Abstract
As radio-frequency (RF) based wireless energy harvesting technology can provide remote and continuous power to low-power devices, e.g., wireless sensors, it may be a substitute for batteries and extend the lifetime of the wireless sensor networks. In this paper, we propose a wireless energy harvesting localization system (WEHLoc), which contains batteryless wireless sensors as anchors and an energy access point (E-AP) to transfer power to the anchors. We consider a passive target localization scenario, in which the anchors monitor the target and send the sensed ranging data back to the E-AP. Additionally, we formulate the optimal estimation accuracy problem which is a 0–1 mixed-integer programming problem and relates to the energy beam, target transmitted power, and deployed anchor density. Then, we develop the power allocation scheme of the E-AP to solve the objective. In order to reduce the complexity, we propose a heuristic method that converts the maximum estimation accuracy problem into the energy efficiency problem and use linear programming to solve them. The simulations demonstrate that WEHLoc can be massively deployed in a wide area, and the estimation error and the power consumption are relatively low.
1. Introduction
Locating and tracking the target are important topics for wireless sensor networks (WSNs) especially in GPS denied environments, e.g., buildings, urban canyons, under tree canopies, or caves [1]. However, prolonging the lifetime of sensors with limited energy is a crucial issue [2]. Energy efficiency schemes are applied to keep the wireless sensors in a low energy cost mode [3,4]. However, no matter how we design the energy efficiency schemes for WSN systems, the batteries still will be inevitably depleted in the end. Although the batteries can be replaced or recharged, it is inconvenient, costly, or even dangerous for a large-scale deployed network in a harsh environment.
In recent years, radio frequency (RF) based wireless power transfer (WPT) technique has gain a lot of attention in both academia and industry [5]. It has become a promising solution for low power and small devices and can effectively solve the energy bottleneck of wireless networks or wireless sensor networks [6]. Consequently, simultaneous wireless information and power transfer (SWIPT) systems harvest wireless energy to power up the wireless devices in order to transmit data [7]. In addition to the fundamental research [8,9,10], WPT has been applied in many typical applications and wireless sensor devices, e.g., RFID [11], body area networks [12], and underground sensor networks [13]. An important application is the implant device for biomedical applications, which employs wireless power to supply the energy for the devices with body [14,15]. Additionally, Naderiparizi et al. demonstrated that a visual data transfer sensor using WPT can achieve a high transmission rate [16]. Therefore, WPT is a promising and feasible solution for wireless communications and applications, and it will benefit the wireless localization system as a new type of energy supplier.
Since the sensors nodes are equipped with the energy harvesting components, localization techniques are essential to such system. On one hand, the sensor networks need to know the exact positions of the passive sensor nodes which are not always active without WPT energy. Such position information may help the network manage the nodes and allocate resources efficiently [17]. On the other hand, these passive sensor can also provide location-based services as if they were activated. Thus, how to control the remote wireless power to achieve the goals of some specific localization requirements is a critical issue [18].
In this paper, we investigate a localization framework of a wireless sensor network, where no batteries are equipped in the wireless sensors (or anchors), and the MIMO-based wireless energy access point (E-AP) provides the remote energy to power up these anchors. The target periodically broadcasts the signals and the anchors collect such signals and send them back to the E-AP in order to track the target. Such a wireless energy harvesting localization system (WEHLoc) can be deployed on a large scale since the anchors are relatively cheap and small [17]. Additionally, WEHLoc can be seen as a typical application for SWIPT [19], since the uplink data carries the ranging measurements of the target. Such a system can be implemented by the commercial facilities, e.g., PowerCast, in which the passive sensors attain the energy from the remote transmitter and send the data back to the wireless gateway [17]. Compared with the traditional energy-constrained wireless localization systems, e.g., GPS, cell-based localization system [20], sensor networks [21], wide-band wireless localization network [22], or MIMO-based localization systems [23], WEHLoc breaks the bottleneck of power constraints. In addition, the batteryless anchors are the extensions of the E-AP and they are suitable for large area monitoring. Several researchers have already implemented real passive sensors to provide localization functions. In [24], the harvested energy is converted into UWB signals by rectifying the received waveform and motivating the UWB chips. Pannuto et al. achieved 30 cm positioning accuracy with UWB based backscatter module [25]. Fantuzzi et al. designed a circuit that turns the UHF signal into UWB TDOA ranging [26].
With a given WEHLoc system, wireless power is the major control scheme for all the anchors, and the system model should consider two propagation models with the wireless power beam simultaneously, since it is a typical application of SWIPT and used for localizations. The first one is the formulation of power propagation from E-AP to anchors, and the second one is the formulation of localization estimation accuracy. Thus, the power allocation not only influences the received power of the anchors, but also leads to the estimation performance changes. In this paper, the equivalent Fisher information matrix (EFIM) is introduced as the fundamental tool to formulate the problems and use squared position error bound (SPEB) as the major metric for evaluation, which are widely applied in many studies [18,27,28]. The main contributions are three fold:
- First, we use EFIM to formulate an analytical framework of WEHLoc and derive the SPEB as the localization performance metric. Within this framework, the wireless power, network topology, signal to noise ratio (SNR), prior information, and non-line-of-sight (NLOS) are fully considered and integrated. The formulation indicates that the localization accuracy relies on the target transmitted power and the network topology. Additionally, the wireless power beam directly actives parts of the anchors and further influences the network topology.
- In the second contribution, we jointly consider minimizing the estimation error and power consumption from E-AP. Thus, we formulate the wireless power allocation problem as a multi-objective optimization problem, which contains the optimal SPEB and optimal energy efficiency problems. Within the objective, the wireless power beam is the parameter of the step functions which are independent of some other parameters. Thus, achieving the optimal estimation and energy efficiency are independent of fixing some constraints. Then, we divide the multi-objective optimization into two sub-problems. In addition, we also prove that such problem formulation is also suitable for multi-target localization.
- The third contribution is that we develop a 0–1 mixed integer programming to obtain the optimal solution. Both the optimal estimation accuracy and energy efficiency can be achieved. In order to reduce the complexity of the optimization method in a large-scale network, we also design a heuristic algorithm by setting a fixed batch of used anchors and relaxing the minimum SPEB as a maximum trace of EFIM. Then, the objectives are further simplified to linear programming methods. Based on our proposed method, the anchor uncertainty problem is also formulated, and the related robust algorithm is also developed.
Our proposed schemes are evaluated by extensive simulations, where the estimation accuracy and energy efficiency performance are analyzed. During the simulation, we observe several factors that will influence the estimation and energy consumption, e.g., target transmitted power, anchor density, wireless power beam, and the number of used anchors in the proposed algorithms. The results demonstrate that our proposed optimization scheme can achieve the optimal estimation accuracy and the minimum energy consumption with given wireless power constraints simultaneously. Additionally, the heuristic method can approach the optimal estimation with the minimum energy consumption.
2. System Model
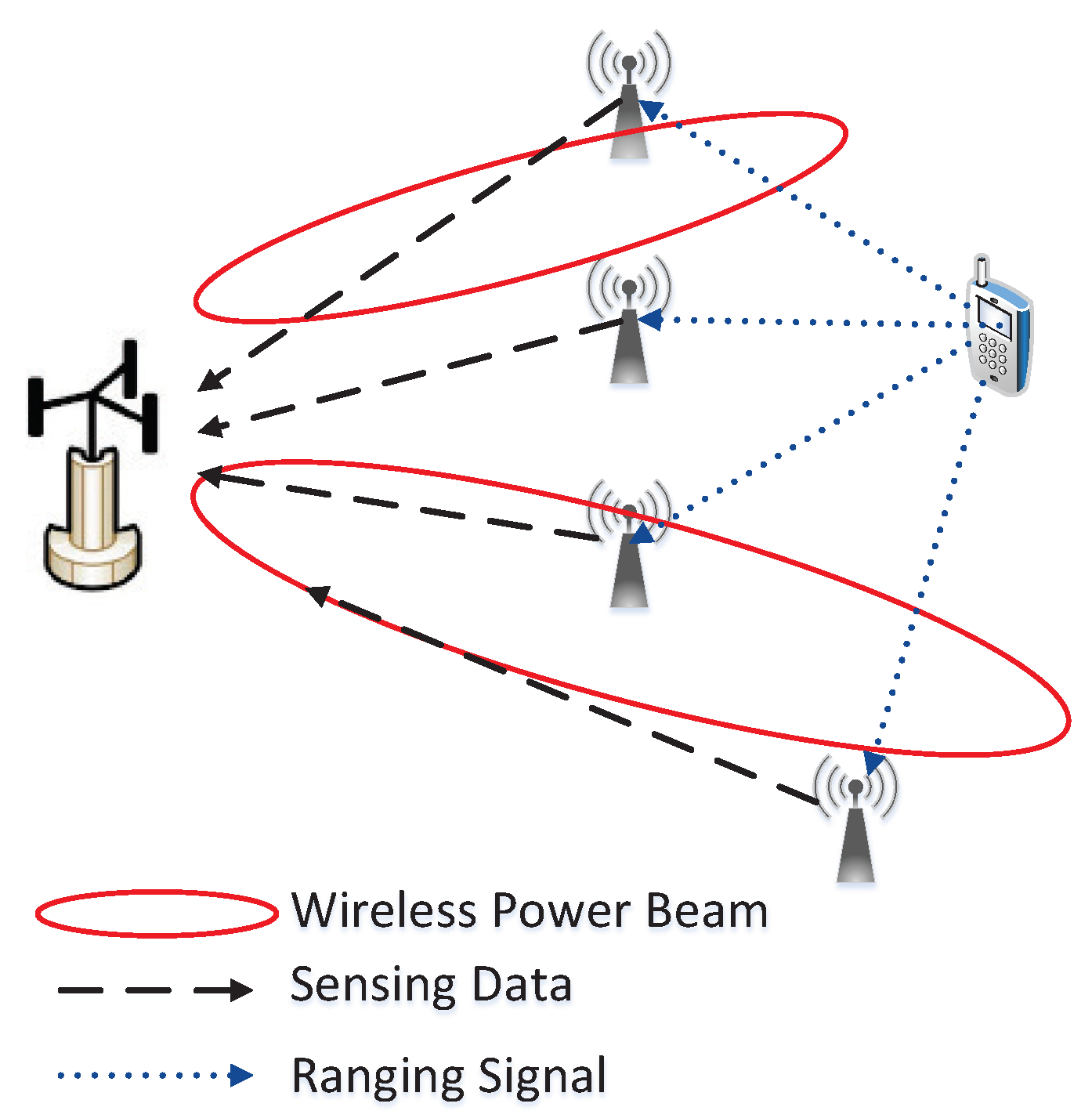
The architecture of WEHLoc can be divided into three parts, which are energy access point (E-AP), batteryless anchors, and the targets. The E-AP contains multiple antennas and provides a wireless power beam to power up the batteryless anchors. Such anchors are equipped with antennas to capture the microwave from E-AP, and the rectifiers convert the microwave into the direct current. Then, a supercapacitor for each anchor stores the energy of the current which guarantees sufficient energy is collected for sensing, processing, encoding, and transmitting. Considering a low power chip in such a system, e.g., BLE communications which only require mW power to work, the harvested energy is enough to execute such procedure. Thus, the batteryless anchors are used to send the sensing data back to the E-AP when they gain enough energy. The targets only broadcast periodic ranging signals to the anchors, and WEHLoc continuously monitors and tracks their positions by gathering the ranging measurements from anchors. Note that the anchors start sensing when enough energy is gained. Then, such energy can guarantee that the anchors can collect all the targets ranging information, encode them and transmit to the E-AP to remote locate these targets. Since the ranging information is a periodically short data packet, the anchors have the ability to address the information sequentially during the sensing period. After transmitting the data, the energy stored in the supercapacitors is released. Then, no energy is left until E-AP broadcasts the wireless power waves in the next period. The E-AP is a core module in the WEHLoc, which contains wireless power transfer, receiving ranging data from anchors, localization, computing, and power allocation functions. Therefore, the communication, wireless power transfer, and computing functions are integrated in the E-AP. The localization and power allocation schemes are executed in E-AP when the ranging signals arrive. E-AP decodes the signal and extracts the ranging information. Then it employs a typical localization algorithm, e.g., NLLS or Kalman filter, to derive the target position. Therefore, the microwave transmission in WEHLoc contains wireless power beam from E-AP to anchors, uplink sensing data from anchors to the E-AP, and broadcasting ranging signal from the target to anchors as illustrated in Figure 1.
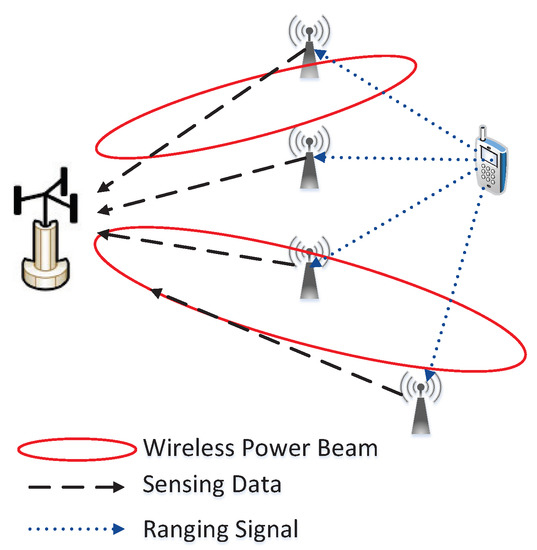
Figure 1.
The architecture of WEHLoc.
Since the wireless power beam will influence the sensing data from the batteryless anchors and further determine the localization accuracy, the system model will focus on the wireless power propagation and the formulation of the localization accuracy. Thus, the impact of wireless power allocation is considered for energy efficiency purposes. The energy consumption for localization algorithms mainly occurs within the E-AP, which is independent of the wireless power allocation. In this case, such parts of energy consumption are beyond our scope.
In the WEHLoc, there are K antennas equipped in the E-AP and form an antenna array. Each anchor is equipped with a single omnidirectional antenna. The number of deployed anchors is N and these anchors are without batteries. Let be the downlink wireless power beam channel matrix from the E-AP to the anchors, and define as the channel coefficient between the k-th antenna of the E-AP and the n-th anchor.
For the anchors, we use to indicate the n-th anchor’s 2D position and use to indicate the target’s position. Let be the line-of-sight (LOS) range (or distance) between the n-th anchor and the target and be the nonline-of-sight (NLOS) range, where is the NLOS path error and indicates the Euclidean distance between two vectors. The WEHLoc can locate multiple targets simultaneously and independently, and we assume there is only one target to simplify the following analysis.
2.1. Wireless Power Beam
The E-AP generates orthogonal signal vector to form a wireless power beam, where . The anchors are activated by such signals. Additionally, the power of each signal is defined by , where . Then we obtain the the transmit power vector . On the anchor side, the received signal for n-th anchor is:
where is the additive noise which follows zero-mean Gaussian distribution. For the wireless power beam, we assume that the received energy is mainly from the E-AP, and is too small to power up the device, which can not be collected as the energy source. Then, the received power of the n-th anchor is attained:
where is the channel power gain vector for the n-th anchor, is the transmitter power vector of , and . By defining , we have:
2.2. Sensing Data
For the n-th anchor, if the received energy exceeds a typical threshold, it can be activated to sense the ranging signal from the target and sends back the sensing data to the E-AP. Such a requirement is the constraint to guarantee the wireless power can turn on the anchor and the anchor still has enough power to feedback the ranging data. In each sensing slot, we assume that some anchors accumulate enough energy and can only sense the target once. Then, the anchors encode the sensed signal into a fixed packet, then transmit the data packet back to the E-AP. Since the size of sensing data is fixed, the received energy should guarantee that the sensing data signal is still above the minimum required received power of the E-AP. In this case, the received power constraint should follow:
where is the power fading co-efficiency due to the uplink channel from the n-th anchor and the E-AP. After sending the data back to the E-AP, all the remaining energy will be lost since there are no energy storage devices in the sensors.
2.3. Ranging Signal
For a successfully activated anchor, the sensing data is the measurement of the ranging signal. Consider that the target broadcasts the ranging signal to the surrounding anchors periodically with a fixed power, the anchors will not send the sensing data back to the E-AP until they capture the ranging signal. We assume the anchors and the targets are coarsely synchronized, in which the anchors can sense the ranging signal within a broadcasting slot. For the low-power devices, we only use the received signal strength as the ranging measurements. Thus, we can formulate the observation as follows:
where is the received signal from n-th anchor and contains the ranging information, is the transmitted power of the target, is the real distance between the n-th anchor and the target, is the path loss factor, and is the additive background noise which follows zero-mean Gaussian distribution . Here, we assume a free-space flat fading channel, and the noise follows the Gaussian distribution. It is clearly observed that the ranging signal is independent of the energy beam if the anchors are activated. The anchors just need to send the ranging measurement results back to the E-AP with sufficient energy. Additionally, the usage of wireless power beam is to activate the anchors to transmit the sensing data.
3. Problem Formulation
3.1. Localization Performance Metric
To evaluate the localization performance, the mean square error (MSE) or root mean square error (RMSE) are employed. As the common indicator, the Cramér–Rao lower bound (CRLB) is a prime metric for localization performance. The CRLB indicates the optimal performance of the localization for any unbiased algorithm. If an unbiased algorithm is well designed, its estimation covariance will achieve the CRLB. However, CRLB is a covariance matrix. Thus, we employ the squared position error bound (SPEB) as the localization accuracy metric, which is the trace of CRLB and derived from the equivalent Fisher information matrix (EFIM) [29]:
where is the CRLB. Thus, we employ the CRLB and related SPEB to indicate the general performance of WHELoc and which algorithm is applied is not considered. Since the SPED relies on the EFIM, we firstly derive the EFIMs of the WEHLoc by considering the ranging data in two scenarios: the first one is full of the line-of-sight (LOS) ranging signals and the second one is with parts of nonline-of-sight (NLOS) ranging signals, which are given by:
where is the angle-of-arrival (AOA) matrix to indicate the network topology, with denoting the AOA from the n-th anchor to the target; is the noise level and is the SNR on the receiver side, which relates to the ranging error; indicates the number of NLOS ranging signals, and is a step function to indicate whether the n-th anchor is powered up:
The detailed derivation which only considers the LOS ranging can be found in Appendix A. For NLOS ranging, the formulation without prior information is attained in (14) in [29], and related proof in Proposition 1 [29] indicates that the NLOS ranging can be deviated without prior information and draw the similar FIM formuation for only LOS ranging. In this case, the NLOS ranging does not contribute to , which draws similar conclusion from [30]. Therefore, we mainly consider the LOS ranging for analysis and power allocation scheme.
Note that, the FIM formulation is a theoretical analysis, in which the AOA is considered to be known to the system. Then, the fundamental limits of the localization performance can be attained and the optimization strategies can be implemented. Additionally, it is also observed that the prior information matrix is independent of and the power allocation mainly focus on adapting . Thus, the strategies are designed only according to .
3.2. Multi-Objective Optimization
With a given transmit power constraint, the power allocation strategy is to achieve both the minimum location estimation error and the minimum power consumption simultaneously. Such multi-objectives can be solved when a group of sufficient anchors is powered up while minimizing the Tx power to guarantee each anchor gains enough energy. Then the system follows two basic practical constraints: the first one is the transmit power, which should not exceed a constant value and the individual power of each antenna is a non-negative value; the second constraint is that the received power of activated anchors should not be smaller than a fixed threshold , which is the minimum received power after sensing the ranging signal and sending the data back on the E-AP side. Thus, the objectives are expressed as follows:
where is the sum of E-AP transmit power constrains. It is clearly observed that is to achieve both the optimal localization accuracy and the energy efficiency. For the localization accuracy optimization, the objective is complex and not convex, especially there are several step functions , which are discontinuous and cannot be solved directly by convex optimization algorithms. However, the energy efficiency optimization is a linear programming if is given and the optimal localization is achieved. Therefore, we divide into two sub-problems, which are optimal localization and optimal energy efficiency problems.
3.3. Multi-Target Localization
For multiple target localizations, the EFIM is the linear combination of each individual target, which is . And is the target states vector, in which and is the number of targets. Then is reformulated as:
It is clearly observed that the solutions for such multi-object programming do not change much. In this case, we can use the same solutions to solve . To make the simulation clear, we only evaluate single target scenario.
3.4. 0–1 Mixed Integer Programming
As indicated in (9), the optimal localization accuracy is the monotonically nonincreasing function of and is the sum of with . Therefore, achieving the minimum SPEB is to collect the maximum number of and ensure the anchors are powered up, in which . Then, two cases are considered. Firstly, the minimum SPEB should be the value when all the anchors are powered up. This case can be achieved with a greater transmit power of E-AP, which covers all the playing field. For the second case, if all the anchors can not be activated simultaneously, the wireless power beam should point to parts of the anchors. Consequently, the objective, in this case, is just equivalent to power up the maximum anchors around the target with the wireless power beam.
Then we decompose into and , where is pre-determined by the target transmit power and the network topology. Additionally, is the indicator determined by the wireless power beam. Thus, we can simplify the optimal localization accuracy problem by finding proper values of , which is 0–1 integer programming:
where we consider part of the anchors are powered up by the wireless power beam and these anchors form a subset . Then, the power allocation should satisfy for all the active anchors.
If the integer programming is solved, the second sub-problem is to use the minimum wireless power beam to ensure that all the constrains are met. However, it is clearly observed that the system does not need the maximum power to achieve the constraints. Then, we just need to find the minimum transmitted power of E-AP to active the anchors. Thus, the energy minimization can be achieved and it is independent of the 0–1 integer programming:
Due to the partially independent nature, such multi-objective optimization can be divided into two steps: the first step is to search the maximum number of available anchors that achieve the minimum SPEB and the second step is to find the minimum transmitted power to meet the constraints.
Note that, the optimization objectives in our paper are different from the other resource allocation schemes, which fix the power constraints to find the minimum estimation error or fix the localization requirements to attain the minimum transmitted power. It is also not necessary to prove whether the multi-objective optimization problem has a feasible solution, because the priority of attaining the minimum SPEB is higher than achieving the minimum transmit power. We need firstly solve the integer programming and then solve the energy efficiency problem. Since the wireless power of WEHLoc is used to power up the anchors and send the sensing data back to the E-AP, the total transmitted power can be minimized after the available anchors are determined. In this case, both the minimum SPEB and energy consumption can be achieved in a single problem. It is also different to the tradeoff schemes which compromise the localization accuracy and energy efficiency, because the wireless power allocation in WEHLoc is not a continuous function of the SPEB and there is not a scheduling parameter for such tradeoff.
4. Multi-Objective Optimization Algorithms
4.1. Exhaustion Method
Since the objective is 0–1 mixed-integer programming, a direct way is to use the exhaustion method to list all the combinations of and search whether the beamforming vector could satisfy the constraints in (11) [31]. Then, if the beamforming meets the constraints, we can re-schedule the power allocation in order to reduce the total transmitted power.
This problem is divided into two sub-problems, which are 0–1 integer programming and linear programming. Thus, it can be solved in two steps: the first step is to search every combination for and the second step is to find whether there is a feasible solution to meet the constraints. It is clearly observed that the minimum of is achieved when all , otherwise it is the value with most of to be 1. Then, we can consider as the weight of the n-th anchor. And since SPEB is monotonically nonincreasing to , the bigger weight will lead to the smaller SPEB. Here we use the following lemma to convert into a scalar weight of the anchor:
Lemma 1.
The minimum SPEB in can be relaxed to the following maximum trace of EFIM:
Proof.
The detailed derivation can be found in Appendix B. □
Lemma 1 provides a lower bound of SPEB by finding the maximum trace of EFIM. In this case, the minimum of SPEB is approaching if is solved. Consider and , the trace of EFIM is , which is the sum of weights of the anchors. Then, we just need to power up the anchors with heavy weights as many as possible to achieve the minimum SPEB. In this case, the calculation in the loop is significantly reduced since the inverse calculation of is avoided.
The details of the exhaustion algorithm are illustrated in Algorithm 1. Here, we sort the anchors according to in a descent order and use a 0–1 sequence vector to mark the anchors, in which each element (1 or 0) represents the corresponding anchor is activated or not. All the sequence vectors form a sequence set , where lists all the 0–1 combinations. Then, the search begins from setting to . Note that, the minimum SPEB can be directly achieved when the constraints are met with . Thus, the searching starts from in order to reduce the searching time. Then, the constraints are constructed according to the 1 element in , which denotes and the received power should be above the threshold . If the constraints are not able to be achieved, the algorithm will move to in the next loop. During each loop, linear programming is used to find whether the constraints are met and further reduce the transmitted power to the minimum value, and it can be solved by many efficient tools, which are not necessarily detailed. If we can not find a feasible solution, the algorithm will return an empty solution. However, it will not happen since the power beam can reach any anchor in the whole playing field, in which there is at least one anchor that can be activated.
| Algorithm 1 Multi-Objective Optimization (MOO). |
|
4.2. Heuristic Algorithms for High-Density Sensors
The exhaustion method consumes much computational overhead. If the number of anchors is 20, there will be evaluations during the searching in order to attain the optimal solution. For a large number of anchors which are deployed in a wide area, e.g., 10,000 anchors, it is inefficient and unnecessary to search every 0–1 combination. In this case, some heuristic methods which may reduce the complexity are preferred. The key idea of our proposed heuristic algorithm is that we choose a subset of the anchors and attain the power allocation vectors to achieve the minimum energy consumption. Since the anchors are massively deployed in the playing field, we assume the target is surrounded by at least anchors, where is a proper number based on the anchor density and localization requirements. When the subset of anchors is fixed, we just need to solve the energy efficiency issues based on linear programming. Thus, the multi-objective optimization problem turns into linear programming which is much simpler:
In , the first biggest anchors contribute a major proportion of SPEB and other anchors can be ignored. In this case, the theoretical SPEB is fixed and the remaining work is to achieve energy efficiency. The proposed heuristic algorithm is presented in Algorithm 2. Firstly, we sort the anchors according to the weights. Then, we fix the number of used anchors in the heuristic method and choose only anchors with biggest to achieve the maximum trace of EFIM. Since the anchors can be powered up by the wireless power beam as we assumed, the constraints are constructed accordingly. The final step is to attain a feasible solution to achieve the minimum total transmitted power. Note that, if the constraints are not met, the algorithm will return an empty solution and stop. However, we apply this algorithm in a large-scale deployed network, all the chosen anchors can be powered up, and the algorithm will always return a feasible solution. It is also noted that although we attempt to power up the chosen anchors, it does not mean other anchors can not gain wireless energy. Therefore, the actual SPEB should be no higher than the calculation based on our algorithm.
| Algorithm 2 Heuristic Algorithm (HA). |
5. Anchor Uncertainty and Robust Solutions
In addition to the ranging error, the position error of the anchors also affects the localization accuracy, which is defined as the anchor uncertainty. The anchor uncertainty affects the localization performance since the target requires the accurate position information of the anchors. In addition, the channel estimation accuracy from E-AP to passive anchors also relies on the anchor position information. With anchor uncertainty, the system attains inaccurate channel information and leads to an inefficient power allocation scheme. Thus, we consider the anchor uncertainty problem in order to develop a robust algorithm to reduce the impacts of channel estimation errors and localization errors. Here, we define a set which is a circle and the n-th anchor is located in the center. If the radius is defined as , the actual ranging is indicated as:
where is the ranging of the anchor with position error.
In the anchor uncertainty scenario, a robust algorithm is developed which considers the worst case of :
Considering the relationship between and the trace of FIM, we have:
In this case, the minimum trace of FIM is the range with the maximum . After determining the minimum trace value, we can execute the same algorithms to attain the final results.
6. Simulations
Our proposed power allocation schemes are evaluated by various simulations. In the simulations, we assume that there is only one E-AP and several anchors are randomly deployed around the E-AP. A single target is walking around the effective localization playing field. The E-AP transmits the beamformed power signals to the anchors and the anchors sense the ranging signals from the target, and send the sensing data back to the E-AP. Then, the E-AP locates the target according to these signals. Although there are some off-the-shelf products that can harvest energy while communicating, the localization functions are still lacking. Thus, we can only apply simulations to evaluate our schemes and set the commonly used parameters to approach the actual environment. The E-AP is equipped with eight MIMO antennas. The signal carrier frequency is 2.4 GHz and the maximum total transmitted power of E-AP is 30 dBm (1 W). We assume a free space propagation model of the wireless power transfer channel. The minimum received power from anchors is −90 dBm, which ensures the E-AP can decode the data successfully. Additionally, the background noise for anchors is −100 dBm. According to the above analysis, the NLOS ranging will not contribute to the EFIM value, thus we only focus on the performance evaluation in the LOS scenario. The prior information is also not considered in the simulation, since the power allocation has little impact on it.
We employ two metrics for performance evaluations simultaneously: the first one is the SPEB, which indicates the estimation accuracy; the second one is the total transmitted power of the E-AP, which indicates the energy efficiency level. Since SPEB is introduced in the simulation as the optimal localization performance indicator, the dedicated localization performance for some specific algorithms are not considered in this paper. The multi-objective optimization (MOO) algorithm and heuristic algorithm (HA) are evaluated in the simulation. We compare our schemes with the equally assigned power scheme, which is indicated as Equal in the simulation. Additionally, the maximum total transmit power constraint in the simulation is 30 dBm, and Equal uses the fixed power with 30 dBm. Firstly, the MOO is compared with Equal with only a few anchors. Since the computational overhead of MOO is increasing significantly by the number of anchors, thus the playing field for MOO evaluation is small and the number of anchors is limited. Then, we evaluate the SPEB and energy consumption of HA with massively deployed anchors. The playing area is about 1 km and the maximum number of used anchors is 10,000 for large-scale evaluation. In the following simulations, the results are obtained via 10,000 Monte-Carlo simulations and averaged in each scenario.
6.1. Multi-Objective Optimization Evaluation
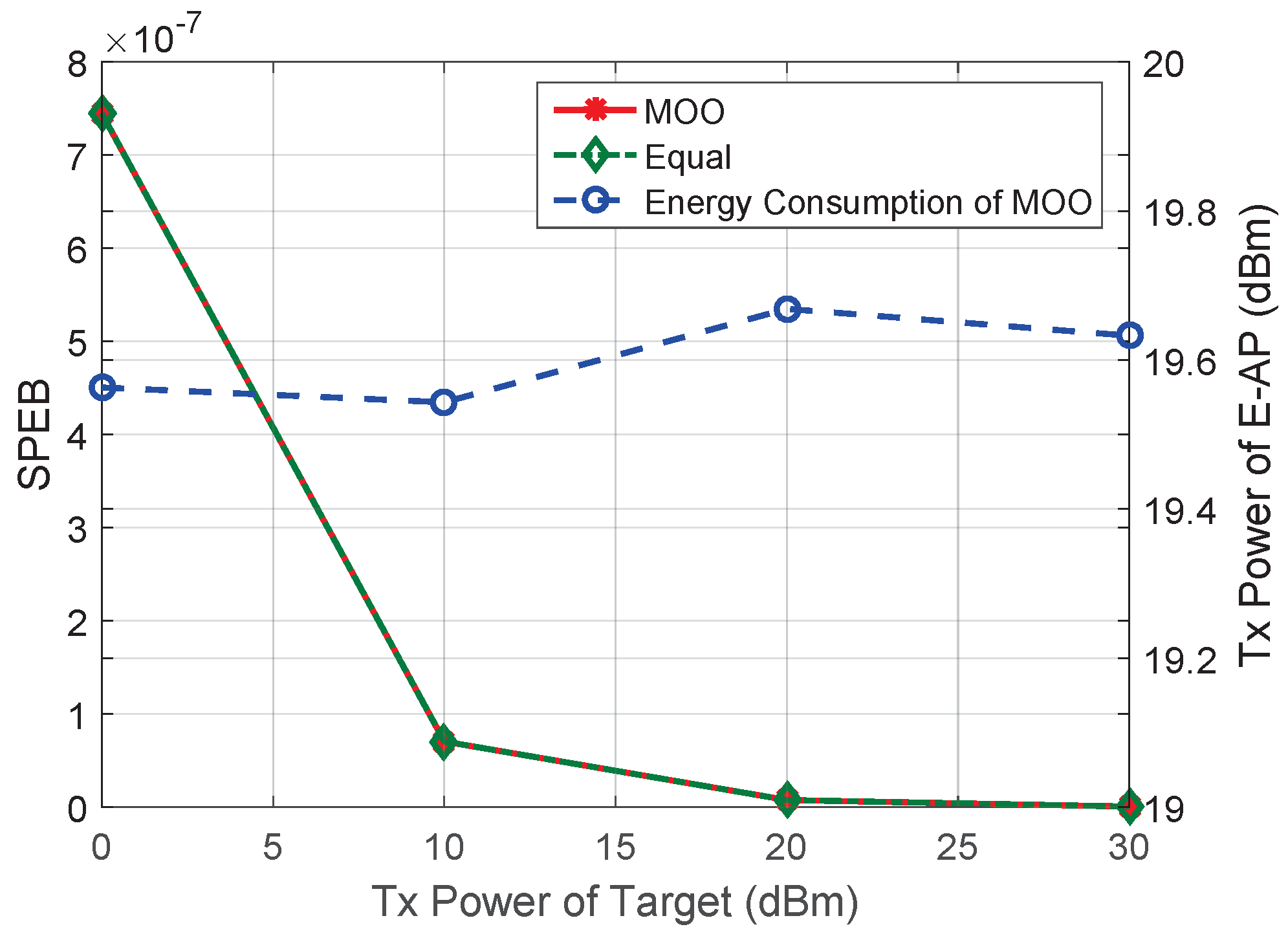
In the MOO evaluation, we deploy only 20 anchors in a 500 × 500 m playing field, since massive anchors will increase the computational overhead significantly and not improve the SPEB much, which will be demonstrated later. As observed in (7), the target transmit power is the dominant factor to determine the estimation accuracy. Thus, we first evaluate the impact of target transmit power.
The results are demonstrated in Figure 2, where the y-axis on the left side is the SPEB values and the y-axis on the right side indicates the power consumption of our proposed algorithm. Firstly, it is observed that the SPEBs of MOO and Equal are overlapped and drop with the increased target transmit power. This is because both MOO and Equal are the power allocation schemes instead of the localization schemes. If MOO and Equal can power up the same anchors, the SPEBs rely only on the target transmit power as indicated in (7), where is independent of MOO and Equal. If both MOO and Equal share the same anchors with the same , the SPEBs are the same. However, the power consumption of MOO and Equal are quite different. The results indicate that the power transfers of both MOO and Equal cover the playing field and activate anchors. In this case, all anchors contribute the estimation and the same accuracy is attained. In WHELoc, the target contains its own battery and sends the ranging signal periodically on its own. Such a signal does not rely on the Tx power of E-AP. In addition, the beamforming of E-AP only indicates whether the anchors can send the sensing data back, it will just allocate the minimum power and propagate to the anchors. Thus, it is observed that the total transmit power of E-AP changes only a little bit between 19.4 dBm and 19.7 dBm, which is not a significant value. Such Tx power change of E-AP mainly due to the anchor-target topology changes since our evaluation is a Monte-Carlo simulation, which may introduce some variances. Additionally, the results indicate that the energy efficiency is achieved with MOO, which is about 19.6 dBm and lower than 30 dBm in Equal.
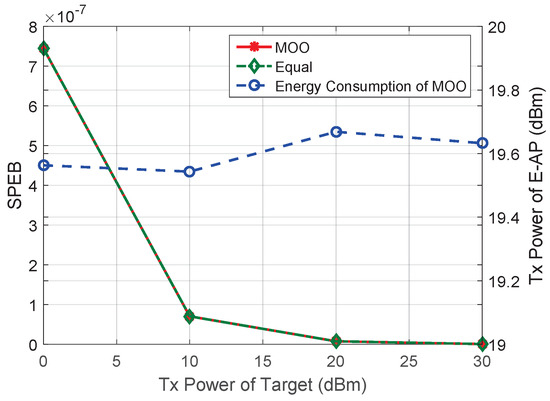
Figure 2.
Optimal evaluation of the target transmit power.
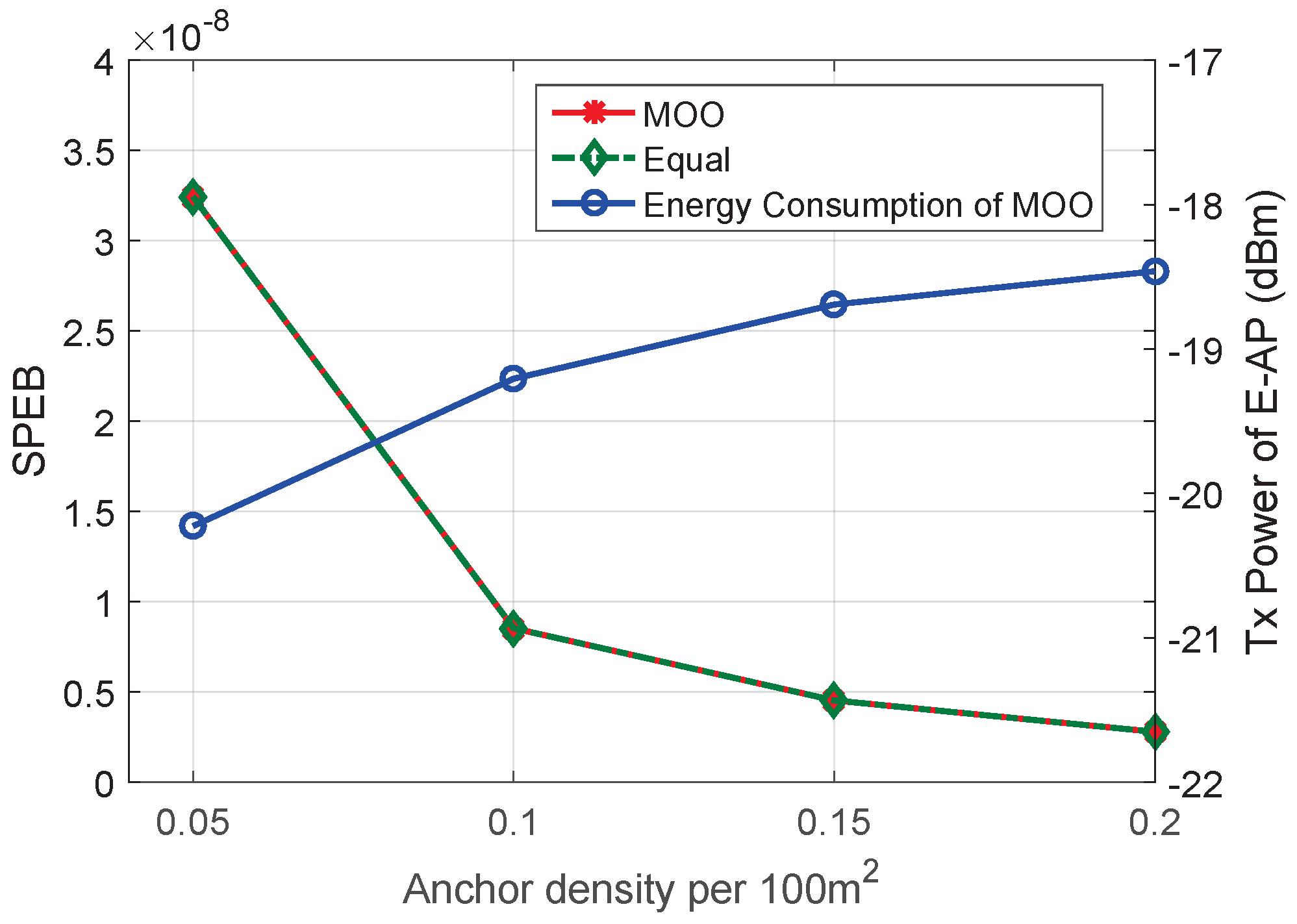
Then, we fix the target transmit power as 30 dBm, the E-AP transmit power constrain as 30 dBm, and the playing area as 100 × 100 m. Then, we adapt the deployed anchor from 5 to 20 in order to increase the anchor density of the playing field. The SPEBs and energy consumption of E-AP are illustrated in Figure 3, where SPEBs of MOO and Equal are still overlapped and decreased with a higher anchor density. However, the energy consumption of E-AP is increased, because more anchors are powered up. Comparing Figure 2 and Figure 3, we find that the energy consumptions are largely related to the areas of the playing field. If we deploy the anchors in a large area, more wireless power is required in order to propagate such power to reach the remote anchors. As illustrated in Figure 2 and Figure 3, Equal can achieve the same SPEB to MOO when the Tx power of E-AP can activate all the anchors simultaneously, since the minimum SPEB is achieved when all the anchors contribute their ranging measurements. Without considering the energy efficiency optimization, we can use Equal as the indication of the optimal estimation performance if the Tx power of E-AP is high enough. Then, we employ Equal as the optimal indicator to compare with HA.
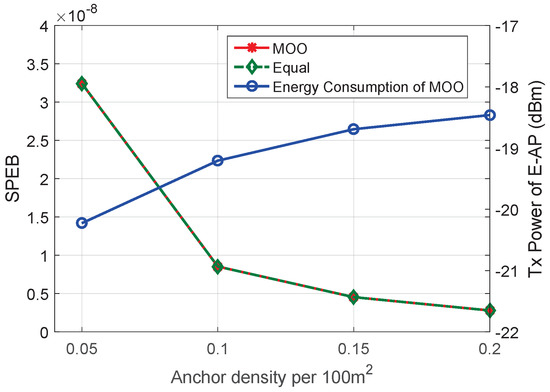
Figure 3.
Optimal evaluation of anchor density.
6.2. Massive Anchor Evaluation
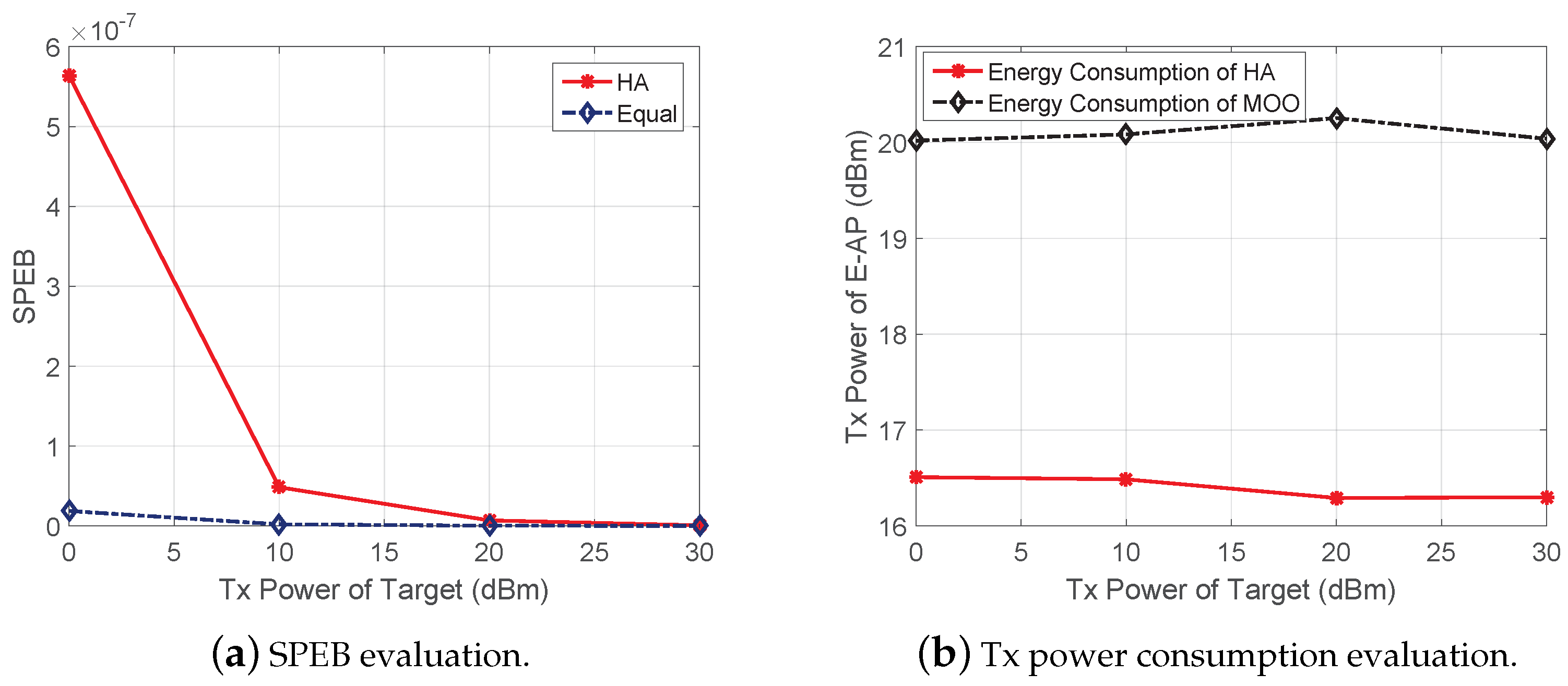
Next, we extend the playing field to 10 10 m and deploy 10 anchors randomly to evaluate the massive anchor scenario. In this simulation, we evaluate the SPEB and power consumption of the HA. We compare HA with the optimal solutions. However, the complexity of MOO is rather high. Thus, we adapt the Tx power of Equal to ensure all the anchors are powered up, and derive the SPEB as the optimal indicator. Then, we employ the linear programming in MOO to attain the minimum Tx power of E-AP when all the anchors are powered up. In HA, we only consider the constraints for 30 anchors with the biggest weight and derive the minimum Tx power of E-AP for energy efficiency. Firstly, we test the performances of target Tx power, which are presented in Figure 4a. It is clearly observed that Equal slightly outperforms HA thanks to the wide coverage with higher Tx power. In addition, HA only needs to power up 30 anchors and Equal can power up all of the anchors, which leads to the minimum SPEB. The power consumptions are presented in Figure 4b, in which HA is lower than MOO. In addition, the power consumption of HA gains similar results in Figure 2, which is also independent of the target transmit power.
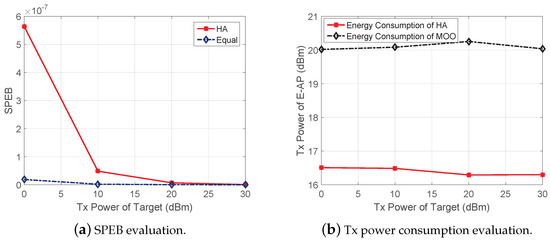
Figure 4.
Performance evaluation of different target transmit power using massive deployed anchors.
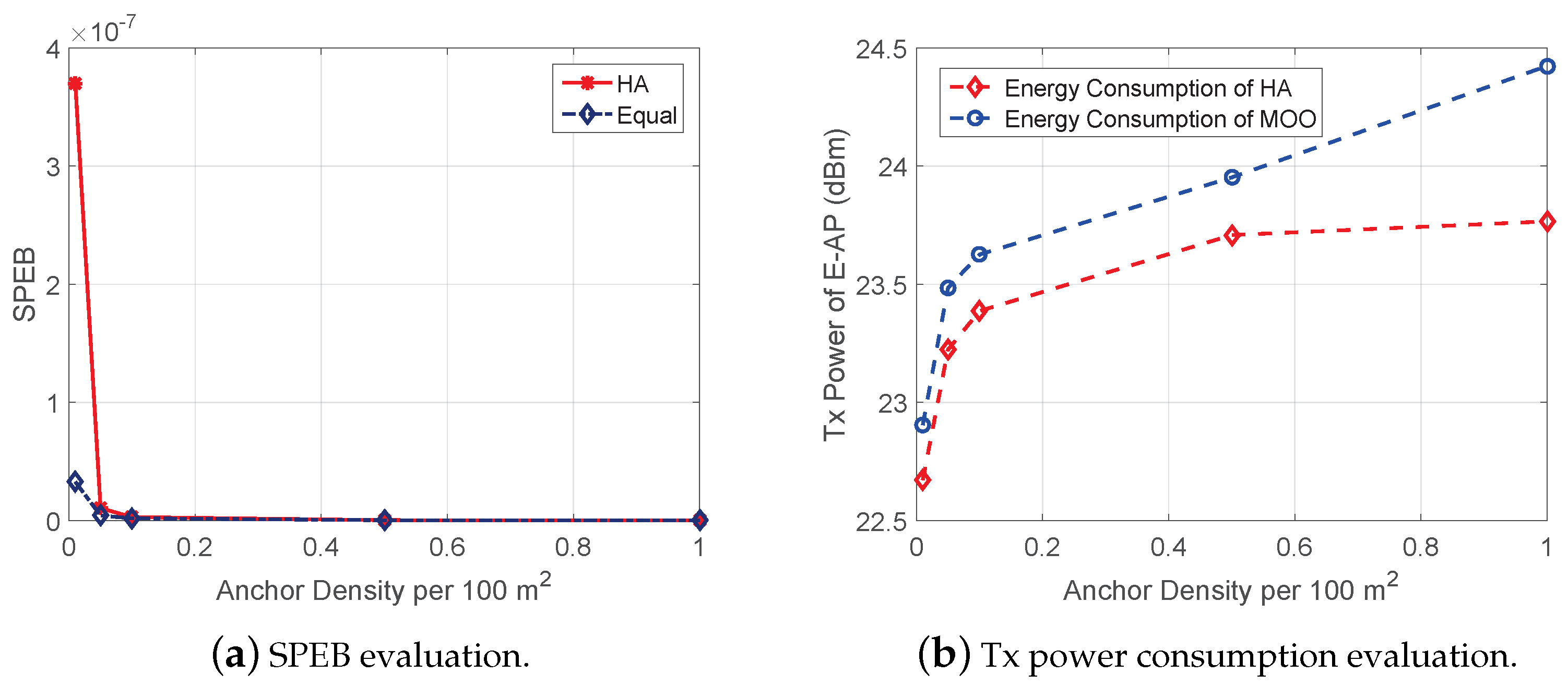
Similar to Figure 3, we also fix the playing area and Tx powers of the target and E-AP. Then, we adapt the number of deployed anchors from 100 to 10,000, which makes the anchor density range from 0.01 to 1 per 100 m. When the anchor density is extremely low, which is 0.01 per 100 m, the SPEB of HA is larger than Equal, as shown in Figure 5a. When the anchor density is increased, both SPEBs of HA and Equal converge together to a quite small value. However, higher anchor density requires more power transfer as illustrated in Figure 5a and the energy consumption level is much greater than in Figure 3 due to a much larger playing field. Thus, it is unnecessary to deploy so many anchors to achieve a more accurate estimation. According to our simulation, the anchor density is about 0.1 to 0.2 per 100 m in order to achieve an acceptable estimation accuracy.
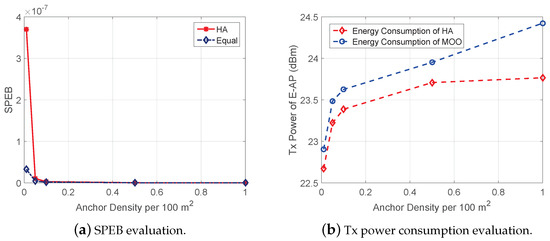
Figure 5.
Performance evaluation of different anchor densities.
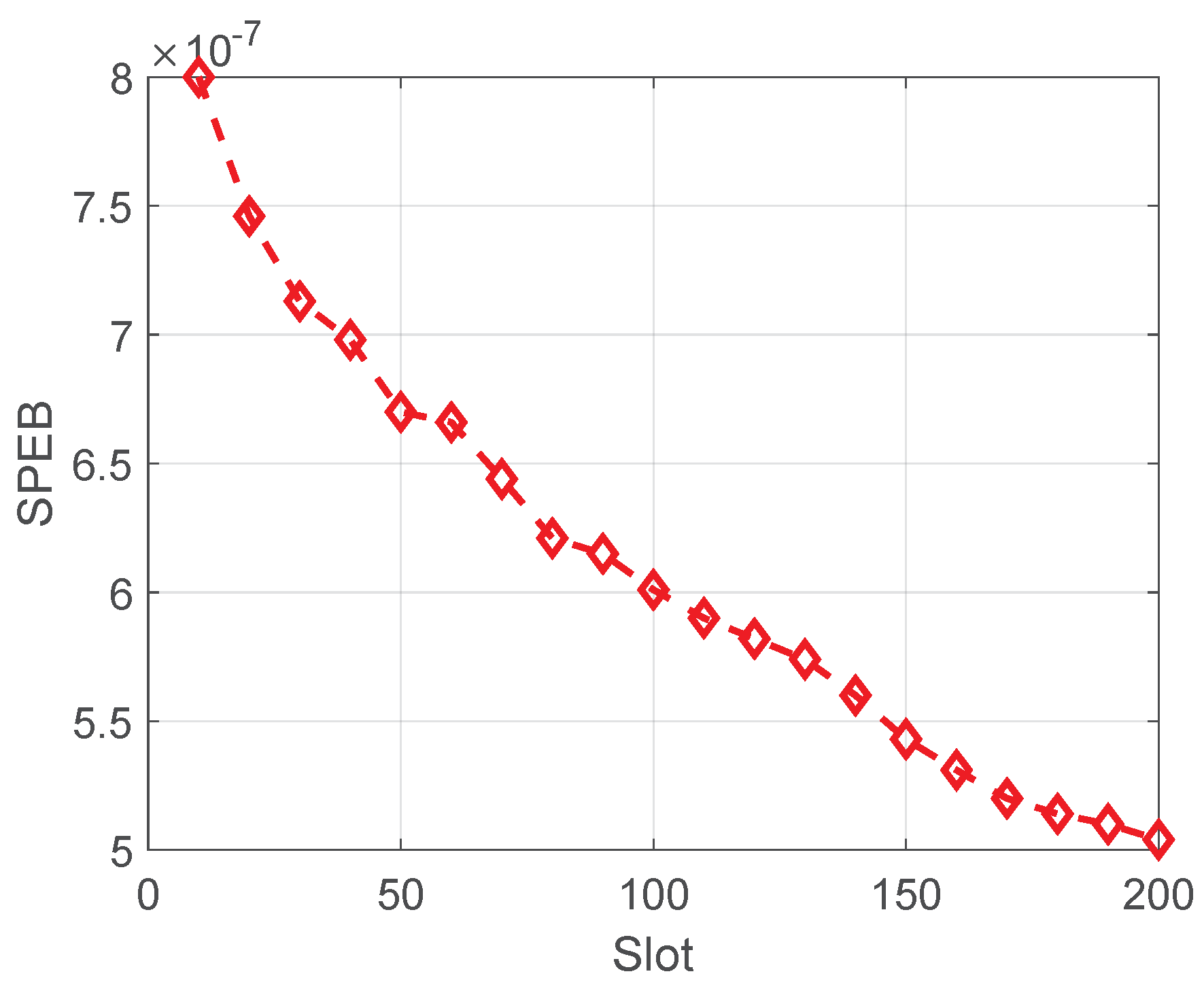
Then, we fix the anchor density as 0.1 per 100m, and evaluate a moving object with a random slow velocity. For dynamic target tracking problems, there are three typical scenarios. The first scenario is the static target localization. In this case, the anchors and E-AP have enough time to sense and process the target signal. Then, our EFIM formulations and power allocation schemes can solve this problem as the above simulations indicate. The second scenario is the target tracking with a low velocity, which is the most common case in a sensor network. Generally, such a dynamic tracking problem should employ a prediction-update type algorithm to track the target, e.g., Kalman filter. For our formulation, we need to fuse the prior information into the EFIM formulation and execute our algorithm. In this case, the prior information will help us improve the localization performance. Then, the EFIM should not only consider the ranging measurement but also the prior information, which is and is the prior information. For such sequential estimations, the power allocation schemes still only allocate the power based on , and the actual estimation performance should be calculated based on . For the third scenario, the target moves faster than the signal acquisition. In this case, the proposed algorithms highly rely on the prediction function, and the power allocation schemes should be a pre-determined algorithm that is used for the future time slots. However, the applications in our paper are only used for human or network nodes. Such high speed will not happen in our paper. Then, the sequential evaluation is depicted in Figure 6. In this simulation, we employ HA to evaluate the SPEB. Since the power consumption is mainly based on , it is almost stable if other parameters are not changed. Additionally, the estimation accuracy is improved gradually with the help of prior information.
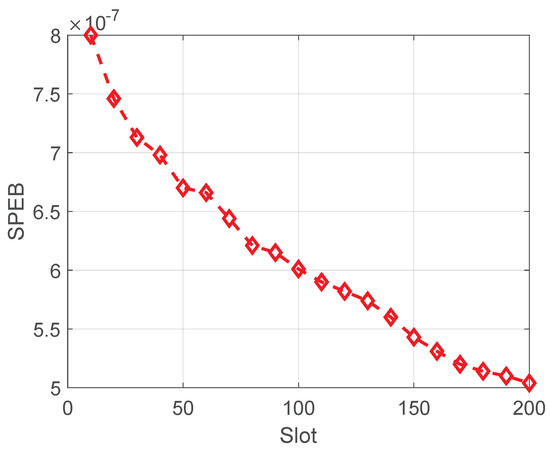
Figure 6.
Sequential estimation.
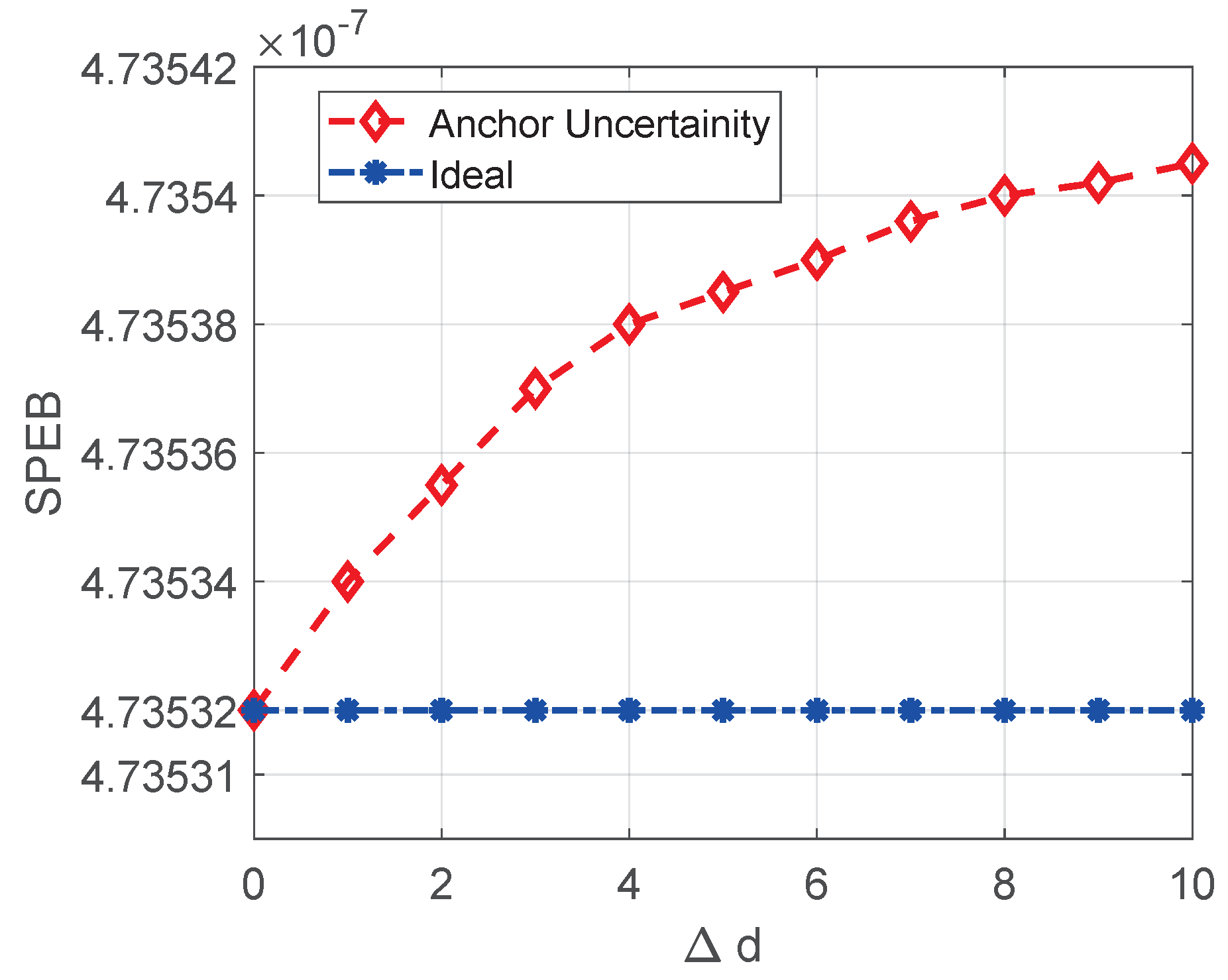
Lastly, we evaluate the anchor uncertainty and related robust algorithms. The SPEB results are illustrated in Figure 7, in which we adapt the range error caused by anchor uncertainty from 0 to 10 m. Additionally, we compare the SPEB with perfect anchor position information. However, the increased SPEB is rather small as indicated in Figure 7. Such estimation error with anchor uncertainty is quite close to the ideal anchor information, which means our robust formulations and solutions are effective.
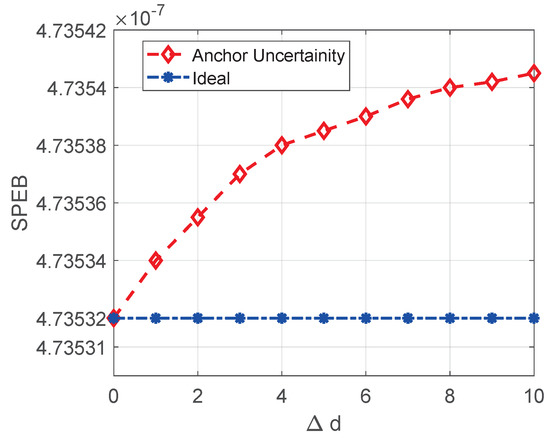
Figure 7.
Anchor uncertainty evaluation.
7. Conclusions
In this paper, we propose a WEHLoc which employs passive sensors to harvest energy and track the target. The lifetime of the range-based wireless localization system is significantly extended with a continuous wireless power supply. The EFIM of the system is formulated and we propose a multi-objective optimization algorithm as the energy beamforming scheme to achieve both the minimum SPEB and energy consumption. To reduce the high computational overhead in the massive deployed anchor scenario, we also propose a heuristic algorithm. The multi-target tracking and anchor uncertainty problems are also discussed. Then, the robust problem formulation and solutions are also developed. The simulation results demonstrate that the system estimation accuracy and energy efficiency heavily depend on the target transmitted power, area of the playing field, and number of deployed anchors. The results also demonstrate that our heuristic algorithm can approach the optimal performances in any scenario with relatively low power consumption.
Note that our work provides the fundamental limits of localization performance for WEHLoc, which will benefit the system design and control. Such SPEB evaluations are easily proven in the simulations and real experimental data can not indicate the fundamental limits directly. Although several off-the-shelf chips containing the energy harvesting, sensing, and communicating functions are being developed, e.g., Powercast products, constructing such sensors in a network is still a work in progress. So it is still difficult to attain the real experimental data. In a future work, we will focus on circuit design and network construction to provide a real platform for location-based services.
Author Contributions
Conceptualization of WEHLoc, S.C. and Y.Z.; CRLB analysis and methodology, S.C. and D.L.; algorithm design, Y.Z.; simulations, D.L. and Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the National Nature Science Foundation of China (No. 61801306), Shenzhen Fundamental Research (No. JCYJ20180302145755311), Guangdong Special Fund for Science and Technology Development (No. 2019A050503001), and the Open Research Fund of State Key Laboratory of Space-Ground Integrated Information Technology under grant NO. 2018_SGIIT_KFJJ_ST_01.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. EFIM Derivation
According to [29], the EFIM should have the following form:
where is the equivalent ranging coefficient (ERC), which is expressed as:
Considering whether the anchor is powered up, we use or 1 as the coefficient. Then, we have (7).
Appendix B. Proof of Lemma 1
Here, we define , and . Let and be the eigenvalues of , then can be decomposed as:
where is a rotation matrix with angle in the LOS case, given by:
Then, . Consider due to the feature of EFIM, we attain the following formulation [32]:
where , and the equal mark = holds if and only if . Thus, we obtain a relaxed bound for which is monotonically nonincreasing convex function of . In this case, achieving the minimum SPEB is equivalent to attaining the maximum . Considering is a linear function of , is a linear programming if is fixed.
References
- Gu, Y.; Ren, F. Energy-Efficient Indoor Localization of Smart Hand-Held Devices Using Bluetooth. IEEE Access 2015, 3, 1450–1461. [Google Scholar] [CrossRef]
- Lohan, E.S.; Koivisto, M.; Galinina, O.; Andreev, S.; Tolli, A.; Destino, G.; Costa, M.; Leppanen, K.; Koucheryavy, Y.; Valkama, M. Benefits of Positioning-Aided Communication Technology in High-Frequency Industrial IoT. IEEE Commun. Mag. 2018, 56, 142–148. [Google Scholar] [CrossRef]
- Zheng, K.; Wang, H.; Li, H.; Xiang, W.; Lei, L.; Qiao, J.; Shen, X.S. Energy-Efficient Localization and Tracking of Mobile Devices in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2017, 66, 2714–2726. [Google Scholar] [CrossRef] [Green Version]
- Masazade, E.; Niu, R.; Varshney, P.K.; Keskinoz, M. Energy Aware Iterative Source Localization for Wireless Sensor Networks. IEEE Trans. Signal Process. 2010, 58, 4824–4835. [Google Scholar] [CrossRef]
- Hu, J.; Yang, K.; Wen, G.; Hanzo, L. Integrated Data and Energy Communication Network: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2018, 20, 3169–3219. [Google Scholar] [CrossRef] [Green Version]
- Zhai, D.; Zhang, R.; Du, J.; Ding, Z.; Yu, F.R. Simultaneous Wireless Information and Power Transfer at 5G New Frequencies: Channel Measurement and Network Design. IEEE J. Sel. Areas Commun. 2019, 37, 171–186. [Google Scholar] [CrossRef]
- Ponnimbaduge Perera, T.D.; Jayakody, D.N.K.; Sharma, S.K.; Chatzinotas, S.; Li, J. Simultaneous Wireless Information and Power Transfer (SWIPT): Recent Advances and Future Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 264–302. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.; Ho, C.K.; Guan, Y.L. Multi-antenna Wireless Energy Transfer for Backscatter Communication Systems. IEEE J. Sel. Areas Commun. 2015, 33, 2974–2987. [Google Scholar] [CrossRef] [Green Version]
- Gong, S.; Huang, X.; Xu, J.; Liu, W.; Wang, P.; Niyato, D. Backscatter Relay Communications Powered by Wireless Energy Beamforming. IEEE Trans. Commun. 2018, 66, 3187–3200. [Google Scholar] [CrossRef]
- Liu, M.; Liu, Y. Power Allocation for Secure SWIPT Systems With Wireless-Powered Cooperative Jamming. IEEE Commun. Lett. 2017, 21, 1353–1356. [Google Scholar] [CrossRef] [Green Version]
- Arnitz, D.; Reynolds, M.S. Multitransmitter Wireless Power Transfer Optimization for Backscatter RFID Transponders. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 849–852. [Google Scholar] [CrossRef]
- Wang, L.; Hu, F.; Ling, Z.; Wang, B. Wireless Information and Power Transfer to Maximize Information Throughput in WBAN. IEEE Internet Things J. 2017, 4, 1663–1670. [Google Scholar] [CrossRef]
- Liu, G.; Sun, Z.; Jiang, T. Joint Time and Energy Allocation for QoS-Aware Throughput Maximization in MIMO-Based Wireless Powered Underground Sensor Networks. IEEE Trans. Commun. 2019, 67, 1400–1412. [Google Scholar] [CrossRef]
- Na, K.; Jang, H.; Oruganti, S.K.; Bien, F. An improved wireless power transfer system with adaptive technique for Implantable Biomedical Devices. In Proceedings of the 2013 IEEE MTT-S International Microwave Workshop Series on RF and Wireless Technologies for Biomedical and Healthcare Applications (IMWS-BIO), Singapore, 9–11 December 2013; pp. 1–3. [Google Scholar]
- Zhu, G.; Mai, S.; Tang, X.; Wang, Z. Enhancement Method of Efficiency and Working Range in Bio-Implant Wireless Power Transfer. In Proceedings of the 2018 IEEE Wireless Power Transfer Conference (WPTC), Montreal, QC, Canada, 3–7 June 2018; pp. 1–4. [Google Scholar]
- Naderiparizi, S.; Kapetanovic, Z.; Smith, J.R. RF-powered, backscatter-based cameras. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 346–349. [Google Scholar]
- Bo, H.; Nielsen, R.; Papadias, C.; Prasad, R. Radio frequency energy harvesting for long lifetime wireless sensor networks. In Proceedings of the International Symposium on Wireless Personal Multimedia Communications, Atlantic City, NJ, USA, 24–27 June 2014. [Google Scholar]
- Li, W.W.; Shen, Y.; Zhang, Y.J.; Win, M.Z. Robust Power Allocation for Energy-Efficient Location-Aware Networks. IEEE/ACM Trans. Netw. 2013, 21, 1918–1930. [Google Scholar] [CrossRef] [Green Version]
- Ju, H.; Zhang, R. Throughput Maximization in Wireless Powered Communication Networks. IEEE Trans. Wirel. Commun. 2014, 13, 418–428. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, M.; Youssef, M. CellSense: An Accurate Energy-Efficient GSM Positioning System. IEEE Trans. Veh. Technol. 2012, 61, 286–296. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Yin, J.; Zhang, S.; Ding, B.; Guo, S.; Wang, K. Range-Based Localization for Sparse 3-D Sensor Networks. IEEE Internet Things J. 2019, 6, 753–764. [Google Scholar] [CrossRef]
- Mao, C.; Lin, K.; Yu, T.; Shen, Y. A Probabilistic Learning Approach to UWB Ranging Error Mitigation. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Garcia, N.; Wymeersch, H.; Larsson, E.G.; Haimovich, A.M.; Coulon, M. Direct Localization for Massive MIMO. IEEE Trans. Signal Process. 2017, 65, 2475–2487. [Google Scholar] [CrossRef] [Green Version]
- Vauche, R.; Bergeret, E.; Gaubert, J.; Bourdel, S.; Fourquin, O.; Dehaese, N. A remotely UHF powered UWB transmitter for high precision localization of RFID tag. In Proceedings of the 2011 IEEE International Conference on Ultra-Wideband (ICUWB), Bologna, Italy, 14–16 September 2011; pp. 494–498. [Google Scholar]
- Pannuto, P.; Kempke, B.; Dutta, P. Slocalization: Sub-uW Ultra Wideband Backscatter Localization. In Proceedings of the 2018 17th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Porto, Portugal, 11–13 April 2018; pp. 242–253. [Google Scholar]
- Fantuzzi, M.; Masotti, D.; Costanzo, A. Rectenna Array with RF-Uncoupled Closely-spaced Monopoles for Autonomous Localization. In Proceedings of the 2018 48th European Microwave Conference (EuMC), Madrid, Spain, 23–27 September 2018; pp. 765–768. [Google Scholar]
- Dai, W.; Shen, Y.; Win, M.Z. Distributed Power Allocation for Cooperative Wireless Network Localization. IEEE J. Sel. Areas Commun. 2015, 33, 28–40. [Google Scholar] [CrossRef]
- Shen, Y.; Dai, W.; Win, M.Z. Power Optimization for Network Localization. IEEE/ACM Trans. Netw. 2014, 22, 1337–1350. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Win, M.Z. Fundamental Limits of Wideband Localization Part I: A General Framework. IEEE Trans. Inf. Theory 2010, 56, 4956–4980. [Google Scholar] [CrossRef]
- Qi, Y.; Kobayashi, H.; Suda, H. Analysis of wireless geolocation in a non-line-of-sight environment. IEEE Trans. Wirel. Commun. 2006, 5, 672–681. [Google Scholar] [CrossRef]
- Wolsy, L.A. John Integer Programming Wiley & Sons Inc.: New York, NY, USA, 1998; Volume 20, pp. 116–134. [Google Scholar]
- Rabinowitz, L. Mathematical Statistics and Data Analysis. Technometrics 1989, 31, 390–391. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).