
An Improved Driving Safety Field Model Based on Vehicle Movement Uncertainty for Highway Ramp Influence Areas



Abstract
1. Introduction
2. Literature Review
2.1. Safety Evaluation Based on Crash Data
2.2. Surrogate Safety Measures
2.3. Road Safety of Ramp Influence Areas
3. Data Materials
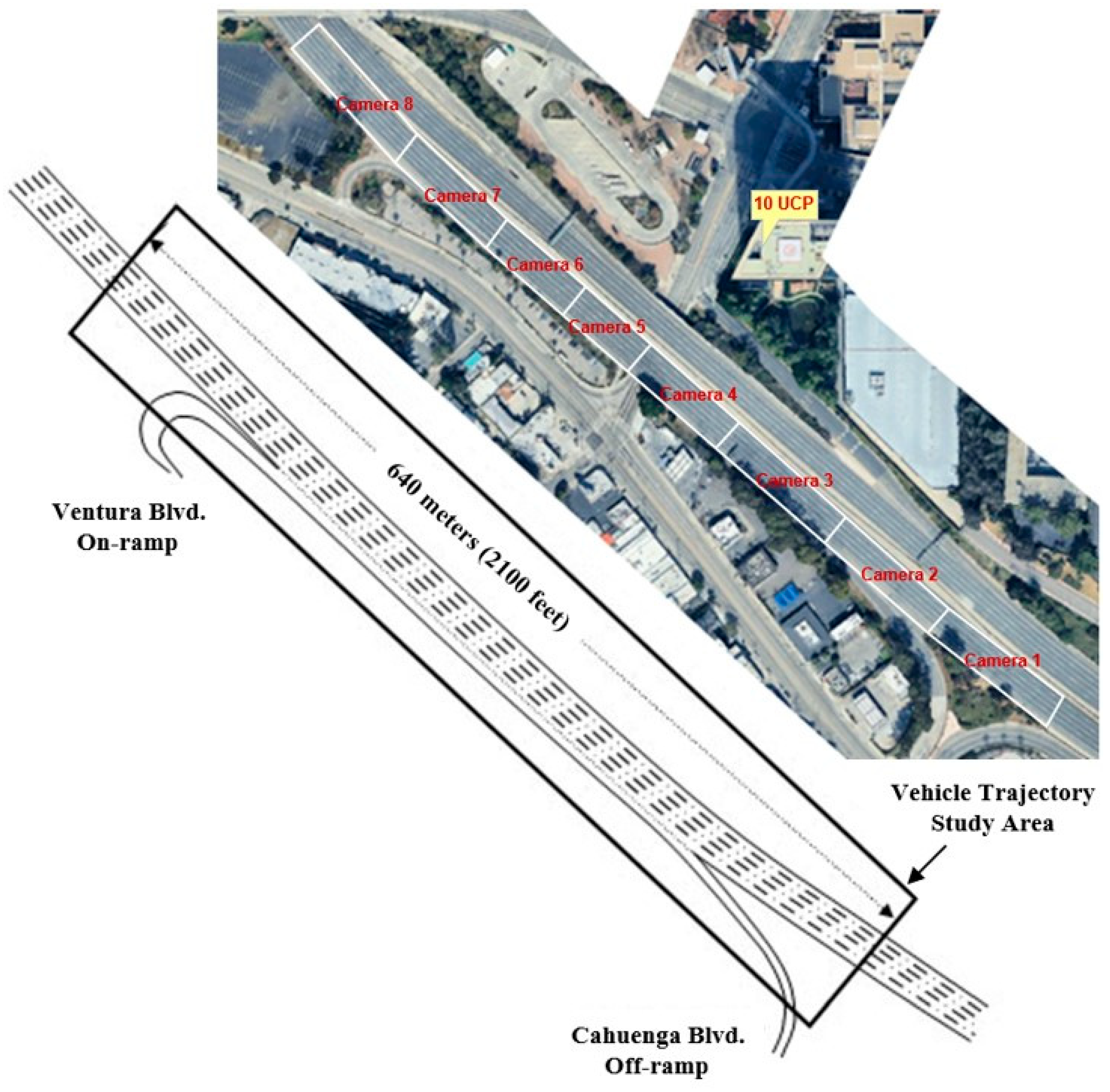
3.1. Introduction of US-101
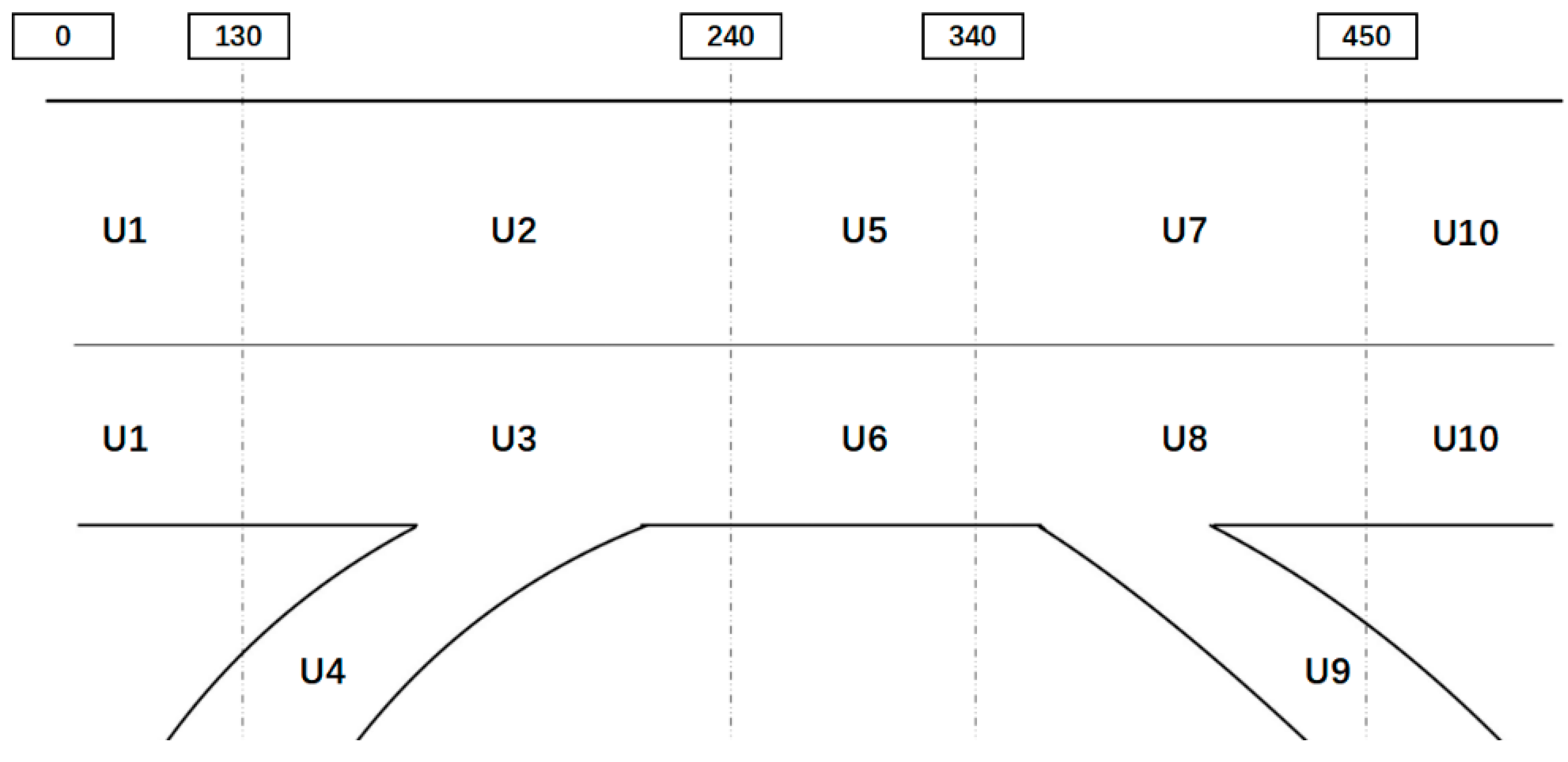
3.2. Ramp Area Segmentation
4. Methodology
4.1. Construction of Safety Field
4.2. Gaussian Mixture Model
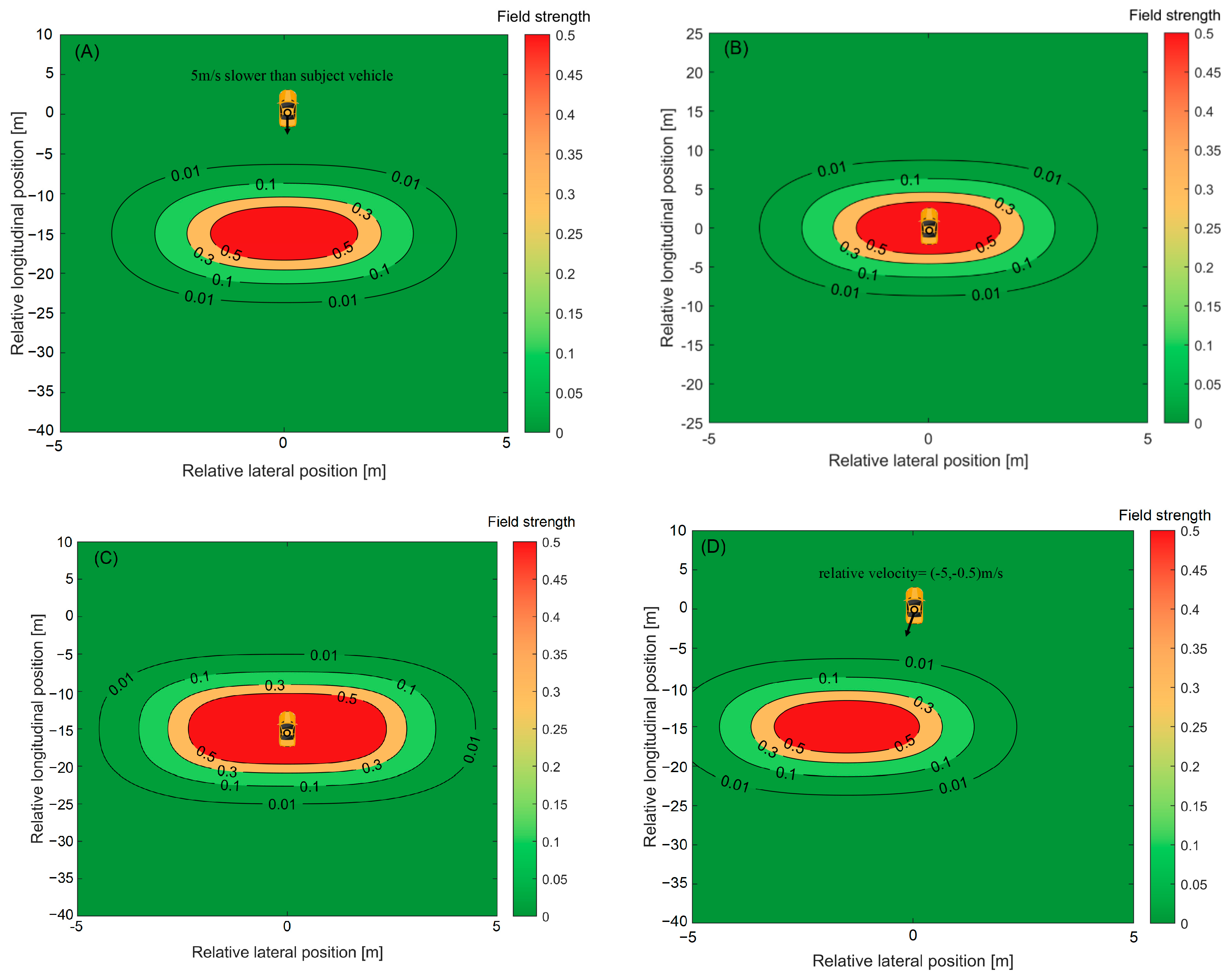
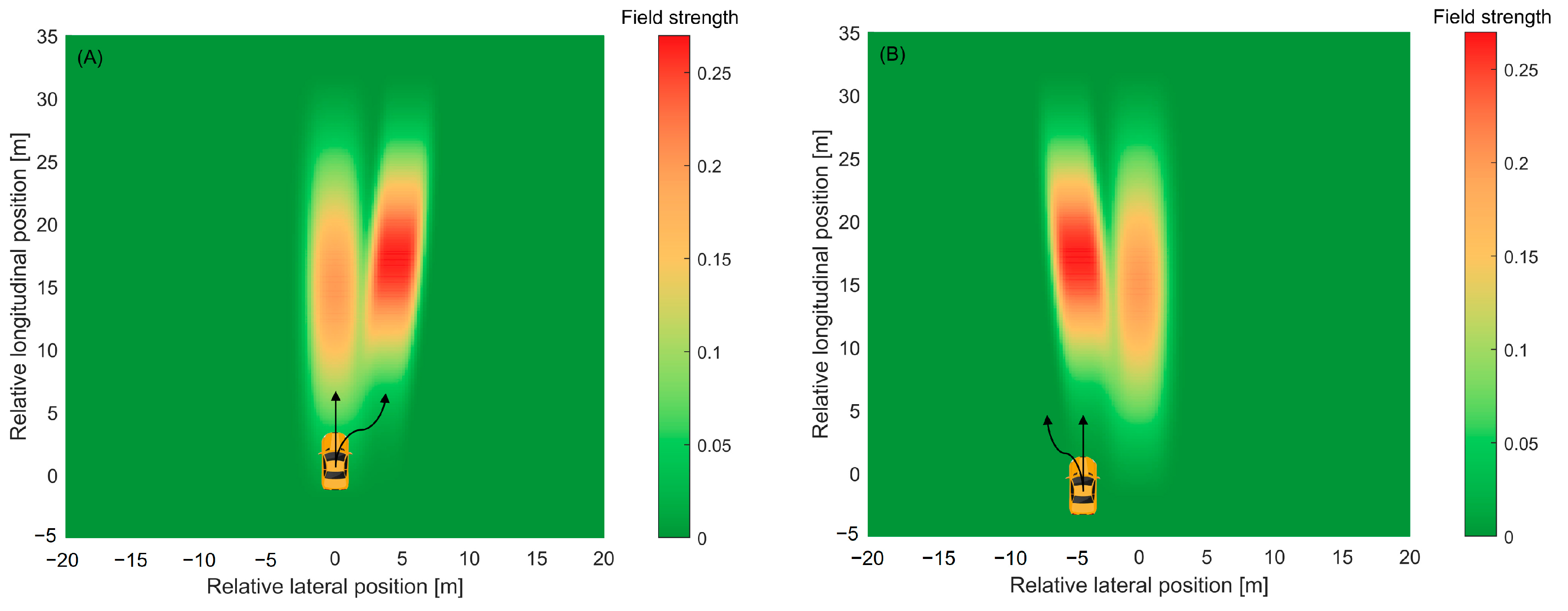
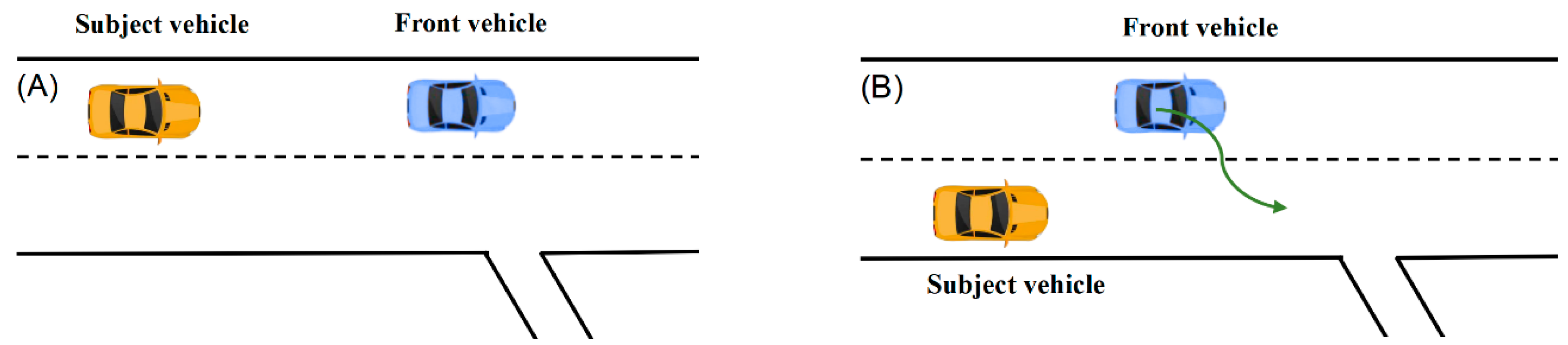
4.3. Driving Safety Field for Ramp Area
5. Results and Discussion
5.1. Calibration of Parameters in Driving Safety Field
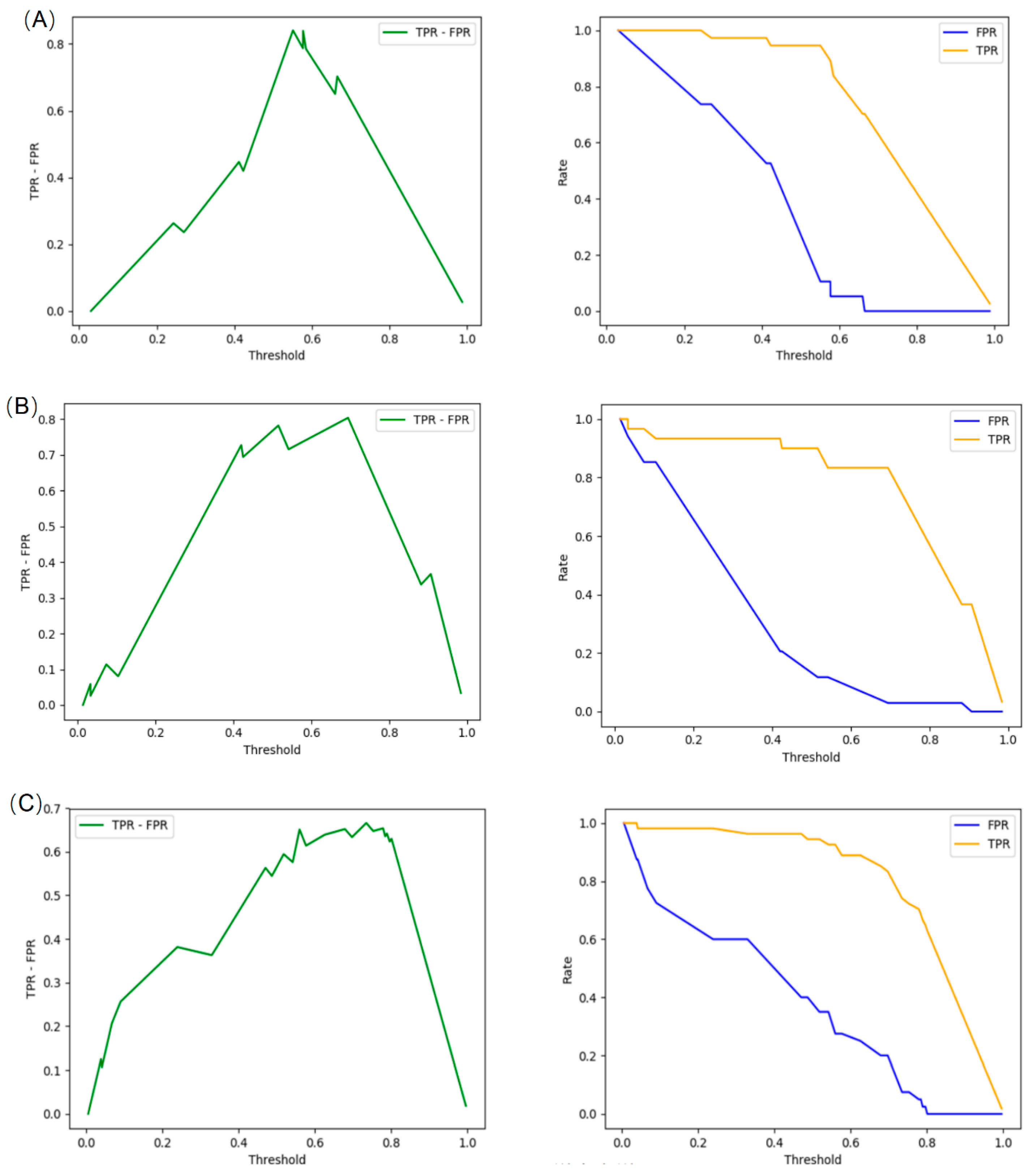
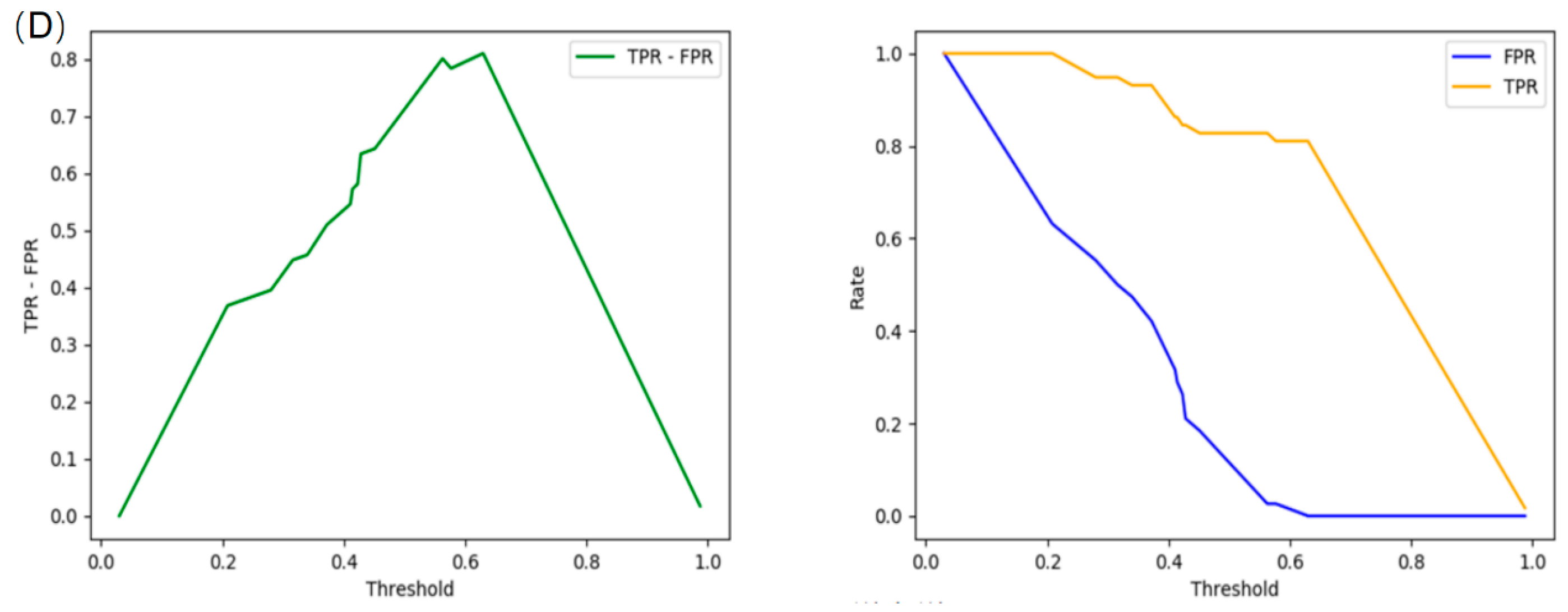
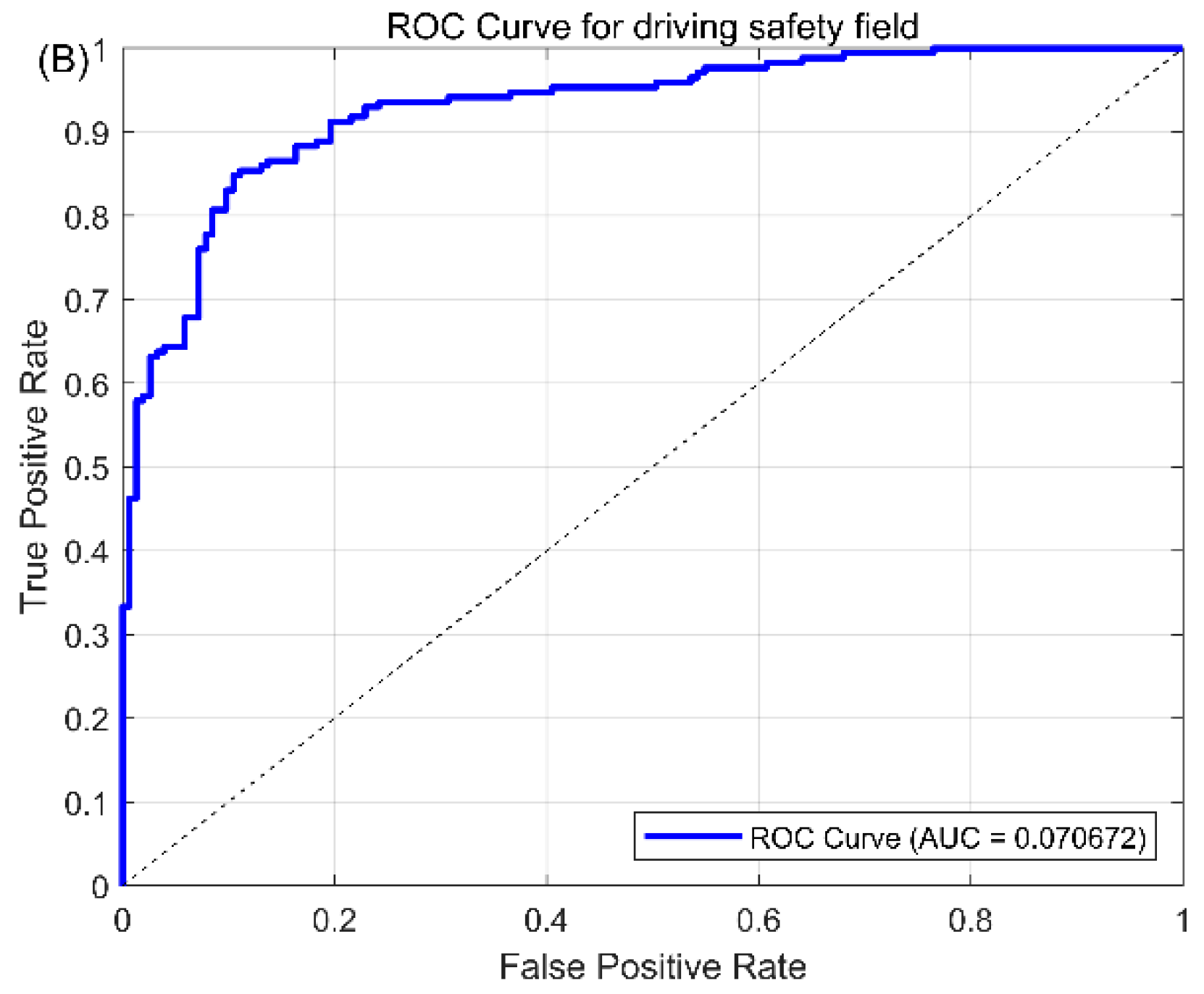
5.2. Finding the Critical-Event Threshold for the Driving Safety Field
5.3. Comparing Driving Safety Field with Time to Collision
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2019. [Google Scholar]
- Corona, D.; De Schutter, B. Adaptive cruise control for a SMART car: A comparison benchmark for MPC-PWA control methods. IEEE Trans. Control Syst. Technol. 2008, 16, 365–372. [Google Scholar] [CrossRef]
- Miaou, S.P.; Lum, H. Modeling vehicle accidents and highway geometric design relationships. Accid. Anal. Prev. 1993, 25, 689–709. [Google Scholar] [CrossRef] [PubMed]
- Bauer, K.M.; Harwood, D.W. Statistical Models of Accidents on Interchange Ramps and Speed-Change Lanes; United States Federal Highway Administration: Washington, DC, USA, 1997.
- Eller, E.; Frey, D. Psychological perspectives on perceived safety: Social factors of feeling safe. In Perceived Safety; Springer: Cham, Switzerland, 2019; pp. 43–60. [Google Scholar] [CrossRef]
- Garnowski, M.; Manner, H. On factors related to car accidents on German Autobahn connectors. Accid. Anal. Prev. 2011, 43, 1864–1871. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Liu, P.; Wang, W. Evaluation of the predictability of real-time crash risk models. Accid. Anal. Prev. 2016, 94, 207–215. [Google Scholar] [CrossRef]
- Zheng, L.; Sayed, T.; Mannering, F. Modeling traffic conflicts for use in road safety analysis: A review of analytic methods and future directions. Anal. Methods Accid. Res. 2021, 29, 100142. [Google Scholar] [CrossRef]
- Xu, Y.; Ye, W.; Xie, Y.; Wang, C. A two-dimensional surrogate safety measure based on fuzzy logic model. Accid. Anal. Prev. 2024, 199, 107529. [Google Scholar] [CrossRef]
- Xiong, X.; He, Y.; Gao, X.; Zhao, Y. A Multi-Level Risk Framework for Driving Safety Assessment Based on Vehicle Trajectory. Promet-Traffic Transp. 2022, 34, 959–973. [Google Scholar] [CrossRef]
- Hu, J.J.; Li, F.; Han, B.; Yao, J. Analysis of the influence on expressway safety of ramps. Arch. Transp. 2017, 43, 43–51. [Google Scholar] [CrossRef]
- Chu, H.; Zhuang, H.; Wang, W.; Na, X.; Guo, L.; Zhang, J.; Cao, B.; Chen, H. A review of driving style recognition methods from short-term and long-term perspectives. IEEE Trans. Intell. Veh. 2023, 8, 4599–4612. [Google Scholar] [CrossRef]
- Wang, W.; Xi, J.; Zhao, D. Driving style analysis using primitive driving patterns with Bayesian nonparametric approaches. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2986–2998. [Google Scholar] [CrossRef]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the 2011 14th International IEEE conference on intelligent transportation systems (ITSC), Washington, DC, USA, 5–7 October 2011; IEEE: New York, NY, USA; pp. 1609–1615. [Google Scholar]
- Shao, Y.; Shi, X.; Zhang, Y.; Zhang, Y.; Xu, Y.; Chen, W.; Ye, Z. Adaptive forward collision warning system for hazmat truck drivers: Considering differential driving behavior and risk levels. Accid. Anal. Prev. 2023, 191, 107221. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Tasic, I. Safety analysis of freeway on-ramp merging with the presence of autonomous vehicles. Accid. Anal. Prev. 2021, 152, 105966. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Yu, C.; Li, S.E.; Wang, L. A forward collision warning algorithm with adaptation to driver behaviors. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1157–1167. [Google Scholar] [CrossRef]
- Li, L.; Gan, J.; Qu, X.; Lu, W.; Mao, P.; Ran, B. A dynamic control method for cavs platoon based on the MPC framework and safety potential field model. KSCE J. Civ. Eng. 2021, 25, 1874–1886. [Google Scholar] [CrossRef]
- Mullakkal-Babu, F.A.; Wang, M.; He, X.; van Arem, B.; Happee, R. Probabilistic field approach for motorway driving risk assessment. Transp. Res. Part C Emerg. Technol. 2020, 118, 102716. [Google Scholar] [CrossRef]
- Kolekar, S.; De Winter, J.; Abbink, D. Human-like driving behaviour emerges from a risk-based driver model. Nat. Commun. 2020, 11, 1–13. [Google Scholar] [CrossRef]
- Miaou, S.P. The relationship between truck accidents and geometric design of road sections: Poisson versus negative binomial regressions. Accid. Anal. Prev. 1994, 26, 471–482. [Google Scholar] [CrossRef]
- El-Basyouny, K.; Sayed, T. Comparison of two negative binomial regression techniques in developing accident prediction models. Transp. Res. Rec. 2006, 1950, 9–16. [Google Scholar] [CrossRef]
- Lord, D.; Miranda-Moreno, L.F. Effects of low sample mean values and small sample size on the estimation of the fixed dispersion parameter of Poisson-gamma models for modeling motor vehicle crashes: A Bayesian perspective. Saf. Sci. 2008, 46, 751–770. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, P.; Liang, Q.; Wang, W. Effects of parallelogram-shaped pavement markings on vehicle speed and safety of pedestrian crosswalks on urban roads in China. Accid. Anal. Prev. 2016, 95, 438–447. [Google Scholar] [CrossRef]
- Alarifi, S.A.; Abdel-Aty, M.; Lee, J. A Bayesian multivariate hierarchical spatial joint model for predicting crash counts by crash type at intersections and segments along corridors. Accid. Anal. Prev. 2018, 119, 263–273. [Google Scholar] [CrossRef] [PubMed]
- Bauer, K.M.; Harwood, D.W. Safety effects of horizontal curve and grade combinations on rural two-lane highways. Transp. Res. Rec. 2013, 2398, 37–49. [Google Scholar] [CrossRef]
- Laureshyn, A.; Svensson, Å.; Hydén, C. Evaluation of traffic safety, based on micro-level behavioural data: Theoretical framework and first implementation. Accid. Anal. Prev. 2010, 42, 1637–1646. [Google Scholar] [CrossRef]
- Thomas, I. Spatial data aggregation: Exploratory analysis of road accidents. Accid. Anal. Prev. 1996, 28, 251–264. [Google Scholar] [CrossRef] [PubMed]
- Mountain, L.; Maher, M.; Fawaz, B. The influence of trend on estimates of accidents at junctions. Accid. Anal. Prev. 1998, 30, 641–649. [Google Scholar] [CrossRef] [PubMed]
- Washington, S.; Karlaftis, M.G.; Mannering, F.; Anastasopoulos, P. Statistical and Econometric Methods for Transportation Data Analysis; Chapman and Hall/CRC: Boca Raton, FL, USA, 2020. [Google Scholar]
- Islam, Z.; Abdel-Aty, M. Traffic conflict prediction using connected vehicle data. Anal. Methods Accid. Res. 2023, 39, 100275. [Google Scholar] [CrossRef]
- Orsini, F.; Gecchele, G.; Rossi, R.; Gastaldi, M. A conflict-based approach for real-time road safety analysis: Comparative evaluation with crash-based models. Accid. Anal. Prev. 2021, 161, 106382. [Google Scholar] [CrossRef]
- Formosa, N.; Quddus, M.; Ison, S.; Abdel-Aty, M.; Yuan, J. Predicting real-time traffic conflicts using deep learning. Accid. Anal. Prev. 2020, 136, 105429. [Google Scholar] [CrossRef]
- Laureshyn, A.; De Ceunynck, T.; Karlsson, C.; Svensson, Å.; Daniels, S. In search of the severity dimension of traffic events: Extended Delta-V as a traffic conflict indicator. Accid. Anal. Prev. 2017, 98, 46–56. [Google Scholar] [CrossRef]
- Moon, S.; Moon, I.; Yi, K. Design, tuning, and evaluation of a full-range adaptive cruise control system with collision avoidance. Control Eng. Pract. 2009, 17, 442–455. [Google Scholar] [CrossRef]
- Minderhoud, M.M.; Bovy, P.H. Extended time-to-collision measures for road traffic safety assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef] [PubMed]
- Songchitruksa, P.; Tarko, A.P. Practical method for estimating frequency of right-angle collisions at traffic signals. Transp. Res. Rec. 2006, 1953, 89–97. [Google Scholar] [CrossRef]
- Van Beinum, A.; Farah, H.; Wegman, F.; Hoogendoorn, S. Critical assessment of methodologies for operations and safety evaluations of freeway turbulence. Transp. Res. Rec. 2016, 2556, 39–48. [Google Scholar] [CrossRef]
- Wang, C.; Xie, Y.; Huang, H.; Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling. Accid. Anal. Prev. 2021, 157, 106157. [Google Scholar] [CrossRef] [PubMed]
- Eggert, J. Predictive risk estimation for intelligent ADAS functions. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; IEEE: New York, NY, USA; pp. 711–718. [Google Scholar]
- Mullakkal-Babu, F.A.; Wang, M.; Farah, H.; van Arem, B.; Happee, R. Comparative assessment of safety indicators for vehicle trajectories on highways. Transp. Res. Rec. 2017, 2659, 127–136. [Google Scholar] [CrossRef]
- Hwang, Y.K.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef]
- Ni, D. A unified perspective on traffic flow theory, Part I: The field theory. In ICCTP 2011: Towards Sustainable Transportation Systems; ASCE: Reston, VA, USA, 2011; pp. 4227–4243. [Google Scholar]
- Arun, A.; Haque, M.M.; Washington, S.; Mannering, F. A physics-informed road user safety field theory for traffic safety assessments applying artificial intelligence-based video analytics. Anal. Methods Accid. Res. 2023, 37, 100252. [Google Scholar] [CrossRef]
- Wang, J.; Wu, J.; Zheng, X.; Ni, D.; Li, K. Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C Emerg. Technol. 2016, 72, 306–324. [Google Scholar] [CrossRef]
- Haule, H.J.; Ali, M.S.; Alluri, P.; Sando, T. Evaluating the effect of ramp metering on freeway safety using real-time traffic data. Accid. Anal. Prev. 2021, 157, 106181. [Google Scholar] [CrossRef]
- Wahab, L.; Jiang, H. Severity prediction of motorcycle crashes with machine learning methods. Int. J. Crashworthiness 2019, 25, 485–492. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, J.; Jiang, H.; Cai, Y.; Xu, X. Stability research of distributed drive electric vehicle by adaptive direct yaw moment control. IEEE Access 2019, 7, 106225–106237. [Google Scholar] [CrossRef]
- Cong, S.; Wang, W.; Liang, J.; Chen, L.; Cai, Y. An automatic vehicle avoidance control model for dangerous lane-changing behavior. IEEE Trans. Intell. Transp. Syst. 2021, 23, 8477–8487. [Google Scholar] [CrossRef]
- Balke, K.; Chaudhary, N.; Songchitruksa, P.; Pesti, G. Development of Criteria and Guidelines for Installing, Operating, and Removing TxDOT Ramp Control Signals (No. FHWA/TX-09/0-5294-1); Texas Transportation Institute: College Station, TX, USA, 2009. [Google Scholar]
- Zhao, J.; Guo, Y.; Liu, P. Safety impacts of geometric design on freeway segments with closely spaced entrance and exit ramps. Accid. Anal. Prev. 2021, 163, 106461. [Google Scholar] [CrossRef]
- van Beinum, A.; Farah, H.; Wegman, F.; Hoogendoorn, S. Driving behaviour at motorway ramps and weaving segments based on empirical trajectory data. Transp. Res. Part C Emerg. Technol. 2018, 92, 426–441. [Google Scholar] [CrossRef]
- Kwak, H.C.; Kho, S. Predicting crash risk and identifying crash precursors on Korean expressways using loop detector data. Accid. Anal. Prev. 2016, 88, 9–19. [Google Scholar] [CrossRef]
- Kusuma, A.; Liu, R.; Choudhury, C.; Montgomery, F. Lane-changing characteristics at weaving section. In Proceedings of the Transportation Research Board 94th Annual Meeting, Washington, DC, USA, 11–15 January 2015; Volume 94, pp. 49–55. [Google Scholar]
- Colyar, J.; Halkias, J. US Highway101 Dataset; FHWA-HRT-07-030; Federal Highway Administration (FHWA): Washington, DC, USA, 2007.
- Reynolds, D.A. Gaussian mixture models. Encycl. Biom. 2009, 741, 659–663. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitudinal Position | Segment | Mean (and Var) of Lateral | Mean (and Var) of Longitudinal |
|---|---|---|---|
| 0–130 | Upstream | 0.043 (0.039) | 8.428 (10.795) |
| 130–240 | Entrance ramp | −0.012 (0.057) | 9.155 (14.281) |
| 240–340 | Mainline segment | −0.015 (0.032) | 9.475 (17.499) |
| 340–450 | Exit ramp influence | 0.005 (0.032) | 10.227 (20.429) |
| 450–700 | Downstream | 0.015 (0.044) | 10.488 (26.051) |
| Segment | Number of Components | Weight | Mean Vector | Covariance Matrix |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | 0.3043 | |||
| 4 | 0.3036 | |||
| 1 | 0.8960 | |||
| 2 | 0.1040 | |||
| 1 | 0.1445 | |||
| 2 | 0.6069 | |||
| 3 | 0.0737 | |||
| 4 | 0.1750 | |||
| 1 | 0.8146 | |||
| 2 | 0.1854 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Ye, W.; Luan, Y.; Cui, B. An Improved Driving Safety Field Model Based on Vehicle Movement Uncertainty for Highway Ramp Influence Areas. Systems 2024, 12, 370. https://doi.org/10.3390/systems12090370
Xu Y, Ye W, Luan Y, Cui B. An Improved Driving Safety Field Model Based on Vehicle Movement Uncertainty for Highway Ramp Influence Areas. Systems. 2024; 12(9):370. https://doi.org/10.3390/systems12090370
Chicago/Turabian StyleXu, Yueru, Wei Ye, Yalin Luan, and Bingbo Cui. 2024. "An Improved Driving Safety Field Model Based on Vehicle Movement Uncertainty for Highway Ramp Influence Areas" Systems 12, no. 9: 370. https://doi.org/10.3390/systems12090370
APA StyleXu, Y., Ye, W., Luan, Y., & Cui, B. (2024). An Improved Driving Safety Field Model Based on Vehicle Movement Uncertainty for Highway Ramp Influence Areas. Systems, 12(9), 370. https://doi.org/10.3390/systems12090370