
Exploring the Role of Autonomous Trucks in Addressing Challenges within the Trucking Industry: A Comprehensive Review



Abstract
1. Introduction
2. Review Methodology and Overview on Papers
2.1. Search Strategy
2.2. Autonomy Level
- Level 0: This level offers warnings and momentary assistance, such as automatic emergency braking, blind spot warning, and lane departure warning.
- Level 1: This level provides either steering OR brake/acceleration support, such as lane centering or adaptive cruise control.
- Level 2: This level provides both steering AND brake/acceleration support, such as lane centering and adaptive cruise control.
- Level 3: This level involves driving the vehicle under limited conditions. The system will not operate unless all required conditions are met, similar to a traffic jam chauffeur. Note that at this level, if the system requests, manual driving is required.
- Level 4: This level is akin to level 3, but it will not request manual driving. An example would be a local driverless taxi.
- Level 5: This level is similar to level 4 but can be utilized in all circumstances.
2.3. Overview of Papers
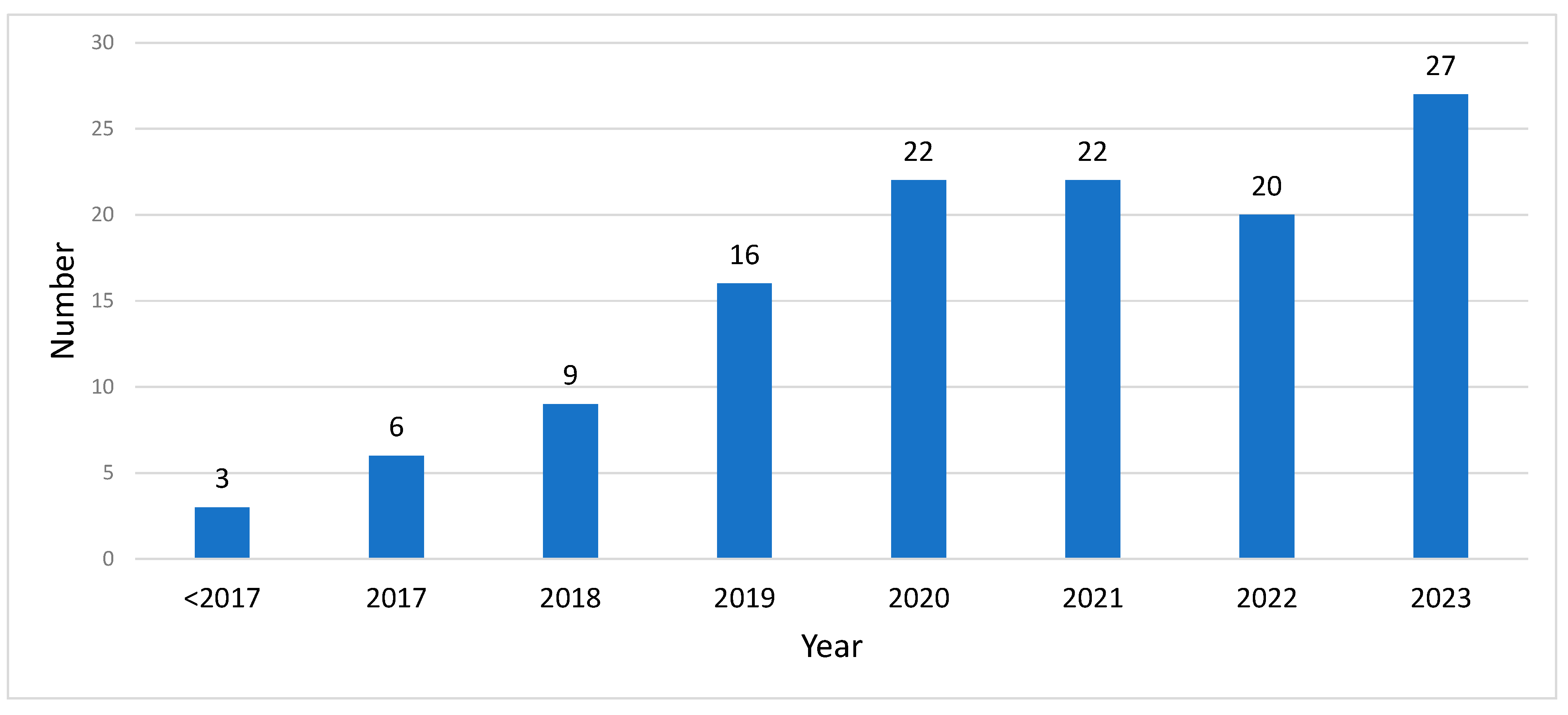
2.3.1. Distribution of Papers per Publishing Year and Type
2.3.2. Distribution of Papers per Publisher/Journal/Conference
2.4. Literature Limitations
3. Thematic Categorization in the Literature Review
3.1. Thematic Categorization
- Studies addressing challenges and considerations related to the emergence of autonomous trucks and foundational issues, which are labeled as foundational aspects of autonomous truck implementation.
- Studies addressing issues and opportunities that arise following the emergence of autonomous trucks, with a focus on improving implementation quality. This falls under the category of practical implementation and economic analysis of autonomous trucks.
3.1.1. Foundational Aspects of Autonomous Truck Implementation
- Core Technologies: This subdivision focuses on the enhancement of technology and design aspects of autonomous trucks. In the initial stages of autonomous truck adoption, there is a pronounced necessity for technological advancements. Initially, the priority must be on developing and implementing feasible innovations rather than on societal impacts. However, as the deployment and testing of autonomous truck prototypes advance, a transition from a focus on technological development to community engagement is anticipated. This comprehensive literature review categorizes the research on autonomous trucks into three primary subcategories: truck maneuvering, environmental recognition, and connectivity. These categories will be meticulously examined in the subsequent sections. A thorough analysis of the data presented in Figure 3 underscores that truck maneuvering is the most emphasized core technology in the foundational aspects of autonomous truck implementation. Specifically, 25 out of 42 reviewed studies concentrated on the development of algorithms aimed at achieving smoother and more optimized maneuvers under diverse conditions. Detailed recommendations regarding these subcategories will be provided in the ensuing sections.
- Community Engagement: This subdivision aims to gather insights from the target community, which includes drivers, company owners, and policymakers. Changes in transportation significantly impact the supply chain. While some studies in the reviewed literature have devoted efforts to examining this facet, only 25 out of 67 articles on foundational aspects addressed these effects. In total, only 20% of the studies have focused on analyzing impacts, barriers, and adoption rates. As has been previously established, policymaking is as crucial as the technical aspects of new technology. Therefore, it is imperative to suggest more investigations into community engagement within foundational aspects. In this study, only 25 research papers could be classified under community engagement, with three categories created to differentiate them. However, critical gaps in the literature remain evident. Notably, there is a significant lack of research focused on policymaking to facilitate the implementation of this new technology. Although this gap can be considered a practical implementation issue, its foundational aspect is discussed here. The introduction of autonomous trucks is expected to cause substantial disruptions in the foundational aspects of the supply chain, raising serious questions.
Acceptance Survey
Legal, Social, and Operational Barriers
Core Technologies for Autonomous Truck Implementation
- Truck maneuvering
- 2.
- Environment recognizing
- 3.
- Connecting
Adoption Rate Prediction
3.1.2. Practical Implementation and Economic Analysis of Autonomous Trucks
Infrastructure
Systemic Performance Optimization
- Planning
- 2.
- Platooning
- Focused on performance
- b.
- Focused on pavement
- 3.
- Others
Cost Estimation
3.2. Research Method Categorization
3.2.1. Autonomous Technology Description
Autonomous
Connected
Assisted
3.2.2. Data Collecting Method
Existing Data
Simulation
Questionnaire
Real World Test
3.2.3. Research Environment Limitation
3.2.4. Fuel Type of Autonomous Trucks
3.2.5. Approach to Analysis: Simultaneous or Separate
4. Conclusions and Insights
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
| 1 | Gross Domestic Product. |
| 2 | https://www.fmcsa.dot.gov/ (accessed on 29 February 2024). |
| 3 | https://scholar.google.com/ (accessed on 9 October 2023). |
| 4 | https://ieeexplore.ieee.org/Xplore/home.jsp, i.e., ee.org/Xplore/home.jsp (accessed on 20 October 2023). |
| 5 | https://www.mdpi.com/ (accessed on 22 October 2023). |
| 6 | https://trid.trb.org/ (accessed on 4 April 2024). |
References
- Mačiulis, A.; Vasiliauskas, A.V.; Jakubauskas, G. The Impact of Transport on the Competitiveness of National Economy. Transport 2009, 24, 93–99. [Google Scholar] [CrossRef]
- Kazemeini, A.; Kermanshah, A. Promoting Sustainable Transport in Developing Countries: A Case Study of University Students in Tehran. Future Transp. 2023, 3, 858–877. [Google Scholar] [CrossRef]
- Kermanshah, A.; Derrible, S. Robustness of Road Systems to Extreme Flooding: Using Elements of GIS, Travel Demand, and Network Science. Nat. Hazards 2017, 86, 151–164. [Google Scholar] [CrossRef]
- Wisetjindawat, W.; Derrible, S.; Kermanshah, A. Modeling the Effectiveness of Infrastructure and Travel Demand Management Measures to Improve Traffic Congestion during Typhoons. Transp. Res. Rec. 2018, 2672, 43–53. [Google Scholar] [CrossRef]
- Kermanshah, A.; Baroud, H.; Abkowitz, M. Cyber-Physical Technologies in Freight Operations and Sustainability: A Case Study of Smart GPS Technology in Trucking. Sustain. Cities Soc. 2020, 55, 102017. [Google Scholar] [CrossRef]
- Freight Transport Statistics—Modal Split. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Freight_transport_statistics_-_modal_split (accessed on 1 January 2024).
- U.S. Freight Movement Mode Share by Tonnage 2020. Available online: https://www.statista.com/statistics/184595/us-freight-movement-mode-share-by-tonnage/ (accessed on 1 January 2024).
- Freight Trucking Market Size & Forecast Analysis [2023–2030]; Fortune Business Insights: Pune, India, 2022; p. 162.
- IRU. Truck Driver Shortage; IRU: Geneva, Switzerland, 2023. [Google Scholar]
- Renewable Energy Statistics; IRENA: Masdar City, United Arab Emirates, 2018; p. 362.
- IEA Study Unveils Key Role for Trucks in Global Oil-Demand Growth—News. Available online: https://www.iea.org/news/iea-study-unveils-key-role-for-trucks-in-global-oil-demand-growth (accessed on 26 February 2024).
- The Truck Driver Shortage in the US Continues. Available online: https://www.ajot.com/news/the-truck-driver-shortage-in-the-us-continues (accessed on 22 January 2024).
- Placek, M. U.S. Truck Driver Shortage 2011–2030. Available online: https://www.statista.com/statistics/1287929/truck-driver-shortage-united-states/ (accessed on 22 January 2024).
- ALANA SEMUELS The Trucking Bubble Has Burst. Available online: https://time.com/6313178/trucking-bubble-has-burst/ (accessed on 22 January 2024).
- ALANA SEMUELS The Great American Trucker Shortage Isn’t Real. Available online: https://time.com/6116853/truck-driver-shortage-supply-chain/ (accessed on 22 January 2024).
- Global Energy Crisis—Topics. Available online: https://www.iea.org/topics/global-energy-crisis (accessed on 30 January 2024).
- Kyle Fretwell Truck Accident Statistics—2023 Edition. Available online: https://www.truckinfo.net/research/truck-accident-statistics (accessed on 30 January 2024).
- Laing, K. Can a Self-Driving 40-Ton Truck Resolve Some Supply Chain Issues? Developers Say Yes. The Economic Times, 9 January 2022. Available online: https://economictimes.indiatimes.com/small-biz/security-tech/technology/can-a-self-driving-40-ton-truck-resolve-some-supply-chain-issues-developers-say-yes/articleshow/88801173.cms?from=mdr (accessed on 20 August 2024).
- Shladover, S.E. Connected and Automated Vehicle Systems: Introduction and Overview. J. Intell. Transp. Syst. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- Engholm, A.; Pernestål, A.; Kristoffersson, I. Cost Analysis of Driverless Truck Operations. Transp. Res. Rec. 2020, 2674, 511–524. [Google Scholar] [CrossRef]
- Paul, A. Eisenstein Millions of Jobs Are on the Line When Autonomous Cars Take Over. Available online: https://www.nbcnews.com/business/autos/millions-professional-drivers-will-be-replaced-self-driving-vehicles-n817356 (accessed on 23 January 2024).
- Roberts, J. Kodiak: Autonomous Trucks Nearly Ready for Real World. Available online: https://www.truckinginfo.com/10214080/kodiak-autonomous-trucks-nearly-ready-for-real-world-fleet-deployment (accessed on 23 January 2024).
- Rahman, M.M.; Thill, J.-C. Impacts of Connected and Autonomous Vehicles on Urban Transportation and Environment: A Comprehensive Review. Sustain. Cities Soc. 2023, 96, 104649. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Connected and Autonomous Vehicles and Infrastructures: A Literature Review. Int. J. Pavement Res. Technol. 2023, 16, 264–284. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Shared Autonomous Vehicle Services: A Comprehensive Review. Transp. Res. Part C Emerg. Technol. 2020, 111, 255–293. [Google Scholar] [CrossRef]
- Azad, M.; Hoseinzadeh, N.; Brakewood, C.; Cherry, C.R.; Han, L.D. Fully Autonomous Buses: A Literature Review and Future Research Directions. J. Adv. Transp. 2019, 2019, e4603548. [Google Scholar] [CrossRef]
- Sankar Raman, S.; Duffy, V.G. A Systematic Review of Autonomous Taxi Service and Discussion on Its Design. In Proceedings of the HCI International 2021—Late Breaking Papers: HCI Applications in Health, Transport, and Industry; Stephanidis, C., Duffy, V.G., Krömker, H., Fui-Hoon Nah, F., Siau, K., Salvendy, G., Wei, J., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 332–344. [Google Scholar]
- Pudasaini, B.; Shahandashti, S.M. A Review on Impacts of Autonomous Trucking on Freight Transportation Infrastructure. In Proceedings of the International Conference on Transportation and Development 2021, American Society of Civil Engineers, Virtual Conference, Virtual Event, 4 June 2021; pp. 391–401. [Google Scholar]
- Rahimi, A.; He, Y. A Review of Essential Technologies for Autonomous and Semi-Autonomous Articulated Heavy Vehicles. In Proceedings of the Canadian Society for Mechanical Engineering International Congress, Charlottetown, PE, Canada, 21–24 June 2020; pp. 21–24. [Google Scholar]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel Economy in Truck Platooning: A Literature Overview and Directions for Future Research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2021. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 24 August 2023).
- Collingwood, L. Autonomous Trucks: An Affront to Masculinity? Inf. Commun. Technol. Law 2018, 27, 251–265. [Google Scholar] [CrossRef]
- Anderhofstadt, B.; Spinler, S. Preferences for Autonomous and Alternative Fuel-Powered Heavy-Duty Trucks in Germany. Transp. Res. Part Transp. Environ. 2020, 79, 102232. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B.; Li, W.; Qin, R. Simulation Study of Passing Drivers’ Responses to the Autonomous Truck-Mounted Attenuator System in Road Maintenance. Transp. Res. Rec. 2023, 2677, 17–32. [Google Scholar] [CrossRef]
- Trösterer, S.; Meneweger, T.; Meschtscherjakov, A.; Tscheligi, M. Transport Companies, Truck Drivers, and the Notion of Semi-Autonomous Trucks: A Contextual Examination. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct; Association for Computing Machinery, New York, NY, USA, 24 September 2017; pp. 201–205. [Google Scholar]
- Talebian, A.; Mishra, S. Unfolding the State of the Adoption of Connected Autonomous Trucks by the Commercial Fleet Owner Industry. Transp. Res. Part E Logist. Transp. Rev. 2022, 158, 102616. [Google Scholar] [CrossRef]
- Müller, S.; Voigtländer, F. Automated Trucks in Road Freight Logistics: The User Perspective. In Proceedings of the Advances in Production, Logistics and Traffic; Clausen, U., Langkau, S., Kreuz, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 102–115. [Google Scholar]
- Elgharbawy, M.; Scherhaufer, I.; Oberhollenzer, K.; Frey, M.; Gauterin, F. Adaptive Functional Testing for Autonomous Trucks. Int. J. Transp. Sci. Technol. 2018, 8, 202–218. [Google Scholar] [CrossRef]
- Chottani, A.; Hastings, G.; Murnane, J.; Neuhaus, F. Distraction or Disruption? Autonomous Trucks Gain Ground in US Logistics; McKinsey & Company: Chicago, IL, USA, 2018. [Google Scholar]
- Viscelli, S. Driverless? Autonomous Trucks and the Future of the American Trucker; Center for Labor Research and Education, University of California, Berkeley, and Working Partnerships USA. September 2018. Available online: https://laborcenter.berkeley.edu/driverless/ (accessed on 20 August 2024).
- Gölbaşı, O.; Dagdelen, K. Equipment Replacement Analysis of Manual Trucks with Autonomous Truck Technology in Open Pit Mines. In Proceedings of the Application of Computers and Operations Research in the Mineral Industry, Golden, CO, USA, 9 August 2017. [Google Scholar]
- Tian, C.; Xiao, J.; Chen, Y.; Feng, Y.; Zhang, J. Implementation, Benefits, and Challenges of Autonomous Truck-Mounted Attenuator. 2022; pp. 120–128. Available online: https://ascelibrary.org/doi/10.1061/9780784484333.011 (accessed on 20 August 2024).
- Hu, X.; Tang, Q. Modeling and Development of Operation Guidelines for Leader-Follower Autonomous Truck-Mounted Attenuator Vehicles. arXiv 2021, arXiv:2104.06507. [Google Scholar] [CrossRef]
- Gnap, J.; Říha, Z.; Semanova, S. Proposal of Methodology to Calculate Necessary Number of Autonomous Trucks for Trolleys and Efficiency Evaluation. Open Eng. 2020, 10, 255–264. [Google Scholar] [CrossRef]
- Kassai, E.T.; Azmat, M.; Kummer, S. Scope of Using Autonomous Trucks and Lorries for Parcel Deliveries in Urban Settings. Logistics 2020, 4, 17. [Google Scholar] [CrossRef]
- Kim, E.; Kim, Y.; Park, J. The Necessity of Introducing Autonomous Trucks in Logistics 4.0. Sustainability 2022, 14, 3978. [Google Scholar] [CrossRef]
- Sternberg, H.S.; Chen, H.; Hofmann, E.; Prockl, G. Autonomous Trucks: A Supply Chain Adoption Perspective. In Proceedings of the 53rd Hawaii International Conference on System Sciences, Maui, HI, USA, 7–10 January 2020; Hawaii International Conference on System Sciences (HICSS). 2020; pp. 4534–4539. [Google Scholar]
- Mondy. An Empirical Analysis of Factors Affecting Autonomous Truck Adoption; University of Missouri: Saint Louis, MI, USA, 2021. [Google Scholar]
- Engholm, A. Driverless Trucks in the Swedish Freight Transport System: An Analysis of Future Impacts on the Transport System and the Emerging Innovation System; Licentiate, Kth Royal Institute of Technology: Stockholm, Sweden, 2021. [Google Scholar]
- Rigatos, G.; Siano, P.; Wira, P.; Busawon, K.; Binns, R. A Nonlinear H-Infinity Control Approach for Autonomous Truck and Trailer Systems. Unmanned Syst. 2020, 08, 49–69. [Google Scholar] [CrossRef]
- Manav, A.C.; Lazoglu, I. A Novel Cascade Path Planning Algorithm for Autonomous Truck-Trailer Parking. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6821–6835. [Google Scholar] [CrossRef]
- Kolb, J.K.; Nitzsche, G.; Wagner, S. A Simple yet Efficient Path Tracking Controller for Autonomous Trucks⁎⁎This Work Is Funded by the Federal Ministry for Economic Affairs and Energy Germany. IFAC-Pap. 2019, 52, 307–312. [Google Scholar] [CrossRef]
- Zhang, F.; Xia, R.; Chen, X. An Optimal Trajectory Planning Algorithm for Autonomous Trucks: Architecture, Algorithm, and Experiment. Sage Publ. 2020, 17, 1729881420909603. [Google Scholar] [CrossRef]
- Fadillah Rukmana, M.A.; Widyotriatmo, A.; Siregar, P.I. Anti-Jackknife Autonomous Truck Trailer for Path Following Control Using Genetic Algorithm. In Proceedings of the 2021 International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 25–28 August 2021; pp. 186–191. [Google Scholar]
- Kim, S.; Jang, M.; La, H.; Oh, K. Development of a Particle Filter-Based Path Tracking Algorithm of Autonomous Trucks with a Single Steering and Driving Module Using a Monocular Camera. Sensors 2023, 23, 3650. [Google Scholar] [CrossRef] [PubMed]
- Pachêco Gomes, I.; Renan Bruno, D.; Santos Osório, F.; Fernando Wolf, D. Diagnostic Analysis for an Autonomous Truck Using Multiple Attribute Decision Making. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), Joao Pessoa, Brazil, 6–10 November 2018; pp. 283–290. [Google Scholar]
- Lima, P.F.; Trincavelli, M.; Nilsson, M.; Mårtensson, J.; Wahlberg, B. Experimental Evaluation of Economic Model Predictive Control for an Autonomous Truck. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 710–715. [Google Scholar]
- Cirillo, M. From Videogames to Autonomous Trucks: A New Algorithm for Lattice-Based Motion Planning. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 148–153. [Google Scholar]
- Kusumakar, R.; Buning, L.; Rieck, F.; Schuur, P.; Tillema, F. INTRALOG—Intelligent Autonomous Truck Applications in Logistics; Single and Double Articulated Autonomous Rearward Docking on DCs. IET Intell. Transp. Syst. 2018, 12, 1045–1052. [Google Scholar] [CrossRef]
- Widyotriatmo, A.; Siregar, P.I.; Nazaruddin, Y.Y. Line Following Control of an Autonomous Truck-Trailer. In Proceedings of the 2017 International Conference on Robotics, Biomimetics, and Intelligent Computational Systems (Robionetics), Bali, Indonesia, 23–25 August 2017; pp. 24–28. [Google Scholar]
- Shi, Y.; Chen, Y.; Jia, B. Local Trajectory Planning for Autonomous Trucks in Collision Avoidance Maneuvers with Rollover Prevention. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PE, USA, 10–12 July 2019; pp. 3981–3986. [Google Scholar]
- Bos, M.; Vandewal, B.; Decré, W.; Swevers, J. MPC-Based Motion Planning for Autonomous Truck-Trailer Maneuvering. IFAC-Pap. 2023, 56, 4877–4882. [Google Scholar] [CrossRef]
- Lima, P.F.; Nilsson, M.; Trincavelli, M.; Mårtensson, J.; Wahlberg, B. Spatial Model Predictive Control for Smooth and Accurate Steering of an Autonomous Truck. IEEE Trans. Intell. Veh. 2017, 2, 238–250. [Google Scholar] [CrossRef]
- Al Jawahiri, A. Spline-Based Trajectory Generation for Autonomous Truck-Trailer Vehicles in Low Speed Highway Scenarios. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Xiong, X.; Tian, B.; Zhang, R.; Sun, Y.; Chen, L. Terrain-Adaptive Longitudinal Control for Autonomous Trucks. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 4375–4380. [Google Scholar]
- Shi, Y.; Huang, Y.; Chen, Y. Trajectory Planning of Autonomous Trucks for Collision Avoidance With Rollover Prevention. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8930–8939. [Google Scholar] [CrossRef]
- Ye, T.; Liu, D.; Wei, J.; Lin, Y. A Novel Approach for Obstacle Avoidance Maneuverer Controls to a 49ton Autonomous Drive Heavy-Duty Truck in GCV. In Proceedings of the 2023 IEEE 3rd International Conference on Power, Electronics and Computer Applications (ICPECA), Shenyang, China, 29–31 January 2023; pp. 902–906. [Google Scholar]
- Tsai, C.-Y.; Sung, C.-K. Algebraic General Trajectory Formula for Semitrailer Truck Vehicles. IEEE Trans. Autom. Sci. Eng. 2021, 18, 2156–2165. [Google Scholar] [CrossRef]
- Hilmi, M.; Widyotriatmo, A. Anti-Jackknife Control for Forward Motion Path Following of a Truck Trailer. In Proceedings of the 2023 8th International Conference on Instrumentation, Control, and Automation (ICA), Jakarta, Indonesia, 9–11 August 2023; pp. 114–119. [Google Scholar]
- Ardhi, R.; Febsya, M.R.; Widyotriatmo, A.; Nazaruddin, Y.Y. Backward Motion Path Following Control of Autonomous Truck-Trailer: Lyapunov Stability Approach. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 900–905. [Google Scholar]
- Febsya, M.R.; Ardhi, R.; Widyotriatmo, A.; Nazaruddin, Y.Y. Design Control of Forward Motion of an Autonomous Truck-Trailer Using Lyapunov Stability Approach. In Proceedings of the 2019 6th International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 31 July 2019; pp. 65–70. [Google Scholar]
- Hahn, R. New Exterior Design Options for Improving the Efficiency of Fully Autonomous Heavy Duty Vehicles. In Proceedings of the 2022 Second International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Virtual, 23–25 November 2022; pp. 1–5. [Google Scholar]
- Wang, F.; Zhang, Z. Route Control and Behavior Decision of Intelligent Driverless Truck Based on Artificial Intelligence Technology. Wirel. Commun. Mob. Comput. 2022, 2022, e7025081. [Google Scholar] [CrossRef]
- Asrofudin, B.; Widyotriatmo, A.; Siregar, P.I.; Apeco Putra, D. Sigmoid Function Optimization for Path Following Control with Obstacle Avoidance of an Autonomous Truck-Trailer. In Proceedings of the 2021 International Conference on Instrumentation, Control, and Automation (ICA), Bandung, Indonesia, 25–28 August 2021; pp. 180–185. [Google Scholar]
- Song, T.; Lee, H.; Oh, K. A Model Predictive Tracking Control Algorithm of Autonomous Truck Based on Object State Estimation Using Extended Kalman Filter. J. Drive Control 2019, 16, 22–29. [Google Scholar] [CrossRef]
- Ruan, S.; Li, S.; Lu, C.; Gu, Q. A Real-Time Negative Obstacle Detection Method for Autonomous Trucks in Open-Pit Mines. Sustainability 2023, 15, 120. [Google Scholar] [CrossRef]
- Meng, D.; Tian, B.; Pan, Z.; Cao, D.; Chen, L. Berm Detection for Autonomous Truck in Surface Mine Dump Area. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–21 September 2021; pp. 2829–2834. [Google Scholar]
- Lu, X.; Ai, Y.; Tian, B. Real-Time Mine Road Boundary Detection and Tracking for Autonomous Truck. Sensors 2020, 20, 1121. [Google Scholar] [CrossRef]
- Tang, J.; Lu, X.; Ai, Y.; Tian, B.; Chen, L. Road Detection for Autonomous Truck in Mine Environment. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 839–845. [Google Scholar]
- Vinh, N.Q.; Kim, H.-S.; Long, L.N.B.; You, S.-S. Robust Lane Detection Algorithm for Autonomous Trucks in Container Terminals. J. Mar. Sci. Eng. 2023, 11, 731. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, T.; Wang, H.; Wu, S.; Shao, Z. Stability Analysis of a Vehicle–Cargo Securing System for Autonomous Trucks Based on 6-SPS-Type Parallel Mechanisms. Machines 2023, 11, 745. [Google Scholar] [CrossRef]
- DiPalma, C.; Wang, N.; Sato, T.; Chen, Q.A. Demo: Security of Camera-Based Perception for Autonomous Driving under Adversarial Attack. In Proceedings of the 2021 IEEE Security and Privacy Workshops (SPW), Francisco, CA, USA, 27 May 2021; p. 243. [Google Scholar]
- Rzydzik, S.; Saltarski, A.; Roziński, M.; Psiuk, K. Infrared Distance Sensors for Autonomous Model of Truck with Semi-Trailer. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering (ICMRE), Barcelona, Spain, 12–15 February 2020; pp. 104–109. [Google Scholar]
- Wang, M.; Zhou, A.; Chen, X.; Shen, Y.; Li, Z. A Novel Asynchronous UWB Positioning System for Autonomous Trucks in an Automated Container Terminal. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 3413–3422. [Google Scholar] [CrossRef]
- Li, W.; Meese, C.; Guo, H.; Nejad, M. Aggregated Zero-Knowledge Proof and Blockchain-Empowered Authentication for Autonomous Truck Platooning. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9309–9323. [Google Scholar] [CrossRef]
- Sari, T.; Sever, M.; Candan, A.T.; Girgin, G.T.Ç.; Girgin, E.; Haklıdır, M. Cloud Assisted Connected and Automated Mobility System Architecture Design and Experimental Verification: The 5G-MOBIX Autonomous Truck Routing Use Case. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022; pp. 1374–1380. [Google Scholar]
- Li, W.; Meese, C.; Zhong, Z.G.; Guo, H.; Nejad, M. Location-Aware Verification for Autonomous Truck Platooning Based on Blockchain and Zero-Knowledge Proof. In Proceedings of the 2021 IEEE International Conference on Blockchain and Cryptocurrency (ICBC), Sydney, Australia, 3–6 May 2021; pp. 1–5. [Google Scholar]
- Xing, R.; Su, Z.; Xu, Q.; Zhang, N.; Luan, T.H. Secure Content Delivery for Connected and Autonomous Trucks: A Coalition Formation Game Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20522–20537. [Google Scholar] [CrossRef]
- Balador, A.; Bazzi, A.; Hernandez-Jayo, U.; de la Iglesia, I.; Ahmadvand, H. A Survey on Vehicular Communication for Cooperative Truck Platooning Application. Veh. Commun. 2022, 35, 100460. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Lu, Y. Cooperative Delivery of Truck-UAV with Consideration of the UAV Track. In Proceedings of the 2023 19th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Harbin, China, 29–31 July 2023; pp. 1–6. [Google Scholar]
- Elhadeedy, A.; Daily, J. Securing New Autonomous Truck-Trailer Communication Protocols. In Proceedings of the 2023 IEEE World AI IoT Congress (AIIoT), Virtual, 7–10 June 2023; pp. 0384–0391. [Google Scholar]
- Simpson, J.R.; Mishra, S.; Talebian, A.; Golias, M.M. An Estimation of the Future Adoption Rate of Autonomous Trucks by Freight Organizations. Res. Transp. Econ. 2019, 76, 100737. [Google Scholar] [CrossRef]
- Simpson, J.R.; Sharma, I.; Mishra, S. Modeling Trucking Industry Perspective on the Adoption of Connected and Autonomous Trucks. Res. Transp. Bus. Manag. 2022, 45, 100883. [Google Scholar] [CrossRef]
- Ackerman, E. Robot Trucks Overtake Robot Cars: This Year, Trucks Will Drive Themselves on Public Roads with No One on Board. IEEE Spectr. 2021, 58, 42–43. [Google Scholar] [CrossRef]
- Fritschy, C.; Spinler, S. The Impact of Autonomous Trucks on Business Models in the Automotive and Logistics Industry–a Delphi-Based Scenario Study. Terrain-Adapt. Longitud. Control Auton. Trucks 2019, 148, 119736. [Google Scholar] [CrossRef]
- Simpson, J.R.; Mishra, S. Developing a Methodology to Predict the Adoption Rate of Connected Autonomous Trucks in Transportation Organizations Using Peer Effects. Res. Transp. Econ. 2021, 90, 100866. [Google Scholar] [CrossRef]
- Balata, D.; Menghes, R. Innovation Diffusion Dynamics and Behavior of Actors in Road Freight Transportation: A Study of the Market Uptake Dynamics and Adoption of Driverless Trucks. 2021. Available online: https://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-296515 (accessed on 12 June 2023).
- Hodes, C.; McCabe, P.; McGeeney, A.; Smith, S.; Sun, I.; Awwad, M. The Future of Autonomous Trucks in the Supply Chain Industry. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2020; pp. 203–208. Available online: https://www.proceedings.com/58547.html (accessed on 20 August 2024).
- Wang, J.; Tian, B.; Zhu, Y.; Yao, T.; Pan, Z.; Chen, L. Terrain Mapping for Autonomous Trucks in Surface Mine. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 4369–4374. [Google Scholar]
- Andersson, P.; Ivehammar, P. Benefits and Costs of Autonomous Trucks and Cars. J. Transp. Technol. 2019, 9, 121–145. [Google Scholar] [CrossRef]
- Lee, S.; Cho, K.; Park, H.; Cho, D. Cost-Effectiveness of Introducing Autonomous Trucks: From the Perspective of the Total Cost of Operation in Logistics. Appl. Sci. 2023, 13, 10467. [Google Scholar] [CrossRef]
- Sen, B.; Kucukvar, M.; Onat, N.C.; Tatari, O. Life Cycle Sustainability Assessment of Autonomous Heavy-Duty Trucks. J. Ind. Ecol. 2019, 24, 149–164. [Google Scholar] [CrossRef]
- Tao, X.; Mårtensson, J.; Warnquist, H.; Pernestål, A. Short-Term Maintenance Planning of Autonomous Trucks for Minimizing Economic Risk. Reliab. Eng. Syst. Saf. 2022, 220, 108251. [Google Scholar] [CrossRef]
- Engholm, A.; Kristoffersson, I.; Pernestal, A. Impacts of Large-Scale Driverless Truck Adoption on the Freight Transport System. Transp. Res. Part Policy Pract. 2021, 154, 227–254. [Google Scholar] [CrossRef]
- Sigle, S.; Hahn, R. Energy Assessment of Different Powertrain Options for Heavy-Duty Vehicles and Energy Implications of Autonomous Driving. Energies 2023, 16, 6512. [Google Scholar] [CrossRef]
- Lunkeit, S.; Flämig, H.; Rosenberger, K. The Impact of Driverless Vehicles on Transportation Costs in Road Haulage: A System Dynamical Approach. In Proceedings of the Advances in Production, Logistics and Traffic; Clausen, U., Langkau, S., Kreuz, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 116–127. [Google Scholar]
- Zhao, Z.; Bi, L. A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Appl. Sci. 2020, 10, 6622. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Meng, Q. Autonomous Truck Scheduling for Container Transshipment between Two Seaport Terminals Considering Platooning and Speed Optimization. Transp. Res. Part B Methodol. 2021, 154, 289–315. [Google Scholar] [CrossRef]
- Al Hajj Hassan, L.; Hewitt, M.; Mahmassani, H.S. Daily Load Planning under Different Autonomous Truck Deployment Scenarios. Transp. Res. Part E Logist. Transp. Rev. 2022, 166, 102885. [Google Scholar] [CrossRef]
- Bouguerra, A.; Andreasson, H.; Lilienthal, A.J.; Åstrand, B.; Rögnvaldsson, T. MALTA: A System of Multiple Autonomous Trucks for Load Transportation; KoREMA: Weiterstadt, Germany, 2009; pp. 91–96. [Google Scholar]
- Fang, Y.; Peng, X. Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics 2023, 12, 3793. [Google Scholar] [CrossRef]
- Price, R.; Cornelius, M.; Burnside, L.; Miller, B. Mine Planning and Selection of Autonomous Trucks. In Proceedings of the 28th International Symposium on Mine Planning and Equipment Selection—MPES 2019; Topal, E., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 203–212. [Google Scholar]
- Zhang, X.; Guo, A.; Ai, Y.; Tian, B.; Chen, L. Real-Time Scheduling of Autonomous Mining Trucks via Flow Allocation-Accelerated Tabu Search. IEEE Trans. Intell. Veh. 2022, 7, 466–479. [Google Scholar] [CrossRef]
- Hasgul, Z.; Aytore, C. Road Selection for Autonomous Trucks in Turkey with Fuzzy AHP. In Proceedings of the Intelligent and Fuzzy Techniques: Smart and Innovative Solutions; Kahraman, C., Cevik Onar, S., Oztaysi, B., Sari, I.U., Cebi, S., Tolga, A.C., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 582–590. [Google Scholar]
- Nasri, M.I.; Bektaş, T.; Laporte, G. Route and Speed Optimization for Autonomous Trucks. Comput. Oper. Res. 2018, 100, 89–101. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, L.; Ai, Y.; Tian, B.; Cao, D.; Li, L. Scheduling of Autonomous Mining Trucks: Allocation Model Based Tabu Search Algorithm Development. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 982–989. [Google Scholar]
- Chen, C.-M.; Lu, Y. Shipment Sizing for Autonomous Trucks of Road Freight. Int. J. Logist. Manag. 2020, 32, 413–433. [Google Scholar] [CrossRef]
- Tian, F.; Zhou, R.; Li, Z.; Li, L.; Gao, Y.; Cao, D.; Chen, L. Trajectory Planning for Autonomous Mining Trucks Considering Terrain Constraints. IEEE Trans. Intell. Veh. 2021, 6, 772–786. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Chen, P.; Yu, G.; Liao, Y. A Secure Trajectory Planning Method for Connected Autonomous Vehicles at Mining Site. Symmetry 2023, 15, 1973. [Google Scholar] [CrossRef]
- Hong, C.; Guo, Y.; Wang, Y.; Li, T. The Integrated Scheduling Optimization for Container Handling by Using Driverless Electric Truck in Automated Container Terminal. Sustainability 2023, 15, 5536. [Google Scholar] [CrossRef]
- Salip, D.; Mavlonazarov, K.; Razumowsky, A. Optimization of Energy Consumption by Autonomous Electric Trucks during Cargo Transportation Based on the Artificial Bee Colony Algorithm. In Proceedings of the 2023 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 15–19 May 2023; pp. 520–525. [Google Scholar]
- Chen, S.; Wang, H.; Meng, Q. Cost Allocation of Cooperative Autonomous Truck Platooning: Efficiency and Stability Analysis. Transp. Res. Part B Methodol. 2023, 173, 119–141. [Google Scholar] [CrossRef]
- Wang, H.; Song, L.; Wei, Z.; Peng, L.; Li, J.; Hashemi, E. Driving Safety Zone Model Oriented Motion Planning Framework for Autonomous Truck Platooning. Accid. Anal. Prev. 2023, 193, 107225. [Google Scholar] [CrossRef]
- Hoque, M.M.; Lu, Q.; Ghiasi, A.; Xin, C. Highway Cost Analysis for Platooning of Connected and Autonomous Trucks. J. Transp. Eng. Part Syst. 2020, 147, 04020148. [Google Scholar] [CrossRef]
- Liu, D.; Eksioglu, B.; Schmid, M.J.; Huynh, N.; Comert, G. Optimizing Energy Savings for a Fleet of Commercial Autonomous Trucks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7570–7586. [Google Scholar] [CrossRef]
- Schirrer, A.; Haniš, T.; Klaučo, M.; Thormann, S.; Hromčík, M.; Jakubek, S. Safety-Extended Explicit MPC for Autonomous Truck Platooning on Varying Road Conditions. IFAC-Pap. 2020, 53, 14344–14349. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R. Truck Platoon Analysis for Autonomous Trucks. SN Appl. Sci. 2023, 5, 143. [Google Scholar] [CrossRef]
- de Curtò, J.; de Zarzà, I.; Cano, J.C.; Manzoni, P.; Calafate, C.T. Adaptive Truck Platooning with Drones: A Decentralized Approach for Highway Monitoring. Electronics 2023, 12, 4913. [Google Scholar] [CrossRef]
- Chen, J.; Zhou, Z.; Duan, Y.; Yu, B. Research on Reinforcement-Learning-Based Truck Platooning Control Strategies in Highway On-Ramp Regions. World Electr. Veh. J. 2023, 14, 273. [Google Scholar] [CrossRef]
- Muhamadinah, Y.; Arrinanda, A.Z.; Joelianto, E.; Widyotriatmo, A. Backstepping Control Design for Platooning Formation System in Down Scale Autonomous Truck Trailers. In Proceedings of the 2019 IEEE 6th Asian Conference on Defence Technology (ACDT), Bali, Indonesia, 13–15 November 2019; pp. 136–141. [Google Scholar]
- Jingwen, L.; Fang, Y.; Yaqian, N.; Jingzhi, W.; Yongsheng, Y. Research on Driverless Truck PLATOON Control Based on Improved Variable Time Headway Policy. In Proceedings of the 2022 International Symposium on Sensing and Instrumentation in 5G and IoT Era (ISSI), Shanghai, China, 17–18 November 2022; pp. 24–28. [Google Scholar]
- Chen, F.; Song, M.; Ma, X.; Zhu, X. Assess the Impacts of Different Autonomous Trucks’ Lateral Control Modes on Asphalt Pavement Performance. Transp. Res. Part C Emerg. Technol. 2019, 103, 17–29. [Google Scholar] [CrossRef]
- Georgouli, K.; Plati, C. Autonomous Trucks’ (ATs) Lateral Distribution and Asphalt Pavement Performance. Int. J. Pavement Eng. 2022, 24, 2046274. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Impact of Autonomous Truck Implementation: Rutting and Highway Safety Perspectives. Road Mater. Pavement Des. 2020, 23, 2205–2226. [Google Scholar] [CrossRef]
- Gungor, O.E.; She, R.; Al-Qadi, I.L.; Ouyang, Y. One for All: Decentralized Optimization of Lateral Position of Autonomous Trucks in a Platoon to Improve Roadway Infrastructure Sustainability. Transp. Res. Part C Emerg. Technol. 2020, 120, 102783. [Google Scholar] [CrossRef]
- Gungor, O.E.; She, R.; Al-Qadi, I.L.; Ouyang, Y.; University of Illinois at Urbana-Champaign, Department of Civil and Environmental Engineering. Optimization of Lateral Position of Autonomous Trucks; Illinois Center for Transportation: Rantoul, IL, USA, 2018. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. Organization of Autonomous Truck Platoon Considering Energy Saving and Pavement Fatigue. Transp. Res. Part Transp. Environ. 2021, 90, 102667. [Google Scholar] [CrossRef]
- Huang, K.; Cai, S.; Birgisson, B. Performance Impact of Autonomous Trucks on Flexible Pavements: An Evaluation Framework and Case Studies. Int. J. Pavement Eng. 2023, 24, 2229481. [Google Scholar] [CrossRef]
- Merhebi, G.H.; Joumblat, R.; Elkordi, A. Assessment of the Effect of Different Loading Combinations Due to Truck Platooning and Autonomous Vehicles on the Performance of Asphalt Pavement. Sustainability 2023, 15, 10805. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. A Simulation of the Traffic Behavior with Autonomous Truck Platoons Based on Cellular Automaton. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 416–423. [Google Scholar]
- Kohls, A.G. Autonomous Truck Mounted Attenuator (ATMA) Pilot; Tennessee Department of Transportation: Nashville, TN, USA, 2020. [Google Scholar]
- Tang, Q.; Hu, X.; Yang, H. Identification of Operational Design Domain for Autonomous Truck Mounted Attenuator System on Multilane Highways. Transp. Res. Rec. 2021, 2676, 1–15. [Google Scholar] [CrossRef]
- Yuan, Z.; Herve, S. Optimal Models for Autonomous Trucks and Drones Resupply for Last-Mile Delivery in Urban Areas. IFAC-Pap. 2022, 55, 3142–3147. [Google Scholar] [CrossRef]
- Erlandson, W. Traffic Flow Implications of Driverless Trucks Microscopic Traffic Simulations Using SUMO; Department of Technology and Society Lund University: Lund, Sweden, 2020. [Google Scholar]
- Ho, C.C.; Ulfitria, R.U.S. Automatic Anti-Lock Brake System for Anti-Rollover Control of Autonomous Heavy-Duty Truck. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics, Taipei, Taiwan, 6–8 July 2022; pp. 181–182. [Google Scholar]
- Stentz, A.; Bares, J.; Singh, S.; Rowe, P. A Robotic Excavator for Autonomous Truck Loading. Auton. Robots 1999, 7, 175–186. [Google Scholar] [CrossRef]
- Noorvand, H.; Karnati, G.; Underwood, B.S. Autonomous Vehicles: Assessment of the Implications of Truck Positioning on Flexible Pavement Performance and Design. Transp. Res. Rec. 2017, 2640, 21–28. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R.; Fuleki, P. Creep Model to Determine Rut Development by Autonomous Truck Axles on Pavement. Pollack Period. 2020, 17, 66–71. [Google Scholar] [CrossRef]
- Fahad, M.; Nagy, R. Effective Lane Width Analysis for Autonomous Trucks. SN Appl. Sci. 2023, 5, 232. [Google Scholar] [CrossRef]
- Adegbohun, F.; von Jouanne, A.; Agamloh, E.; Yokochi, A. Geographical Modeling of Charging Infrastructure Requirements for Heavy-Duty Electric Autonomous Truck Operations. Energies 2023, 16, 4161. [Google Scholar] [CrossRef]
- Benlaajili, S.; Moutaouakkil, F.; Chebak, A. Infrastructural Requirements for the Implementation of Autonomous Trucks in Open-Pit Mines. E3S Web Conf. 2021, 315, 03009. [Google Scholar] [CrossRef]
- Jehanfo, H.; Hu, S.; Kaparias, I.; Preston, J.; Zhou, F.; Stevens, A. Redesigning Highway Infrastructure Systems for Connected Autonomous Truck Lanes. J. Transp. Eng. Part Syst. 2022, 148, 04022104. [Google Scholar] [CrossRef]
- Sajid, S.; Chouinard, L.; Legeron, F.; Ude, T.; He, E.; Ajrab, J. Reliability Analysis of Bridges for Autonomous Truck Platoons. Transp. Res. Rec. 2023, 2677, 1071–1081. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Simulation of Autonomous Truck for Minimizing Asphalt Pavement Distresses. Road Mater. Pavement Des. 2021, 23, 1266–1286. [Google Scholar] [CrossRef]
- Tohme, R.; Yarnold, M. Steel Bridge Load Rating Impacts Owing to Autonomous Truck Platoons. Transp. Res. Rec. 2020, 2674, 57–67. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publisher | Number of Selected Papers |
|---|---|
| IEEE | 38 |
| Elsevier | 22 |
| MDPI | 17 |
| Springer | 7 |
| SAGE | 7 |
| Informa | 5 |
| Other publishers | 29 |
| Total | 125 |
| Journal/Conference | Number of Selected Papers |
|---|---|
| Transportation Research Record | 6 |
| IEEE Transactions on Intelligent Transportation Systems | 5 |
| IEEE Intelligent Transportation Systems Conference (ITSC) | 5 |
| International Conference on Instrumentation, Control, and Automation (ICA) | 5 |
| SN Applied Sciences | 4 |
| Sustainability | 4 |
| IFAC-PapersOnLine | 4 |
| IEEE Transactions on Intelligent Vehicles | 3 |
| IEEE Intelligent Vehicles Symposium (IV) | 3 |
| Research in Transportation Economics | 2 |
| Transportation Research Part C: Emerging Technologies | 2 |
| Energies | 2 |
| Electronics | 2 |
| Transportation Research Part D: Transport and Environment | 2 |
| Transportation Research Part E: Logistics and Transportation Review | 2 |
| Sensors | 2 |
| Journal of Transportation Engineering, Part A: Systems | 2 |
| Road Materials and Pavement Design | 2 |
| Transportation Research Part B: Methodological | 2 |
| International Journal of Pavement Engineering | 2 |
| Other journals/conferences | 64 |
| Total | 125 |
| Foundational Aspects of ATs Implementation | |||||
|---|---|---|---|---|---|
| Core Technology for ATs Implementation | |||||
| Acceptance Survey | Legal, Operational, and Social Barriers | Truck Maneuvering | Environment Recognizing | Connections | Adoption Rate Prediction |
| [32,33,34,35,36,37] | [38,39,40,41,42,43,44,45,46,47,48,49] | [50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74] | [75,76,77,78,79,80,81,82,83] | [84,85,86,87,88,89,90,91] | [92,93,94,95,96,97,98] |
| Practical Implementation and Economic Analysis of ATs | |||||
|---|---|---|---|---|---|
| Systemic Performance Optimization | |||||
| Platooning | |||||
| Cost Estimation | Planning | Performance | Pavement | Others | Infrastructure |
| [20,100,101,102,103,104,105,106] | [107,108,109,110,111,112,113,114,115,116,117,118,119,120,121] | [122,123,124,125,126,127,128,129,130,131] | [132,133,134,135,136,137,138,139] | [99,140,141,142,143,144,145] | [146,147,148,149,150,151,152,153,154,155] |
| Autonomy Description | ||
|---|---|---|
| Autonomous | Connected | Assisted |
| [20,33,37,38,39,40,41,42,44,45,46,47,48,49,50,52,53,54,55,56,57,61,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,94,95,96,97,98,99,100,101,103,104,105,106,107,109,111,112,114,115,116,117,120,121,124,134,140,141,143,145,146,147,148,149,150,154] | [34,36,43,59,60,62,84,85,86,87,88,89,90,91,92,93,102,108,110,113,118,119,122,123,124,125,126,127,128,129,130,131,132,133,135,136,137,138,139,142,144,151,152,153,155] | [32,35,37,38,51,58,92,98] |
| Data Collecting Method | |||
|---|---|---|---|
| Existing Data | Simulation | Questionnaire | Real Word Test |
| [20,39,40,41,43,44,46,50,52,65,71,88,89,94,98,100,101,102,103,104,105,108,117,120,133,138,139,141,143,152,153,155] | [34,38,41,51,54,56,58,60,61,62,64,66,68,69,70,72,74,76,80,81,82,84,90,91,96,106,110,111,114,115,116,118,121,122,123,124,125,126,127,128,129,130,131,134,135,140,142,144,145,147,148,149,150,154] | [32,33,35,36,37,42,45,47,48,92,93,95,97,98,151] | [53,55,57,58,59,63,67,73,75,77,78,79,83,85,86,87,99,107,109,113,119,132,136,137,146] |
| Environment of Study | ||
|---|---|---|
| Bounded | ||
| Unbounded | Mines | Others |
| [20,32,33,35,36,37,39,40,42,43,46,47,48,50,54,55,56,57,58,60,61,62,63,64,66,67,68,69,70,71,72,73,74,75,81,82,83,85,86,87,88,89,90,91,92,93,94,95,96,98,100,102,103,104,105,106,109,110,115,117,121,122,123,125,126,127,128,130,131,132,133,135,136,137,138,139,140,142,144,145,147,148,149,150,152,154] | [41,65,76,77,78,79,99,107,111,112,113,116,118,119,146,151] | [34,38,44,45,49,51,52,53,59,80,84,97,101,108,114,120,124,129,134,141,143,153,155] |
| ATs’ Fuel | ||
|---|---|---|
| Fossil Fuels | Electricity | N/A |
| [20,32,35,36,37,38,41,45,46,47,48,49,50,52,60,72,76,80,84,87,90,93,96,97,98,100,101,103,104,105,106,107,108,109,113,115,116,117,118,122,124,125,127,129,131,135,137,138,140,141,144,146,148] | [33,44,102,105,111,120,121,150] | [34,39,40,42,43,51,53,54,55,56,57,58,59,61,62,63,64,65,66,67,68,69,70,71,73,74,75,77,78,79,81,82,83,85,86,88,89,91,92,94,95,99,110,112,114,119,123,126,128,130,132,133,134,136,139,142,143,145,147,149,151,152,153,154,155] |
| Comparison Environment | ||
|---|---|---|
| Separate | Simultaneous | N/A |
| [41,44,45,50,51,52,59,60,65,72,76,77,80,84,85,87,92,101,103,107,108,111,112,113,114,115,116,117,118,119,120,121,122,124,125,126,127,128,130,131,132,133,134,135,136,137,138,141,143,150,151,152,153,155] | [32,38,43,49,56,62,67,69,73,74,104,105,109,110,123,129,139,140,144,147,148,149,154] | [20,33,34,35,36,37,39,40,42,46,47,48,53,54,55,57,58,61,63,64,66,68,70,71,75,78,79,81,82,83,86,88,89,90,91,93,94,95,96,97,98,99,100,102,106,142,145,146] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasiri, A.; Kermanshah, A. Exploring the Role of Autonomous Trucks in Addressing Challenges within the Trucking Industry: A Comprehensive Review. Systems 2024, 12, 320. https://doi.org/10.3390/systems12090320
Hasiri A, Kermanshah A. Exploring the Role of Autonomous Trucks in Addressing Challenges within the Trucking Industry: A Comprehensive Review. Systems. 2024; 12(9):320. https://doi.org/10.3390/systems12090320
Chicago/Turabian StyleHasiri, Ali, and Amirhassan Kermanshah. 2024. "Exploring the Role of Autonomous Trucks in Addressing Challenges within the Trucking Industry: A Comprehensive Review" Systems 12, no. 9: 320. https://doi.org/10.3390/systems12090320
APA StyleHasiri, A., & Kermanshah, A. (2024). Exploring the Role of Autonomous Trucks in Addressing Challenges within the Trucking Industry: A Comprehensive Review. Systems, 12(9), 320. https://doi.org/10.3390/systems12090320