
Small-Signal Stability Analysis for Multi-Terminal LVDC Distribution Network Based on Distributed Secondary Control Strategy



Abstract
:1. Introduction
- The detailed and accurate small-signal model of the whole multi-terminal LVDC system containing distributed secondary control is built.
- The stability of the entire LVDC distribution network is analyzed, and the effects of parameters variations on the small-signal stability are investigated by sensitivity analysis.
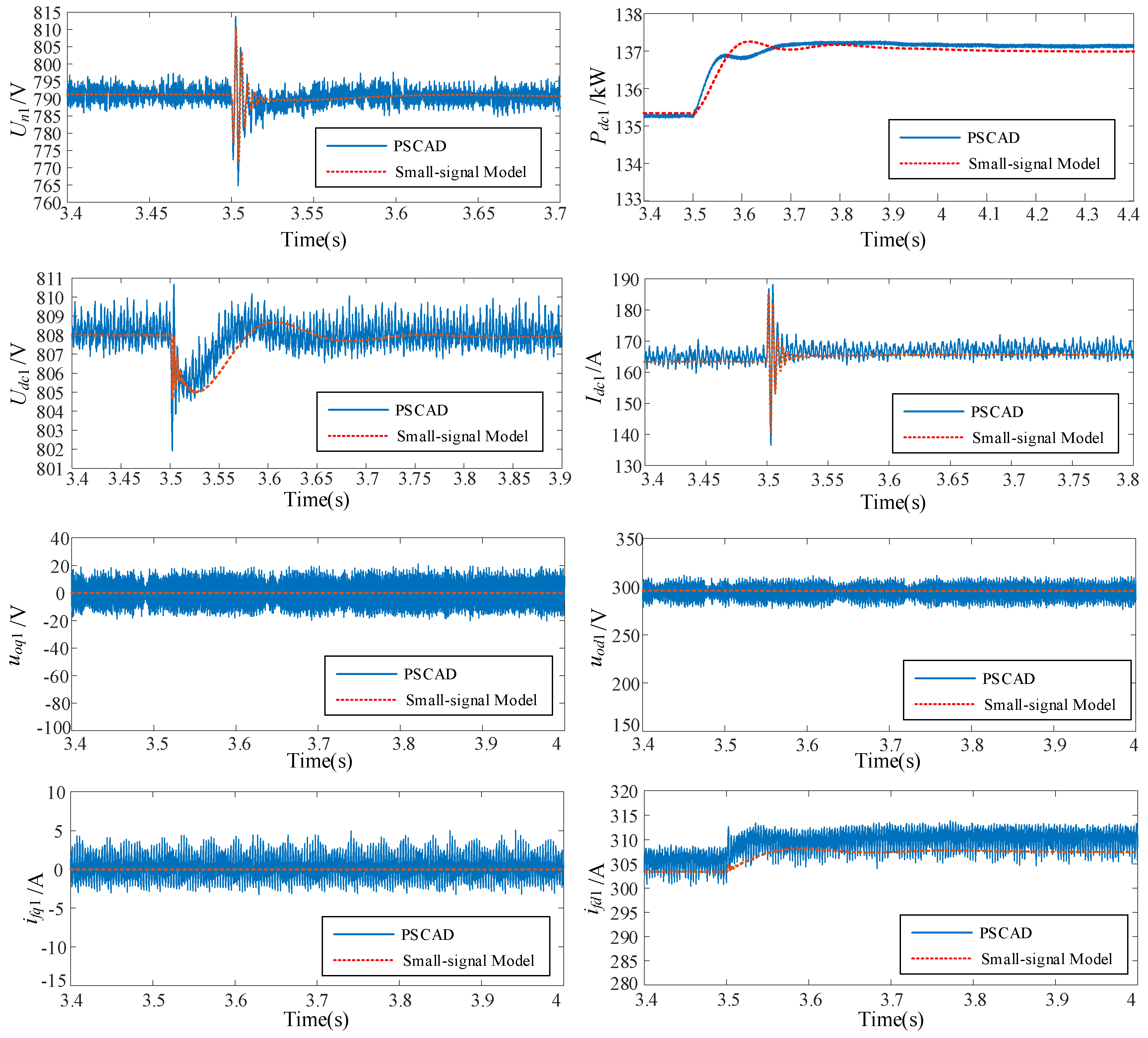
- The time-domain simulation by Simulink and the electromagnetic simulation by PSCAD are both conducted for the entire LVDC system to verify the accuracy of the model.
2. Operation Principle of the LVDC Distribution Network
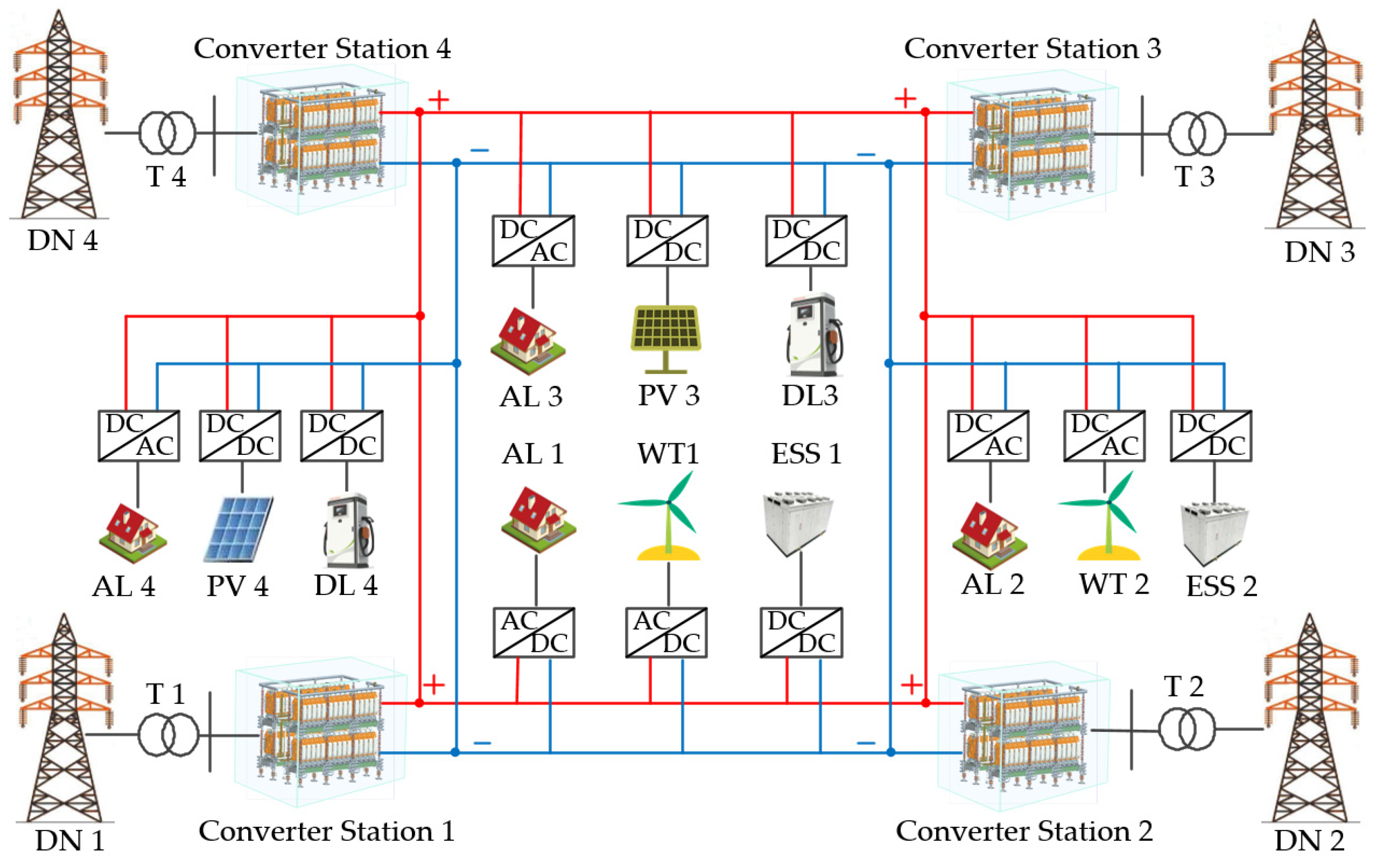
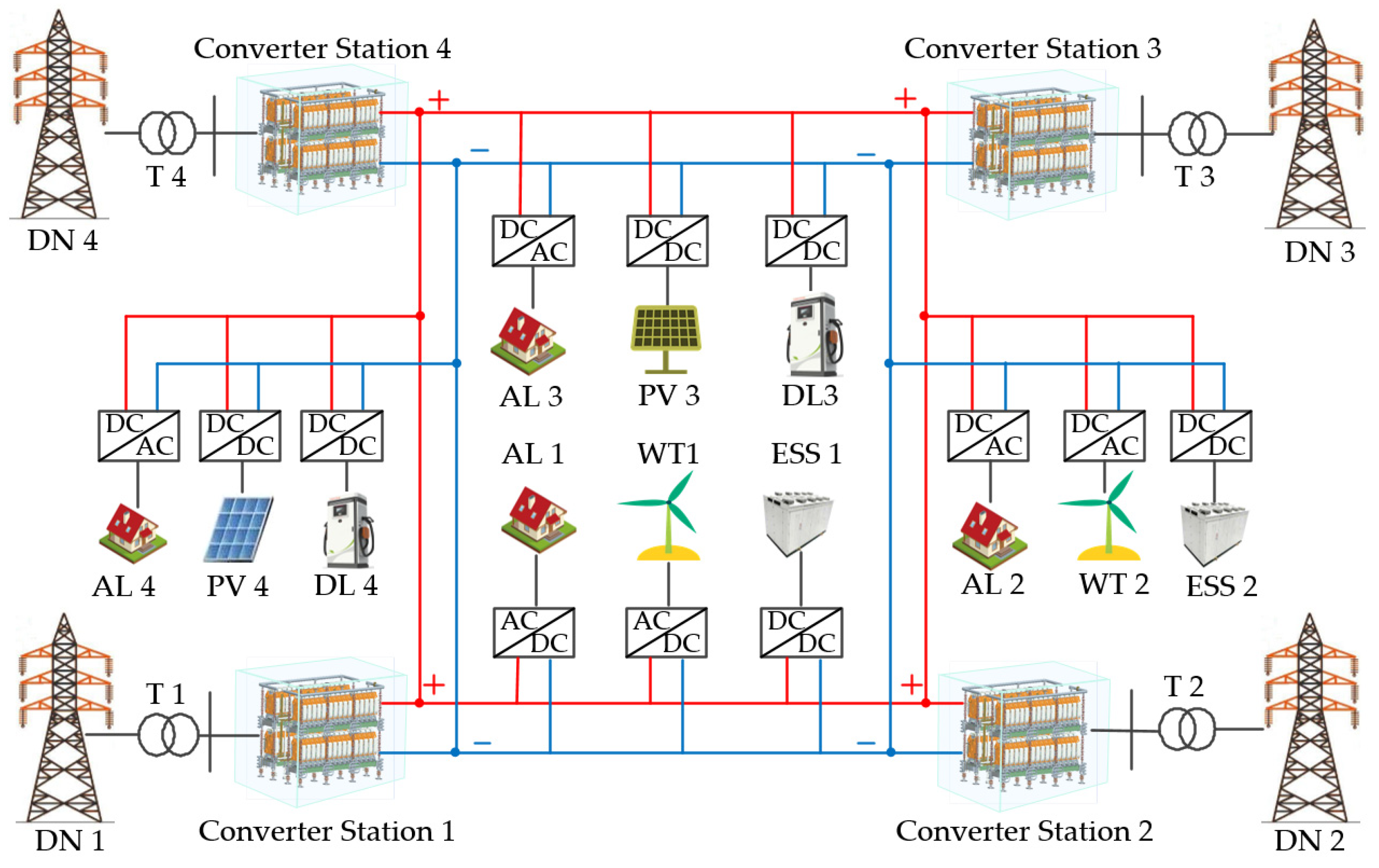
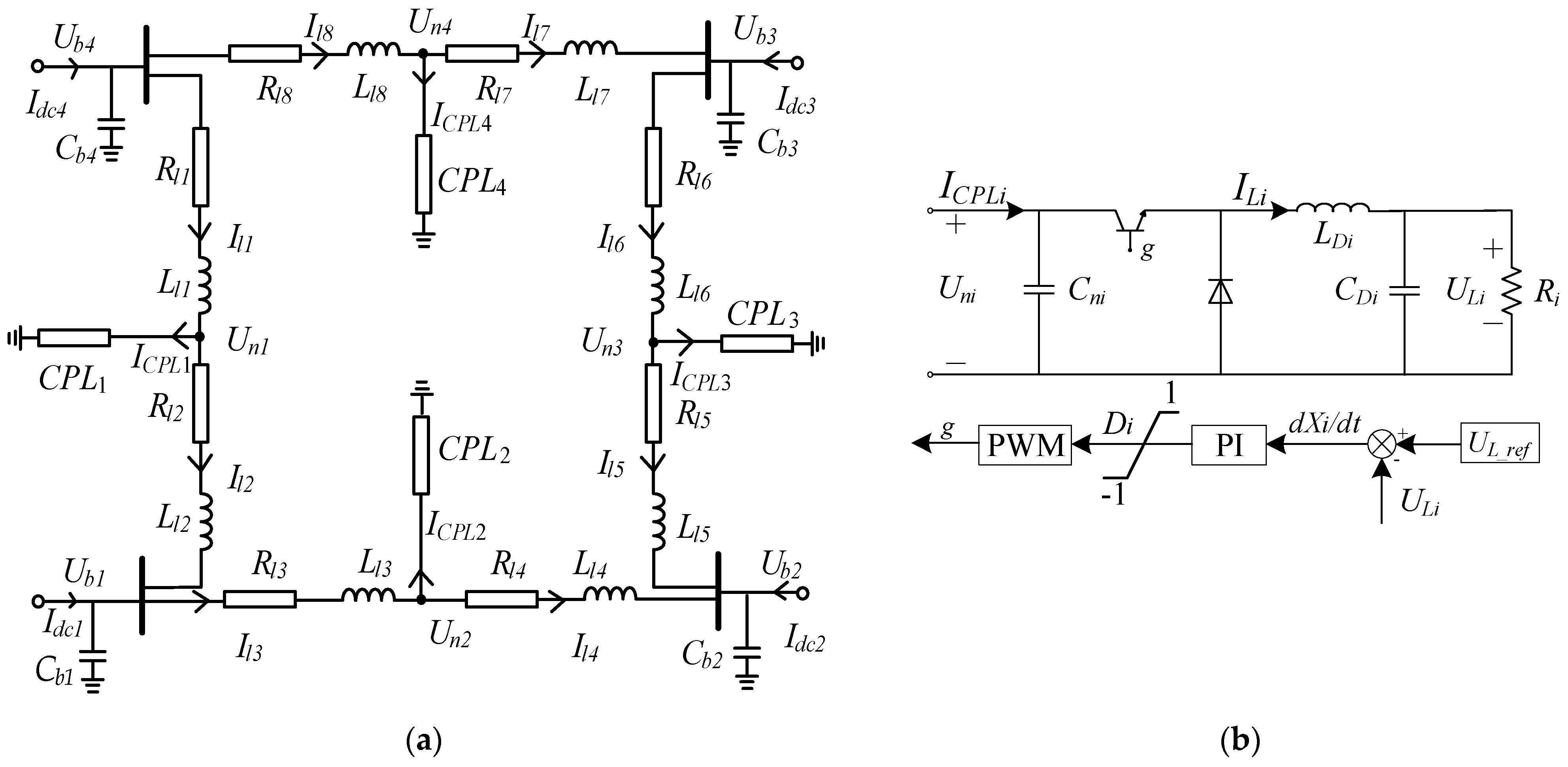
2.1. The Structure of LVDC Distribution Network
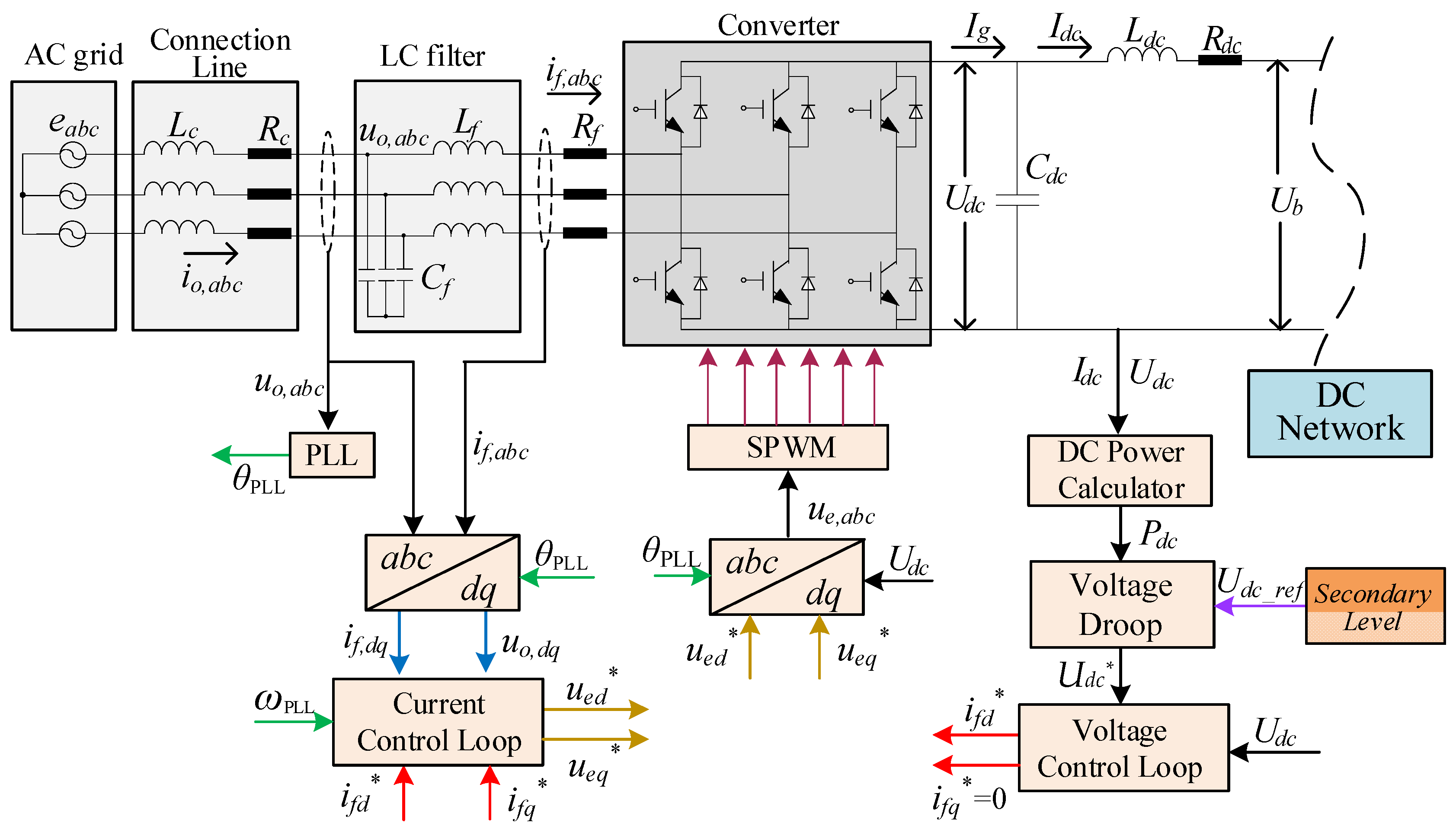
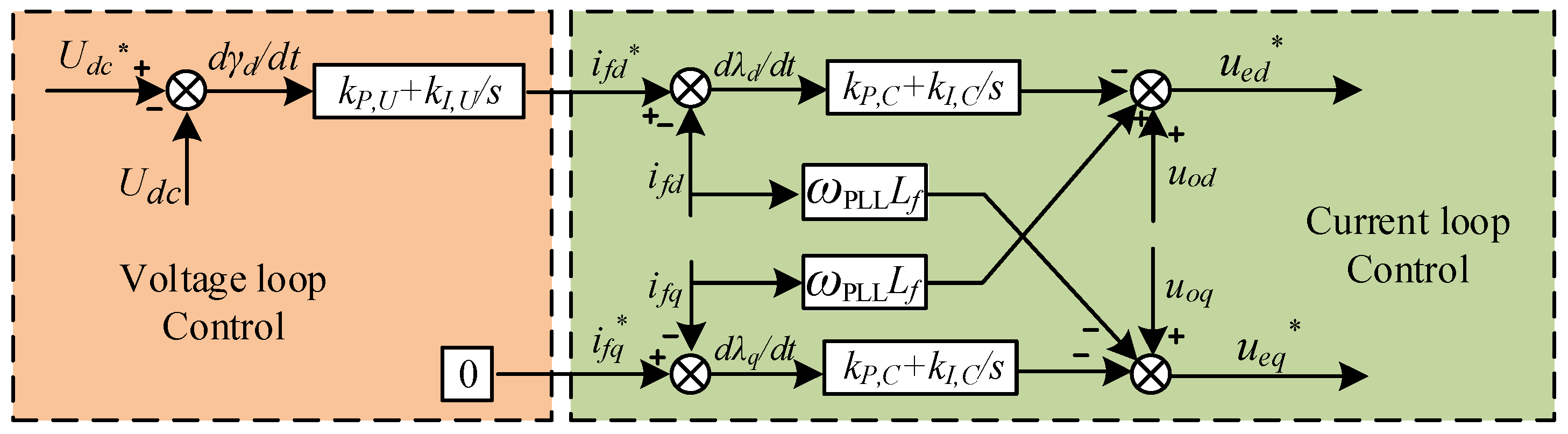
2.2. The Primary Control of VSC-Based Converter Station
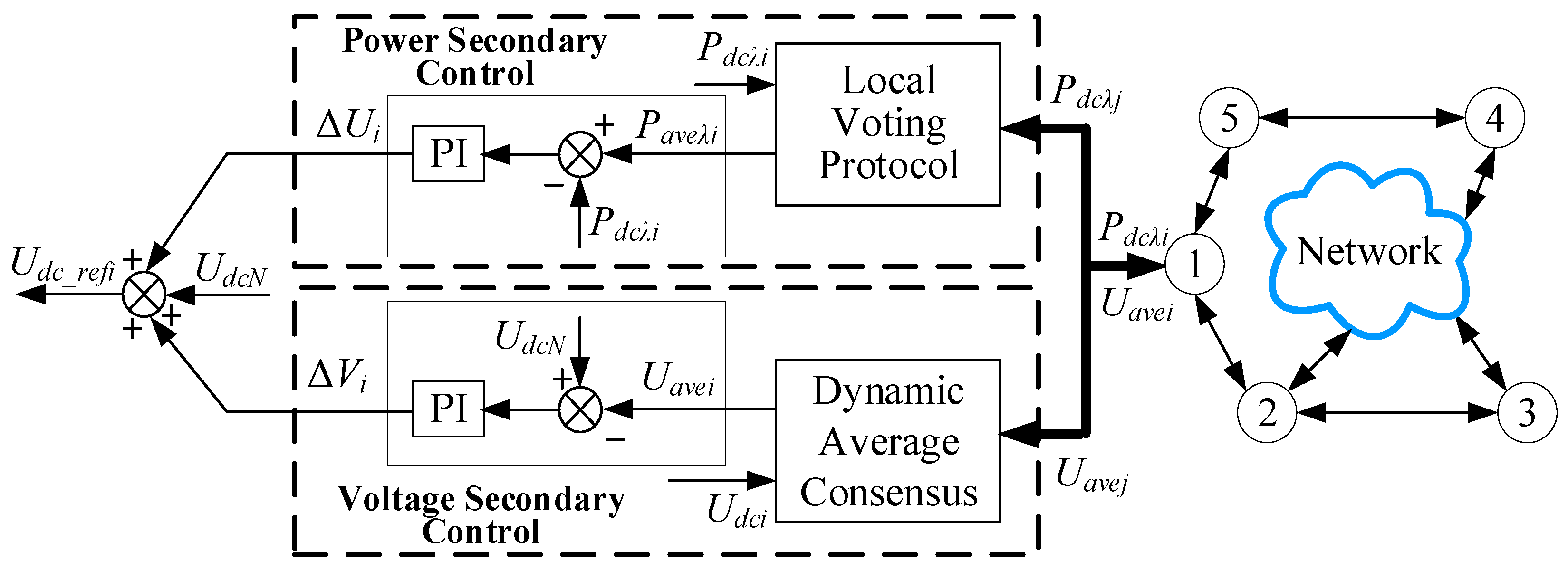
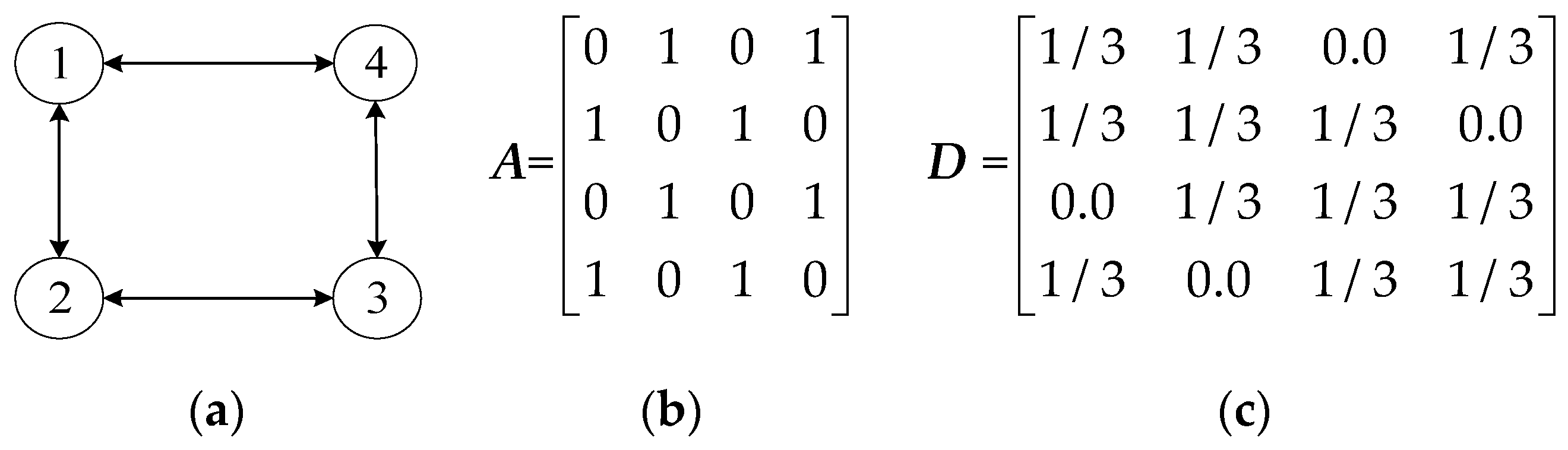
2.3. The Distributed Secondary Control for DC Distribution Network
2.4. Steady-State Analysis
3. Non-linear State-Space Model of the DC Distribution Network
3.1. State-Space Model of the Individual Converter Station with Primary Control
- Phase Locked Loop Equations
- Input Filter Equations
- AC Connection Line Equations
- Converter Equations
- DC Connection Line Equations
- Power Calculator
- Voltage and Current Loop Control
3.2. State-Space Model of the Distributed Secondary Control
3.3. State-Space Model of the DC Distribution Line and Load
- DC Distribution Line Equations
- Constant Power Load Equations
4. Small-Signal Model of the DC Distribution Network Based on Distributed Secondary Control
4.1. Small-Signal Model of the DC Distribution Lines and Loads
4.2. Small-Signal Model of the Multiple Converter Stations
4.3. Small-Signal Model of the Proposed Distributed Secondary Control
4.4. Verification of the Established Small-Signal Model
5. Small-Signal Stability Analysis
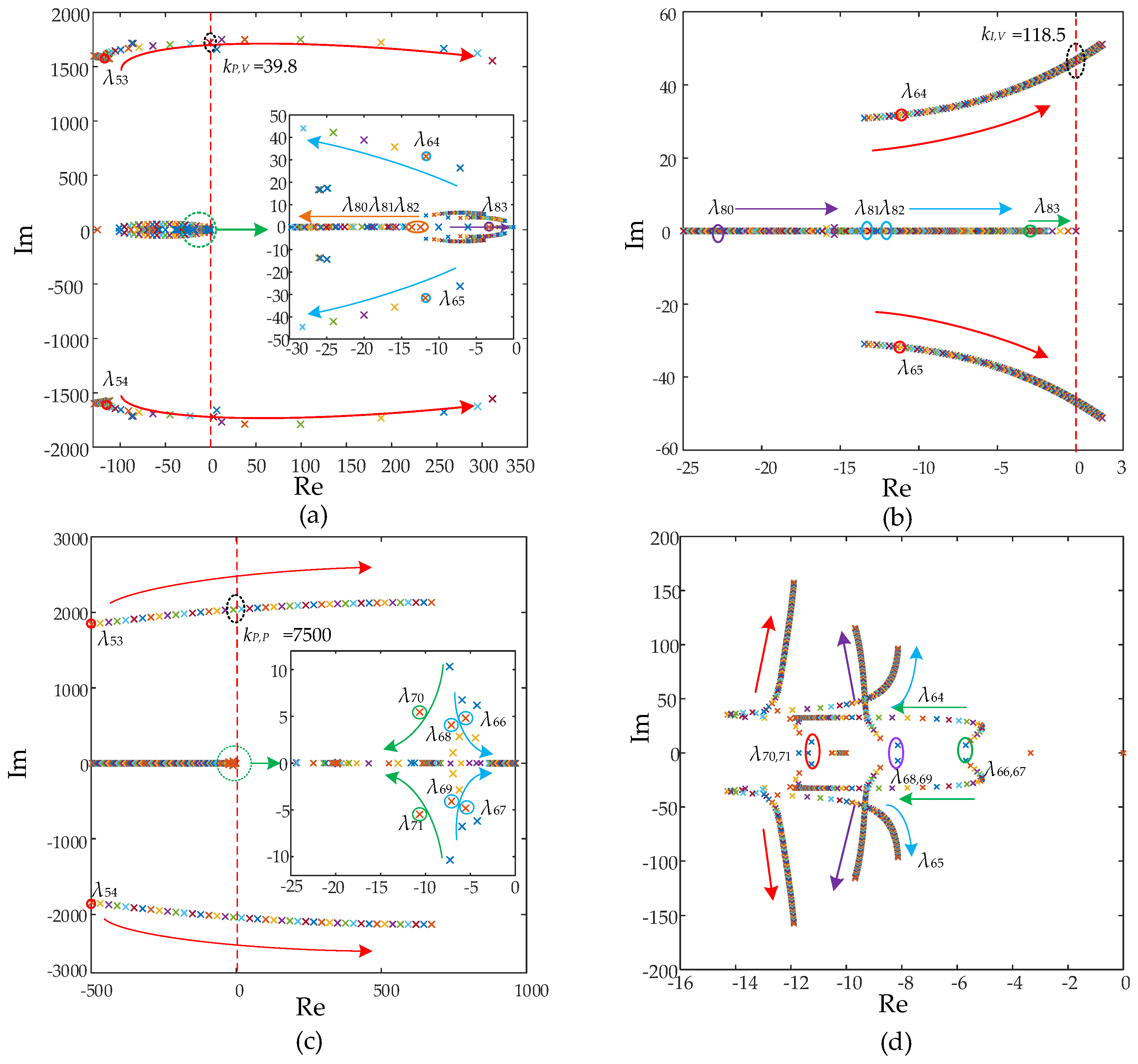
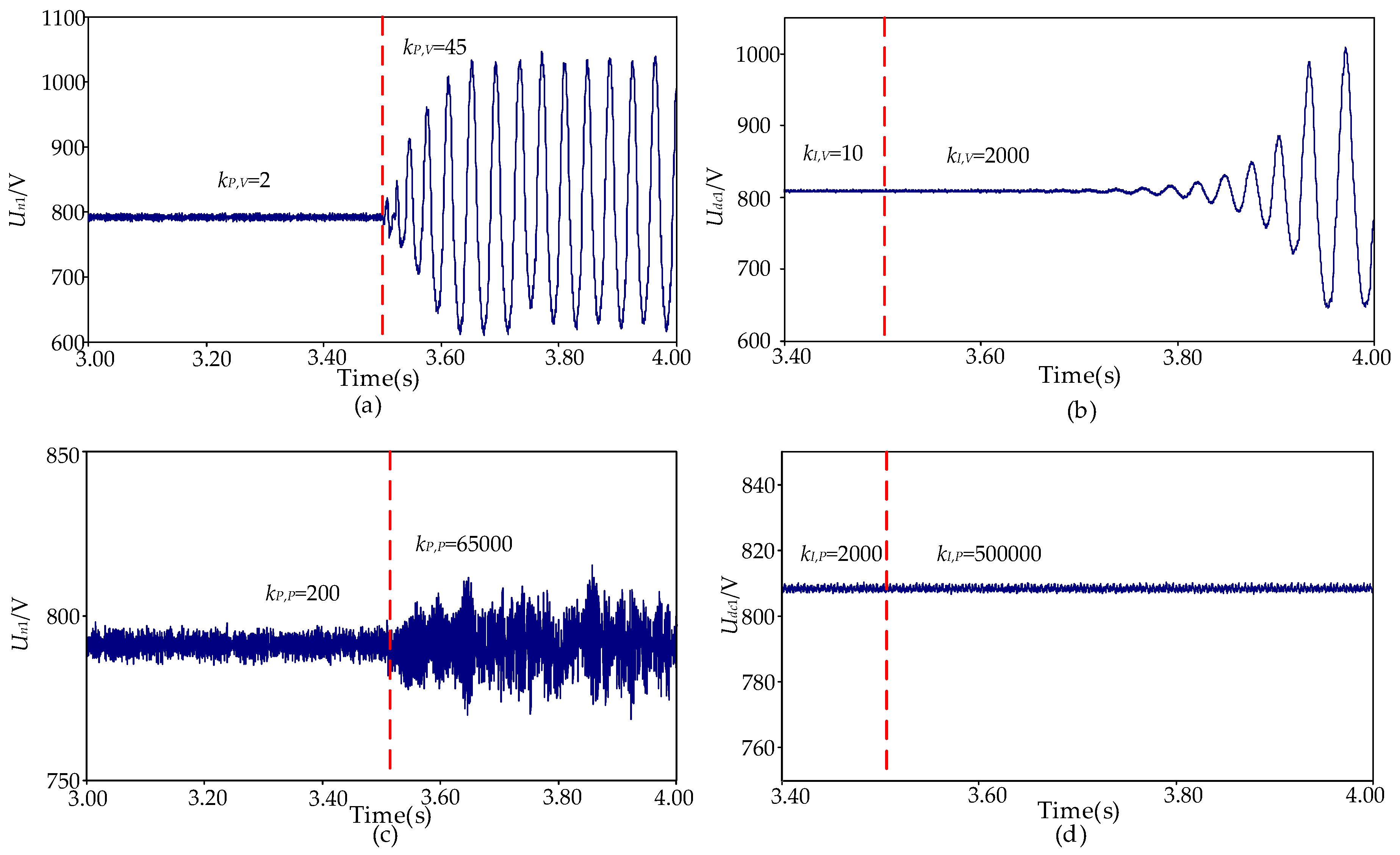
5.1. Distributed Secondary Controller Effect
- The augment of kP,V and kI,V may decrease the relative damping with low-frequency eigenvalues, which goes against the system stability. Too large a value of kP,V and kI,V can cause low-frequency oscillation in the multi-terminal LVDC distribution network.
- Within the range of system stability, the gradual increase of kI,P will decrease the damping ratio of the low-frequency eigenvalues. Furthermore, system also has the possibility of losing stability in the condition of large value of kP,P.
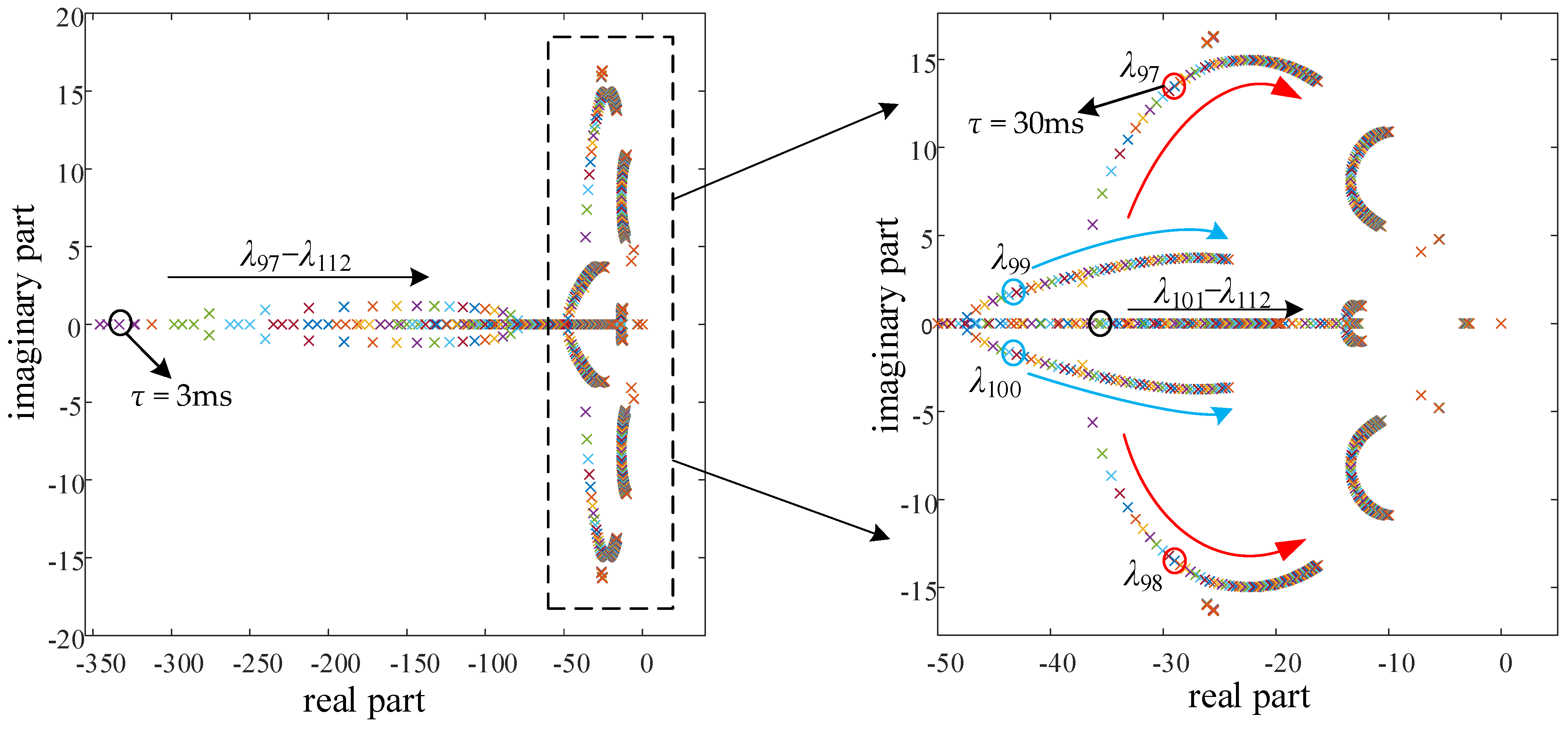
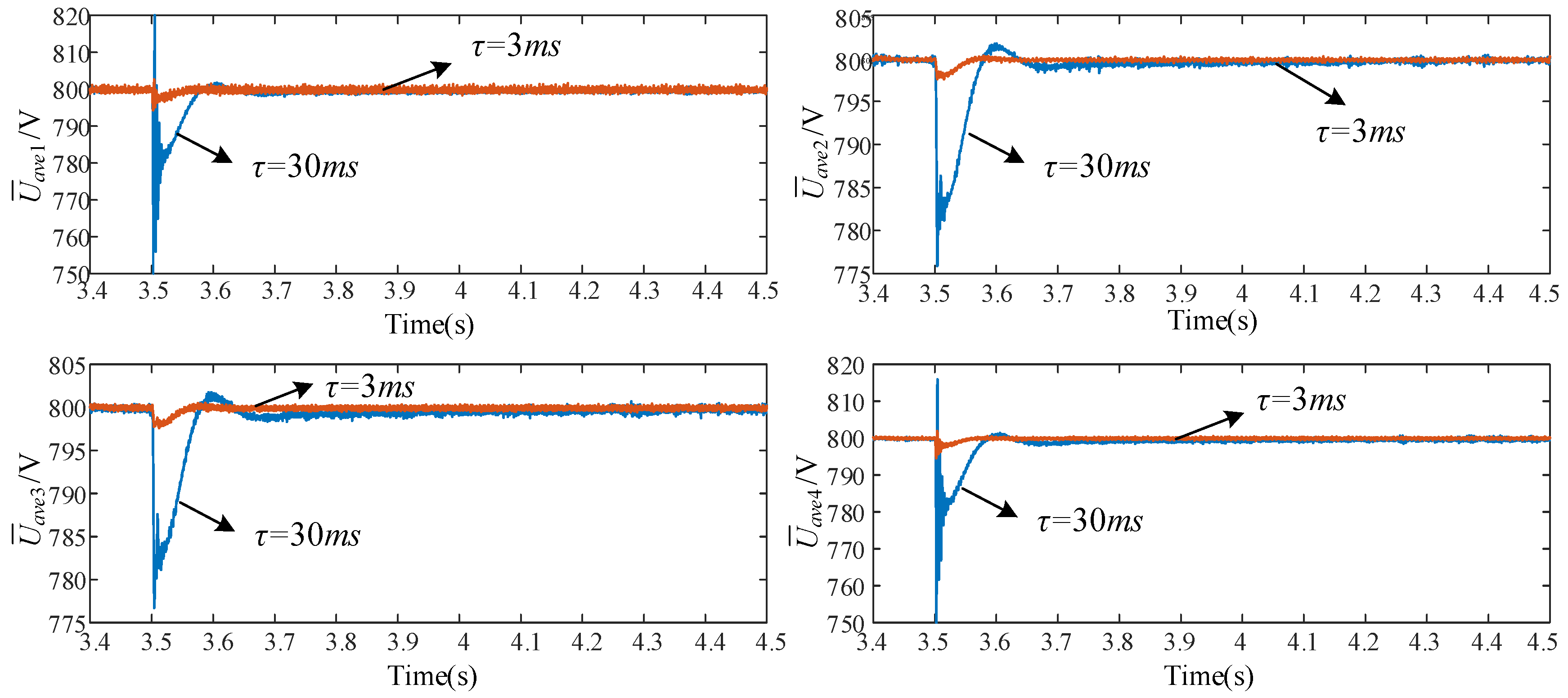
5.2. Time Delay Effect
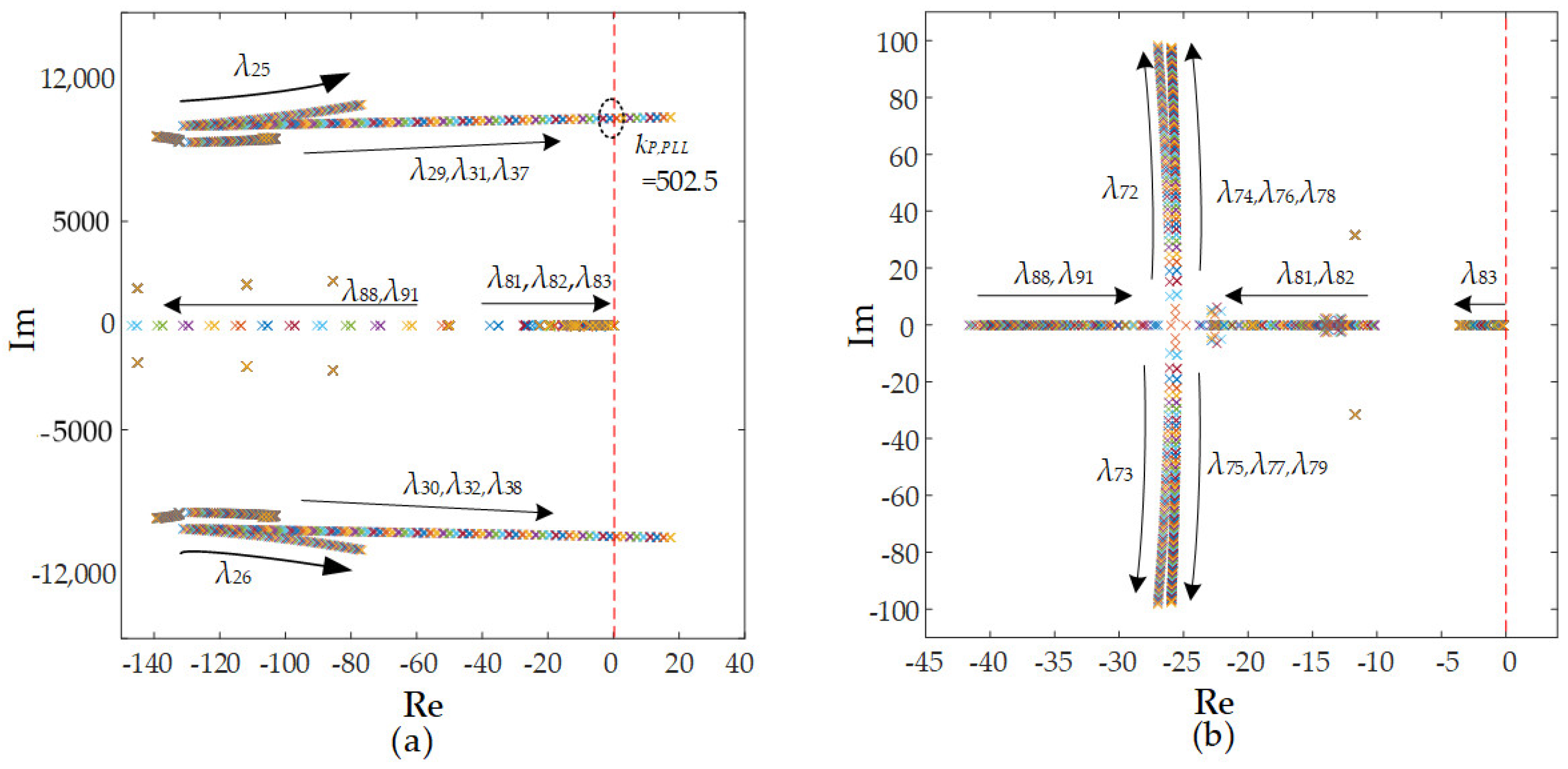
5.3. Phase Locked Loop Effect
- The augment of kP,PLL has an important effect on the medium damped modes. Too large a value of kP,PLL can cause an unstable state of system.
- The parameter kI,PLL has something to do with the system oscillation. And the increase of kI,PLL may decrease the damping ratio with high-frequency eigenvalues without affecting the system stability.
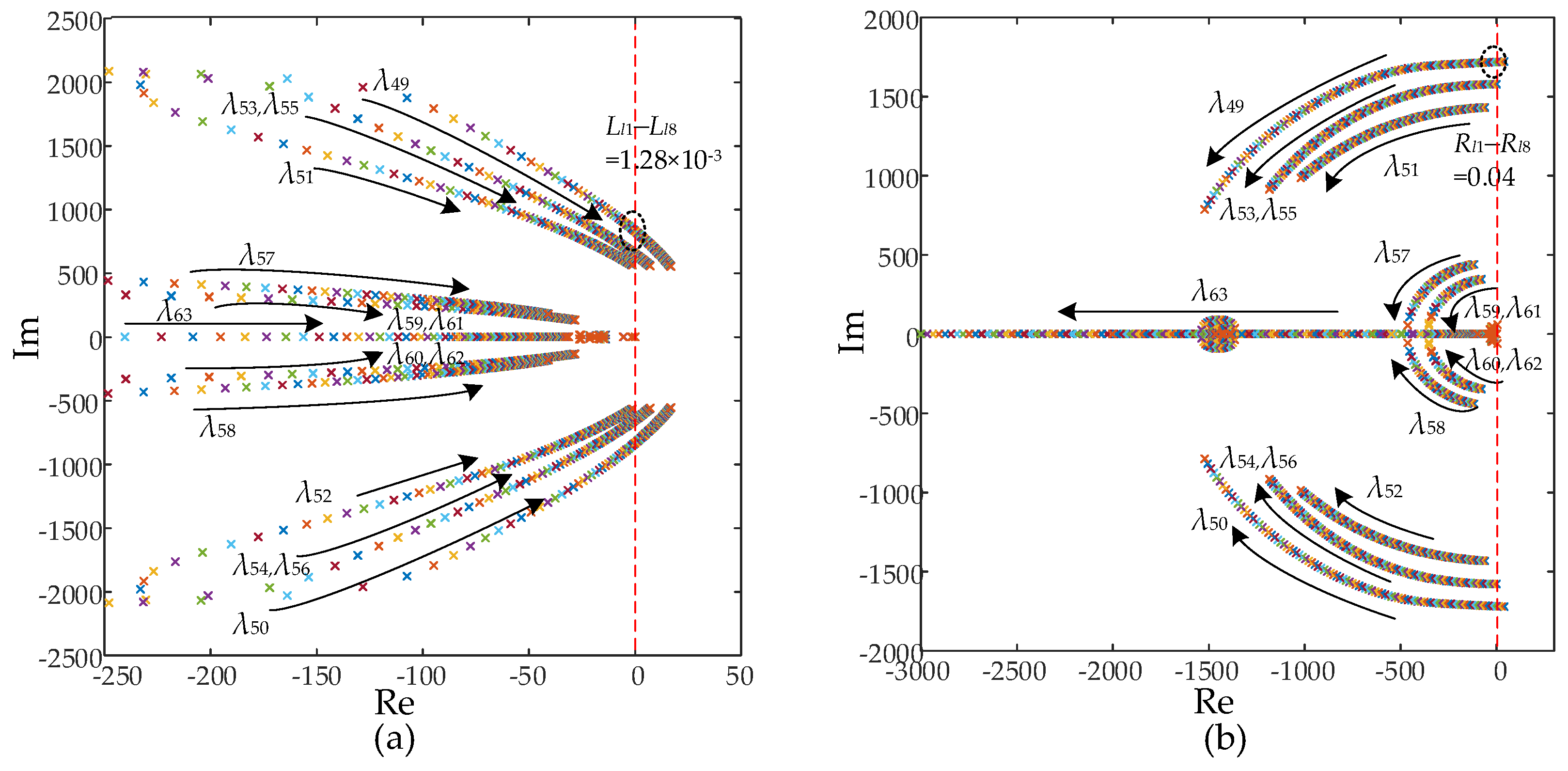
5.4. DC Distribution Line Effect
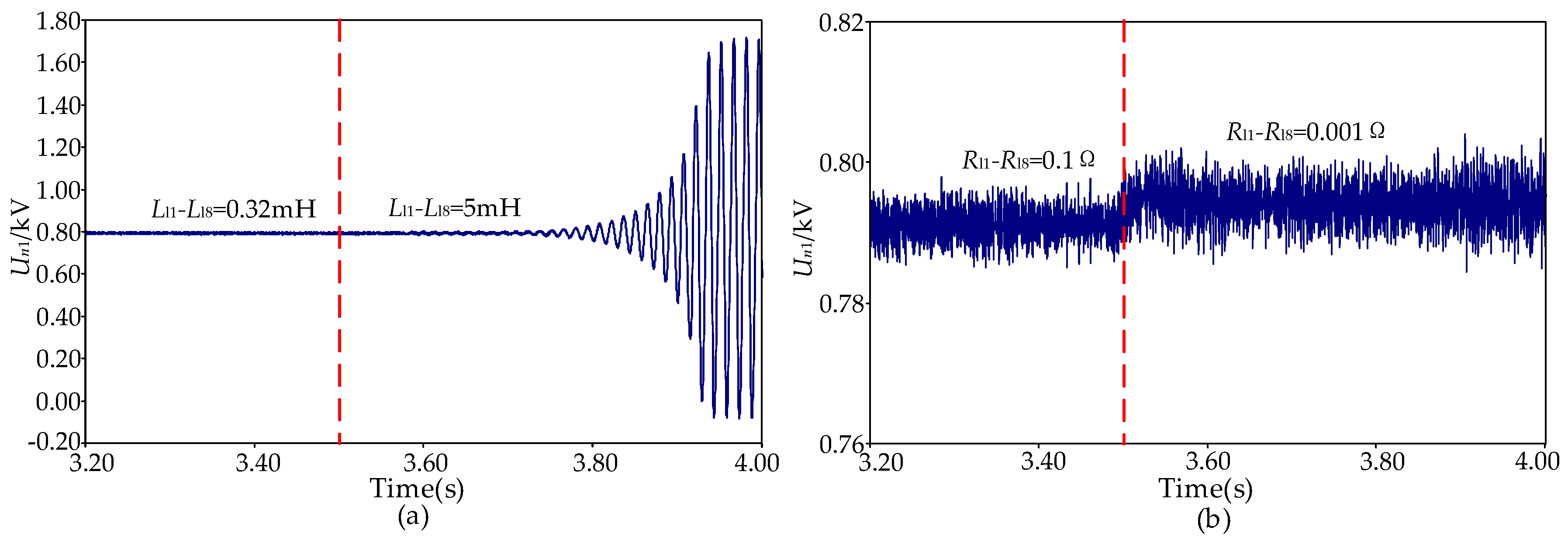
- The increase of Ll1–Ll8 has significant influences on the medium damped modes and low damped modes. Too large a value of Ll1–Ll8 can cause an unstable state of system.
- The augment of Rl1–Rl8 may increase the relative damping with low-frequency and medium-frequency eigenvalues. Too small a value of Rl1–Rl8 has a tendency of causing system to lose stability.
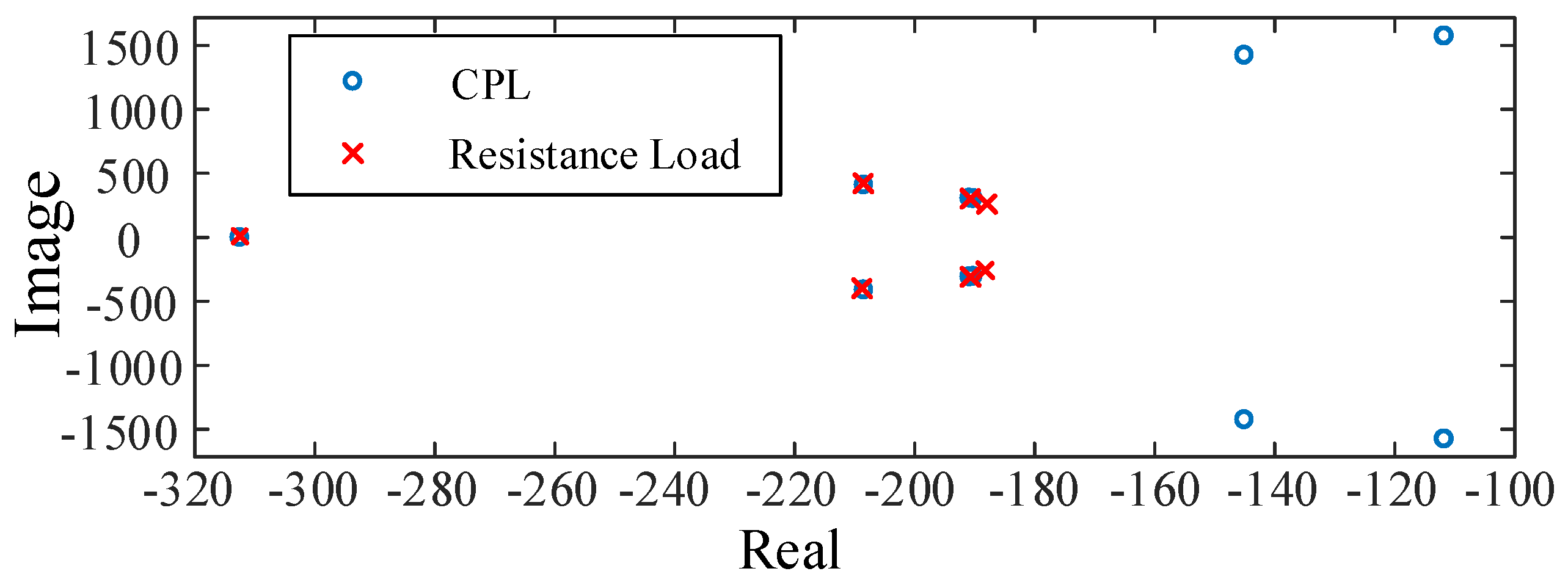
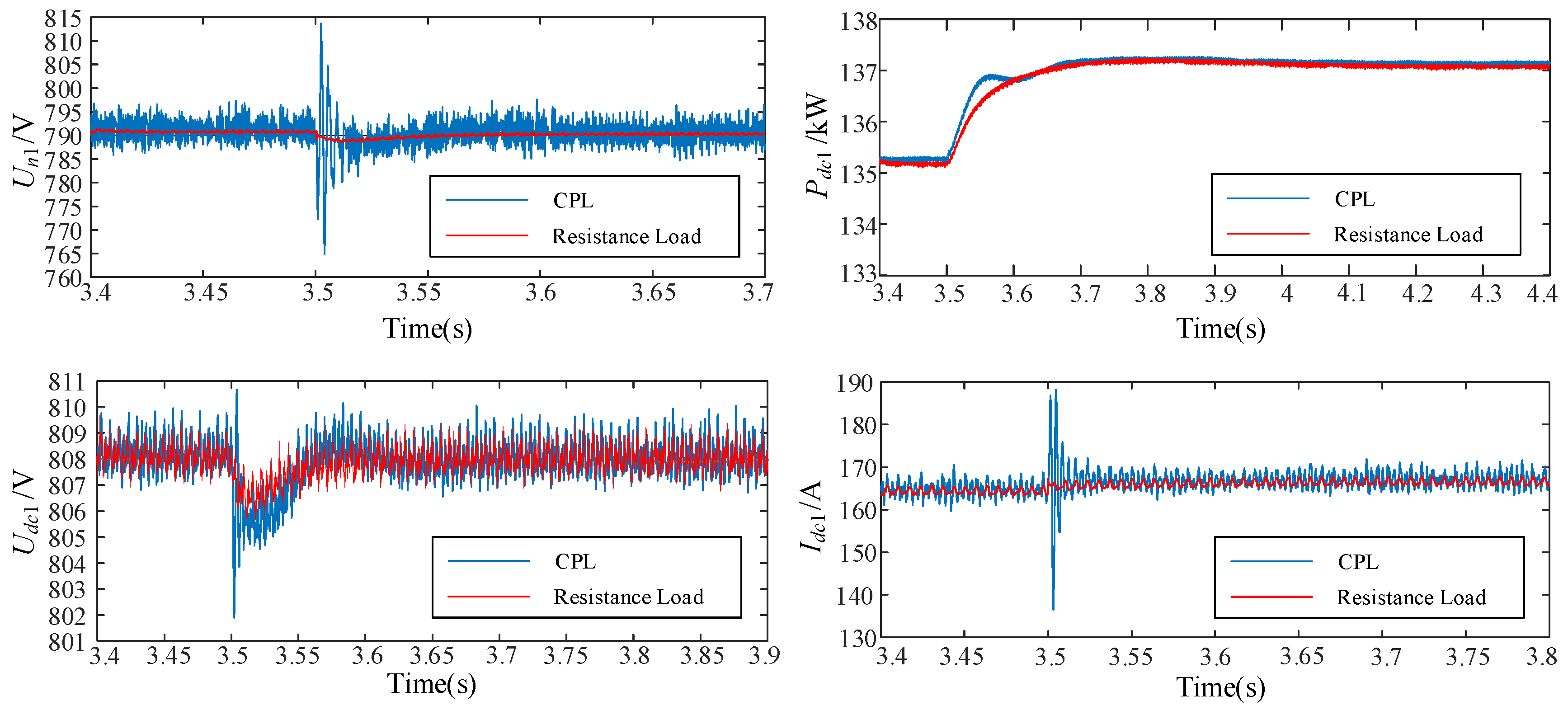
5.5. Different Load Effect
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Definition | |
| LVDC | Low Voltage Direct Current |
| DGs | Distribution Generations |
| ESSs | Energy Storage Systems |
| ALs | AC Loads |
| DLs | DC Loads |
| MPPT | Maximum Power Point Tracking |
| VSCs | Voltage Source Converters |
| WT | Wind Turbine |
| PV | Photovoltaic |
| SPWM | Space Vector Pulse Width Modulation |
| PI | Proportional-Integral |
| PLL | Phase Locked Loop |
| CPL | Constant Power Load |
Appendix A
Appendix B
Appendix C
References
- Jiang, D.; Zheng, H. Research Status and Developing Prospect of DC Distribution Network. Autom. Electr. Power Syst. 2012, 36, 98–104. [Google Scholar]
- Du, Y.; Jiang, D.; Yin, R. Topological Structure and Control Strategy of DC Distribution Network. Electr. Power Autom. Equip. 2015, 35, 139–145. [Google Scholar]
- Song, Q.; Zhao, B.; Liu, W. An Overview of Research on Smart DC Distribution Power Network. Proc. CSEE 2013, 33, 9–19. [Google Scholar]
- Luo, Y.; Li, Y.; Wang, P. Time-Domain Analysis of P-V Characteristic for Droop Control Strategy of VSC-MTDC Transmission System. Trans. China Electrotech. Soc. 2014, 29, 408–415. [Google Scholar]
- Luo, Y.; Li, Y.; Wang, P. DC Voltage Adaptive Droop Control of Multi-Terminal HVDC Systems. Proc. CSEE 2016, 36, 919–2599. [Google Scholar]
- Tang, G.; Xu, Z.; Liu, S. A Novel DC Voltage Control Strategy for VSC-MTDC Systems. Autom. Electr. Power Syst. 2013, 37, 125–132. [Google Scholar]
- He, J.; Wang, Z.; Luo, G. Voltage and Power Layered Distributed Control Strategy for VSC-MTDC Systems. Power Syst. Technol. 2018, 42, 3951–3959. [Google Scholar]
- Jiang, W.; Fahimi, B. Active Current Sharing and Source Management in Fuel Cell-Battery Hybrid Power System. IEEE Trans. Ind. Electron. 2010, 57, 752–761. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, Z.; Yu, X. Control Strategies for Battery/Supercapacitor Hybrid Energy Storage Systems. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; pp. 1–6. [Google Scholar]
- Lee, J.O.; Kim, Y.S.; Moon, S.I. Novel Supervisory Control Method for Islanded Droop-Based AC/DC Microgrids. IEEE Trans. Power Syst. 2019, 34, 2140–2151. [Google Scholar] [CrossRef]
- Yang, S.; Wang, C.; Li, J. Centralized-Distributed Control Strategies in DC Distribution Network. Power Syst. Technol. 2016, 40, 3073–3080. [Google Scholar]
- Olivares, D.E. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Tah, A.; Das, D. An Enhanced Droop Control Method for Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC Microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1194–1204. [Google Scholar] [CrossRef]
- Kang, X.; Ma, X.; Qu, X.; Wang, X. Hierarchical Coordination Control in DC Distribution System. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 1153–1157. [Google Scholar]
- Cheng, Z.; Duan, J.; Chow, M. To Centralize or to Distribute: That Is the Question: A Comparison of Advanced Microgrid Management Systems. IEEE Ind. Electron. Mag. 2018, 12, 6–24. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Le, J.; Zhou, Q.; Wang, C. Research on Optimal Control Method of Distribution Network Voltage and Power Based on Distributed Collaboration. Proc. CSEE 2020, 40, 1249–1257. [Google Scholar]
- Jena, S.; Padhy, N.P. A Reverse Droop Based Distributed Control Framework for DC Distribution Systems. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Abessi, A.; Vahidinasab, V.; Ghazizadeh, M.S. Centralized Support Distributed Voltage Control by Using End-Users as Reactive Power Support. IEEE Trans. Smart Grid 2015, 7, 178–188. [Google Scholar] [CrossRef]
- Gao, X.; Meng, K.; Dong, Z. Cooperation-Driven Distributed Control Scheme for Large-Scale Wind Farm Active Power Regulation. IEEE Trans. Energy Convers. 2017, 32, 1240–1250. [Google Scholar] [CrossRef]
- Simiyu, P.; Xin, A.; Bitew, G.T.; Shahzad, M.; Kunyu, W.; Kamunyu, P.M. Small-Signal Stability Analysis for the Multi-Terminal VSC MVDC Distribution Network; a Review. J. Eng. 2019, 2019, 1068–1075. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef] [Green Version]
- Hu, D.; Peng, Y.G.; Wei, W.; Hu, Y.L. Distributed Secondary Control for State of Charge Balancing with Virtual Impedance Adjustment in a DC Microgrid. Energies 2020, 13, 408. [Google Scholar] [CrossRef] [Green Version]
- Anand, S.; Fernandes, B.G. Reduced-Order Model and Stability Analysis of Low-Voltage DC Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 5040–5049. [Google Scholar] [CrossRef]
- Garcés, A.; Herrera, J.; Gil-González, W.; Montoya, O. Small-Signal Stability in Low-Voltage DC-Grids. In Proceedings of the 2018 IEEE ANDESCON, Santiago de Cali, Colombia, 22–24 August 2018; pp. 1–5. [Google Scholar]
- Lin, P.F.; Zhao, T.Y.; Wang, B.F.; Wang, Y.; Wang, P. A Semi-Consensus Strategy toward Multi-Functional Hybrid Energy Storage System in DC Microgrids. IEEE Trans. Energy Convers. 2020, 35, 336–346. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Shotorbani, A.M.; Wang, L.W.; Li, W. Distributed Voltage Regulation and Automatic Power Sharing in Multi-Terminal HVDC Grids. IEEE Trans. Power Syst. 2020, 35, 3739–3752. [Google Scholar] [CrossRef]
- Kalcon, G.O.; Adam, G.P.; Anaya-Lara, O.; Lo, S.; Uhlen, K. Small-Signal Stability Analysis of Multi-Terminal VSC-Based DC Transmission Systems. IEEE Trans. Power Syst. 2012, 27, 1818–1830. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M. Impedance Based Stability Analysis of VSC-based HVDC System. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar]
- Shamsi, P.; Fahimi, B. Stability Assessment of a DC Distribution Network in a Hybrid Micro-Grid Application. IEEE Trans. Smart Grid 2014, 5, 2527–2534. [Google Scholar] [CrossRef]
- Guan, R.; Deng, N.; Xue, Y.; Zhang, X. Small-Signal Stability Analysis of the Interactions between Voltage Source Converters and DC Current Flow Controllers. IEEE Open Access J. Power Energy 2020, 7, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Wei, T.; Huo, Q.; Zhang, T.; He, J. The Small Signal Stability Analysis of DC Distribution Network. In Proceedings of the IET, 8th Renewable Power Generation Conference, Shanghai, China, 24–25 October 2019; pp. 1–7. [Google Scholar]
- Gu, H.; Jiao, Z. Comprehensive Small-Signal Model and Stability Analysis of VSC-based Medium-Voltage DC Distribution System. IET Gener. Transm. Distrib. 2019, 13, 4642–4649. [Google Scholar] [CrossRef]
- Xie, D.; Chen, A.; Yu, S. Integrated Dispatching Index and Scheduling Strategy of Flexible DC Distribution Network Based on Droop Control. Proc. CSEE 2019, 39, 2828–2840. [Google Scholar]
- Xie, D.; Chen, A.; Yu, S. Steady-State Analysis of DC Distribution Network Based on Droop Characteristic Adjustment. Proc. CSEE 2018, 38, 3516–3528. [Google Scholar]
- Golsorkhi, M.S.; Hill, D.J.; Karshenas, H.R. Distributed Voltage Control and Power Management of Networked Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1892–1902. [Google Scholar] [CrossRef]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed cooperative control of dc microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Blaabjerg, F.; Chen, Z. Harmonic Instability Assessment Using State-Space Modeling and Participation Analysis in Inverter-Fed Power Systems. IEEE Trans. Ind. Electron. 2017, 64, 806–816. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Secondary Control Methods | Advantages | Disadvantages |
|---|---|---|
| Centralized control | High control accuracy | Poor reliability, scalability |
| Decentralized control | High reliability, scalability | Poor control accuracy |
| Distributed control | High reliability, scalability, accuracy | Complicated control scheme |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rf/mΩ | 2 | Lf/mH | 2 |
| Cf/uF | 50 | UdcN/V | 800 |
| ed/V | 311 | eq/V | 0 |
| k1 | 0.44 | k2, k3, k4 | 0.88 |
| PN1/kW | 180 | PN2, PN3, PN4/kW | 90 |
| Ldc1~Ldc4/mH | 0.1 | Rdc1~Rdc4/mΩ | 50 |
| Cdc1~Cdc4/F | 0.02 | Cb1~Cb4/uF | 50 |
| Rc1~Rc4/mΩ | 50 | Cn1~Cn4/mF | 2 |
| Lc1~Lc4/mH | 0.2 | R1~R4/Ω | 0.6 |
| Ll1~Ll8/mH | 0.32 | Rl1~Rl8/Ω | 0.1 |
| LD1~LD4/mH | 3 | CD1~CD4/mF | 3 |
| ωo/rad/s | 314 | ωc/Hz | 50 |
| kP,U | 0.3 | kI,U | 15 |
| kP,C | 10 | kI,C | 10,000 |
| kP,V | 2 | kI,V | 10 |
| kP,P | 200 | kI,P | 2000 |
| kP,PLL | 50 | kI,PLL | 900 |
| Mode | Re | Im | Frequency (Hz) | Damping Ratio | Major Participants |
|---|---|---|---|---|---|
| λ1, λ2 | −3116.8, −1483.5 | 0 | 0 | 1.0 | λd1, ifd1 |
| λ3 | −3359.5 | 0 | 0 | 1.0 | ifd2, ifd3, ifd4 |
| λ4 | −3245.7 | 0 | 0 | 1.0 | ifd2, ifd3, ifd4, λd3 |
| λ5, λ6 | −3292.8, −1450.4 | 0 | 0 | 1.0 | ifd2, λd2, ifd4, λd4 |
| λ7, λ8 | −3571.2, −1388.5 | 0 | 0 | 1.0 | ifq1, λq1 |
| λ9, λ10, λ11 | −3596.6 | 0 | 0 | 1.0 | ifq2, ifq3, ifq4, λq2, λq4 |
| λ12 | −1460.4 | 0 | 0 | 1.0 | ifd3, λd1, λd3 |
| λ13 | −1434.8 | 0 | 0 | 1.0 | ifd2, λd2, ifd3, λd3, ifd4, λd4 |
| λ14, λ15, λ16 | −1384.7 | 0 | 0 | 1.0 | ifq4, λq2, λq3, λq4 |
| λ17,18, λ19,20 λ21,22, λ23,24 | −213.5 | ±18,068.4 | 2876 | 0.01 | Ub1~Ub4 Idc1~Idc4 |
| λ25,26 λ27,28 | −127.2 −132.2 | ±10,359.0 ±9725.9 | 1648.7 1547.9 | 0.01 0.01 | uod1, uoq1 iod_G1, ioq_G1 |
| λ29,30, λ31,32 λ33,34 λ35,36 | −120.5 −122.2 −123.9 | ±10,333.5 ±9705.4 ±9704.9 | 1644.6 1544.7 1544.6 | 0.01 0.01 0.01 | uod3, uoq3 iod_G3, ioq_G3 |
| λ37,38 λ39,40 | −120.2 −123.0 | ±10,333.4 ±9705.1 | 1644.6 1544.7 | 0.01 0.01 | uod2, uoq2, iod_G2, ioq_G2 uod4, uoq4, iod_G4, ioq_G4 |
| λ41,42 λ43,44, λ45,46 λ47,48 | −338.6 −328.8 −319.9 | ±2149.0 ±2131.0 ±2120.5 | 342 339.2 337.5 | 0.16 0.15 0.15 | UL1~UL4 IL1~IL4 |
| λ49,50 | −85.5 | ±1714.1 | 272.8 | 0.05 | Un1~Un4 Il1~Il8 |
| λ51,52 λ53,54, λ55,56 | −145.1 −111.8 | ±1424.3 ±1574.2 | 226.7 250.5 | 0.1 0.07 | Un1~Un4 |
| λ57,58 | −208.9 | ±410.7 | 65.4 | 0.45 | Udc1~Udc4 |
| λ59,60 | −191.1 | ±307.4 | 48.9 | 0.53 | Udc1, Udc3 |
| λ61,62 | −190.5 | ±304.2 | 48.4 | 0.53 | Udc2, Udc4 |
| λ63 | −312.5 | 0 | 0 | 1.0 | Il1~Il8 |
| λ64,65 | −11.7 | ±31.5 | 5.0 | 0.35 | Udc1~Udc4, γd1~γd4 |
| λ66,67 | −5.5 | ±4.8 | 0.8 | 0.75 | Φp1, Φp3, γd1, γd3 |
| λ68,69 | −7.1 | ±4.1 | 0.7 | 0.87 | Φp2, Φp4, γd2, γd4 |
| λ70,71 | −10.7 | ±5.5 | 0.9 | 0.89 | Φp3, γd3 |
| λ72,73 | −26.1 | ±16.0 | 2.5 | 0.85 | z1, δPLL1 |
| λ74,75, λ76,77, λ78,79 | −25.5 | ±16.3 | 2.6 | 0.84 | z2, δPLL2, z3, δPLL3, z4, δPLL4 |
| λ80 | −22.8 | 0 | 0 | 1.0 | Ues1~Ues4, γd2~γd4 |
| λ81 | −13.8 | 0 | 0 | 1.0 | Ues2, Ues4, γd2, γd4 |
| λ82 | −12.7 | 0 | 0 | 1.0 | Ues1, Ues3, γd1, γd3 |
| λ83 | −3.3 | 0 | 0 | 1.0 | Φv1~Φv4 |
| λ84, λ85, λ86, λ87 | −19.5 | 0 | 0 | 1.0 | X1~X4 |
| λ88 | −50 | 0 | 0 | 1.0 | Pdc3, Pdc4, γd3, γd4 |
| λ89,90 | −50 | ±1.3 | 0.2 | 1.0 | Pdc2, Pdc4 |
| λ91 | −50 | 0 | 0 | 1.0 | Pdc1, Pdc3 |
| λ92,93, λ94, λ95,96 | 0 | 0 | / | / | Ues1, Ues3, Φv1, Φv3, Φv4, Φp3 |
| Mode | Re | Im | Frequency (Hz) | Damping Ratio | Major Participants |
|---|---|---|---|---|---|
| λ97 | −345.6 | 0 | 0 | 1.0 | ~, Δ, Δ |
| λ98 | −340.8 | 0 | 0 | 1.0 | Δ, ~Δ |
| λ99 | −323.4 | 0 | 0 | 1.0 | ~ |
| λ100 | −323.9 | 0 | 0 | 1.0 | Δ, ~Δ |
| λ101,102 | −333.3 | ±0.0 | 0 | 1.0 | Δ, Δ |
| λ103,104, λ105,106 | −333.3 | ±0.0 | 0 | 1.0 | Δ, Δ, , |
| λ107,108 | −333.3 | ±0.0 | 0 | 1.0 | , |
| λ109 | −333.3 | ±0.0 | 0 | 1.0 | Δ, Δ |
| λ110 | −333.3 | ±0.0 | 0 | 1.0 | |
| λ111 | −333.3 | ±0.0 | 0 | 1.0 | Δ, Δ, , |
| λ112 | −333.3 | ±0.0 | 0 | 1.0 | , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Zhou, M.; Wang, Q.; Hu, W. Small-Signal Stability Analysis for Multi-Terminal LVDC Distribution Network Based on Distributed Secondary Control Strategy. Electronics 2021, 10, 1575. https://doi.org/10.3390/electronics10131575
Lv Z, Zhou M, Wang Q, Hu W. Small-Signal Stability Analysis for Multi-Terminal LVDC Distribution Network Based on Distributed Secondary Control Strategy. Electronics. 2021; 10(13):1575. https://doi.org/10.3390/electronics10131575
Chicago/Turabian StyleLv, Zhenyu, Min Zhou, Qi Wang, and Wenqiang Hu. 2021. "Small-Signal Stability Analysis for Multi-Terminal LVDC Distribution Network Based on Distributed Secondary Control Strategy" Electronics 10, no. 13: 1575. https://doi.org/10.3390/electronics10131575
APA StyleLv, Z., Zhou, M., Wang, Q., & Hu, W. (2021). Small-Signal Stability Analysis for Multi-Terminal LVDC Distribution Network Based on Distributed Secondary Control Strategy. Electronics, 10(13), 1575. https://doi.org/10.3390/electronics10131575