
IoT Device for Sitting Posture Classification Using Artificial Neural Networks

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Related Works
3. Materials and Methods
3.1. Internet of Thing
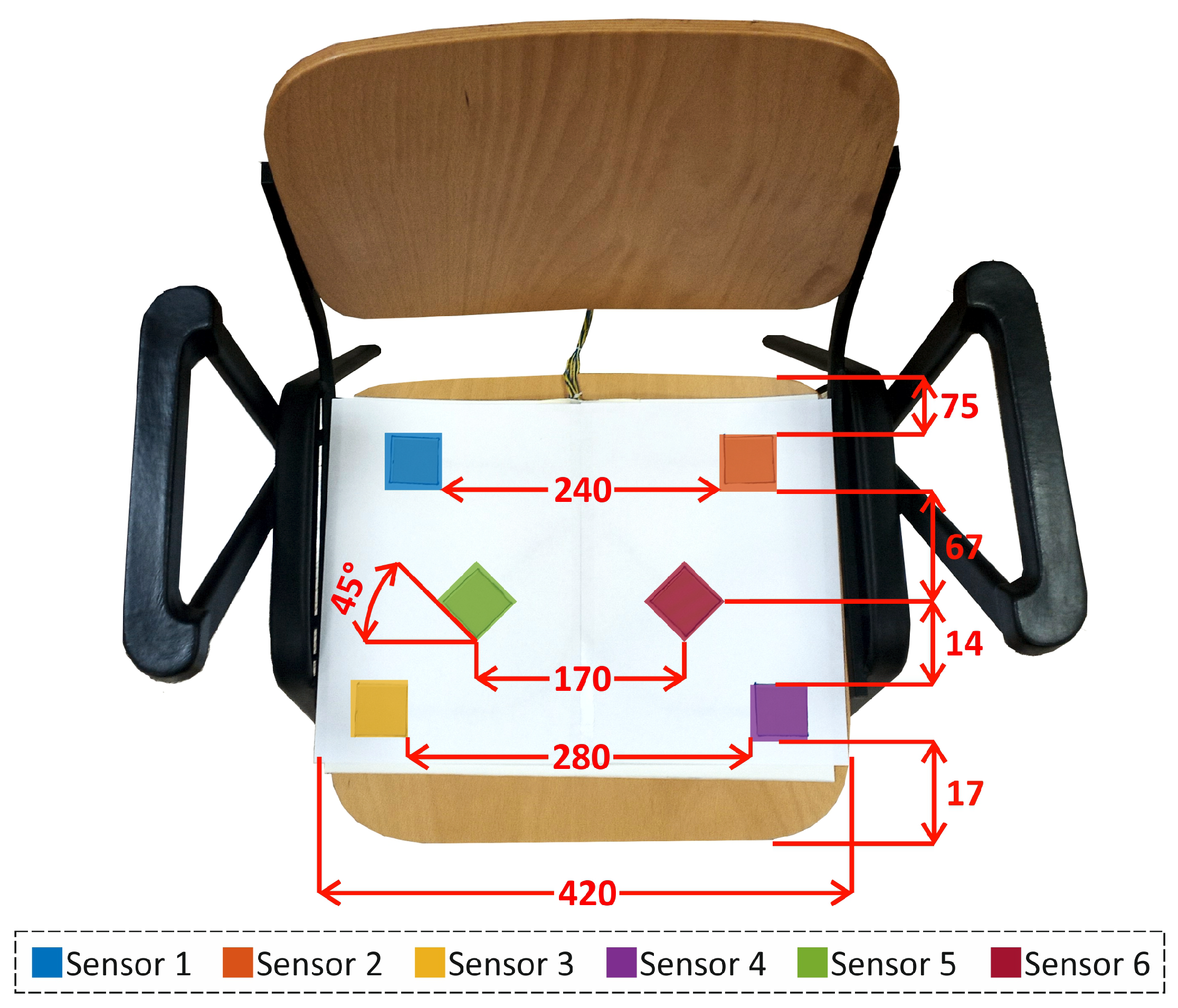
- The sensor seat: For measuring changes in force distribution, 6 FSR were used. This kind of force sensor has been widely used in similar studies, alone or in combination with inertial measurement unit (IMU) sensors, for measuring changes in body weight distribution when standing or moving [42,43,44] but also when sitting [37,40]. The selected FSRs (FSR01CE, Ohmite®) have a sensing range from circa 20 g to 5 kg and an active area of 39.70 × 39.70 mm and were fixed to a hard chair’s seat following the distribution shown in Figure 1. The sensors were set by observation, in a way that they covered most of the low part of the body in contact with the seat for all participants. Since the aim is to develop a simple, versatile, non-intrusive way of detecting posture changes, no other sensors like IMUs were used and no sensor was placed either in the user nor in the backrest or the armrests of the chair, like previous studies did [37]. A soft seat pillow was placed over the sensors for a homogeneous distribution of weight and as a protector of the sensors and wiring, which are quite fragile. If the pillow is not used, the measuring was the same but then the wiring was in direct contact with the user, which may cause damage to the device. Five different thickness and density pillows were tested, so the one used was selected in a trial and error procedure: The pillow selected was the one which, being thick enough to prevent the sensors and wiring from being damaged, did not change the measurements. A thicker or harder pillow prevented the sensors from detecting some weight variations, while a softer pillow was not enough to protect the device. The sensors were wired to a custom designed printed circuit board (PCB) input containing a simple voltage divider and a operational amplifier in non amplifying buffer configuration for each sensor, as shown in Figure 2.
- The microcontroller unit (MCU): The custom PCB output was wired to the Analog-to-Digital Converter (ADC) entry-pins of a NUCLEO-F411RE STM32 Nucleo-64 development board, and a proper firmware was developed for gathering, handling and then sending this data via Bluetooth to a PC host. This board contains a STM32F411RE ARM Cortex-M4 core manufactured by ST®, which offers one 12-bit ADC with up to 16 channels. In addition, although this has not been implemented yet, this MCU was chosen because of the easy ANN integration capabilities the manufacturer offers, so in the future the device itself could do the posture classification on board in real time with no need of external computing. This has proven to be better in terms of fast response, enhanced portability, and energy saving by previous studies [43,45]. A Bluetooth Low Energy (BLE) expansion board was also attached to the NUCLEO-F411RE for communication purposes. Using the BLE protocol means less power consumption is needed, so a future revision of the device could run on batteries for a long time.
- The personal computer (PC) application: A user-friendly interface was designed to show measurements from the sensors and logging the data for further use. The application was developed in javascript and using the node.js and vue.js frameworks, as well as a heat map graphic representation library. The application is run through the browser and it guides the user for obtaining data for each different posture. It also uses promise-based calls both to request MCU pairing and to request sensor values, using the BLE protocol. A heat-map type representation was used to visualize the changes in the sensors in real time, as shown in Figure 3.
3.2. Dataset
3.2.1. Considered Postures and Participants
3.2.2. Acquisition Process
3.3. ANN-Based Machine Learning Classifier
3.4. Evaluation Metrics
- Sensitivity (Recall) refers to the proportion of TP in all the cases that belong to this class (see Equation (2)).
- Specificity is the proportion of TN in all cases that do not belong to this class (see Equation (3)).
- Precision refers to the proportion of TP in all cases that have been classified as it (see Equation (4)).
- F1 score considers both the precision and the sensitivity (recall) of the test to compute the score. It is the harmonic mean of both parameters (see Equation (5)).
4. Results and Discussion
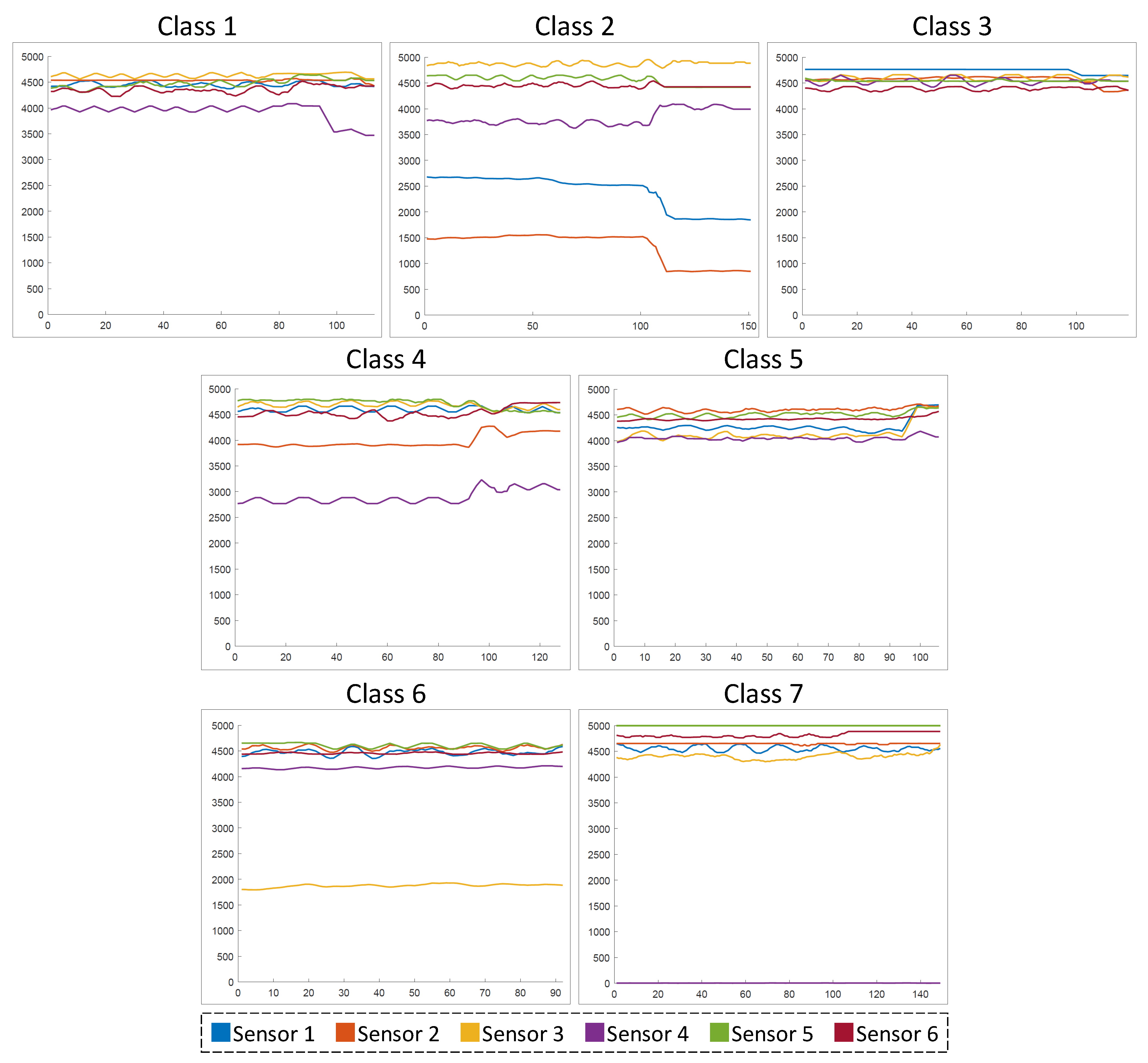
4.1. Data Processing
4.2. Classification Results
4.3. Limitations of the Study
4.4. Future Works
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| ANN | Artificial Neural Network |
| AUC | Area Under Curve |
| BLE | Bluetooth Low Energy |
| FN | False Negative |
| FP | False Positive |
| FSR | Force Sensitive Resistors |
| HL | Hidden Layers |
| IoT | Internet of Things |
| JSON | JavaScript Object Notation |
| MCU | Micro-controller Unit |
| PC | Personal Computer |
| PCB | Printed Circuit Board |
| SER | Spanish Society of Rheumatology |
| ROC | Receiver Operative Characteristic |
| TN | True Negative |
| TP | True Positive |
| VDT | Video Display Terminal |
References
- Lapointe, J.; Dionne, C.E.; Brisson, C.; Montreuil, S. Effort-reward imbalance and video display unit postural risk factors interact in women on the incidence of musculoskeletal symptoms. Work 2013, 44, 133–143. [Google Scholar] [CrossRef] [PubMed]
- Owen, N. Sedentary behavior: Understanding and influencing adults’ prolonged sitting time. Prev. Med. 2012, 55, 535–539. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; He, L.; Li, J.; Wang, J.; Wang, S. Visual display terminal use increases the prevalence and risk of work-related musculoskeletal disorders among Chinese office workers: A cross-sectional study. J. Occup. Health 2012, 54, 34–43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dick, R.B.; Lowe, B.; Ming-Lun, L.; Krieg, E.F. Further trends in work-related musculoskeletal disorders-a comparison of risk factors for symptoms using quality of work life data from the 2002, 2006 and 2010 general social survey. J. Occup. Environ. Med. Am. Coll. Occup. Environ. Med. 2015, 57, 910. [Google Scholar] [CrossRef] [Green Version]
- Cho, C.Y.; Hwang, Y.S.; Cherng, R.J. Musculoskeletal symptoms and associated risk factors among office workers with high workload computer use. J. Manip. Physiol. Ther. 2012, 35, 534–540. [Google Scholar] [CrossRef]
- Subramanian, S. Risk Factor Analysis in Sedentary Office Workers with Low Back Pain. J. Chalmeda Anand Rao Inst. Med. Sci. Vol 2017, 13, 16. [Google Scholar]
- García, A.O.; Mendiola, A.H.; de Estudio EPISER, G.; Peña, J.; Carmona, L. Impacto poblacional del dolor lumbar en España: Resultados del estudio EPISER. Revista Española de Reumatología Órgano Oficial de la Sociedad Española de Reumatología 2002, 29, 471–478. [Google Scholar]
- Vos, T.; Allen, C.; Arora, M.; Barber, R.M.; Bhutta, Z.A.; Brown, A.; Carter, A.; Casey, D.C.; Charlson, F.J.; Chen, A.Z.; et al. Global, regional, and national incidence, prevalence, and years lived with disability for 310 diseases and injuries, 1990–2015: A systematic analysis for the Global Burden of Disease Study 2015. Lancet 2016, 388, 1545–1602. [Google Scholar] [CrossRef] [Green Version]
- Soriano, J.B.; Rojas-Rueda, D.; Alonso, J.; Antó, J.M.; Cardona, P.J.; Fernández, E.; Garcia-Basteiro, A.L.; Benavides, F.G.; Glenn, S.D.; Krish, V.; et al. La carga de enfermedad en España: Resultados del Estudio de la Carga Global de las Enfermedades 2016. Med. Clín. 2018, 151, 171–190. [Google Scholar] [CrossRef]
- Wieser, S.; Horisberger, B.; Schmidhauser, S.; Eisenring, C.; Brügger, U.; Ruckstuhl, A.; Dietrich, J.; Mannion, A.F.; Elfering, A.; Tamcan, Ö.; et al. Cost of low back pain in Switzerland in 2005. Eur. J. Health Econ. 2011, 12, 455–467. [Google Scholar] [CrossRef] [Green Version]
- Gellert, F.J.; Kesselmann, M.; Wilke, C.B. Arbeitswelt im Wandel. Prävention und Gesundheitsförderung 2018, 13, 12–17. [Google Scholar] [CrossRef]
- Falcon, J.; Raul, J. Características Epidemiológicas de la Incapacidad para el Trabajo Debido a Desórdenes Músculo-Esqueléticos en Trabajadores del Ministerio de Salud 2019. 2018. Available online: https://hdl.handle.net/20.500.12727/5490 (accessed on 29 July 2021).
- Sihawong, R.; Janwantanakul, P.; Jiamjarasrangsi, W. A prospective, cluster-randomized controlled trial of exercise program to prevent low back pain in office workers. Eur. Spine J. 2014, 23, 786–793. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moore, C.; Ceridan, E.; Schonard, C.; Marasa, M.; Shaib, F.; Holland, J. Prevention of low back pain in sedentary healthy workers: A pilot study. Am. J. Med Sci. 2012, 344, 90–95. [Google Scholar] [CrossRef] [PubMed]
- Steffens, D.; Maher, C.G.; Pereira, L.S.; Stevens, M.L.; Oliveira, V.C.; Chapple, M.; Teixeira-Salmela, L.F.; Hancock, M.J. Prevention of low back pain: A systematic review and meta-analysis. JAMA Intern. Med. 2016, 176, 199–208. [Google Scholar] [CrossRef] [PubMed]
- George, S.Z.; Childs, J.D.; Teyhen, D.S.; Wu, S.S.; Wright, A.C.; Dugan, J.L.; Robinson, M.E. Brief psychosocial education, not core stabilization, reduced incidence of low back pain: Results from the Prevention of Low Back Pain in the Military (POLM) cluster randomized trial. BMC Med. 2011, 9, 128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lavender, S.A.; Lorenz, E.P.; Andersson, G.B. Can a new behaviorally oriented training process to improve lifting technique prevent occupationally related back injuries due to lifting? Spine 2007, 32, 487–494. [Google Scholar] [CrossRef]
- Kraus, J.F.; Schaffer, K.B.; Rice, T.; Maroosis, J.; Harper, J. A field trial of back belts to reduce the incidence of acute low back injuries in New York City home attendants. Int. J. Occup. Environ. Health 2002, 8, 97–104. [Google Scholar] [CrossRef] [PubMed]
- Yoo, W.G.; Park, S.Y. Effects of posture-related auditory cueing (PAC) program on muscles activities and kinematics of the neck and trunk during computer work. Work 2015, 50, 187–191. [Google Scholar] [CrossRef]
- Yu, E.; Moon, K.; Oah, S.; Lee, Y. An evaluation of the effectiveness of an automated observation and feedback system on safe sitting postures. J. Organ. Behav. Manag. 2013, 33, 104–127. [Google Scholar] [CrossRef]
- Taieb-Maimon, M.; Cwikel, J.; Shapira, B.; Orenstein, I. The effectiveness of a training method using self-modeling webcam photos for reducing musculoskeletal risk among office workers using computers. Appl. Ergon. 2012, 43, 376–385. [Google Scholar] [CrossRef]
- Coenen, P.; Gilson, N.; Healy, G.N.; Dunstan, D.W.; Straker, L.M. A qualitative review of existing national and international occupational safety and health policies relating to occupational sedentary behaviour. Appl. Ergon. 2017, 60, 320–333. [Google Scholar] [CrossRef]
- Claus, A.P.; Hides, J.A.; Moseley, G.L.; Hodges, P.W. Thoracic and lumbar posture behaviour in sitting tasks and standing: Progressing the biomechanics from observations to measurements. Appl. Ergon. 2016, 53, 161–168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- de Quadros, T.; Lazzaretti, A.E.; Schneider, F.K. A movement decomposition and machine learning-based fall detection system using wrist wearable device. IEEE Sens. J. 2018, 18, 5082–5089. [Google Scholar] [CrossRef]
- Graupe, D. Principles of Artificial Neural Networks; World Scientific: Singapore, 2013; Volume 7. [Google Scholar]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep sparse rectifier neural networks. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Ft. Lauderdale, FL, USA, 11–13 April 2011; pp. 315–323. [Google Scholar]
- Aloysius, N.; Geetha, M. A review on deep convolutional neural networks. In Proceedings of the 2017 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 6–8 April 2017; pp. 0588–0592. [Google Scholar]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Gutierrez-Galan, D.; Dominguez-Morales, J.P.; Cerezuela-Escudero, E.; Rios-Navarro, A.; Tapiador-Morales, R.; Rivas-Perez, M.; Dominguez-Morales, M.; Jimenez-Fernandez, A.; Linares-Barranco, A. Embedded neural network for real-time animal behavior classification. Neurocomputing 2018, 272, 17–26. [Google Scholar] [CrossRef]
- Selvi, R.T.; Muthulakshmi, I. An optimal artificial neural network based big data application for heart disease diagnosis and classification model. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 6129–6139. [Google Scholar] [CrossRef]
- Xu, Z.Q.J.; Zhang, Y.; Xiao, Y. Training behavior of deep neural network in frequency domain. In International Conference on Neural Information Processing; Springer: Cham, Switzerland, 2019; pp. 264–274. [Google Scholar]
- Muñoz-Saavedra, L.; Luna-Perejón, F.; Civit-Masot, J.; Miró-Amarante, L.; Civit, A.; Domínguez-Morales, M. Affective state assistant for helping users with cognition disabilities using neural networks. Electronics 2020, 9, 1843. [Google Scholar] [CrossRef]
- Khatami, A.; Nazari, A.; Beheshti, A.; Nguyen, T.T.; Nahavandi, S.; Zieba, J. Convolutional neural network for medical image classification using wavelet features. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Choi, E.J.; Yoo, Y.; Park, B.R.; Choi, Y.J.; Moon, J.W. Development of occupant pose classification model using deep neural network for personalized thermal conditioning. Energies 2020, 13, 45. [Google Scholar] [CrossRef] [Green Version]
- Duran-Lopez, L.; Dominguez-Morales, J.P.; Rios-Navarro, A.; Gutierrez-Galan, D.; Jimenez-Fernandez, A.; Vicente-Diaz, S.; Linares-Barranco, A. Performance Evaluation of Deep Learning-Based Prostate Cancer Screening Methods in Histopathological Images: Measuring the Impact of the Model’s Complexity on Its Processing Speed. Sensors 2021, 21, 1122. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Stoelting, A.; Wang, Y.T.; Zou, Y.; Sarrafzadeh, M. Providing a cushion for wireless healthcare application development. IEEE Potentials 2010, 29, 19–23. [Google Scholar] [CrossRef]
- Zemp, R.; Tanadini, M.; Plüss, S.; Schnüriger, K.; Singh, N.B.; Taylor, W.R.; Lorenzetti, S. Application of machine learning approaches for classifying sitting posture based on force and acceleration sensors. BioMed Res. Int. 2016, 2016, 5978489. [Google Scholar] [CrossRef] [Green Version]
- Bontrup, C.; Taylor, W.R.; Fliesser, M.; Visscher, R.; Green, T.; Wippert, P.M.; Zemp, R. Low back pain and its relationship with sitting behaviour among sedentary office workers. Appl. Ergon. 2019, 81, 102894. [Google Scholar] [CrossRef]
- Licciardo, G.D.; Russo, A.; Naddeo, A.; Cappetti, N.; Di Benedetto, L.; Rubino, A.; Liguori, R. A Resource Constrained Neural Network for the Design of Embedded Human Posture Recognition Systems. Appl. Sci. 2021, 11, 4752. [Google Scholar] [CrossRef]
- Wang, J.; Hafidh, B.; Dong, H.; El Saddik, A. Sitting posture recognition using a spiking neural network. IEEE Sens. J. 2020, 21, 1779–1786. [Google Scholar] [CrossRef]
- Kulikajevas, A.; Maskeliunas, R.; Damaševičius, R. Detection of sitting posture using hierarchical image composition and deep learning. PeerJ Comput. Sci. 2021, 7, e442. [Google Scholar] [CrossRef]
- Barkallah, E.; Freulard, J.; Otis, M.J.D.; Ngomo, S.; Ayena, J.C.; Desrosiers, C. Wearable devices for classification of inadequate posture at work using neural networks. Sensors 2017, 17, 2003. [Google Scholar] [CrossRef] [Green Version]
- Luna-Perejón, F.; Domínguez-Morales, M.; Gutiérrez-Galán, D.; Civit-Balcells, A. Low-Power Embedded System for Gait Classification Using Neural Networks. J. Low Power Electron. Appl. 2020, 10, 14. [Google Scholar] [CrossRef]
- Lee, S.H.; Son, J. Development of a Safety Management System Tracking the Weight of Heavy Objects Carried by Construction Workers Using FSR Sensors. Appl. Sci. 2021, 11, 1378. [Google Scholar] [CrossRef]
- Luna-Perejón, F.; Domínguez-Morales, M.J.; Civit-Balcells, A. Wearable fall detector using recurrent neural networks. Sensors 2019, 19, 4885. [Google Scholar] [CrossRef] [Green Version]
- Sokolova, M.; Lapalme, G. A systematic analysis of performance measures for classification tasks. Inf. Process. Manag. 2009, 45, 427–437. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # Posture | Description |
|---|---|
| Posture 1 | In an upright posture, with the back supported by the chair’s backrest and the buttocks placed at the back of the seat. |
| Posture 2 | In a reclined position, with only the upper part of the back resting on the back of the chair and the buttocks resting on the front part of the seat. |
| Posture 3 | With the torso bent forward, elbows resting on the legs, back completely separated from the backrest. |
| Posture 4 | With the torso inclined laterally to the right, armrest supporting part of the weight. |
| Posture 5 | With the torso inclined laterally to the left, armrest supporting part of the weight. |
| Posture 6 | In an upright posture, similar to posture 1, but with the right leg crossed over the left. |
| Posture 7 | In an upright posture, similar to posture 1, but with the left leg crossed over the right. |
| No. of HL | No. of Neurons | ||||||
|---|---|---|---|---|---|---|---|
| 8 | 16 | 32 | 64 | 128 | 256 | 512 | |
| 1 | 48.15% | 70.69% | 67.21% | 74.03% | 63.47% | 73.14% | 72.05% |
| 2 | 63.26% | 76.15% | 65.29% | 71.05% | 81.00% | 73.65% | 74.68% |
| 3 | 63.61% | 69.07% | 73.08% | 75.74% | 73.26% | 73.44% | 72.46% |
| 4 | 63.29% | 67.21% | 68.13% | 73.30% | 74.97% | 76.86% | 79.10% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luna-Perejón, F.; Montes-Sánchez, J.M.; Durán-López, L.; Vazquez-Baeza, A.; Beasley-Bohórquez, I.; Sevillano-Ramos, J.L. IoT Device for Sitting Posture Classification Using Artificial Neural Networks. Electronics 2021, 10, 1825. https://doi.org/10.3390/electronics10151825
Luna-Perejón F, Montes-Sánchez JM, Durán-López L, Vazquez-Baeza A, Beasley-Bohórquez I, Sevillano-Ramos JL. IoT Device for Sitting Posture Classification Using Artificial Neural Networks. Electronics. 2021; 10(15):1825. https://doi.org/10.3390/electronics10151825
Chicago/Turabian StyleLuna-Perejón, Francisco, Juan Manuel Montes-Sánchez, Lourdes Durán-López, Alberto Vazquez-Baeza, Isabel Beasley-Bohórquez, and José L. Sevillano-Ramos. 2021. "IoT Device for Sitting Posture Classification Using Artificial Neural Networks" Electronics 10, no. 15: 1825. https://doi.org/10.3390/electronics10151825
APA StyleLuna-Perejón, F., Montes-Sánchez, J. M., Durán-López, L., Vazquez-Baeza, A., Beasley-Bohórquez, I., & Sevillano-Ramos, J. L. (2021). IoT Device for Sitting Posture Classification Using Artificial Neural Networks. Electronics, 10(15), 1825. https://doi.org/10.3390/electronics10151825