
Adaptive Fading Extended Kalman Filtering for Mobile Robot Localization Using a Doppler–Azimuth Radar



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- How to characterize the inaccurate odometer measurement-induced unknown bias in the kinematic model of a type (2,0) robot?
- How to consider the inaccurate odometer measurement-induced unknown bias in the D–AR measurement model?
- How to developed a on-line localization algorithm such that the given localization performance can be achieved?
- The inaccurate odometer measurement-induced unknown bias is considered in the kinematic model of a type (2,0) robot for the first time;
- The induced unknown bias is regarded in the D–AR measurement model;
- The AFEKF is adopted to reduce the impact of the modeling errors and achieving on-line localization;
- Thee comparative simulations have been conducted to testify the usefulness of the developed AFEKF by choosing three different types of modeling errors.
2. Problem Formulation
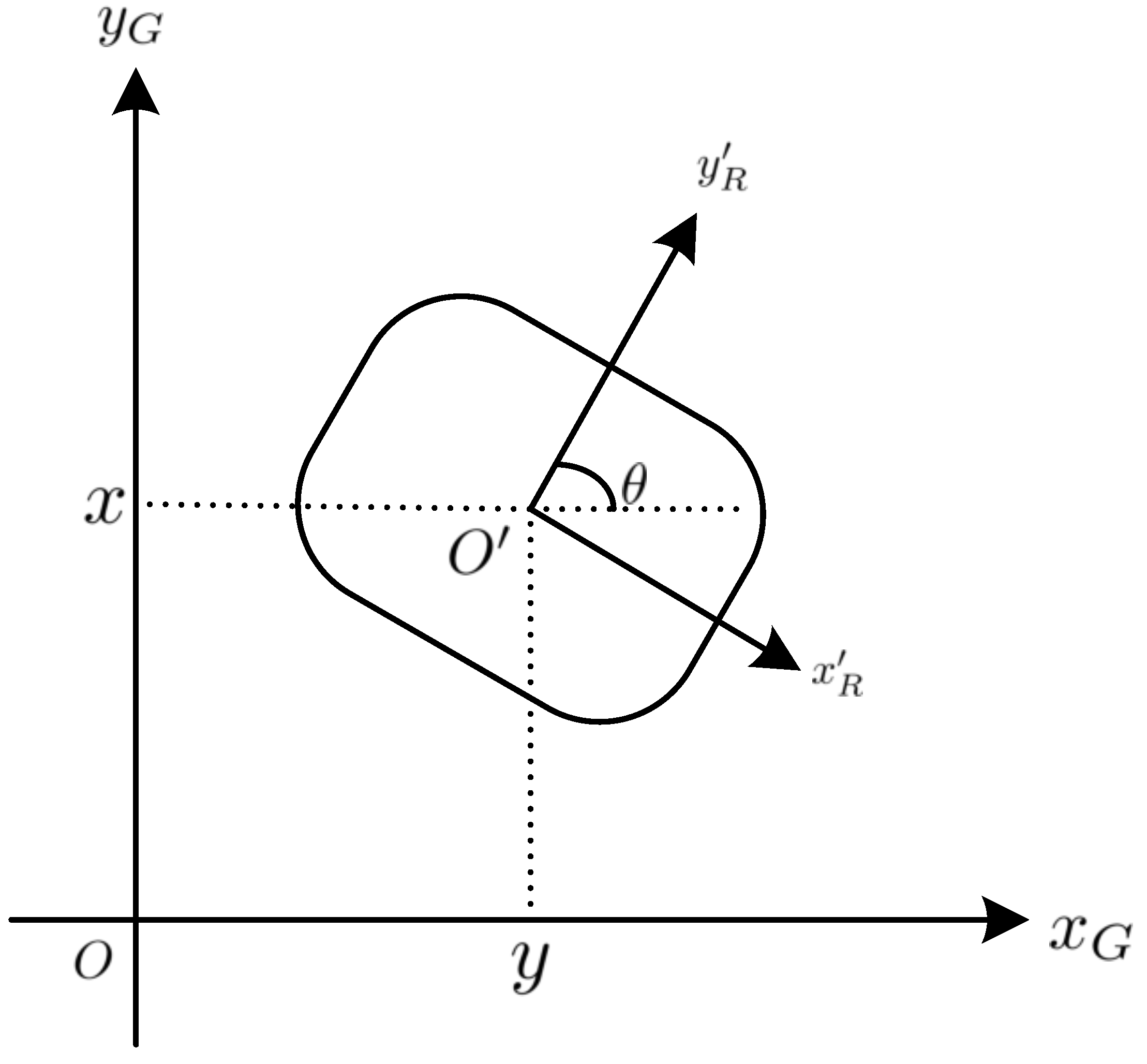
2.1. Conventional Robot Kinematic Model
2.2. Doppler-Azimuth Radar Measurement Model
3. The Conventional EKF Algorithm
4. Adaptive Fading EKF Algorithm
5. Stability Analysis
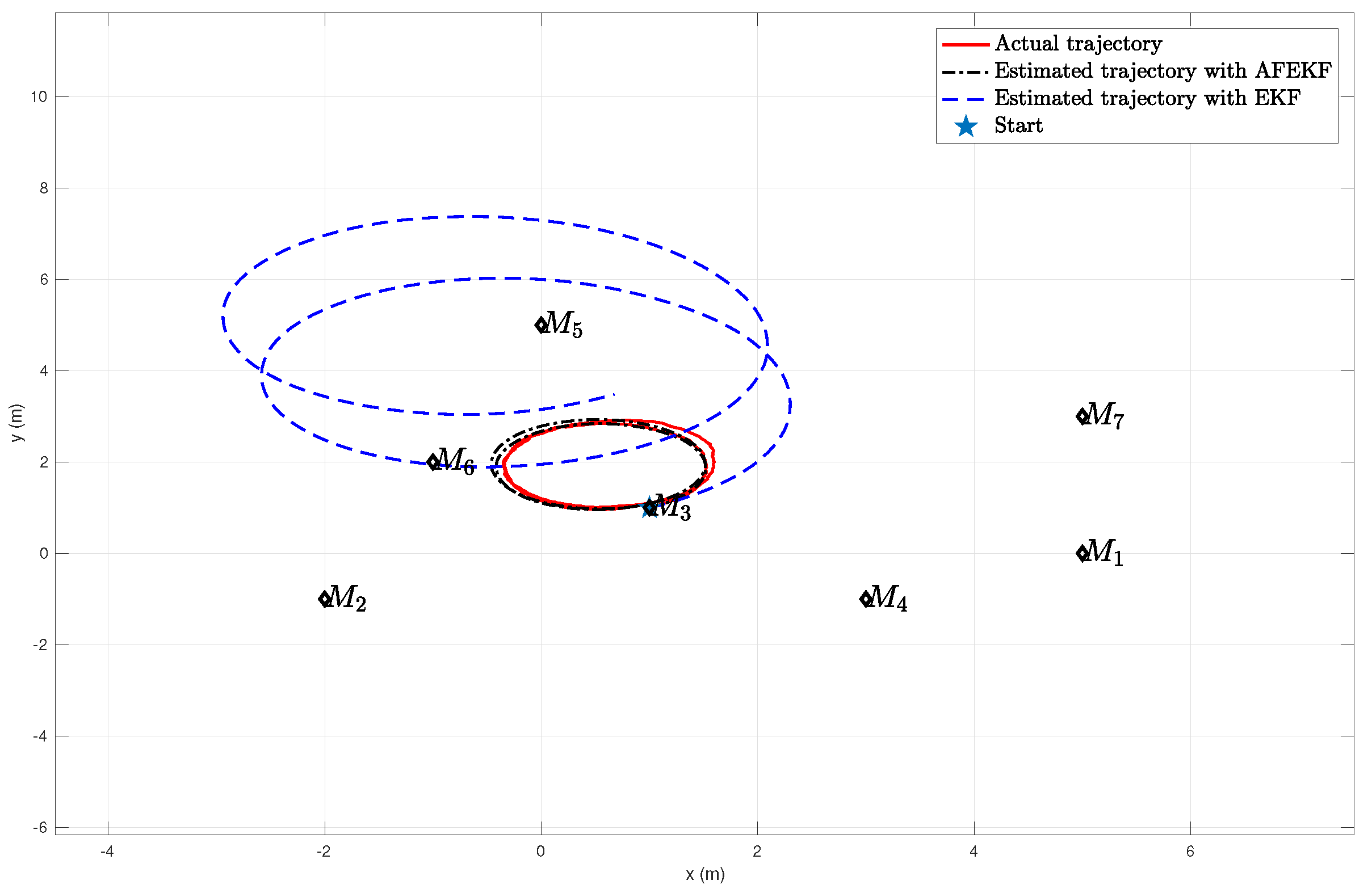
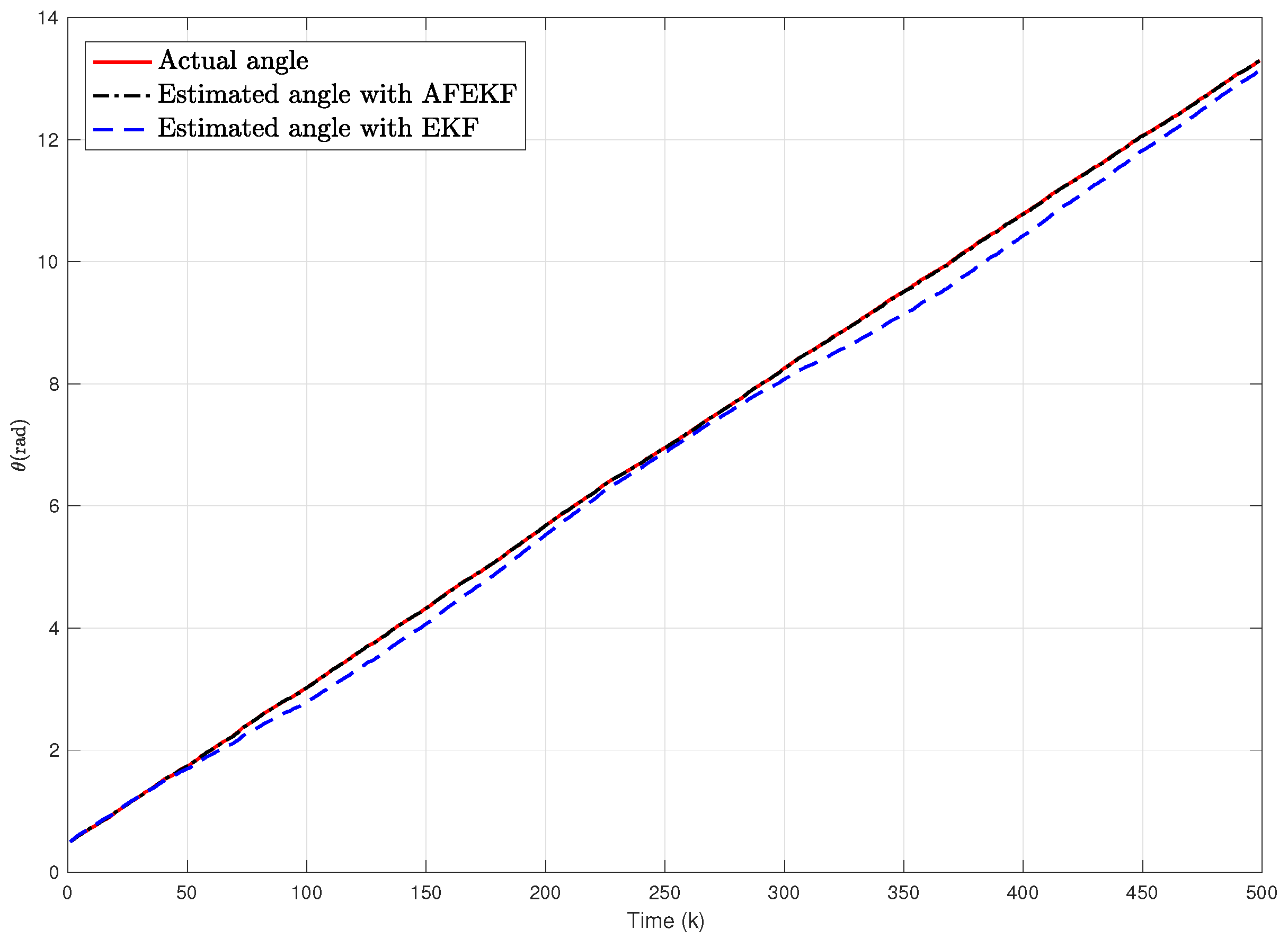
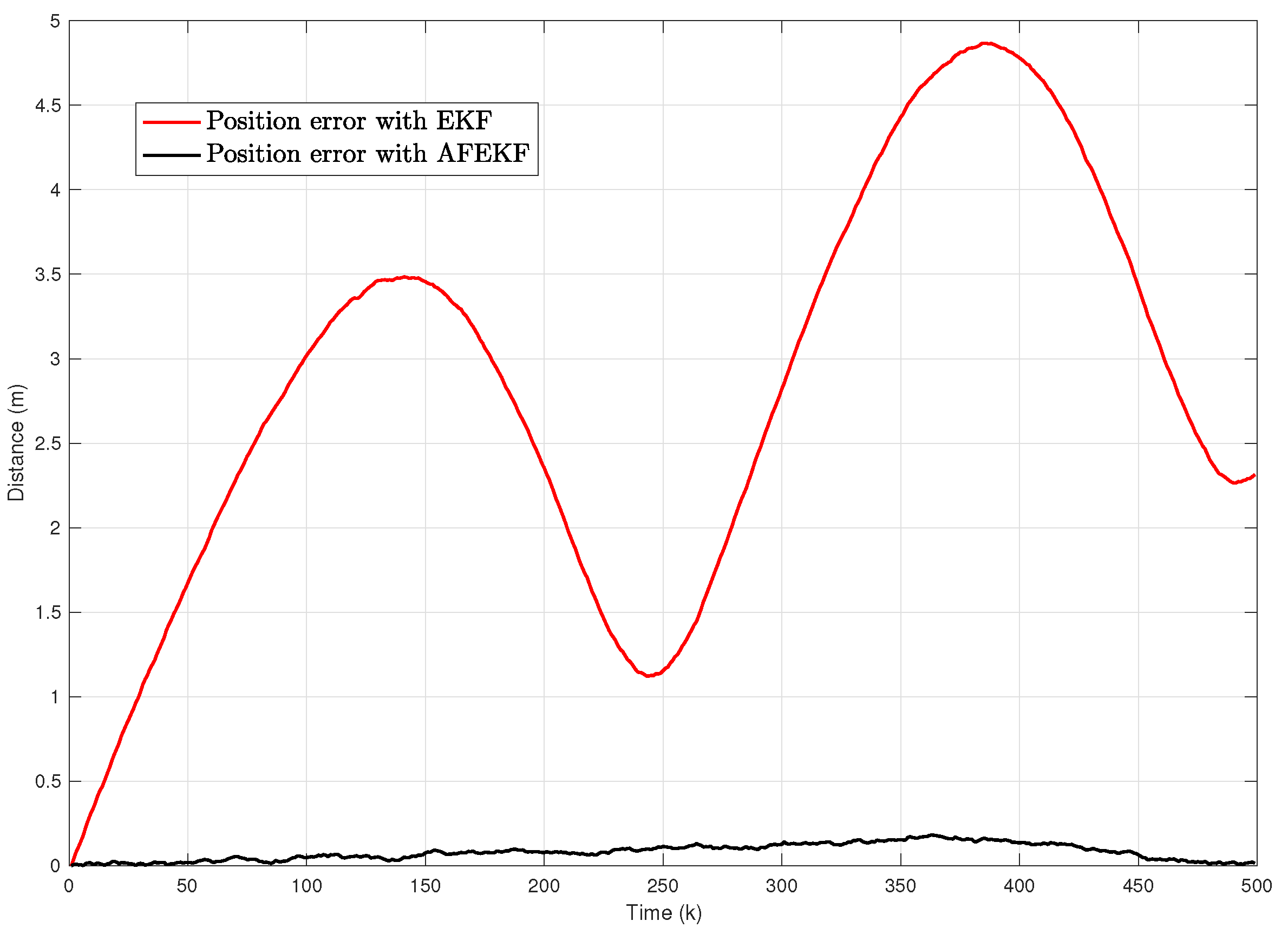
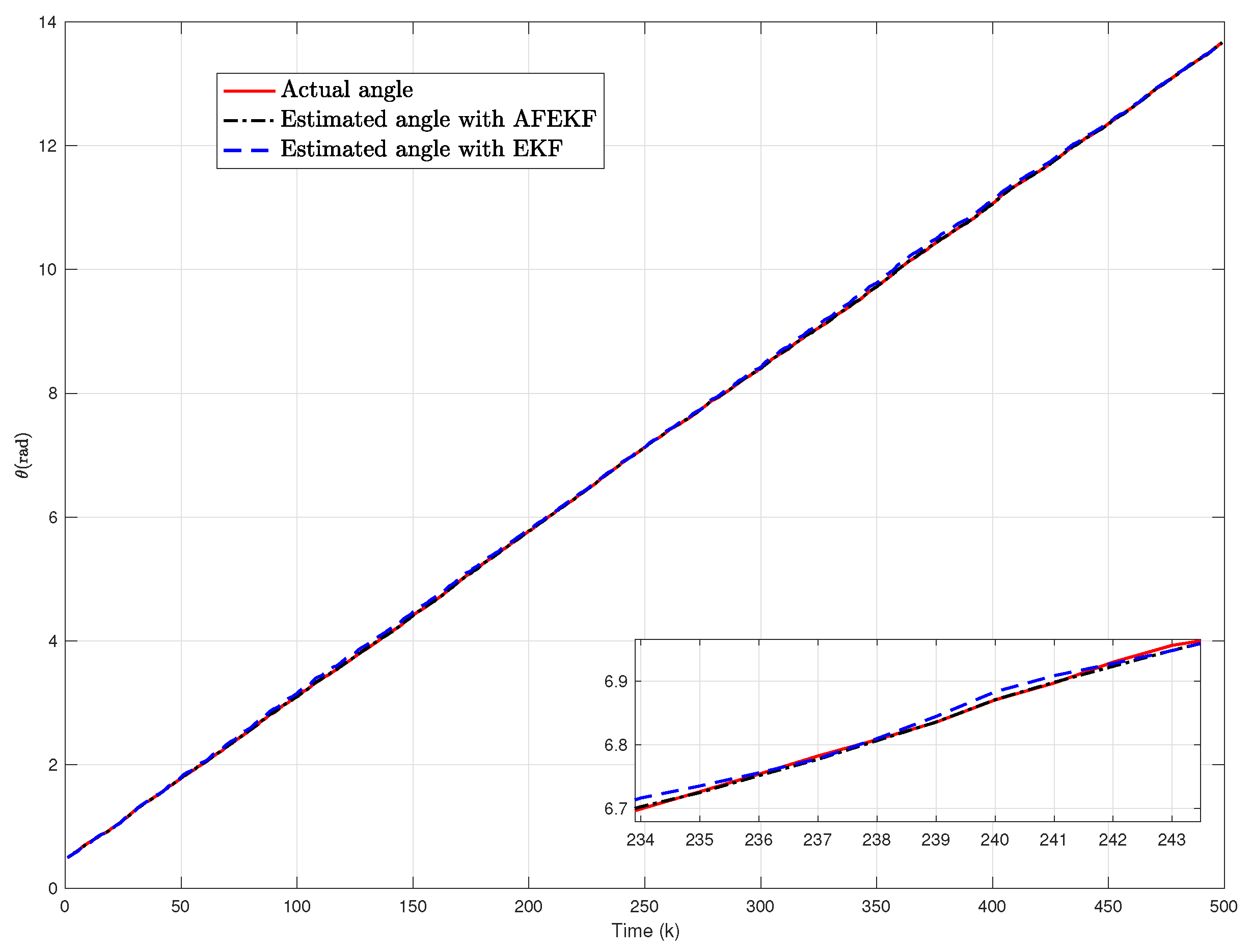
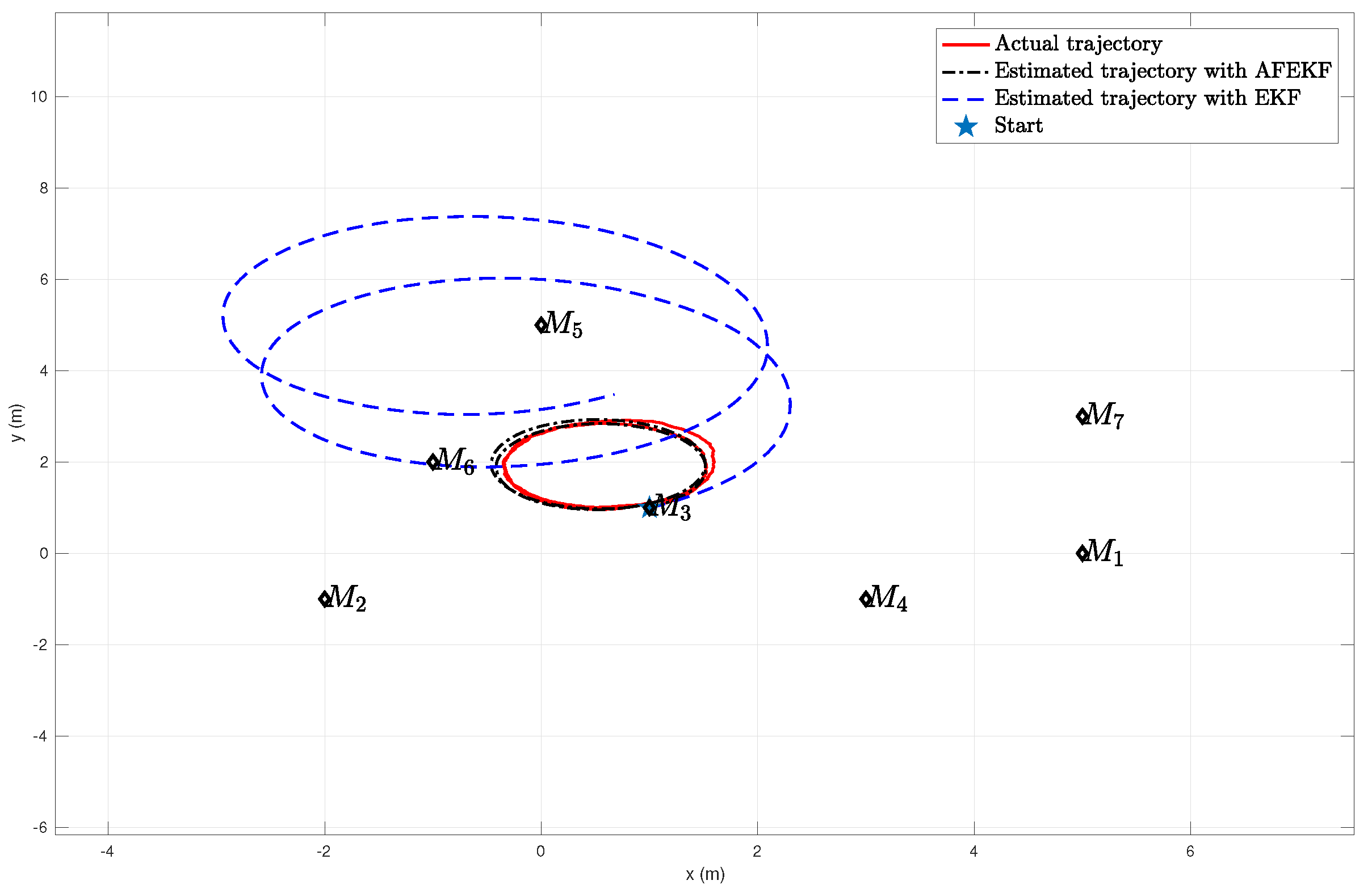
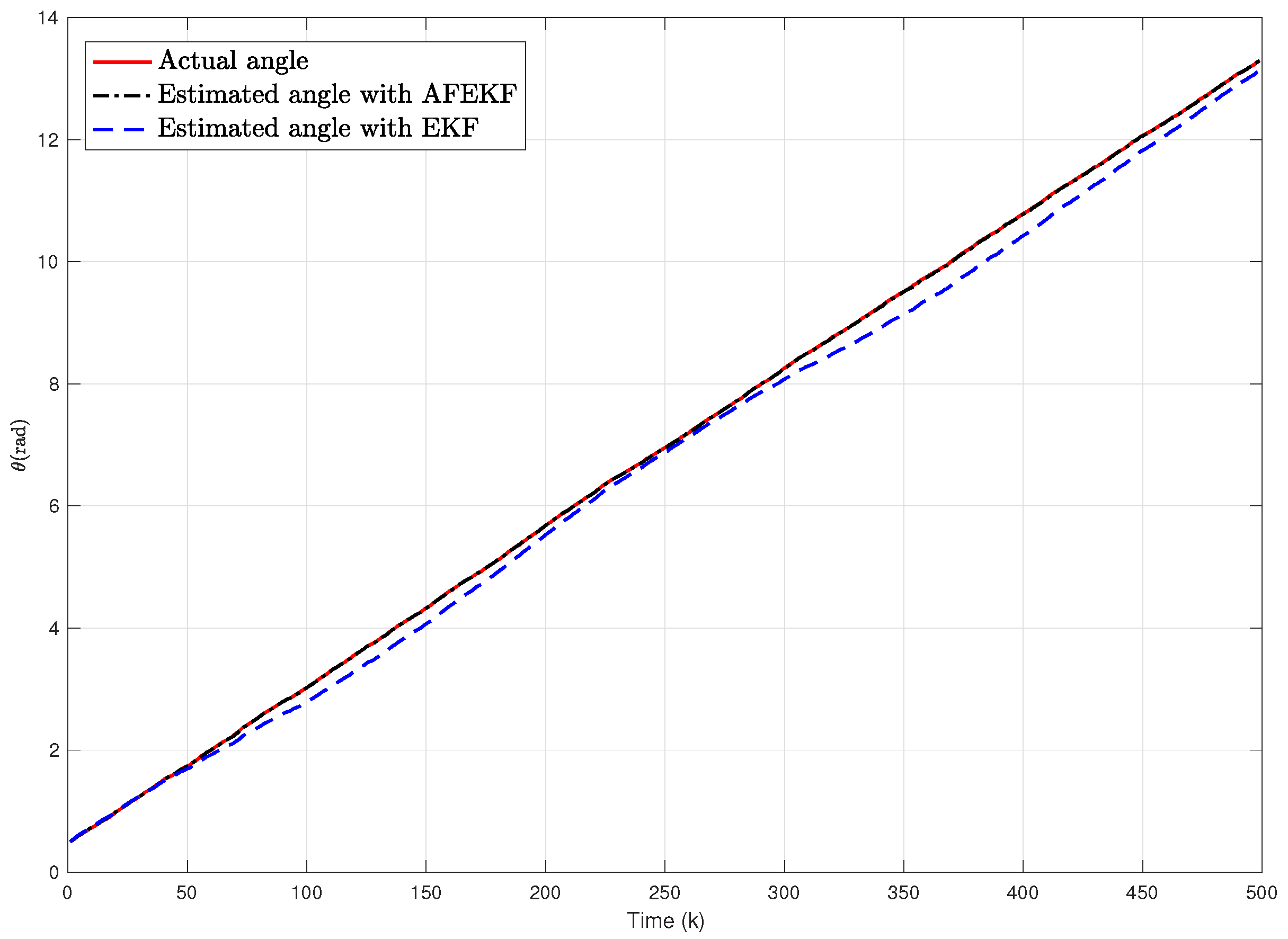
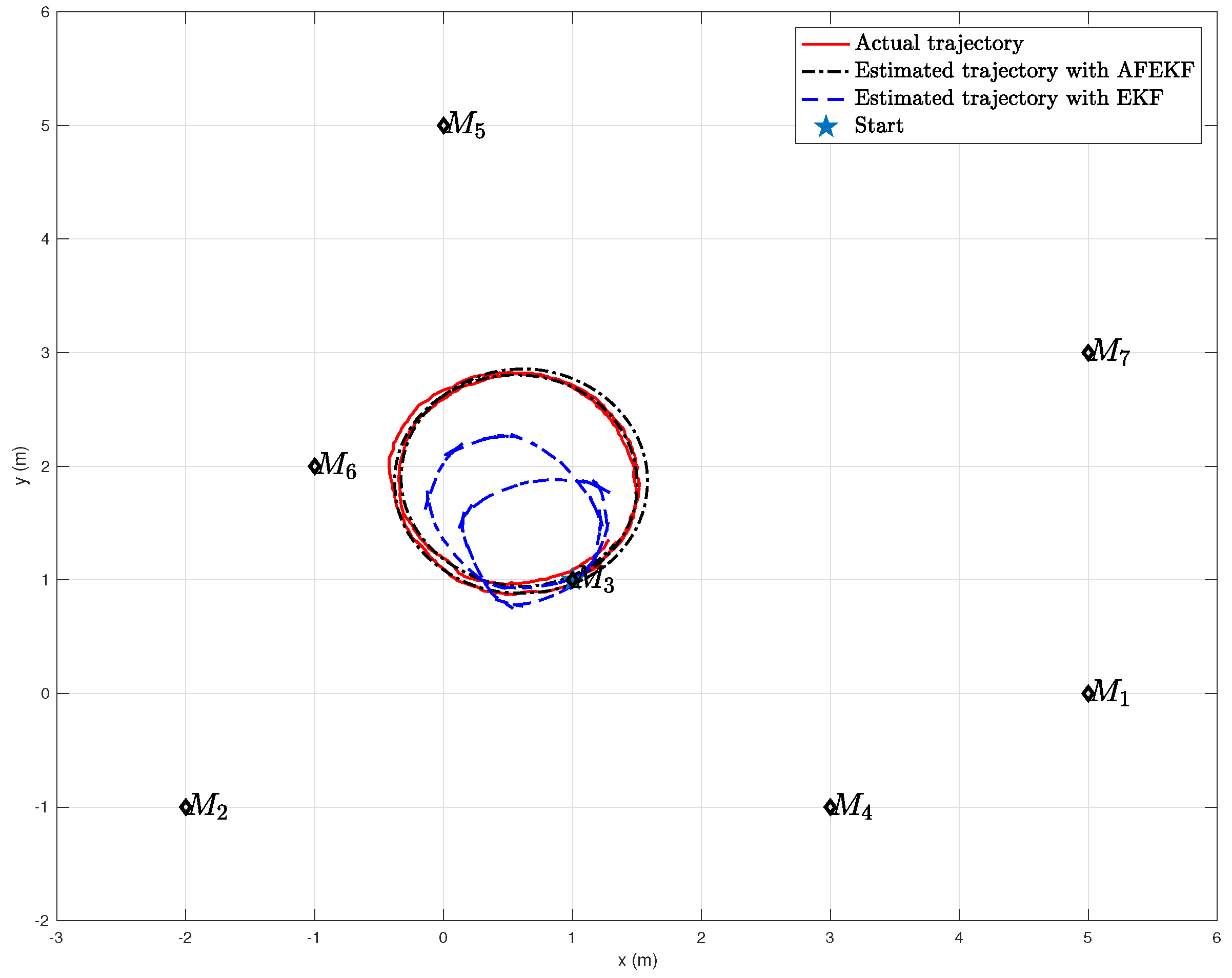
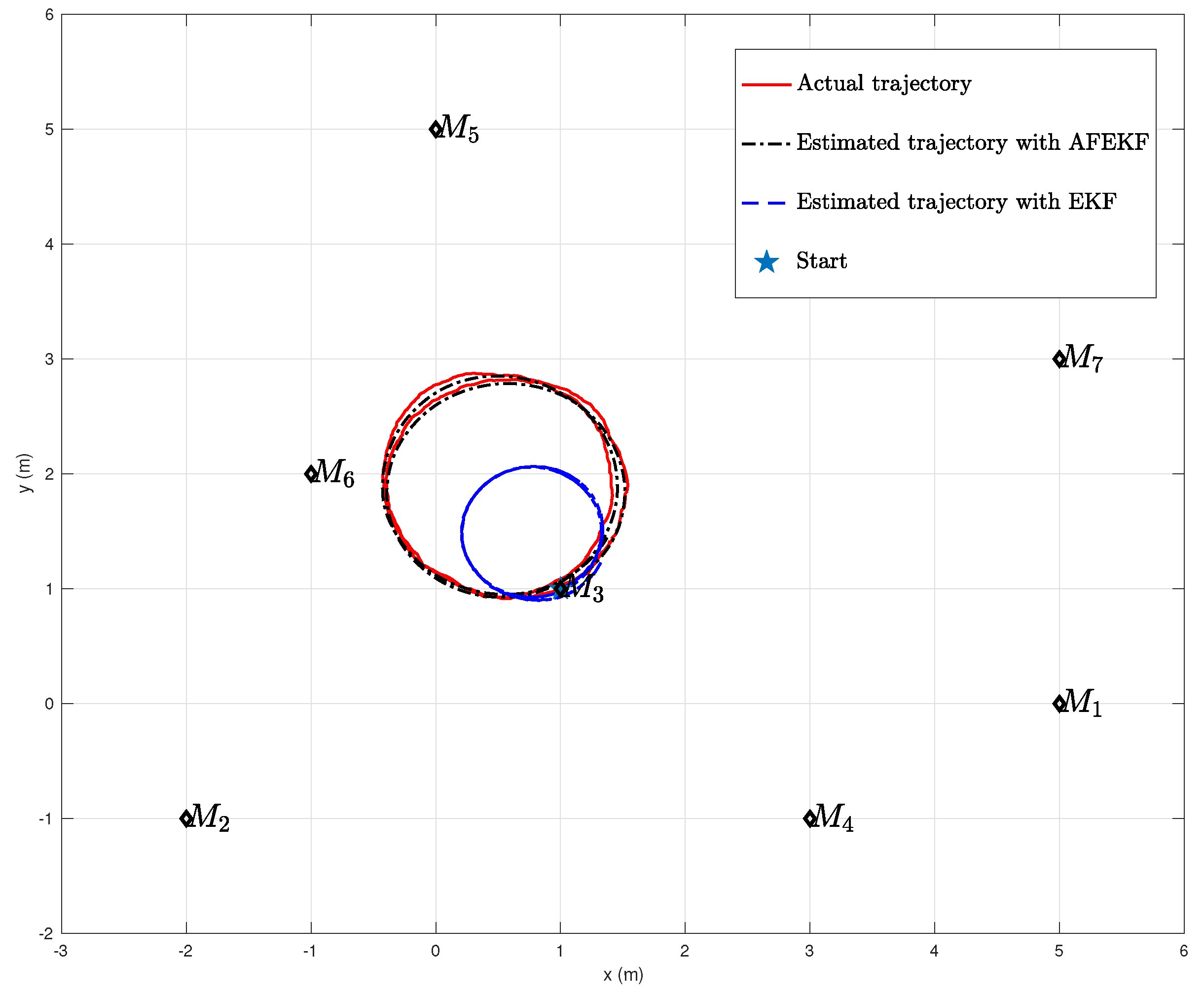
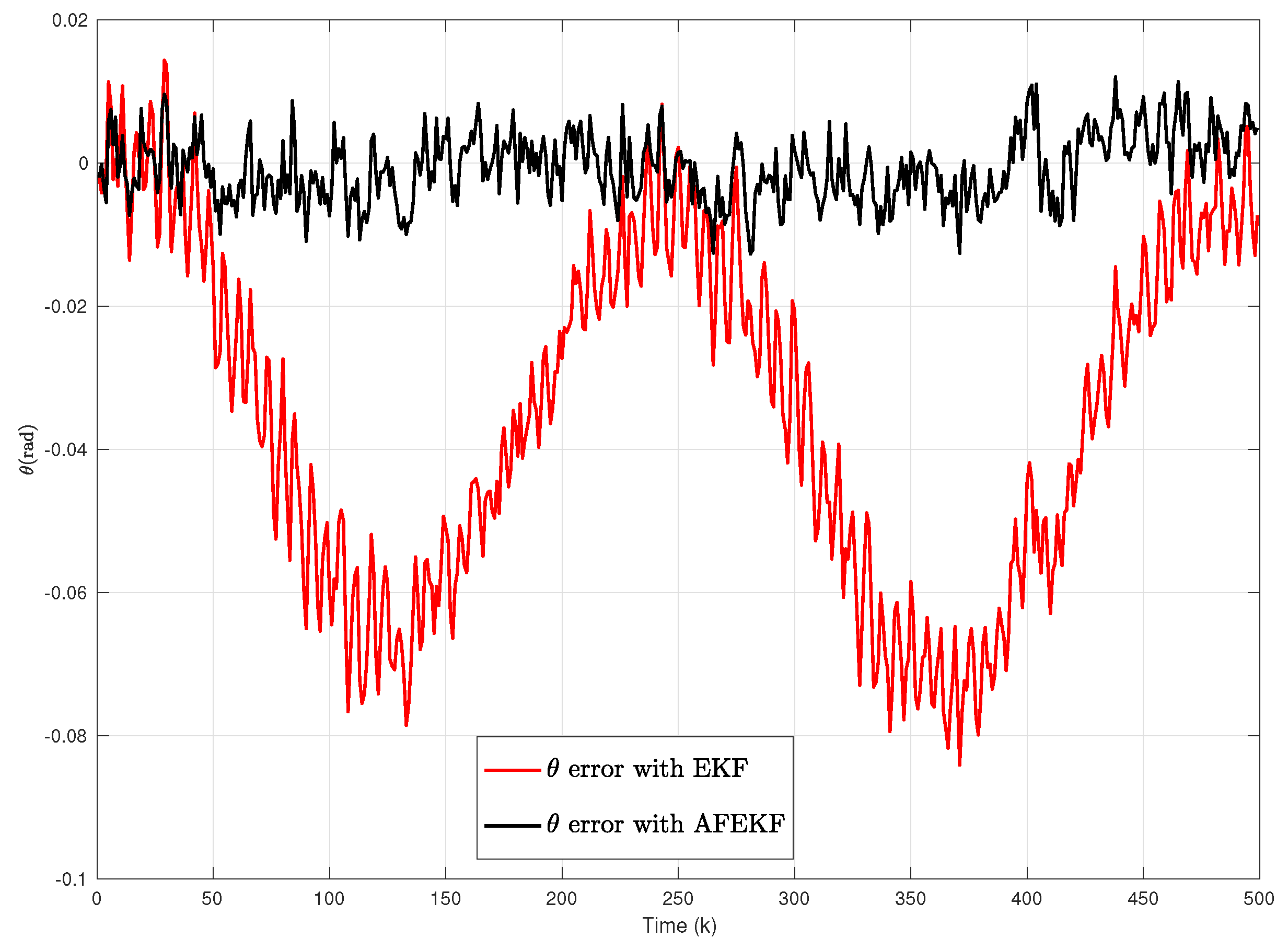
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, S.; Chen, C. Probabilistic fuzzy system for uncertain localization and map building of mobile robots. IEEE Trans. Instrum. Meas. 2012, 61, 1546–1560. [Google Scholar] [CrossRef]
- Fankhauser, P.; Bloesch, M.; Hutter, M. Probabilistic terrain mapping for mobile robots with uncertain localization. IEEE Robot. Autom. Lett. 2018, 3, 3019–3026. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Kim, B.; Kim, H.; Ha, R.; Cha, H. Inertial sensor-based indoor pedestrian localization with minimum 802.15.4a configuration. IEEE Trans. Ind. Inform. 2011, 7, 455–466. [Google Scholar] [CrossRef]
- Yang, F.; Wang, Z.; Lauria, S.; Liu, X. Mobile robot localization using robust extended H∞ filtering. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2009, 223, 1067–1080. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Shen, B. Mobile robot localization under stochastic communication protocol. Kybernetika 2020, 56, 152–169. [Google Scholar]
- Guan, R.P.; Ristic, B.; Wang, L.; Moran, B.; Evans, R. Feature-based robot navigation using a Doppler-azimuth radar. Int. J. Control 2017, 90, 888–900. [Google Scholar] [CrossRef]
- Khyam, M.O.; Rahim, M.N.A.; Li, X.; Jayasuriya, A.; Mahmud, M.A.; Oo, A.M.T.; Ge, S.S.G. Simultaneous excitation systems for ultrasonic indoor positioning. IEEE Sens. J. 2020, 20, 13716–13725. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Fantacci, C.; Farina, A.; Graziano, A. A new approach for Doppler-only target tracking. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1616–1623. [Google Scholar]
- Shames, I.; Bishop, A.N.; Smith, M.; Anderson, B.D.O. Doppler shift target localization. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 266–276. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Yang, L.; Ho, K.C. Moving target localization in multistatic sonar by differential delays and Doppler shifts. IEEE Signal Process. Lett. 2016, 23, 1160–1164. [Google Scholar] [CrossRef]
- Guan, R.P.; Ristic, B.; Wang, L.; Evans, R. Monte Carlo localisation of a mobile robot using a Doppler-azimuth radar. Automatica 2018, 97, 161–166. [Google Scholar] [CrossRef]
- Yang, F.; Wang, Z.; Hung, Y.S. Robust Kalman filtering for discrete time-varying uncertain systems with multiplicative noises. IEEE Trans. Autom. Control 2002, 47, 1179–1183. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Karimi, H.R. Variance-constrained resilient H∞ filtering for mobile robot localization under dynamic event-triggered communication mechanism. Asian J. Control 2021, 23, 2064–2078. [Google Scholar] [CrossRef]
- Xie, L. Output feedback H∞ control of systems with parameter uncertainty. Int. J. Control 1996, 63, 741–750. [Google Scholar] [CrossRef]
- Liu, S.; Wang, Z.; Chen, Y.; Wei, G. Protocol-based unscented Kalman filtering in the presence of stochastic uncertainties. IEEE Trans. Autom. Control 2020, 65, 1303–1309. [Google Scholar] [CrossRef]
- Karimi, H.R. A sliding mode approach to H∞ synchronization of master-slave time-delay systems with Markovian jumping parameters and nonlinear uncertainties. J. Frankl. Inst.-Eng. Appl. Math. 2012, 349, 1480–1496. [Google Scholar] [CrossRef] [Green Version]
- Han, Q.-L. On robust stability of neutral systems with time-varying discrete delay and norm-bounded uncertainty. Automatica 2004, 40, 1087–1092. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. Exponential tracking control of robotic manipulators with uncertain dynamics and kinematics. IEEE Trans. Ind. Inform. 2019, 15, 689–698. [Google Scholar] [CrossRef]
- Mu, C.; Zhang, Y. Learning-based robust tracking control of quadrotor with time-varying and coupling uncertainties. IEEE Trans. Neural. Netw. Learn. Syst. 2020, 31, 259–273. [Google Scholar] [CrossRef]
- Karimi, H.R.; Lu, Y. Guidance and control methodologies for marine vehicles: A survey. Control Eng. Pract. 2021, 111, 104785. [Google Scholar] [CrossRef]
- Xia, Q.; Ming, R.; Ying, Y.; Shen, X. Adaptive fading Kalman filter with an application. Automatica 1994, 30, 1333–1338. [Google Scholar] [CrossRef]
- Geng, J. Adaptive estimation of multiple fading factors in Kalman filter for navigation applications. GPS Solut. 2008, 12, 273–279. [Google Scholar] [CrossRef]
- Kim, K.H.; Jee, G.I.; Park, C.G.; Lee, J.G. The stability analysis of the adaptive fading extended Kalman filter. Int. J. Control Autom. Syst. 2009, 7, 49–56. [Google Scholar] [CrossRef]
- Bicer, C.; Babacan, E.K.; Ozbek, L. Stability of the adaptive fading extended Kalman filter with the matrix forgetting factor. Turk. J. Electr. Eng. Comput. Sci. 2012, 20, 819–833. [Google Scholar]
- Haghighi, M.S.; Pishkenari, H.N. Real-time topography and Hamaker constant estimation in atomic force microscopy based on adaptive fading extended Kalman filter. Int. J. Control Autom. Syst. 2021, 19, 2455–2467. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Yang, P. Adaptive H∞ Kalman filter based on multiple fading factors and its application in unmanned underwater vehicle. ISA Trans. 2021, 108, 295–304. [Google Scholar] [CrossRef] [PubMed]
- Zerdali, E.; Yildiz, R.; Inan, R.; Demir, R.; Barut, M. Improved speed and load torque estimations with adaptive fading extended Kalman filter. Int. Trans. Electr. Energy Syst. 2021, 31, e12684. [Google Scholar] [CrossRef]
- Campion, G.; Bastin, G.; Dandrea-Novel, B. Structural properties and classification of kinematic and dynamic models of wheeled mobile robots. IEEE Trans. Robot. Autom. 1996, 12, 47–62. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Lu, Y.; Shen, B.; Shen, Y. Recursive filtering for mobile robot localization under an energy harvesting sensor. Asian J. Control 2021. [Google Scholar] [CrossRef]
- Lu, Y.; Karimi, H.R. Recursive fusion estimation for mobile robot localization under multiple energy harvesting sensors. IET Contr. Theory Appl. 2021. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Lu, Y.; Karimi, H.R. Adaptive Fading Extended Kalman Filtering for Mobile Robot Localization Using a Doppler–Azimuth Radar. Electronics 2021, 10, 2544. https://doi.org/10.3390/electronics10202544
Li B, Lu Y, Karimi HR. Adaptive Fading Extended Kalman Filtering for Mobile Robot Localization Using a Doppler–Azimuth Radar. Electronics. 2021; 10(20):2544. https://doi.org/10.3390/electronics10202544
Chicago/Turabian StyleLi, Bin, Yanyang Lu, and Hamid Reza Karimi. 2021. "Adaptive Fading Extended Kalman Filtering for Mobile Robot Localization Using a Doppler–Azimuth Radar" Electronics 10, no. 20: 2544. https://doi.org/10.3390/electronics10202544
APA StyleLi, B., Lu, Y., & Karimi, H. R. (2021). Adaptive Fading Extended Kalman Filtering for Mobile Robot Localization Using a Doppler–Azimuth Radar. Electronics, 10(20), 2544. https://doi.org/10.3390/electronics10202544