field of Study
2.4. Parametric Assessment of Morphological Changes in Forearm Tissues When Performing Hand Actions Based on MRI
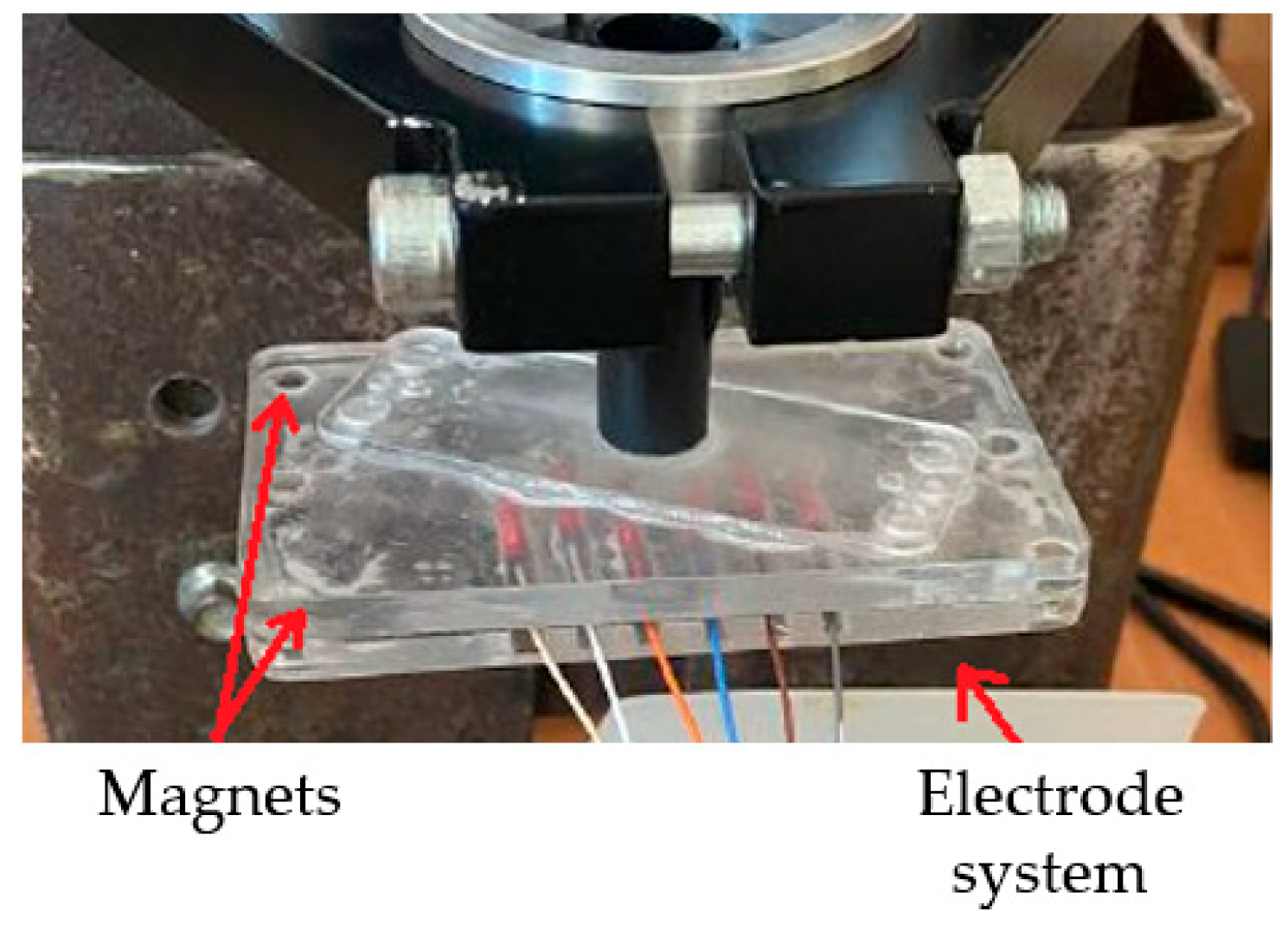
2.5. Laboratory Facilities Diagram
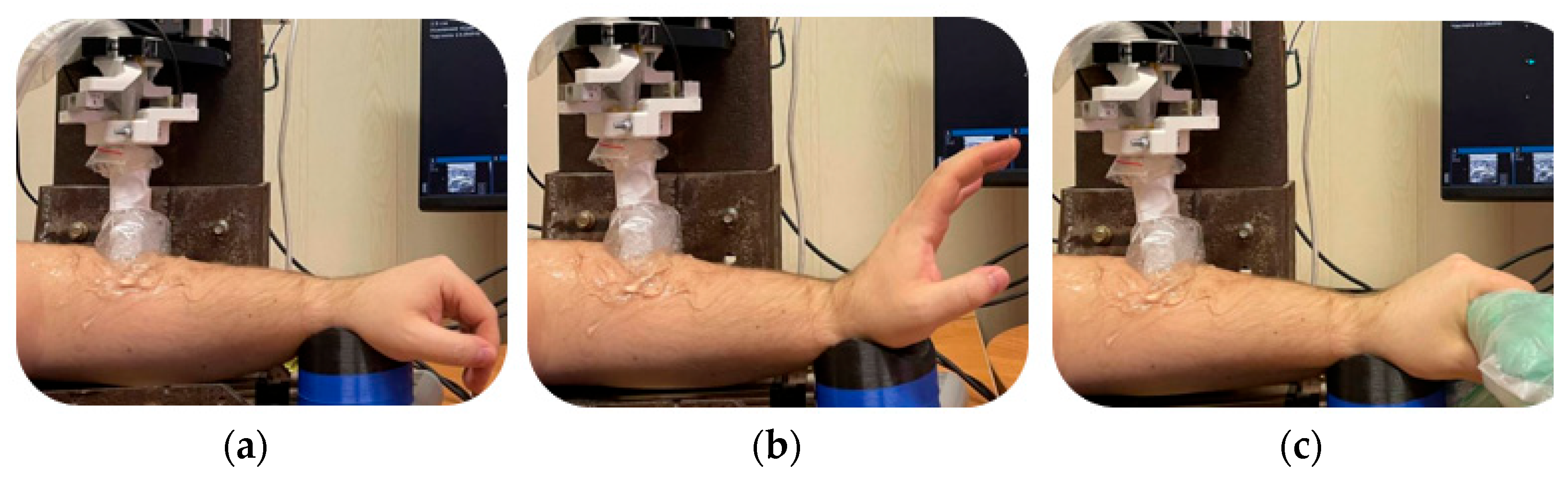
2.6. Measurement Design
3. Results and Discussion
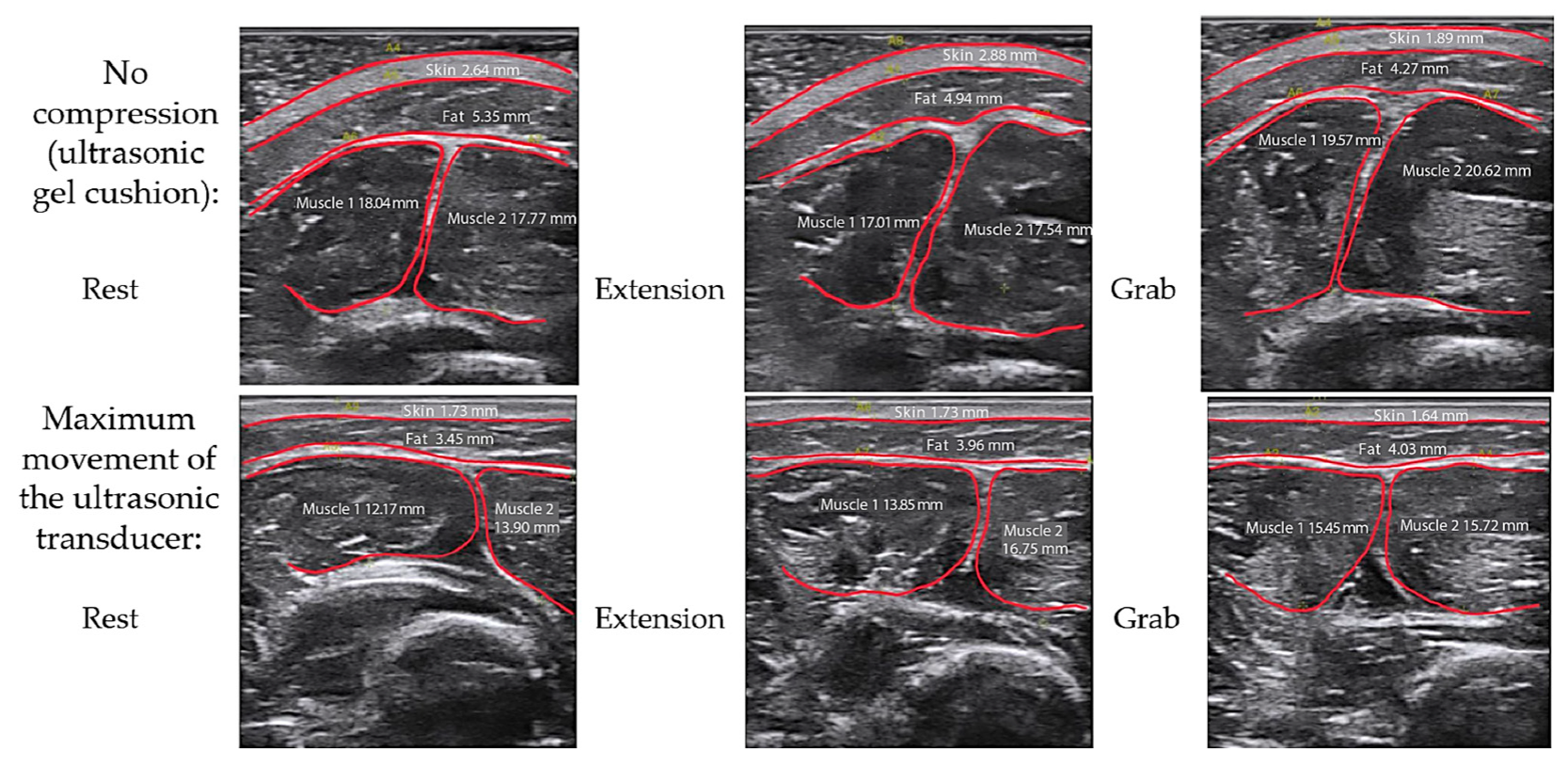
3.1. Study of Morphofunctional Activity of the Forearm Muscles When Performing Actions
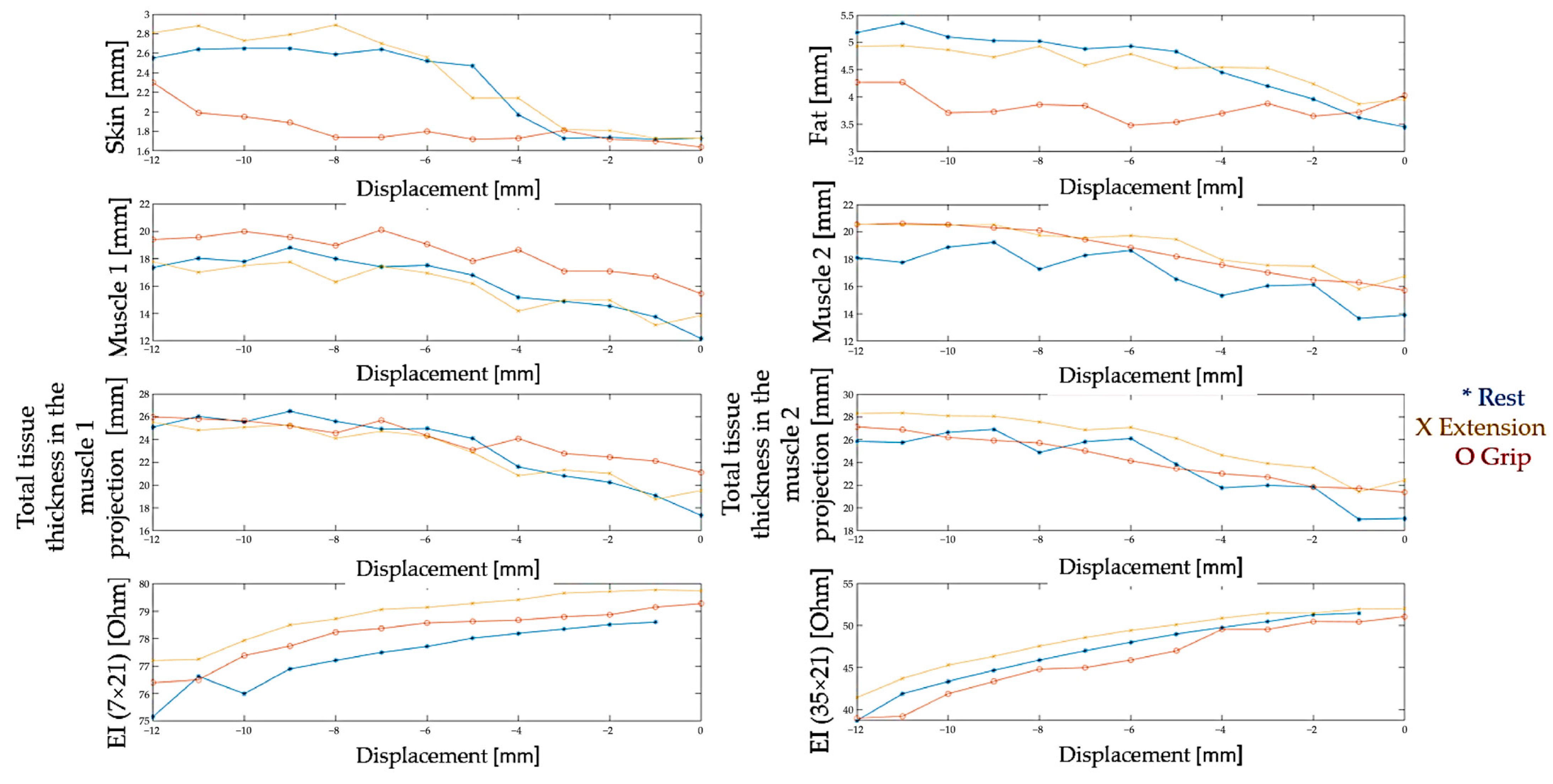
3.2. Study of the Amplitude Parameters of the Electrical Impedance Myography Signal at Different Pressures of the Electrode System
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Islam, M.R.; Spiewak, C.; Rahman, M.H.; Fareh, R. A brief review on robotic exoskeletons for upper extremity rehabilitation to find the gap between research prototype and commercial type. Adv. Robot. Autom. 2017, 6, 2. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Fei, F. The development status and trend of commercial bionic robots. In Proceedings of the 5th International Conference on Electronic Information Technology and Computer Engineering, Xi’an, China, 15–17 October 2021; pp. 1377–1381. [Google Scholar] [CrossRef]
- Marinelli, A.; Boccardo, N.; Tessari, F.; Di Domenico, D.; Caserta, G.; Canepa, M.; Semprini, M. Active upper limb prostheses: A review on current state and upcoming breakthroughs. Prog. Biomed. Eng. 2023, 5, 012001. [Google Scholar] [CrossRef]
- Pasquina, P.F.; Perry, B.N.; Miller, M.E.; Ling, G.S.; Tsao, J.W. Recent advances in bioelectric prostheses. Neurol. Clin. Pract. 2015, 5, 164–170. [Google Scholar] [CrossRef] [PubMed]
- Briko, A.; Kapravchuk, V.; Selutina, S.; Shchukin, S.; Gulyaev, Y.; Leonhardt, S. Amplitude parameters of electrical impedance myography with different pressure of the electrode system research. In Proceedings of the Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 13–14 May 2021; pp. 129–132. [Google Scholar]
- Jorge, R.N.; Tavares, J.M.R.; Barbosa, M.P.; Slade, A.P. Technology and Medical Sciences; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Rutkove, S.B. Electrical impedance myography: Background, current state, and future directions. Muscle Nerve Off. J. Am. Assoc. Electrodiagn. Med. 2009, 40, 936–946. [Google Scholar] [CrossRef] [PubMed]
- Chi, Y.M.; Jung, T.P.; Cauwenberghs, G. Dry-contact and noncontact biopotential electrodes: Methodological review. IEEE Rev. Biomed. Eng. 2010, 3, 106–119. [Google Scholar] [CrossRef] [PubMed]
- Shiffman, C.A.; Aaron, R.; Rutkove, S.B. Electrical impedance of muscle during isometric contraction. Physiol. Meas. 2003, 24, 213. [Google Scholar] [CrossRef]
- Barnes, R.; Pliquett, U.; Barthel, A. Simultaneous measurement of active potentials and bioimpedance during muscle displacement. In Proceedings of the 15th International Conference on Electrical Bio-Impedance, Heiligenstadt, Germany, 22–25 April 2013. [Google Scholar]
- Cho, Y.; Kim, P.; Kim, K.-S. Electrical impedance myography (EIM) for multi-class prosthetic robot hand control. In Proceedings of the 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 1092–1094. [Google Scholar] [CrossRef]
- Sanchez, B.; Martinsen, O.G.; Freeborn, T.J.; Furse, C.M. Electrical impedance myography: A critical review and outlook. Clin. Neurophysiol. 2021, 132, 338–344. [Google Scholar] [CrossRef]
- Grimnes, S.; Martinsen, Ø.G. Sources of error in tetrapolar impedance measurements on biomaterials and other ionic conductors. J. Phys. Appl. Phys. 2006, 40, 9. [Google Scholar] [CrossRef]
- Schwan, H.P. Electrode polarization impedance and measurements in biological materials. Ann. N. Y. Acad. Sci. 1968, 148, 191–209. [Google Scholar] [CrossRef]
- Schenck, J.F. Physical interactions of static magnetic fields with living tissues. Prog. Biophys. Mol. Biol. 2005, 87, 185–204. [Google Scholar] [CrossRef]
- Martinsen, O.G.; Grimnes, S. Bioimpedance and Bioelectricity Basics; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Rosell, J.; Colominas, J.; Riu, P.; Pallas-Areny, R.; Webster, J.G. Skin impedance from 1 Hz to 1 MHz. IEEE Trans. Biomed. Eng. 1988, 35, 649–651. [Google Scholar] [CrossRef] [PubMed]
- McEwan, A.; Cusick, G.; Holder, D.S. A review of errors in multi-frequency EIT instrumentation. Physiol. Meas. 2007, 28, S197. [Google Scholar] [CrossRef] [PubMed]
- GOST R MEC 60601-1-2010; Medical Electrical Equipment. Part 1. General Requirements for Basic Safety and Essential Performance. GOST-R: Moscow, Russia, 2010.
- Kusche, R.; Martin, R. Multi-frequency impedance myography: The PhaseX effect. IEEE Sens. J. 2020, 21, 3791–3798. [Google Scholar] [CrossRef]
- Buendia, R.; Seoane, F.; Bosaeus, I.; Gil-Pita, R.; Johannsson, G.; Ellegård, L.; Lindecrantz, K. Robustness study of the different immittance spectra and frequency ranges in bioimpedance spectroscopy analysis for assessment of total body composition. Physiol. Meas. 2014, 35, 1373. [Google Scholar] [CrossRef] [PubMed]
- Bogonez-Franco, P.; Nescolarde, L.; Bragos, R.; Rosell-Ferrer, J.; Yandiola, I. Measurement errors in multifrequency bioelectrical impedance analyzers with and without impedance electrode mismatch. Physiol. Meas. 2009, 30, 573. [Google Scholar] [CrossRef] [PubMed]
- Grisbrook, T.L.; Kenworthy, P.; Phillips, M.; Gittings, P.M.; Wood, F.M.; Edgar, D.W. Alternate electrode placement for whole body and segmental bioimpedance spectroscopy. Physiol. Meas. 2015, 36, 2189. [Google Scholar] [CrossRef]
- Žagar, T.; Krizaj, D. Electrical impedance of relaxed and contracted skeletal muscle. In Proceedings of the 13th International Conference on Electrical Bioimpedance and the 8th Conference on Electrical Impedance Tomography, Graz, Austria, 29 August–2 September 2007; pp. 711–714. [Google Scholar] [CrossRef]
- Sanchez, B.; Rutkove, S.B. Electrical impedance myography and its applications in neuromuscular disorders. Neurotherapeutics 2017, 14, 107–118. [Google Scholar] [CrossRef]
- Sakugawa, R.L.; Lucas, B.R.; Orssatto, L.T.; Sampaio, L.T.; de Brito Fontana, H.; Diefenthaeler, F. Pressure on the electrode to reduce discomfort during neuromuscular electrical stimulation in individuals with different subcutaneous-fat thickness: Is the procedure effective and reliable? IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 30, 1–7. [Google Scholar] [CrossRef]
- McClendon, J.F. The increased permeability of striated muscle to ions during contraction. Am. J. Physiol.-Leg. Content 1912, 29, 302–305. [Google Scholar] [CrossRef]
- Dubuisson, M. Recherches sur les modifications qui surviennent dans la conductibilité électrique du muscle au cours de la contraction. Arch. Int. Physiol. 1933, 37, 35–57. [Google Scholar] [CrossRef]
- Briko, A.; Kapravchuk, V.; Kobelev, A.; Tikhomirov, A.; Hammoud, A.; Al-Harosh, M.; Leonhardt, S.; Ngo, C.; Gulyaev, Y.; Shchukin, S. Determination of the Geometric Parameters of Electrode Systems for Electrical Impedance Myography: A Preliminary Study. Sensors 2022, 22, 97. [Google Scholar] [CrossRef]
- Li, L.; Xiaoyan, L.; Huijing HHenry, S.; Ping, Z. The effect of subcutaneous fat on electrical impedance myography: Electrode configuration and multi-frequency analyses. PLoS ONE 2016, 11, e0156154. [Google Scholar] [CrossRef] [PubMed]
- Sanchez, B.; Li, J.; Geisbush, T.; Bardia, R.B.; Rutkove, S.B. Impedance alterations in healthy and diseased mice during electrically induced muscle contraction. IEEE Trans. Biomed. Eng. 2014, 63, 1602–1612. [Google Scholar] [CrossRef] [PubMed]
- Briko, A.; Kapravchuk, V.; Kobelev, A.; Hammoud, A.; Leonhardt, S.; Ngo, C.; Gulyaev, Y.; Shchukin, S. A way of bionic control based on EI, EMG, and FMG signals. Sensors 2022, 22, 152. [Google Scholar] [CrossRef] [PubMed]
- Faes, T.J.C.; Van Der Meij, H.A.; De Munck, J.C.; Heethaar, R.M. The electric resistivity of human tissues (100 Hz–10 MHz): A meta-analysis of review studies. Physiol. Meas. 1999, 20, R1. [Google Scholar] [CrossRef]
- Gorokhova, N.M.; Golovin, M.A.; Chezhin, M.S. Methods for controlling upper limb prostheses. Sci. Tech. Bull. Inf. Technol. Mech. Opt. 2019, 19, 314–325. [Google Scholar]
- Hučko, B.; Uherčík, F.; Horvát, F. Improved kinematics for upper limbs prostheses. Procedia Eng. 2014, 96, 164–171. [Google Scholar] [CrossRef]
- Nakamura, Y.; Nagai, K.; Yoshikawa, T. Mechanics of coordinative manipulation by multiple robotic mechanisms. J. Robot. Soc. Jpn. 1986, 4, 489–498. [Google Scholar] [CrossRef]
- Roberts, T.J.; Eng, C.M.; Sleboda, D.A.; Holt, N.C.; Brainerd, E.L.; Stover, K.K.; Marsh, R.L.; Azizi, E. The multi-scale, three-dimensional nature of skeletal muscle contraction. Physiology 2019, 34, 402–408. [Google Scholar] [CrossRef]
- Macgregor, L.J.; Hunter, A.M.; Orizio, C.; Fairweather, M.M.; Ditroilo, M. Assessment of skeletal muscle contractile properties by radial displacement: The case for tensiomyography. Sports Med. 2018, 48, 1607–1620. [Google Scholar] [CrossRef] [PubMed]
- Kobelev, A.; Goidina, T.; Shchukin, S.; Gulyaev, Y.; Luzhnov, P.; Leonhardt, S. Stand for determining the forearm tissues resistivity in-vivo. In Proceedings of the 2021 Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (US-BEREIT), Yekaterinburg, Russia, 13–14 May 2021; pp. 86–89. [Google Scholar]
- Brankov, G. Fundamentals of Biomechanics; Translated from Bulgarian by V. Dzhupanova; Knets, I.V., Ed.; Mir Publishing House: Moscow, Russia, 1981; p. 254. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Result |
|---|---|
| Electrical impedance channel (EI) | |
| Number of measuring channels | 2 |
| Number of current channels | 1 |
| Permissible load on the current source, not less | 5 kOhm |
| Probing current frequency | 75 kHz |
| Signal frequency range | 0–40 Hz |
| Measuring range | 1–300 Ohm |
| Measurement sensitivity | 10 mOhm |
| Motion testing facility | |
| Motion control unit | |
| Working stroke | 89 mm |
| Maximum displacement speed | 1200 rpm |
| Load capacity | 3 kg |
| Maximum displacement error | 1 µm |
| Pressure control unit | |
| Sensitivity | 0.01 daN |
| Signal frequency range | 0–40 Hz |
| Maximum pressing force | 10 daN |
| Ultrasonic device | |
| Ultrasonic sensor type | Linear |
| Probing frequency | 13 MHz |
| Probing depth | At least 3.9 cm |
| Amplification | 42 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapravchuk, V.; Briko, A.; Kobelev, A.; Hammoud, A.; Shchukin, S. An Approach to Using Electrical Impedance Myography Signal Sensors to Assess Morphofunctional Changes in Tissue during Muscle Contraction. Biosensors 2024, 14, 76. https://doi.org/10.3390/bios14020076
Kapravchuk V, Briko A, Kobelev A, Hammoud A, Shchukin S. An Approach to Using Electrical Impedance Myography Signal Sensors to Assess Morphofunctional Changes in Tissue during Muscle Contraction. Biosensors. 2024; 14(2):76. https://doi.org/10.3390/bios14020076
Chicago/Turabian StyleKapravchuk, Vladislava, Andrey Briko, Alexander Kobelev, Ahmad Hammoud, and Sergey Shchukin. 2024. "An Approach to Using Electrical Impedance Myography Signal Sensors to Assess Morphofunctional Changes in Tissue during Muscle Contraction" Biosensors 14, no. 2: 76. https://doi.org/10.3390/bios14020076
APA StyleKapravchuk, V., Briko, A., Kobelev, A., Hammoud, A., & Shchukin, S. (2024). An Approach to Using Electrical Impedance Myography Signal Sensors to Assess Morphofunctional Changes in Tissue during Muscle Contraction. Biosensors, 14(2), 76. https://doi.org/10.3390/bios14020076