Author Contributions
Conceptualization, T.O.; methodology, T.O., K.G.; software, K.G., T.O.; validation, K.G., T.O.; writing—original draft preparation, T.O., K.G.; writing—review and editing, T.O.; visualization, K.G., T.O.; supervision, T.O.; project administration, T.O.; funding acquisition, T.O. All authors have read and agreed to the published version of the manuscript.
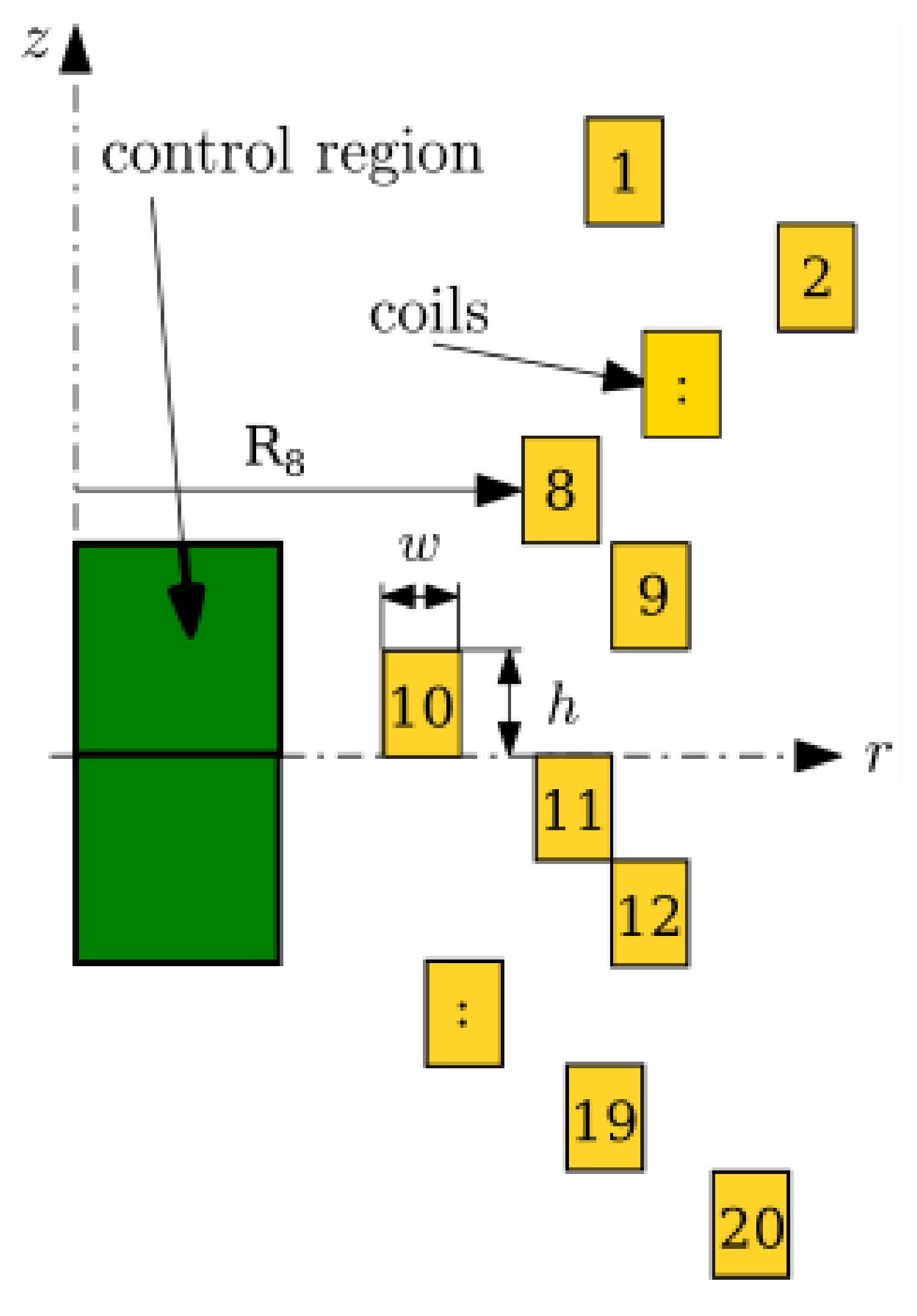
Figure 1.
The examined geometry in an axisymmetric arrangement. The green area shows the controlled region in which the magnetic field is considered. Every single turn of the coil is denoted by yellow rectangles; their radii are optimized turn by turn.
Figure 1.
The examined geometry in an axisymmetric arrangement. The green area shows the controlled region in which the magnetic field is considered. Every single turn of the coil is denoted by yellow rectangles; their radii are optimized turn by turn.
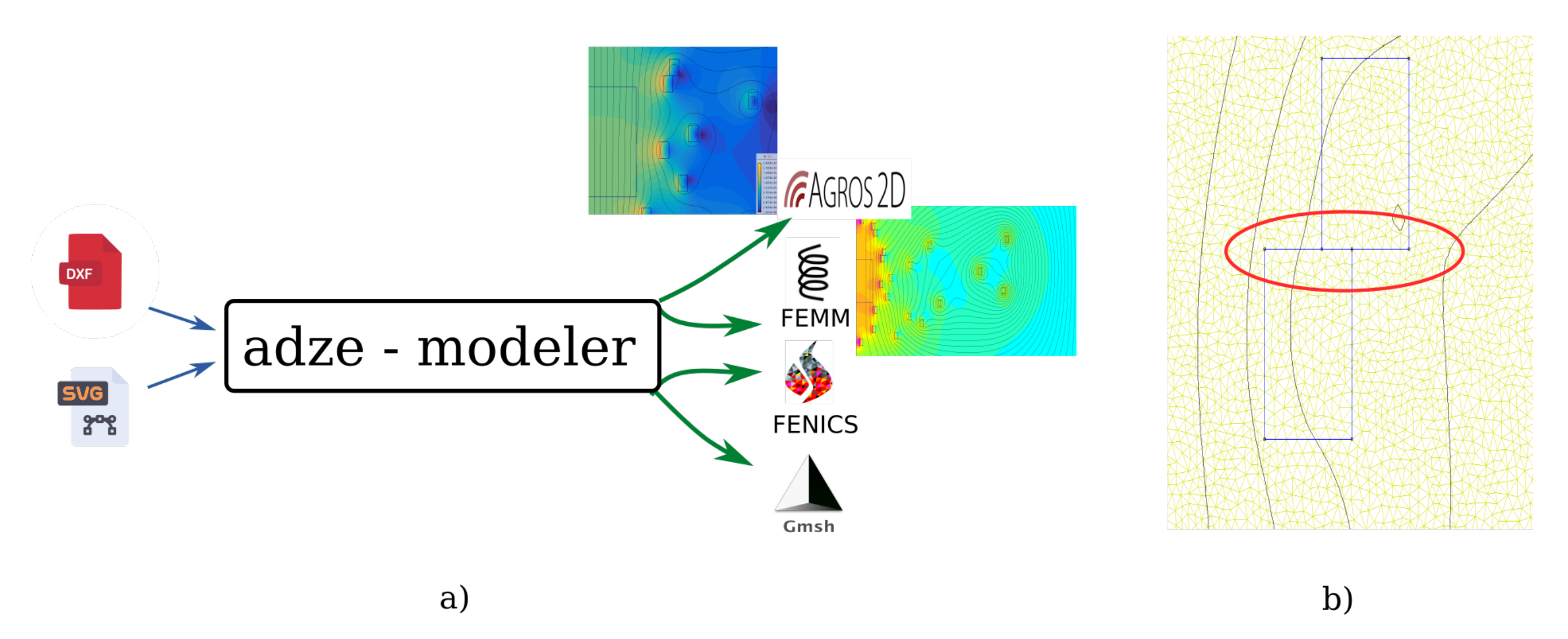
Figure 2.
The image (a) shows the functionalities used and the workflow that was realized via the Adze-modeler. (b) The usage of the collision detection function, which automatically replaces the overlapping edges due to the optimization process.
Figure 2.
The image (a) shows the functionalities used and the workflow that was realized via the Adze-modeler. (b) The usage of the collision detection function, which automatically replaces the overlapping edges due to the optimization process.
Figure 3.
The pictures (a,b) show the geometry examined and the resulting flux distribution with the Agros2D (a) and FEMM software (b). The pictures (c,d) show the convergence of the radial and the axial component of the flux density in the selected (r = 5 mm, z = 5 mm) point.
Figure 3.
The pictures (a,b) show the geometry examined and the resulting flux distribution with the Agros2D (a) and FEMM software (b). The pictures (c,d) show the convergence of the radial and the axial component of the flux density in the selected (r = 5 mm, z = 5 mm) point.
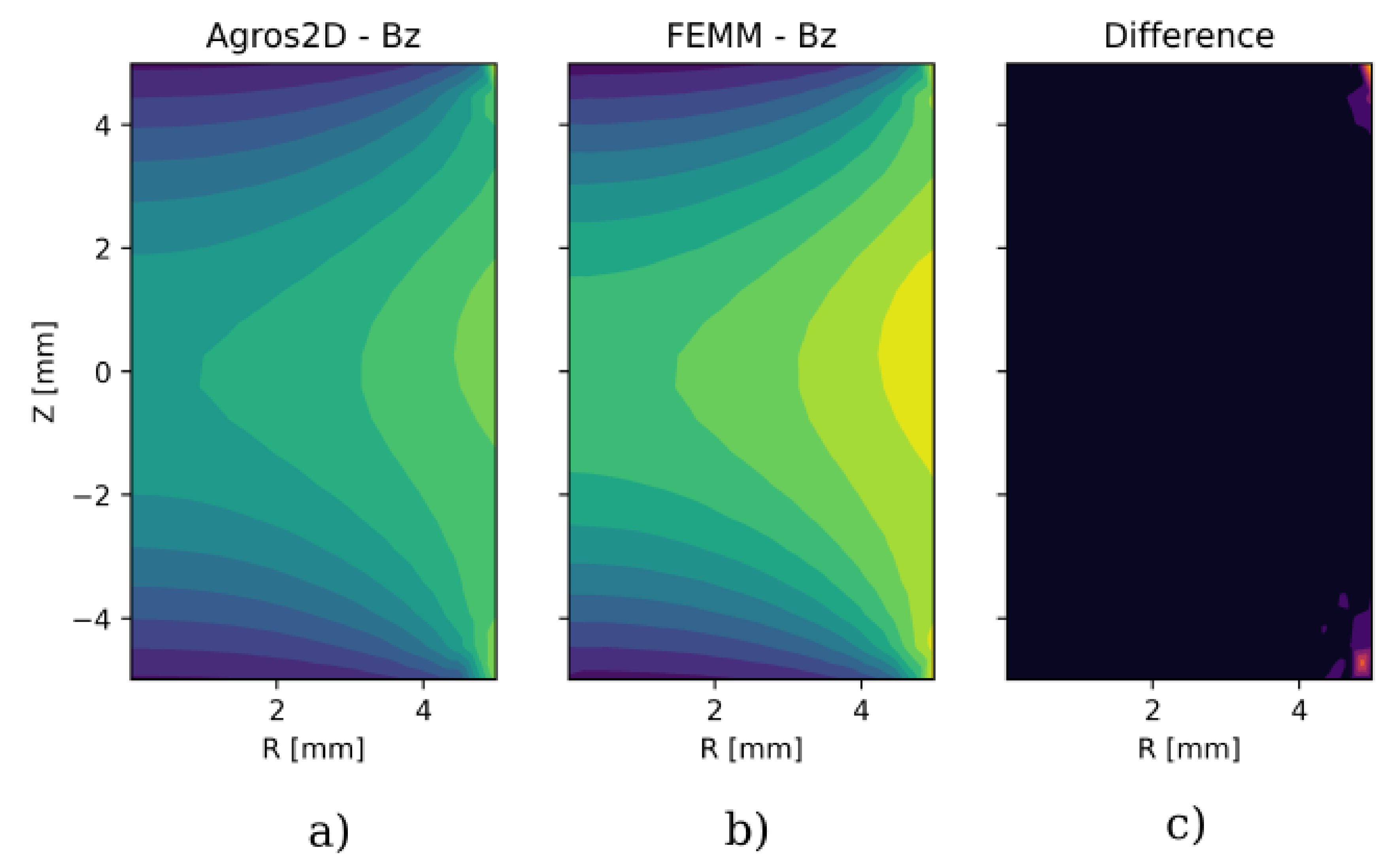
Figure 4.
The pictures (a,b) show the calculated flux density values in the upper half of the examined region with the two types of software compared: Agros2d (a) and FEMM (b). The third picture (c) shows the dependence of the values on the meshing properties.
Figure 4.
The pictures (a,b) show the calculated flux density values in the upper half of the examined region with the two types of software compared: Agros2d (a) and FEMM (b). The third picture (c) shows the dependence of the values on the meshing properties.
Figure 5.
The convergence of the objective functions ( and ) in terms of the number of nodes with and without hp-adaptivity. (a) The image plots the dependence of , while (b) plots the dependence of the function on the number of nodes.
Figure 5.
The convergence of the objective functions ( and ) in terms of the number of nodes with and without hp-adaptivity. (a) The image plots the dependence of , while (b) plots the dependence of the function on the number of nodes.
Figure 6.
The plots (a–c) depict the shape of the optimized , , and objectives, (a–c) images plots the 3D surface of the objective function from different views.
Figure 6.
The plots (a–c) depict the shape of the optimized , , and objectives, (a–c) images plots the 3D surface of the objective function from different views.
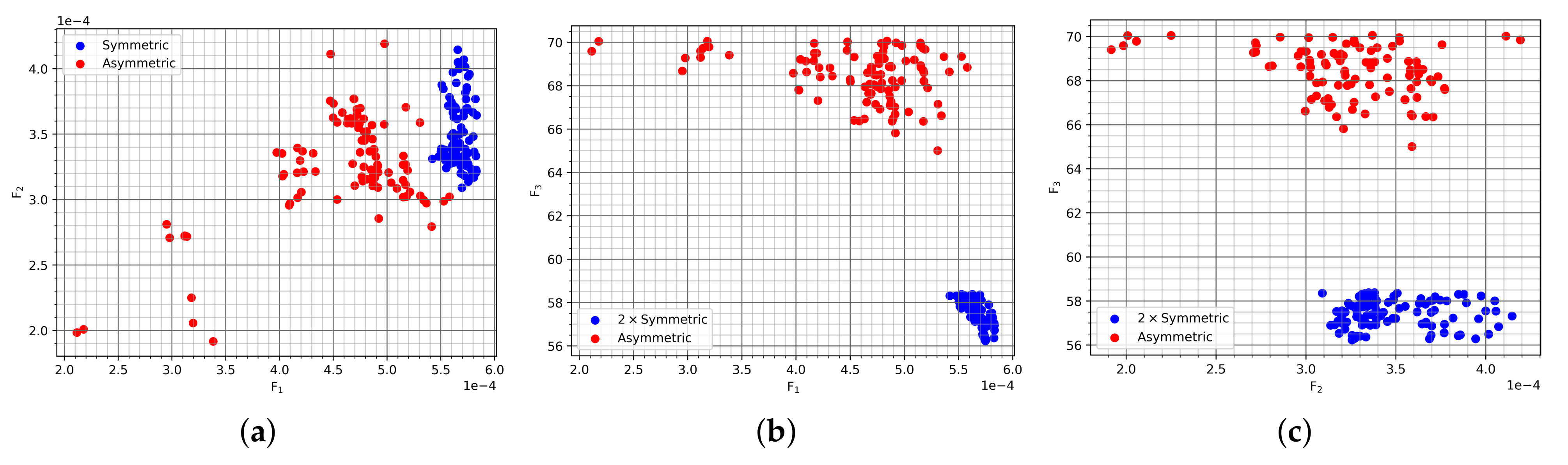
Figure 7.
The image shows the first 100 individuals when they are sorted based on uniformity () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 7.
The image shows the first 100 individuals when they are sorted based on uniformity () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 8.
The first 100 individuals from the three-dimensional Pareto front were sorted based on their robustness () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 8.
The first 100 individuals from the three-dimensional Pareto front were sorted based on their robustness () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
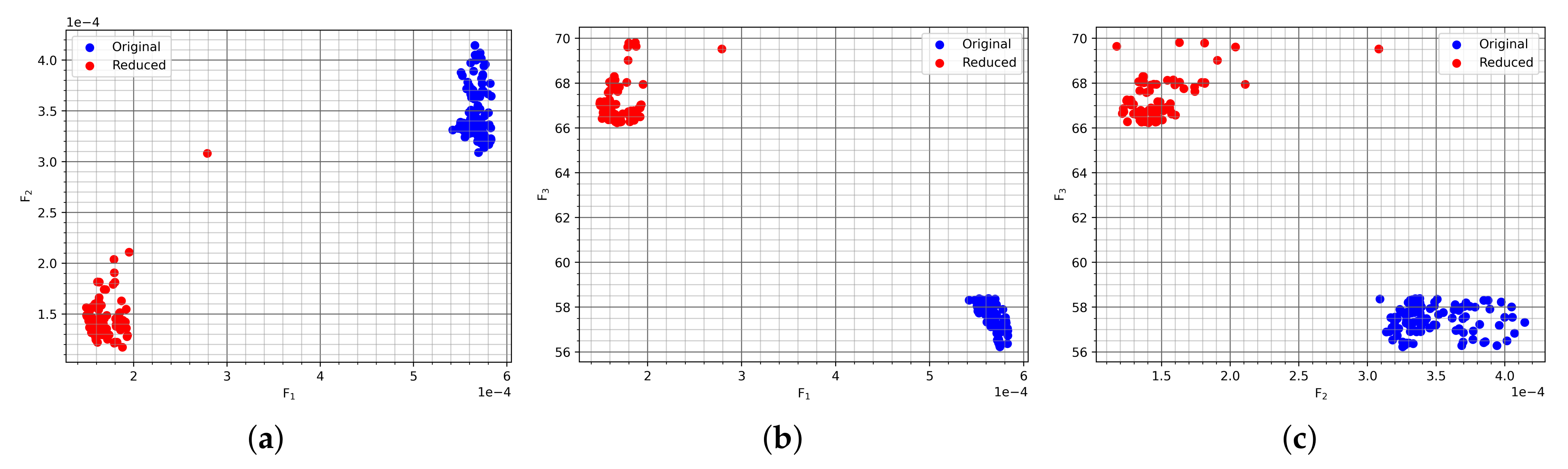
Figure 9.
The image shows the distribution of the 100 cheapest individuals () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 9.
The image shows the distribution of the 100 cheapest individuals () in case (a). The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 10.
The distribution of the radii of the last 100 unsorted individuals. (a) Symmetric and asymmetric setups. All coils are allowed to move freely within the logical boundaries. (b) Only the symmetric setups where the coils are first allowed to move freely are shown (red); then, they are constrained in the 5.5–20 mm region (blue). (c) The distributions of the radii for the symmetric and asymmetric setups using only 12 coils. All coils were constrained to move within the 5.5–20 mm region.
Figure 10.
The distribution of the radii of the last 100 unsorted individuals. (a) Symmetric and asymmetric setups. All coils are allowed to move freely within the logical boundaries. (b) Only the symmetric setups where the coils are first allowed to move freely are shown (red); then, they are constrained in the 5.5–20 mm region (blue). (c) The distributions of the radii for the symmetric and asymmetric setups using only 12 coils. All coils were constrained to move within the 5.5–20 mm region.
Figure 11.
The last 100 individuals if the last generation is not sorted based on any of the conditions. These solutions are lying on the Pareto front. The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 11.
The last 100 individuals if the last generation is not sorted based on any of the conditions. These solutions are lying on the Pareto front. The blue dots show the symmetric setups, while the asymmetric solutions are depicted in red. (a) The distribution of individuals on the – axis. (b) The distribution on the – axis. (c) The distribution on the – axis.
Figure 12.
The comparison of the 100 cheapest symmetric solutions. With the blue color, all 20 coils are free to move, and with the red, only 12 coils are used, and they are constrained to move within the 5.5–20 mm region.
Figure 12.
The comparison of the 100 cheapest symmetric solutions. With the blue color, all 20 coils are free to move, and with the red, only 12 coils are used, and they are constrained to move within the 5.5–20 mm region.
Figure 13.
The image shows the last 100 symmetric solutions with various setups. The case where all 20 coils were free to move is in red. The blue color shows when all 20 coils are constrained in the 5.5–20 mm region, and finally, the green color depicts the case where only 12 coils are used, and they are constrained to the 5.5–20 mm region. (a) The distribution of the various setups on the – axis, (b) on the – axis, and (c) on the – axis.
Figure 13.
The image shows the last 100 symmetric solutions with various setups. The case where all 20 coils were free to move is in red. The blue color shows when all 20 coils are constrained in the 5.5–20 mm region, and finally, the green color depicts the case where only 12 coils are used, and they are constrained to the 5.5–20 mm region. (a) The distribution of the various setups on the – axis, (b) on the – axis, and (c) on the – axis.
Table 1.
The results of the validation run for the input compared to the reference values of and .
Table 1.
The results of the validation run for the input compared to the reference values of and .
| | | | | | | |
|---|
| | [T] | [T] | [T] | [%] | [T] | [%] |
|---|
| Reference | 8.18 × 10−4 | 3.01 × 10−4 | - | - | - | - |
| FEMM | 8.40 × 10−4 | 2.91 × 10−4 | −2.20 × 10−5 | 2.69% | 1.00 × 10−5 | 2.20% |
| Agros2D | 8.36 × 10−4 | 2.93 × 10−4 | −1.80 × 10−5 | 2.20% | 8.00 × 10−6 | −2.66% |
Table 2.
The settings applied for the FEMM- and Agros2d-based calculations.
Table 2.
The settings applied for the FEMM- and Agros2d-based calculations.
| Parameter | FEMM | Agros2D |
|---|
| Problem type | Magnetostatic |
| Analysis type | Steady-state |
| Coordinate system | axisymmetric |
| Polynomial order | 1 | 2 |
| Mesh settings | Smartmesh = Off | hp-adaptivity |
| Mesh size | 0.1–3 | tolerance = 5–0.005% |
Table 3.
The settings used for Agros2D during the optimization.
Table 3.
The settings used for Agros2D during the optimization.
| Parameter | Agros2D |
|---|
| Problem type | Magnetostatic |
| Analysis type | Steady-state |
| Coordinate system | axisymmetric |
| Polynomial order | 2 |
| Mesh settings | hp-adaptivity |
| Mesh size (tolerance) | 1% |
Table 4.
Solutions based on the sorting in case (a).
Table 4.
Solutions based on the sorting in case (a).
| | | | | | | | | | | | |
| Symmetric | 1.02 × 10−5 | 5.60 × 10−5 | 1.18 × 102 | 3.55 | 6.09 | 1.29 | 5.16 | 5.76 | 7.22 | 7.00 | 7.50 |
| Asymmetric | 2.07 × 10−5 | 6.16 × 10−5 | 1.00 × 102 | 1.29 | 1.47 | 2.43 | 5.02 | 6.42 | 5.43 | 6.54 | 6.80 |
| | | | | | | | | | | | | |
| Symmetric | 7.50 | 7.90 | 7.90 | 7.50 | 7.50 | 7.00 | 7.22 | 5.76 | 5.16 | 1.29 | 6.09 | 3.55 |
| Asymmetric | 6.99 | 7.14 | 7.18 | 6.92 | 6.69 | 6.67 | 5.82 | 5.55 | 4.47 | 1.47 | 4.61 | 1.06 |
Table 5.
Solutions based on the sorting in case (a).
Table 5.
Solutions based on the sorting in case (a).
| | | | | | | | | | | | |
| Symmetric | 2.49 × 10−4 | 1.53 × 10−5 | 1.37 × 102 | 6.82 | 6.42 | 3.55 | 1.97 | 5.33 | 7.07 | 8.99 | 8.69 |
| Asymmetric | 2.34 × 10−4 | 2.55 × 10−5 | 1.10 × 102 | 2.51 | 3.33 | 2.86 | 4.44 | 4.98 | 6.44 | 6.92 | 8.97 |
| | | | | | | | | | | | | |
| Symmetric | 9.76 | 9.99 | 9.99 | 9.76 | 8.69 | 8.99 | 7.07 | 5.33 | 1.97 | 3.55 | 6.42 | 6.82 |
| Asymmetric | 7.42 | 10.82 | 8.03 | 8.18 | 8.39 | 7.11 | 6.00 | 5.01 | 3.75 | 1.50 | 2.57 | 1.09 |
Table 6.
Solutions based on the sorting in case (a).
Table 6.
Solutions based on the sorting in case (a).
| | | | | | | | | | | | |
| Symmetric | 5.75 × 10−4 | 3.26 × 10−4 | 5.62 × 101 | 1.01 | 1.01 | 1.00 | 1.01 | 1.00 | 1.02 | 5.51 | 5.50 |
| Asymmetric | 5.31 × 10−4 | 3.59 × 10−4 | 6.50 × 101 | 1.14 | 1.12 | 1.01 | 1.29 | 1.03 | 5.48 | 5.65 | 5.75 |
| | | | | | | | | | | | | |
| Symmetric | 5.55 | 5.51 | 5.51 | 5.55 | 5.50 | 5.51 | 1.02 | 1.00 | 1.01 | 1.00 | 1.01 | 1.01 |
| Asymmetric | 6.03 | 6.62 | 5.69 | 5.67 | 5.73 | 5.54 | 1.31 | 1.37 | 1.17 | 1.07 | 1.08 | 1.26 |
Table 7.
Last individual in case (a).
Table 7.
Last individual in case (a).
| | | | | | | | | | | | |
| Symmetric | 5.83 × 10−4 | 3.22 × 10−4 | 5.67 × 101 | 1.01 | 1.00 | 1.01 | 1.01 | 1.04 | 1.15 | 5.61 | 5.50 |
| Asymmetric | 5.41 × 10−4 | 2.79 × 10−4 | 6.86 × 101 | 1.16 | 1.12 | 1.01 | 1.67 | 1.15 | 4.35 | 5.84 | 6.07 |
| | | | | | | | | | | | | |
| Symmetric | 5.50 | 5.54 | 5.54 | 5.50 | 5.50 | 5.61 | 1.15 | 1.04 | 1.01 | 1.01 | 1.00 | 1.01 |
| Asymmetric | 5.96 | 6.71 | 6.08 | 6.49 | 6.38 | 5.94 | 1.30 | 3.15 | 1.17 | 1.08 | 1.03 | 1.00 |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}