
Selective Disinfection Based on Directional Ultraviolet Irradiation and Artificial Intelligence

 ,
,
Abstract
:
1. Introduction
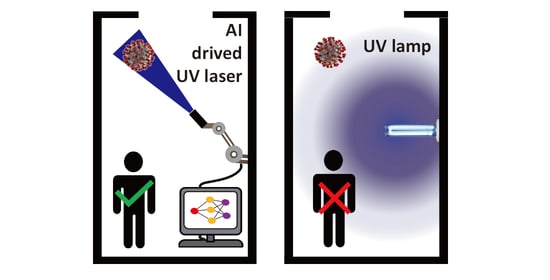
1.1. Virus Disinfection
1.2. Laser vs. Diode//Commerical UV Disinfection Use
1.3. Theoretical Laser Specifications
1.4. Hardware Subsystem
1.5. Software Subsystem
2. System Implementation
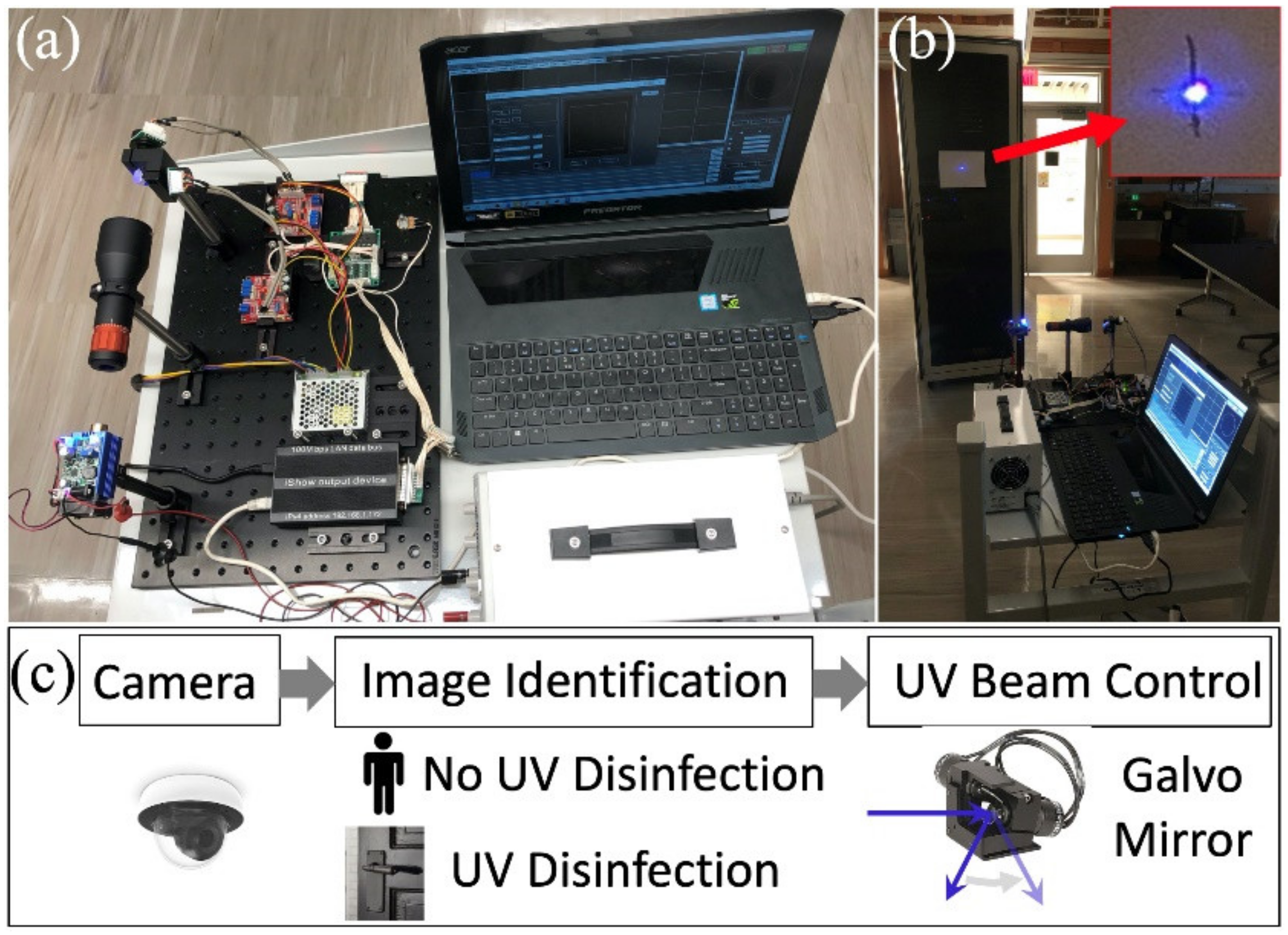
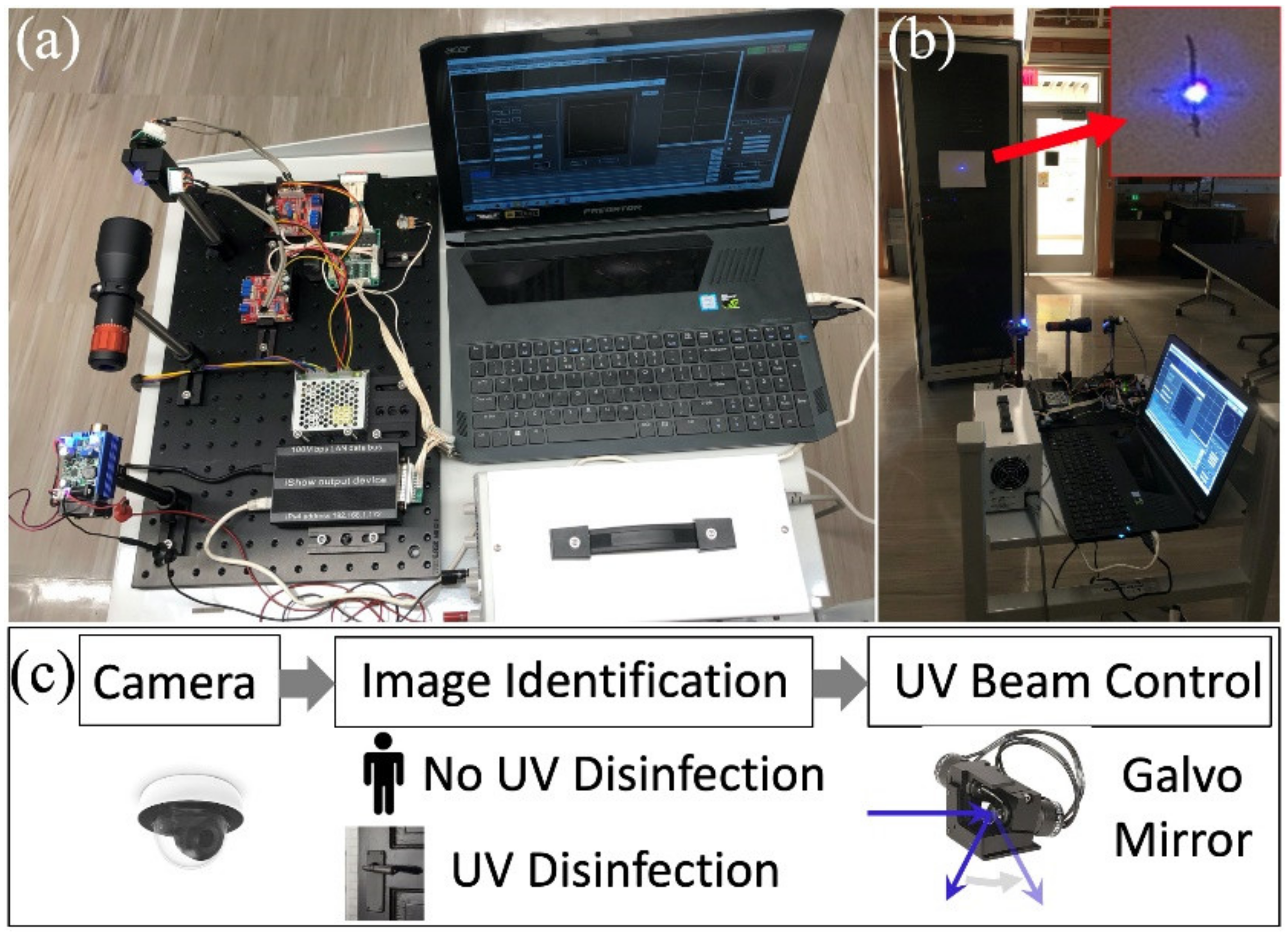
2.1. System Overview
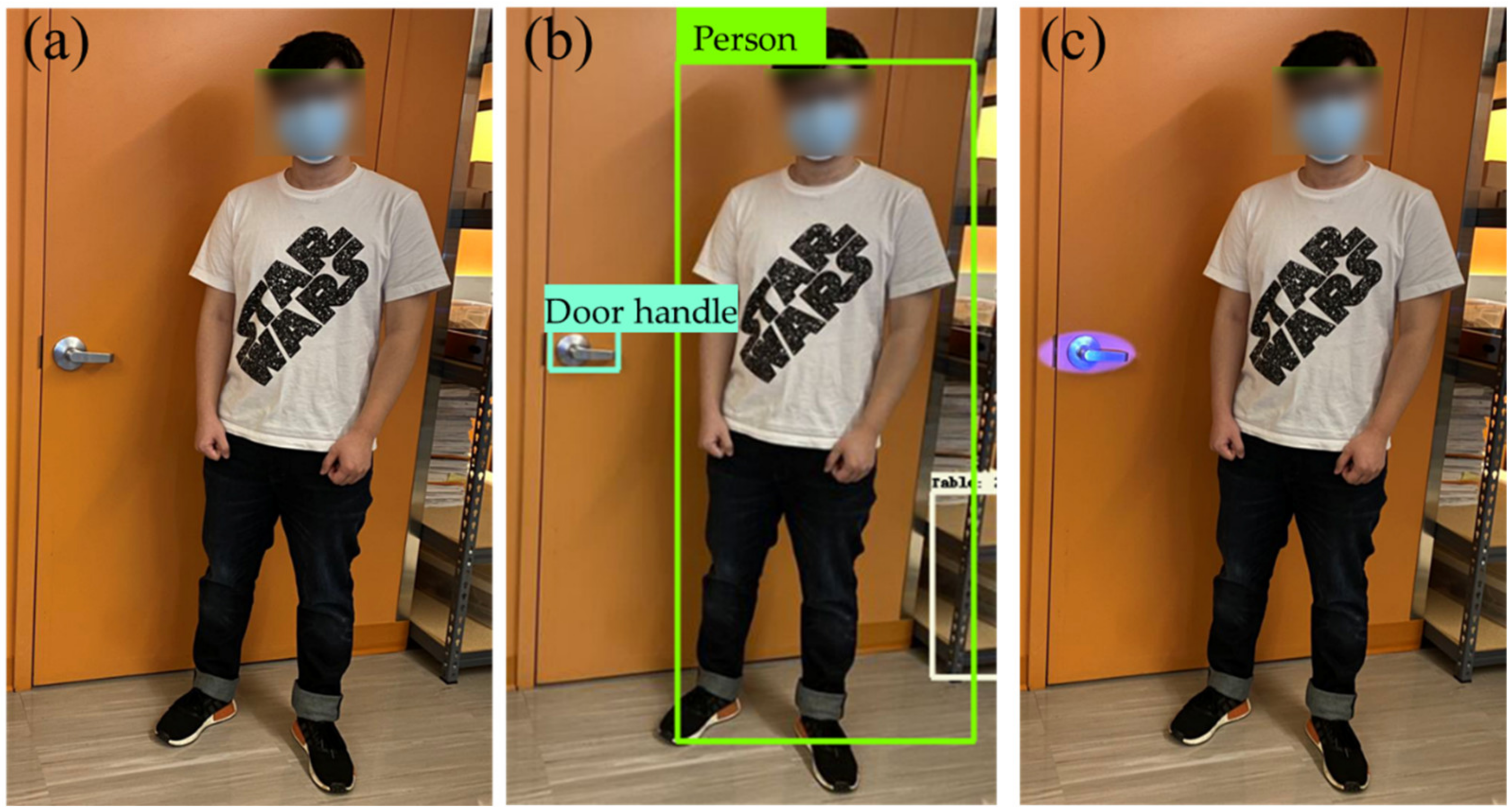
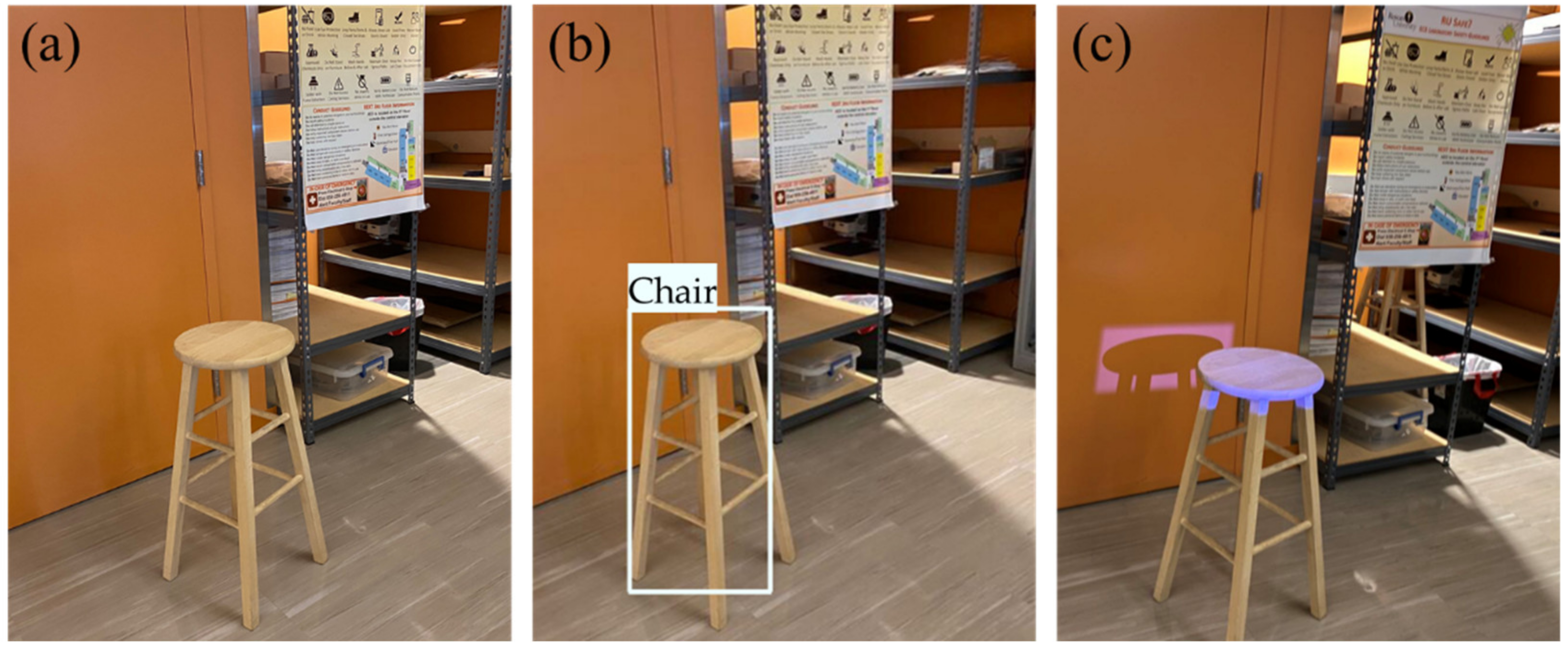
2.2. Deep Learning Algorithm
2.3. Saftey Considerations
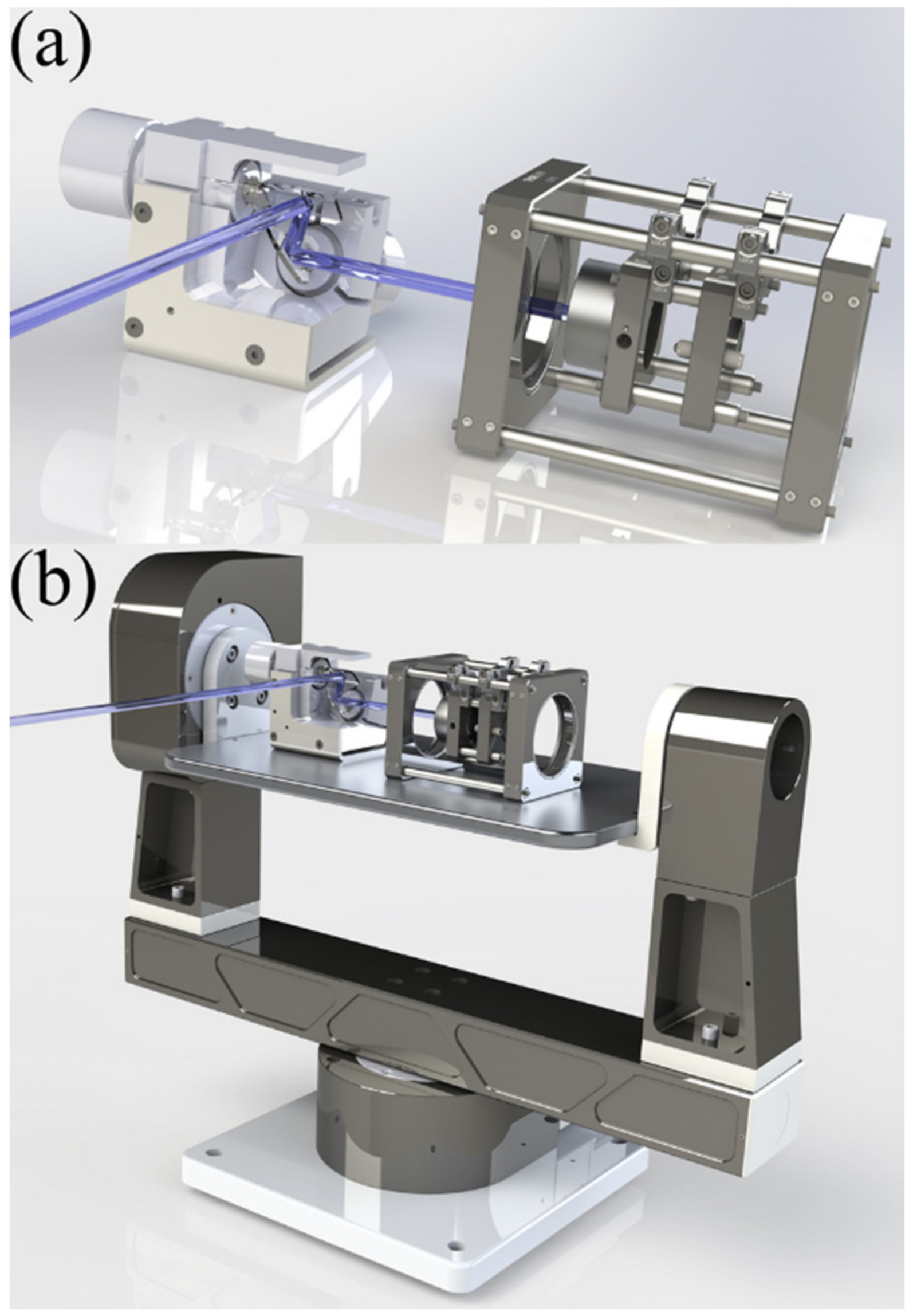
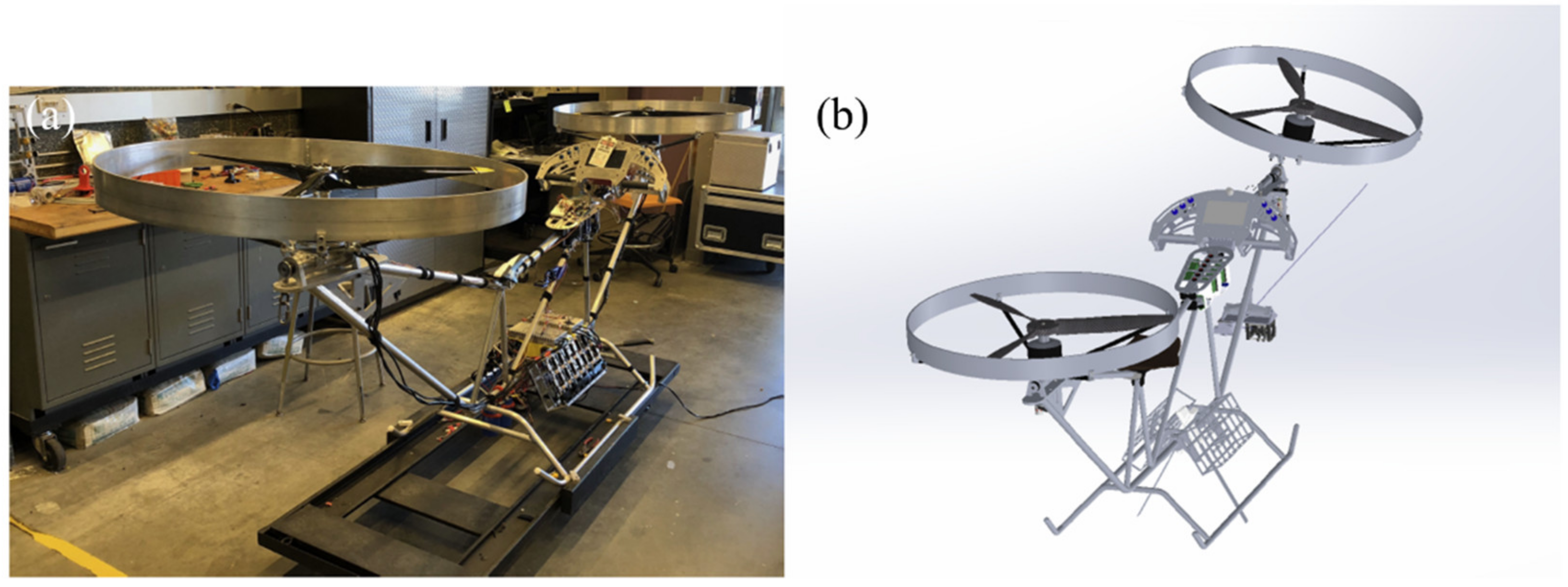
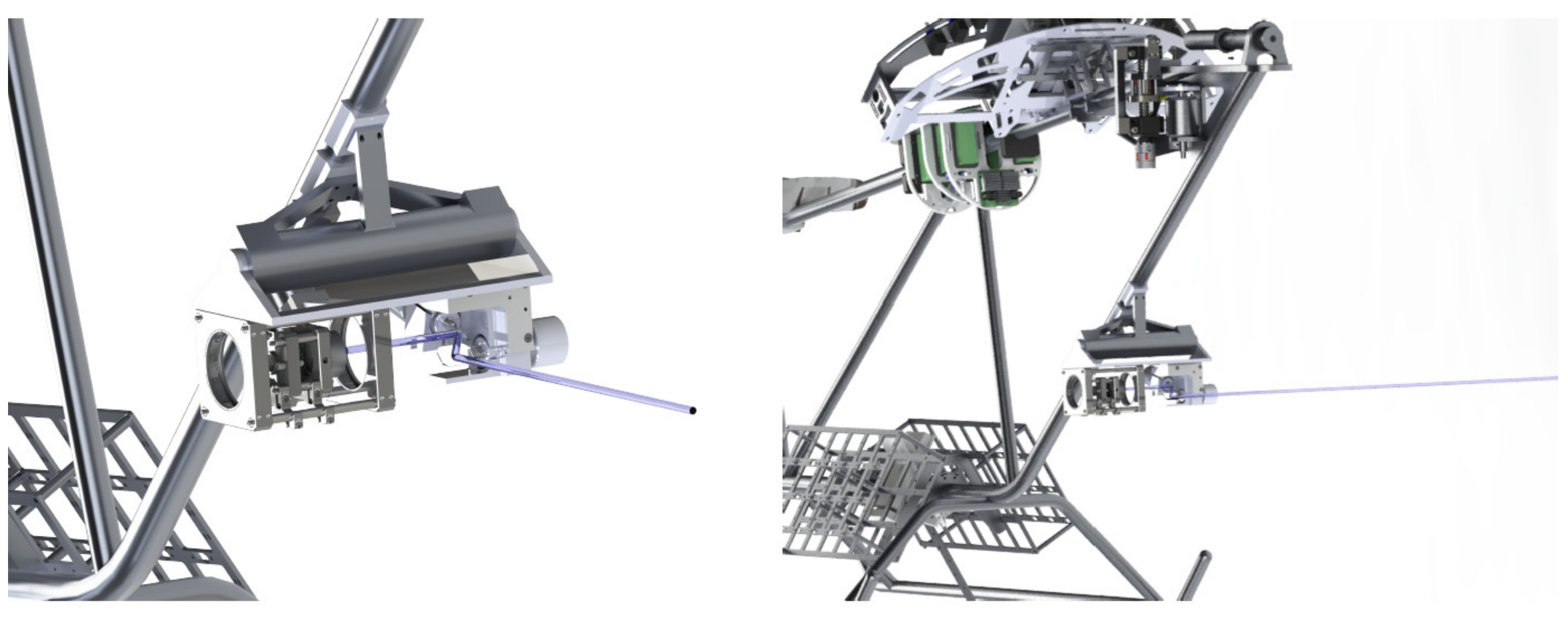
2.4. Mounting System
3. Results and Analysis
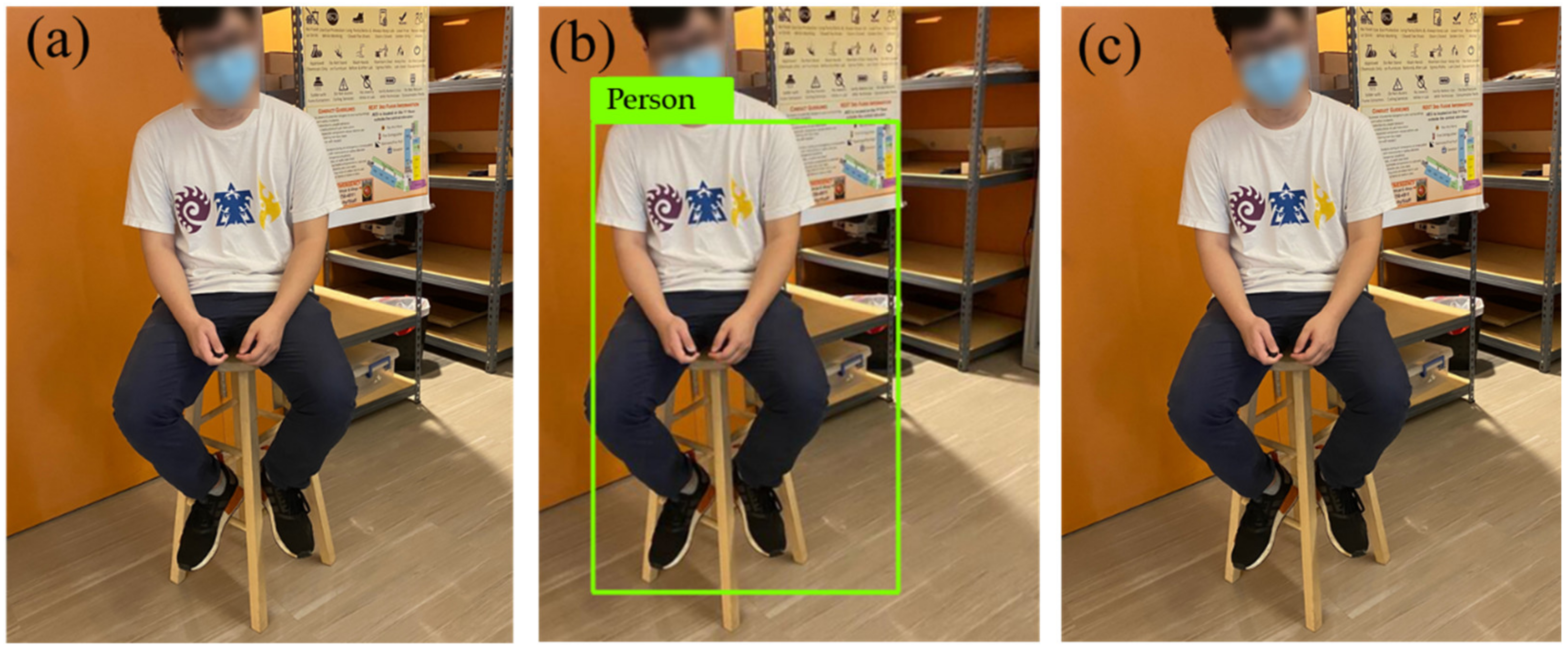
3.1. Image Recognition Results
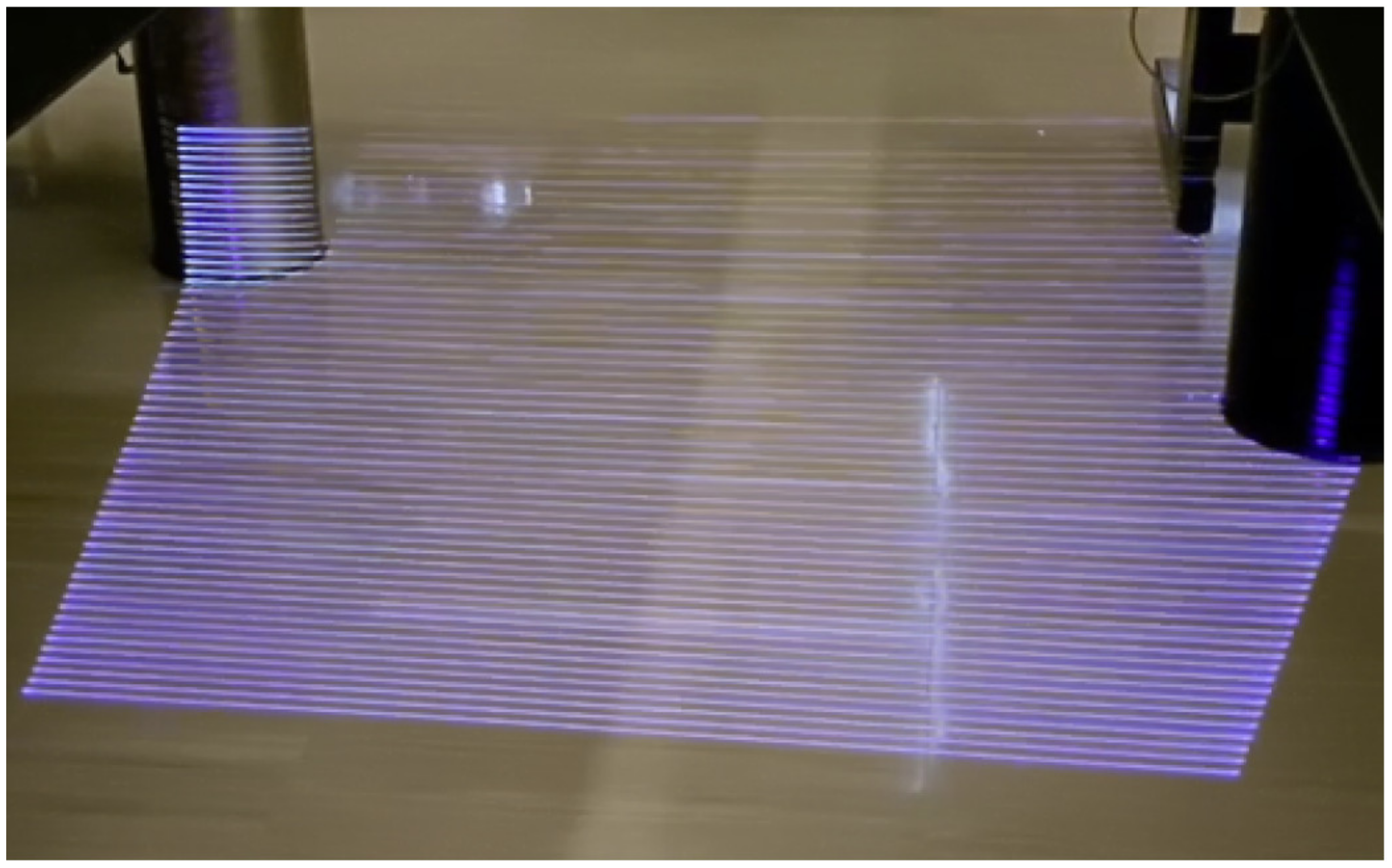
3.2. Laser Galvanometer Results
3.3. Simulated Use Case and Mounting System
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gidari, A.; Sabbatani, S.; Bastianelli, S.; Pierucci, S.; Busti, C.; Bartolini, D.; Stabile, A.M.; Monari, C.; Galli, F.; Rende, M.; et al. SARS-CoV-2 Survival on Surfaces and the Effect of UV-C Light. Viruses 2021, 13, 408. [Google Scholar] [CrossRef] [PubMed]
- Mara, B.; Bianco, A.; Giovanni, P.; Adalberto, C.; Cavatorta, C.; Claudio, F.; Galli, P.; Luigi, L.; Manuela, L.; Enrico, T.; et al. UV-C irradiation is highly effective in inactivating SARS-CoV-2 replication. Sci. Rep. 2021, 11, 1–7. [Google Scholar]
- Raeiszadeh, M.; Adeli, B. A critical review on ultraviolet disinfection systems against COVID-19 outbreak: Applicability, validation, and safety considerations. ACS Photonics 2020, 7, 2941–2951. [Google Scholar] [CrossRef]
- Storm, N.; McKay, L.G.; Downs, S.N.; Johnson, R.I.; Birru, D.; de Samber, M.; Willaert, W.; Cennini, G.; Griffiths, A. Rapid and complete inactivation of SARS-CoV-2 by ultraviolet-C irradiation. Sci. Rep. 2020, 10, 1–5. [Google Scholar]
- Inagaki, H.; Saito, A.; Sugiyama, H.; Okabayashi, T.; Fujimoto, S. Rapid inactivation of SARS-CoV-2 with deep-UV LED irradiation. Emerg. Microbes Infect. 2020, 9, 1744–1747. [Google Scholar] [CrossRef] [PubMed]
- Casini, B.; Tuvo, B.; Cristina, M.L.; Spagnolo, A.M.; Totaro, M.; Baggiani, A.; Privitera, G.P. Evaluation of an ultraviolet C (UV-C) light-emitting device for disinfection of high touch surfaces in hospital critical areas. Int. J. Environ. Res. Public Health 2019, 16, 3572. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McDevitt, J.J.; Stephen, N.R.; Lewis, J.R. Aerosol susceptibility of influenza virus to UV-C light. Appl. Environ. Microbiol. 2012, 78, 1666–1669. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leung, K.C.P.; Ko, T.C.S. Improper use of the germicidal range ultraviolet lamp for household disinfection leading to phototoxicity in COVID-19 suspects. Cornea 2021, 40, 121–122. [Google Scholar] [CrossRef] [PubMed]
- Boardman, E.A.; Huang, L.S.W.; Robson-Hemmings, J.J.; Smeeton, T.M.; Hooper, S.E.; Heffernan, J. Deep ultraviolet (UV-C) laser for sterilisation and fluorescence applications. Sharp Tech. Rep. 2012, 31. [Google Scholar] [CrossRef]
- Sabino, C.P.; Sellera, F.P.; Sales-Medina, D.F.; Machado, R.R.G.; Durigon, E.L.; Freitas-Junior, L.H.; Ribeiro, M.S. UV-C (254 nm) lethal doses for SARS-CoV-2. Photodiagnosis Photodyn. Ther. 2020, 32, 101995. [Google Scholar] [CrossRef] [PubMed]
- Tiseni, L.; Chiaradia, D.; Gabardi, M.; Solazzi, M.; Leonardis, D.; Frisoli, A. UV-C Mobile Robots with Optimized Path Planning: Algorithm Design and On-Field Measurements to Improve Surface Disinfection Against SARS-CoV-2. IEEE Robot. Autom. Mag. 2021, 28, 59–70. [Google Scholar] [CrossRef]
- Chui, H.C.; Juang, S.S.Y.; Lin, H.Y.; Huang, C.H.; Liao, H.H. Ultraviolet Laser Sterilization System. U.S. Patent 9,061,083, 23 June 2015. Filed 7 July 2014. [Google Scholar]
- Mackenzie, D. Ultraviolet light fights new virus. Engineering 2020, 6, 851. [Google Scholar] [CrossRef] [PubMed]
- Zaccone, G.; Karim, M.R.; Menshawy, A. Deep Learning with TensorFlow; Packt Publishing Ltd.: Birmingham, UK, 2017. [Google Scholar]
- Kuznetsova, A.; Rom, H.; Alldrin, N.; Uilings, J.; Krasin, I.; Pont-Tuset, J.; Kamali, S.; Popov, S.; Malloci, M.; Kolesnikov, A.; et al. The Open Images Dataset V4: Unified image classification, object detection, and visual relationship detection at scale. Int. J. Comput. Vis. 2020, 128, 1956–1981. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. CVPR 2016, 770–778. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. NIPS 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, L.; Li, X.; Gao, L. A transfer convolutional neural network for fault diagnosis based on ResNet-50. Neural Comput. Appl. 2020, 32, 6111–6124. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. ECCV 2014, 740–755. [Google Scholar] [CrossRef] [Green Version]
- He, T.; Zhang, Z.; Zhang, H.; Zhang, Z.; Xie, J.; Li, M. Bag of tricks for image classification with convolutional neural networks. CVPR 2019, 558–567. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thorlabs: Standard 60 mm Cage Plates. Available online: https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=3021 (accessed on 4 March 2020).
- Systems N: GM-12 Gimbal Mount. Available online: https://www.newmarksystems.com/gimbal-mounts/gm-12-gimbal/ (accessed on 2 February 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Classes | Label Name |
|---|---|
| 1 | Light switch |
| 2 | Door handle |
| 3 | Chair |
| 4 | Table/Desk |
| 5 | Counter-top |
| 6 | Computer mouse |
| 7 | Computer keyboard |
| 8 | Person |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zierdt, B.; Shi, T.; DeGroat, T.; Furman, S.; Papas, N.; Smoot, Z.; Zhang, H.; Wu, B. Selective Disinfection Based on Directional Ultraviolet Irradiation and Artificial Intelligence. Electronics 2021, 10, 2557. https://doi.org/10.3390/electronics10202557
Zierdt B, Shi T, DeGroat T, Furman S, Papas N, Smoot Z, Zhang H, Wu B. Selective Disinfection Based on Directional Ultraviolet Irradiation and Artificial Intelligence. Electronics. 2021; 10(20):2557. https://doi.org/10.3390/electronics10202557
Chicago/Turabian StyleZierdt, Ben, Taichu Shi, Thomas DeGroat, Sam Furman, Nicholas Papas, Zachary Smoot, Hong Zhang, and Ben Wu. 2021. "Selective Disinfection Based on Directional Ultraviolet Irradiation and Artificial Intelligence" Electronics 10, no. 20: 2557. https://doi.org/10.3390/electronics10202557
APA StyleZierdt, B., Shi, T., DeGroat, T., Furman, S., Papas, N., Smoot, Z., Zhang, H., & Wu, B. (2021). Selective Disinfection Based on Directional Ultraviolet Irradiation and Artificial Intelligence. Electronics, 10(20), 2557. https://doi.org/10.3390/electronics10202557