1. Introduction
The Internet of Robotic Things (IoRT) is an emerging computing paradigm for robotic systems in factories, which is expected to revolutionize the whole manufacturing industry [
1,
2]. In particular, the IoRT adopts the advanced computing capabilities and features of the fog and cloud computing paradigms, such as (i) virtualization technologies, (ii) layered services, and (iii) the agile provisioning capabilities of local/remote computing resources, while integrating into the Internet of Things (IoT) infrastructure associated with its enabling technologies (e.g., sensors and actuators embedded in smart devices) to make the design and implementation of new applications more flexible for the robotic manufacturing systems [
3]. The IoRT is also considered as the evolution of cloud robotics [
4], by integrating the IoT to leverage and expand the use of robots in industry. Indeed, big tech enterprises have poured huge investments into the technological revolution of both robotics and the IoT. According to Gartner’s report, 20 billion devices would be affected by the IoT by 2020, and the IoT business would reach USD 300 billion. The IoT is considered one of the top five trends in recent years [
5].
1.1. IoRT Performance Evaluation
However, one of the challenges of the IoRT is to allow the offloading of computationally intensive tasks from IoT devices embedded in robots to the outer fog/cloud systems. In turn, the decision about offloading requires a rigorous and unified architecture that can handle complex issues. In particular, a single robot can comprise hundreds of sensors and actuators. The robots require a high degree of communication and processing to perform or even simulate tasks. Meanwhile, real-time constraints are often required to complete the tasks in these scenarios. For the betterment of the performance in operations and management, the IoRT systems should perform different tasks, considering the limitation of available computing resources and the predictability of congestion or failures. Given that these resources are distributed across individual robots or the robots that collaborate in a network, from geographically local or distant data centers, i.e., the fog and cloud, it is apparently a challenging problem to (i) allocate adequate resources and (ii) configure the capacity of specific resources to perform tasks with a desired mean response time. Therefore, there is a critical need to develop a performance evaluation methodology and models to assimilate the performance and impact of system components/parameters on the performance of such intense and busy data transactions in IoRT infrastructures for autonomous factories.
1.2. Literature Review
Previous studies have contributed great progress to the introduction and adoption of the IoRT along with its computing infrastructures in various applications, which indicates the potentials of IoRT infrastructures in Industry 4.0. Andò et al. presented the first attempt at pattern authoring in the IoRT context, specifically for ambient assisted living scenarios in [
6]. The authors pointed out the significance of adopting the cloud-based IoT framework for robotic systems and, thus, the necessity of identifying and defining patterns due to the presence of humans along with their interactions with robots. Reference [
7] demonstrated the use of IoT devices to help control a YuMi® robot and collect sensor data through a TCP/IP connection. The work presented a practical example of the IoRT in which a robot can be controlled and all IoT devices and sensors can be accessed to collect data through an Internet connection. On the other hand, Reference [
8] proposed an IoT-aided robotics platform equipped with an augmented online approach that helps identify kidnapping events in an indoor mobile robotic operation. The works [
2,
9] presented comprehensive reviews on the recent developments and adoption trends of the IoRT in various smart and critical domains such as in the Internet of Medical Things (IoMT), manufacturing, surveillance, and so on, in which the integration of the IoT and robotic agents is the backbone for the development of new-generation devices in Industry 4.0. In particular, in the work [
10], Ghazal et al. proposed an edge/fog/cloud architecture for the detection of thermal anomalies in aluminum factories, in which mobile IoT edge nodes were carried on autonomous robots, companion drones were involved as fog nodes, and a cloud backend was used for advanced artificial-intelligence-based analyses of thermal anomalies. The previous studies signify the need for the integration of the cloud/fog/edge IoT architecture and robotic systems to harmonize and strengthen the operations and data communication among robot agents in a complete robotic infrastructure to bring about a high level of productivity and applicability in both industrial and academic domains. Although many works demonstrated different applications of the IoRT in practice, few previous studies in the literature have addressed the challenging problems related to performance and the impact of system components/parameters on the performance indices of the cloud/fog/edge computing backbone in IoRT infrastructures. A reference multilayer architectural model for the IoRT was proposed in [
3] and analyzed in [
11]. Models for the perception and control of robots in physical space and their applications were proposed in [
12,
13,
14,
15]. However, few studies explored the adoption of queuing networks for IoRT modeling and planning. Queuing models have been applied to the IoRT successfully for memory management accessed by sensors and actuators [
16] and delivery services operated by robots [
17]. However, such models based on queuing theory nor the models above considered the IoRT computing architecture as a whole. In other words, existing works do not address congestion management between layers and load balancing issues.
1.3. Our Approach
In this work, we propose a queuing network model to assimilate the performance of a computing infrastructure for the IoRT. Queue models offer a theoretical and experimental framework for performance analysis and planning of computer systems [
18]. The proposed model considers the processing and transmission of data generated by robots in a multilayer computing architecture. This model enables exploring the impact of architectural configuration alteration, considering the computing capacity of the layers: edge, fog, or cloud. Simulations were performed with two classic load balancing algorithms including round-robin (even distribution) and weighted round-robin strategies for the multilayer IoRT computing infrastructure. Critical performance metrics related to the quality of service were evaluated, specifically the (i) mean response time, (ii) utilization of computing layers, (iii) number of messages, and (iv) rate of dropped tasks. This study extends current progress in previous works by performing a comprehensive sensitivity analysis based on the Design of Experiments (DoE) to find the factors that expose the highest impact on the system performance, then adopting the obtained values of these factors in the performance model in different practical scenarios for performance evaluation. From the knowledge of the impact factors discovered in the DoE, we evaluated the performance impact of different load balancing algorithms and the variation in the capacity of several system components and parameters.
1.4. Contributions
To the best of our knowledge, this work presents an extension of the current progress in the performance evaluation of IoRT infrastructure by the following key contributions:
The proposed performance evaluation methodology and model based on queuing theory, which allow IoRT system designers to analyze the impact of architecture component configurations on the performance of a system before its implementation. The model is highly capable of being adjusted by the alteration of different system parameters such as transmission time, service time, queue size, resource capacity, and routing strategies;
The performed sensitivity analyses adopting the DoE to empirically identify the most impactful factors on system performance regarding various system components in different computing layers of the IoRT infrastructure under consideration;
The conducted comprehensive performance evaluation to assimilate the most critical factors to enhance the system performance, such as load balancing algorithms, along with different computing cores per node.
1.5. Research Remarks
The following findings were obtained through the analysis results:
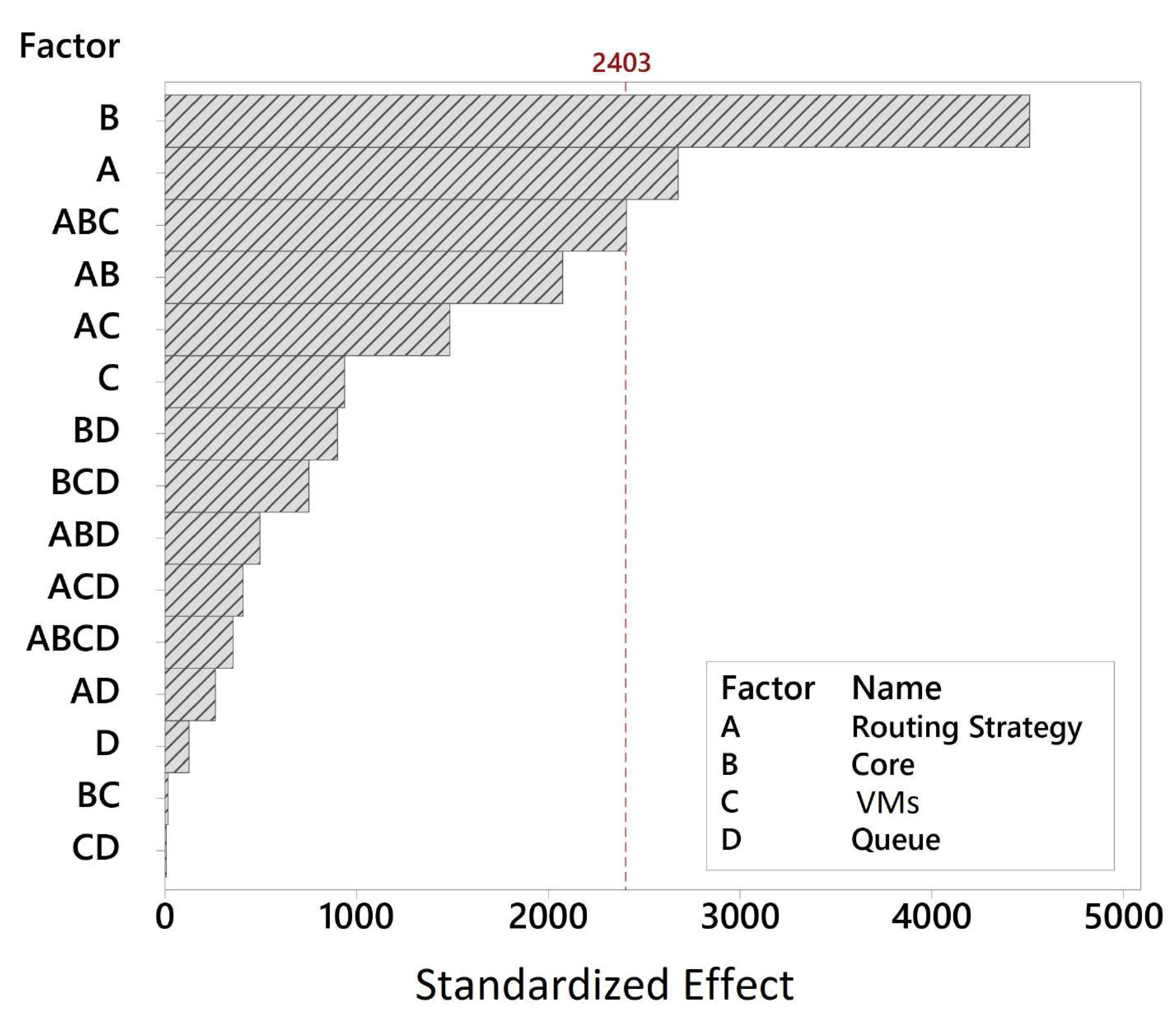
The number of computing cores of VMs in fog nodes is exposed as the most decisive factor for the system efficiency of the IoRT infrastructure adopting edge/fog/cloud computing continuum. This means that the processing power of the machines in the fog/cloud computing layers is a critical factor to enhance the overall system performance of the IoRT computing infrastructure under consideration;
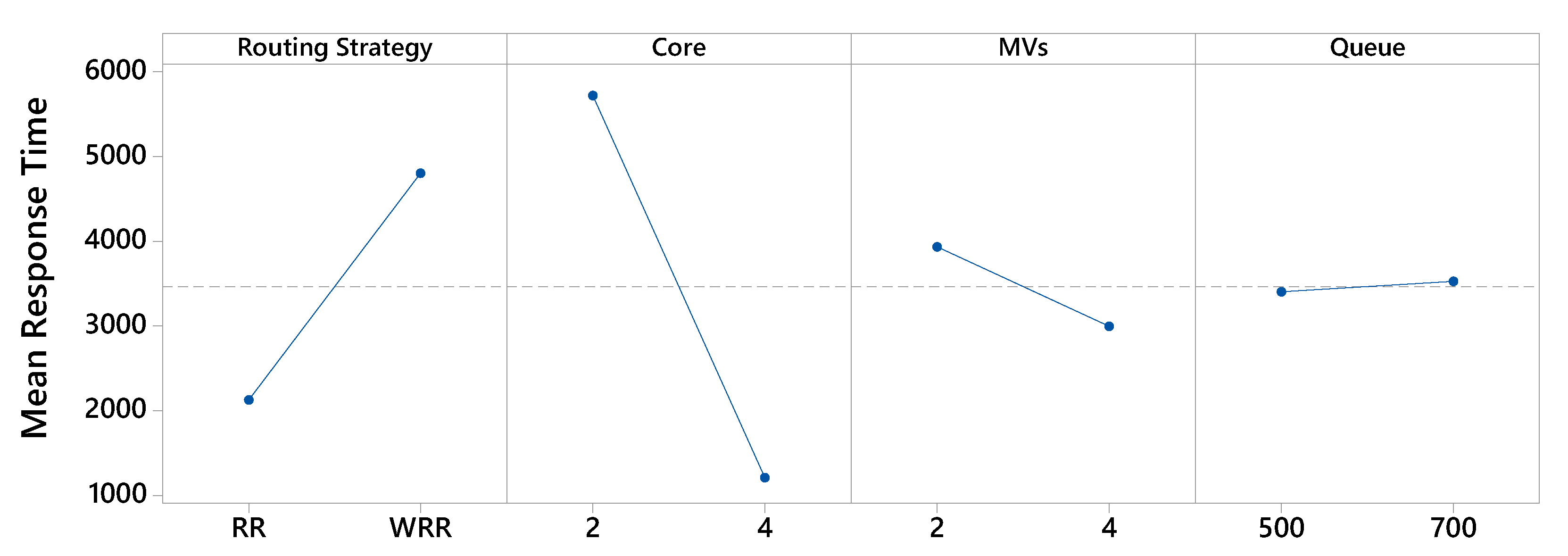
The weights for message routing and the distribution to each computing layer in the weighted round-robin strategies should be designed under the awareness of the specific processing capacity of virtual machines in the corresponding computing layer. Therefore, the computing in the IoRT infrastructure is more efficient with weighted round-robin strategies than using the simple round-robin strategy. Furthermore, the greater number of computing cores can drastically reduce the MRT compared to the smaller one. However, a higher weight with a low capacity selected for a specific computing layer can lead to significant package losses of messages;
When comparing the results by the computing layers in the three specific scenarios, it was observed that the fog had the lowest MRT, which as smaller than the private cloud, which in turn had a lower MRT than the public cloud. Therefore, it is important to note that the weights of load balancing strategies among computing layers expose a major impact on the MRT of the overall IoRT infrastructure. This result greatly influences the allocation processes of the fog/private cloud/public cloud computing resources to satisfy the required latency levels;
Our analysis pointed out that a higher processing power should be assigned to the fog computing layer whenever the data traffic increases (i.e., shorter arrival time) to this layer, which could be the culprit of resource shortages due to utilization overload;
The obtained results can be a practical guide for performance analysis using the proposed model in a practical application of the IoRT.
1.6. Paper Organization
The remaining sections of this paper are organized as follows. In
Section 2, the related works are discussed. The IoRT architecture for this paper is presented in
Section 4. We describe the proposed queue model for the processing and communication analysis in
Section 5. In
Section 6, the sensitivity analysis of the IoRT components that most impact the system is performed, while the performance analysis of these factors using the proposed queue model and the discussion of their results are presented in
Section 7. The conclusions are given in
Section 8.
2. Related Work
In this section, research works related to architectural modeling and infrastructure planning for the IoRT are presented. Starting with seminal articles in this area, the definition of the IoRT and its architectural principles was proposed in [
3] as a multilayer architecture. This architecture focused on the communication components with the robot sensors and the Internet layer connecting robots to the fog and cloud. Subsequently, in [
11], a similar architecture was analyzed with a focus on the optimization and security of the communication protocols. In turn, in [
2], the authors identified the main application domains for the IoRT and pointed out the applications that should support Industry 4.0 cyberspace. Motivated by the above works, this study focuses on performance a modeling evaluation of IoRT computing infrastructures.
Models for perception and control of robots and their applications have been widely studied in the IoRT. Most of the efforts in this line [
12,
13,
14,
15] deal with mapping robot movement in physical space based on Petri Net (PN) models. In [
12], a framework for the automatic generation of robots’ coordinated mission based on PN was proposed in conjunction with an experimentation platform, while in [
13], the PN was used to model and improve the navigation of multiple robots in a competition simulating a soccer match. A PN model for automatic robot travel planning based on movement identification via Radio Frequency (RFID) was proposed in [
14]. In the same line of research, in [
15], the use of RFID for positioning and teaching robots in the mapping of environments based on PN was evaluated.
Even earlier than the proposal of IoRT concepts, cloud infrastructures were already used in robotics to extend robots’ skills for the sake of the interaction between humans and robots associated with the respective environmental sensing, which is well known as cloud robotics. In [
19], a service based on a robot named Kubo was proposed to offer elderly assistance for independent living, in which the robotic computing and services rely on cloud resources to extend the robot’s capabilities for human interaction. The robot’s main tasks were based on speech recognition and knowledge retrieved from a knowledge database in a distant cloud for the robot’s perception of the surrounding context and environment. However, real-time constraints were not considered for the robot tasks due to performance issues. A framework targeting data retrieval from a cloud for multiple robots to perform near-real-time tasks was investigated in [
20]. In this work, the authors granted robots asynchronous access to the cloud using market-based management strategies modeled as a Stackelberg game. The above works dealt with the problem of sharing resources in the cloud efficiently for multiple robots. Nevertheless, these works did not explore promising architectures to satisfy real-time constraints in the consideration of the simultaneous consumption of computing resources for real-time robot tasks.
Multilayer architectures that leverage communication in even more complex robot systems spreading over wide sensing environments are the challenges in IoRT research and development. In [
1], different approaches based on graph models were proposed to efficiently maintain connectivity among various mobile robots for a desired Quality of Service (QoS) level. The authors evaluated their approaches considering the compromise between communication coverage and QoS in communication. In [
21], a Human Support Robot (HSR) service based on the IoRT was proposed to monitor the behavioral disorders of patients with dementia in which the assisted patients interacted with the fellow robots. The HSR service explored the use of various components in the various computing layers of the IoRT architecture from actions and data collection via sensors and wearable devices to anomaly detection tasks coupled with cloud processing. A multilayer architecture for robotic telesurgery was proposed in [
22]. The authors employed cloud and fog tiers managed by software-defined network controllers to provide real-time telesurgery services. The work also presented a queuing model to evaluate the performance of the telesurgery system architecture with a focus on the metrics of deadline hit ratios in telesurgery services.
Finally, queuing models offer a theoretical and experimental framework for the performance analysis and planning of computer systems [
18]. In [
16], a queuing model was proposed to analyze the efficiency of robotic systems in the collection of data in sensors and the response via actuators. This model helped designers avoid data loss in sensors, which is a typical IoRT problem. Similarly, a queuing model for the performance analysis of inventory services and the delivery of materials controlled by robots was proposed in [
17]. The authors considered several autonomously guided vehicles receiving requisitions, collecting materials on shelves, and then, delivering them to a central collector. Robot jams occurred at the central collector, and an M/G/1 queue model was used to estimate the average requisition time and service flow. In [
23], an M/M/s queuing model with impatient customers was adopted to estimate the part flow for a pick-and-place task with a multirobot system. The authors showed by simulation that their estimation approach improved the task completion rate of the system compared to estimations based on the Monte Carlo strategy and the M/M/1 queuing modeling method.
The above-mentioned works revealed the capability of adopting queue models for performance evaluation of IoRT infrastructures. However, in this literature review, none of the proposed queuing models considered dealing with the multilevel computing architecture of IoRT infrastructures as a whole. In
Table 1, we present a comparison of the previous works as discussed above to distinguish the contributions of this study.
The related works that used mostly IoRT-related subjects associated with analytical models were [
12,
13,
14,
15]. The more evaluation
metrics were used, the better the comprehension of the system’s behaviors was. This study considers even more performance metrics including the Mean Response Time (MRT), the utilization of computing layers, the waiting time in queues, and the discard rate. Analyzing the
resource capacity to support the generation of IoRT data is essential. Among the related works, only the works [
17,
25] performed different variations of resource capacity. On the other hand, the proposed model in this study is unique in representing several points of
load balancing aiming at the greater use of resources. The
sensors grouped by location criteria refers to how the proposed model represents different groups of sensors. The selected works in the literature employed only a single group of sensors, which therefore could only generate a single arrival rate, which was also not practical since there are often a huge number of robots and their associated sensors and actuators to generate heterogeneous data. On the contrast, the model proposed in this work allows assigning different arrival rates by location. This unique feature aims to reflect the practical operations because these sensors can have different critical levels depending on the location. The model in this work also has the exclusive feature of representing the
number of processing cores per machine. Both the fog and cloud are represented with multiple Virtual Machines (VMs) with multiple cores in each VM. The model enables varying the capacity of the number of machines and also enables computing the
average response times per layer. In this way, the calculated MRTs enable assimilating the impact of each part on the overall system performance. This study provides various extensions and advantages in comparison with previous works in the literature on the performance valuation of IoRT infrastructures.
3. Performance Evaluation Methodology
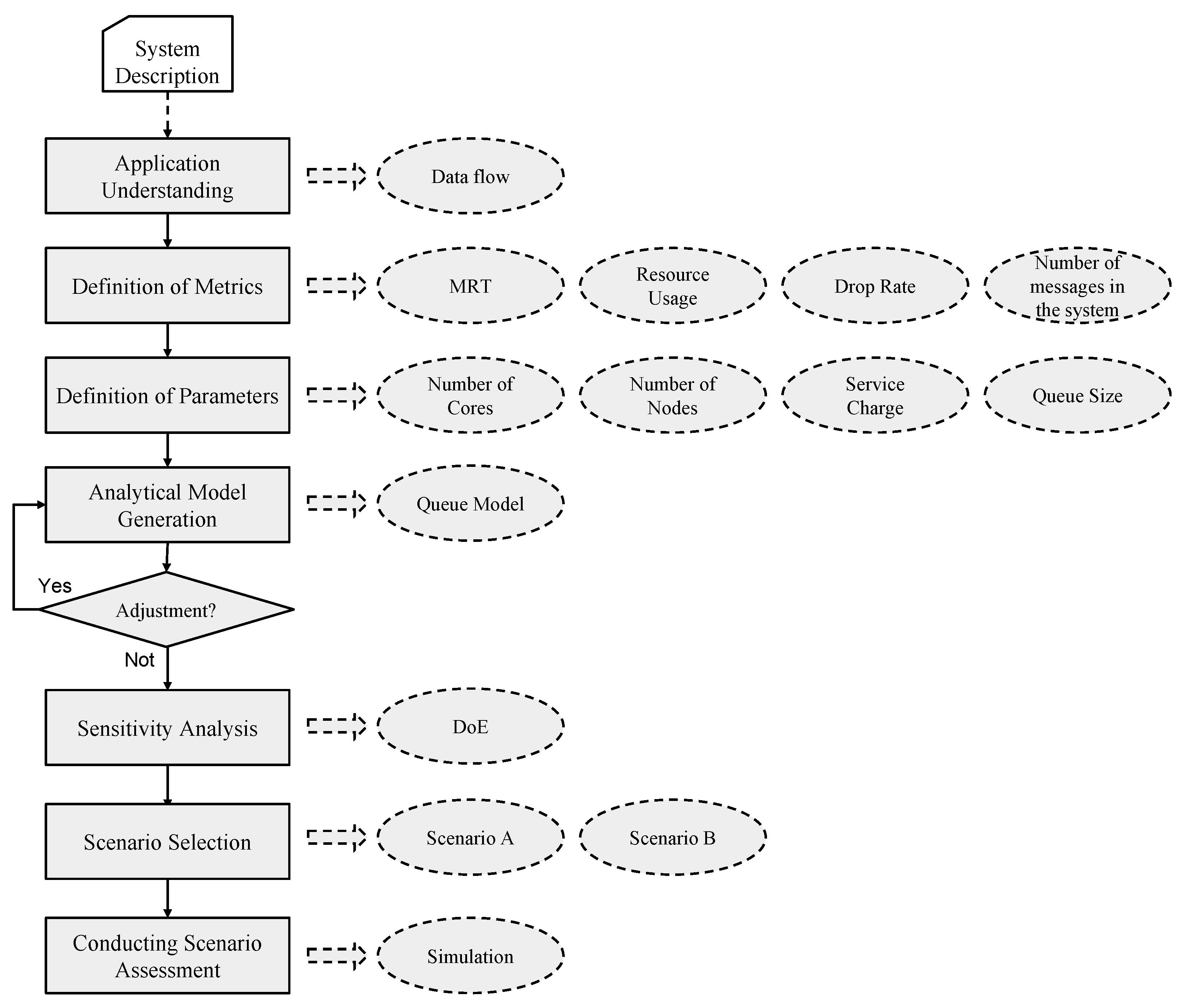
Figure 1 presents a flowchart that abstracts our methodology of the performance evaluation of IoRT infrastructures using the queuing-network-based performance model. The ultimate goal was to develop a queuing-network-based performance model that can assimilate IoRT system performance for robots performing tasks in manufacturing factories in which the computing is associated with the edge, fog, and cloud computing continuum. Furthermore, a number of different operational scenarios were considered to evaluate the proposed performance model. More importantly, the sensitivity analysis and performance evaluation were conducted to determine the most impactful metrics.
The first step of the methodology concerns the application understanding. It is important to comprehend how the application works, define how many components are involved, and the system’s data flow, for example, where the data are delivered after passing through a given component. The next step encompasses the metrics’ definition, in which various performance metrics of interest are identified considering the model’s knowledge to diagnose the system performance. In this work, we adopted important performance metrics for the end user’s perception and system administrators’ utility including the MRT, resource utilization, number of messages in the system, and message discard rate. The definition of parameters is the step where we set the model parameters regarding the behavior and capability of each component. These parameters were the number of cores, number of nodes, service rate, and queue size in this work. Thus, we conducted the analytical model generation based on queuing theory, considering the defined metrics and parameters and the expected results. The choice of the queuing model in this approach can satisfactorily abstract the complexity of the IoRT architecture so that system administrators and researchers can focus on the system’s most important components. In the template validation, the model validation was implemented using a programming language that considers different components of the system architecture. The results collected in the validation were compared with the results returned by the model. The model was validated if sufficient values were found similarly for both. Otherwise, the model parameters must be adjusted. If more adjustment was realized after the validation step, we needed to return to the analytical model generation step. We adopted the DoE to perform sensitivity analyses considering predefined factors and critical levels. The analyses can identify the most relevant factors for a given metric and how the interaction between the factors and variations in their levels impacts the system performance. Given the sensitivity analysis, some practical scenarios, i.e., the scenario selection step, were taken into consideration for the system performance analysis. In this way, the most important factors were analyzed with the proposed performance model. Finally, the selected scenarios were evaluated using the queuing model through numerical evaluation in the conducting the scenarios assessment step. In each scenario, we varied the most important factors, and the chosen metrics were analyzed, allowing us to observe the system configurations that expose a required satisfactory level of system performance.
4. The Internet of Robotic Things
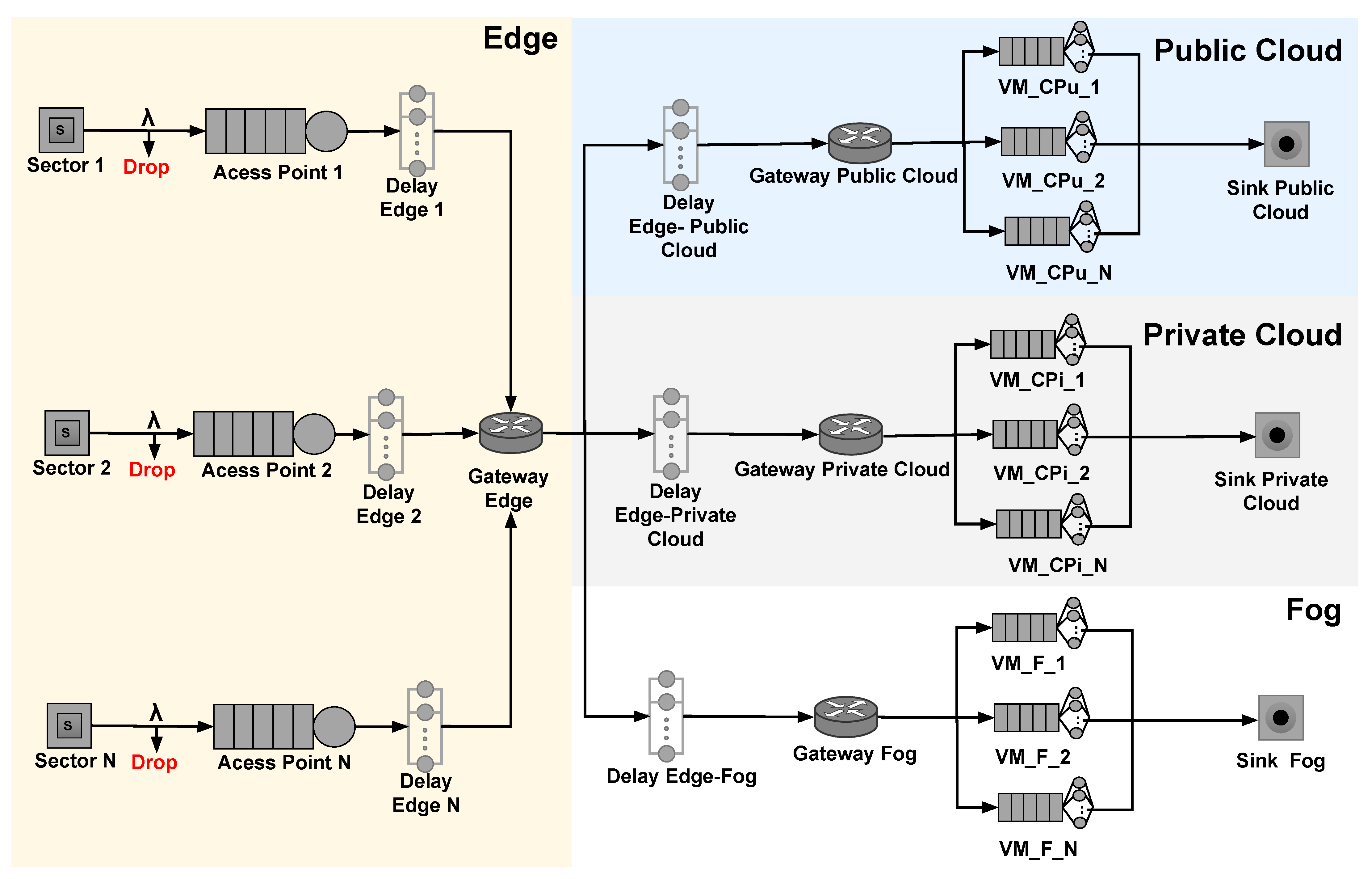
In this section, a typical IoRT system architecture is presented for the sake of performance the modeling and analysis, as shown in
Figure 2 [
3,
11]. The IoRT infrastructure is supposed to adopt a multilayer architecture that integrates (i) the
edge layer, the edge of the robotic network of robots and smart devices located in delimited workspaces or sectors (e.g., production lines or offices) in different places (e.g., factories or buildings, and (ii) the
fog and cloud computing layers for data processing and to provide supplementary computing storage. The
fog layer allocates processing power closer to the edge of the network to support local computing, and it is also a decentralized architecture in which the data and computing capabilities are distributed between the data source and a cloud. On the other hand, the
cloud layer can be further divided into (i) the
private cloud in which computing resources are for exclusive common use within a class of users or companies and (ii) the public cloud in which the computing resources are used by subscribed users who purchase their computing plans.
The purpose of this architecture is to process data streams originating from robot sensors or actuators in factories while performing tasks in various application domains [
2], such as those mentioned in
Section 2. In the
edge layer, robots with different sensors and actuators are connected via a wireless network through wireless
access points to perform tasks in individual or collaborative manners based on the tasks performed by the robots in the industrial production line. This layer is further composed of an edge
gateway for data aggregation and forwarding through a router to the fog or cloud computing layers in accordance with load balancing policies between the layers or the requirements of computing power. In turn, the fog or cloud layers are composed of (i) a number of computing nodes (i.e., virtual machines) for parallel processing of tasks regardless of their source and (ii) a
fog/cloud gateway for the aggregation and forwarding of computing jobs to the fog/cloud virtual machines based on the load balancing policy adopted in their respective tier.
Message lifecycle: The architecture in
Figure 2 also indicates the lifecycle of data packets and the accompanying operational processing behaviors for data streams generated by robots in industrial production lines. Fundamentally, when processing capabilities in the edge layer (i.e., in the robots themselves) are insufficient to process the edge data periodically generated in the edge layer, it is critical to forward the data processing jobs to the fog or cloud layers for more powerful processing capabilities. In such a sophisticated processing pattern of messages in the IoRT infrastructure, it is critical to assimilate (i) how the periodic interval variation for the data generated in the edge computing layer and (ii) how a specific configuration of each component of a layer impact the performance of the IoRT infrastructure evaluated via metrics such as the average time response and the throughput of tasks. In particular, data processing jobs are delivered over a wireless network to an edge device for the data to be encapsulated and aggregated. If the edge device is busy, data can be put in an edge queue, which will be served in order of arrival (first come, first served (FIFO) policy). However, if the edge device queue is completely occupied, the data will be discarded as a consequence. These alerts are then transmitted to the fog via a fog gateway. The edge/fog/cloud gateways play a role in the data distribution and load balancing for the public, private, and fog nodes. Load balancing is performed so that all fog and cloud nodes receive the same amount of processing requests, which is important to avoid overloading and queuing problems in one node while other nodes are idle, causing data congestion. Messages are processed in fog and cloud nodes. As with the edge device, fog and cloud nodes also have a queue capacity limit, and if that limit is reached, the data will be discarded as a consequence. To assimilate the impact of system parameters and components on the overall system performance, some research questions may arise in this study, including: (i) “
What is the impact of the request arrival rate on a system’s performance metrics?”; (ii) “
How does a specific resource capacity setting impact a system’s performance metrics? “.
Assumptions: To simplify the modeling, some assumptions about the architecture under consideration are provided as below:
[a1]: Data generation was modeled for all active robots in a room connected to an edge device that is also installed in the same room to cover the data transmission from the robots;
[a2]: The communication latency between sensors and high-end devices was not considered to simplify the queuing-network-based performance model. We assumed the establishment of noninterrupted wireless communication and high-quality data transactions between the robots and edge devices to minimize the negative impact of latency in the high-end short-haul communication on the overall performance metrics;
[a3]: The data collection of the robot was independent of each other. However, the arrival rate of the messages was assumed to be deterministic;
[a4]: Sophisticated load balancing strategies were not considered in the cloud/fog layers since the forwarding mechanisms can help reduce the overload of the cloud/fog layers. Thus, jobs arriving at the cloud/fog gateways are distributed evenly to each of the cloud/fog nodes;
[a5]: The message generation at the robots was supposed to statistically comply with a deterministic distribution, while the service of processing cores at the computing layers complied with an exponential distribution. Different distribution types of data arrival and processing time can also be adopted to reflect the practical arrival and processing of jobs at the edge/fog/cloud of the network.
5. Proposed Performance Model
Figure 3 illustrates a queuing-network-based performance model for the IoRT infrastructure under consideration. Java Modeling Tools (JMT) [
26] was used to model and evaluate the proposed scenarios. JMT is an open-source toolkit for simulating and evaluating the performance of communication systems based on queuing theory [
27].
The flow of data is illustrated from the left side to the right side of the model, which captures the data transmission throughout the IoRT from the sensors/actuators on each robot at the edge to the fog and cloud computing centers. Sensors generate requests within a predefined time interval following a particular probabilistic distribution (e.g., exponential distribution). The model has multiple entries corresponding to different groups of robots in individual manufacturing sectors at the edge of the IoRT infrastructure. Each sector has a number of robots all connected to a wireless access point in which the data generated by the robots following an exponential distribution are aggregated and received to forward to the upper layers for further processing and analysis. The access point can be, for example, a router, and the computing nodes can be processing cores. A queue and multiple computing nodes in the proposed model were used to represent each access point. The arrival rate depends on the number of robots and the distribution of the data generation from the robots’ sensors. Robot sectors are supposed to be placed at different areas of the same or different manufacturing factories. Each robot sector is located at different distances from the other layers; therefore, the delay to the computing layers needs to be taken into account (i.e., delays from the edge to the fog, public cloud, and private cloud computing layers). The delay components in the proposed model do not carry any specific service: it is just a component to represent the network delay in the transmission of a request.
The fog, public cloud, and private cloud were modeled in a similar manner. An input
gateway distributes data following a specific load balancing strategy. The cloud and fog layers have a service time related to their data processing tasks. It is noteworthy that the cloud layer has greater computing capacity than the fog layer. It was assumed that the arriving requests in each element of the overall system would be processed considering a First Come, First Served (FCFS) policy. By the Kendall notation [
28], a queuing network follows the pattern D/M/c/K/FCFS. The main parameters of the stations are the queue size, service time, and several internal servers (the computing layers considered as processing cores). The generation rate follows a deterministic pattern (
D) as the sensors were calibrated to a fixed generation interval. On the other hand, the service time (M) of a server often complies with exponential distributions, which usually feature continuous-time Markovian processes. Service stations have a number (
c) of servers. The last queues have a fixed size (
K) and adopt the FCFS service policy. Each access point can have a different arrival rate. Since they are often relatively infinitesimal values, we assumed neglecting the communication latency between sensors and access points. The
Delay components (e.g., “Delay Edge 1”,..., “Delay Edge N”) encapsulate any associated time from the exit of an access point to a gateway device. In this work, we assumed that the VMs are in charge of specific processing tasks. However, if an appraiser needs to represent such tasks as a storage delay, the appraiser must consider such respective times to feed the model. More layers of remote processing can be added to the model, but we chose to represent only the three most popular existing computing layers. A common difference between the public and private cloud relates to the level of data security and privacy. However, we assumed not to consider this requirement in the modeling.
8. Conclusions
In this paper, we proposed a performance model adopting a D/M/c/K/FCFS queuing network to assimilate the behaviors and performance of message transmission within an IoRT infrastructure that employed the edge/fog/cloud computing continuum. Different arrival rates in the model were used to capture the clustering and data generation of robots by groups at different places in practical manufacturing factories. The adoption of the proposed performance model helped measure and comprehend a variety of performance metrics of interest including the average response time, utilization, and drop rate, and the calculation of other performance metrics can be further extended. The proposed model elaborated some load balancing strategies for computing at different strategic locations (i.e., at the edge/fog/private cloud/public cloud gateways) in the whole computing system. DoE analyses were carried out to assess the most impactful factors on the overall system performance. A set of different configurations was given under the combination of the factors (i) load balancing algorithms, (ii) number of processing cores, (iii) number of processing nodes, and (iv) capacity of queues in different computing layers. In particular, among the considered system parameters, the processing capacity of the virtual machines was exposed to be the most impacting factor. Based on the output results of the DoE, a detailed performance evaluation was carried out to assess the impact of the variation of the computing servers’ processing capacity on the system performance in different scenarios. The performance evaluation was also conducted according to different routing strategies. Three different routing scenarios were evaluated adopting two popular routing algorithms, which were round-robin and weighted round-robin with different weights. The simulation results pointed out that a higher weight with a low capacity selected for a specific computing layer can lead to significant package losses of messages. Therefore, the weights for message routing and distribution to each computing layer in the weighted round-robin strategy should be designed under the awareness of the specific processing capacity of the virtual machines in the corresponding computing layer. Furthermore, through the analysis results, the research finding was that the processing capacity of the machines was exposed to be the most impactful factor on the overall system performance of the IoRT computing infrastructure. Simulation results highlighted the capability to adopt the proposed performance model to assimilate sophisticated behaviors in performance based on the variation of the configuration and the impacting factors of the IoRT infrastructure. The use of the proposed performance model enabled us to design system configurations to obtain the desired performance in a typical IoRT infrastructure.



 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}