
Robust Control Optimization Based on Actuator Fault and Sensor Fault Compensation for Mini Motion Package Electro-Hydraulic Actuator



Abstract
:1. Introduction
- (1)
- Concurrent fault/state estimation techniques robust to partially unknown inputs are developed under the support of the input-stable theory.
- (2)
- A combination of fault compensation for fault-tolerant control model and PID controller creates a robust fault estimation that makes tolerant strategies simple to apply and to improve the control performance under the impact of faults and external disturbances.
- (3)
- Input-to-state stability theory based on LMI optimization algorithm and augmented system is addressed by the tolerant closed-loop control system. The error dynamics reach the asymptotic stable state, which is shown as an effective tool for handling fault control issues.
- (4)
- The proposed method is compared to the PID controller to evaluate the effectiveness and performance of the proposed solution.
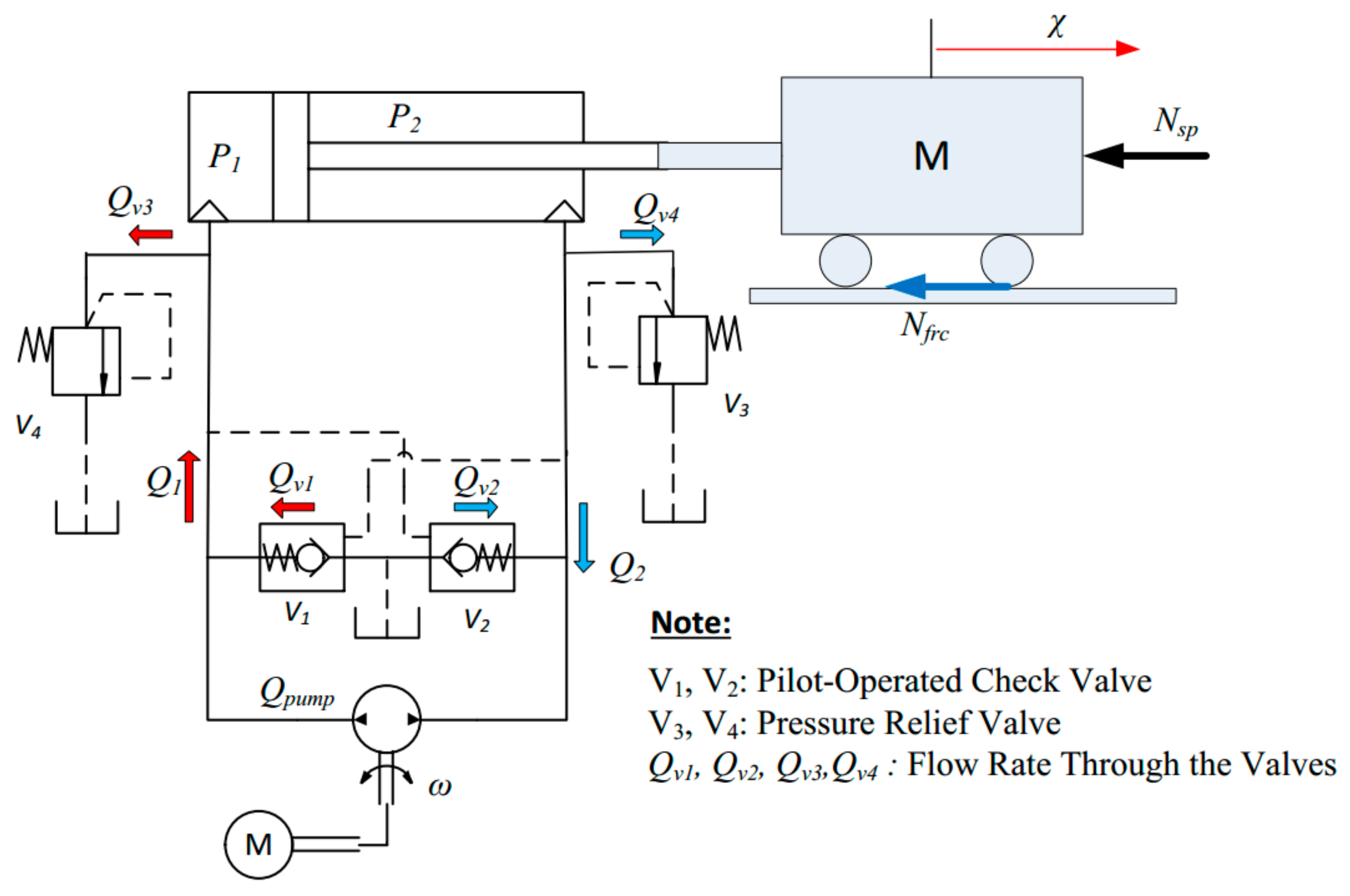
2. Modelling Mini Motion Package Electro-Hydraulics Actuator
3. Robust Actuator Fault Estimation for Nonlinear System
- if (13)is satisfied
- The matrix is stable if (11) is satisfied.
3.1. Sliding Mode Observer Design
3.2. Actuator Fault Estimation
4. Unknown Inputs Observer (UIO) for Non-Linear Disturbance
- (a)
- (b)
- , and is a full column rank
- (c)
- with
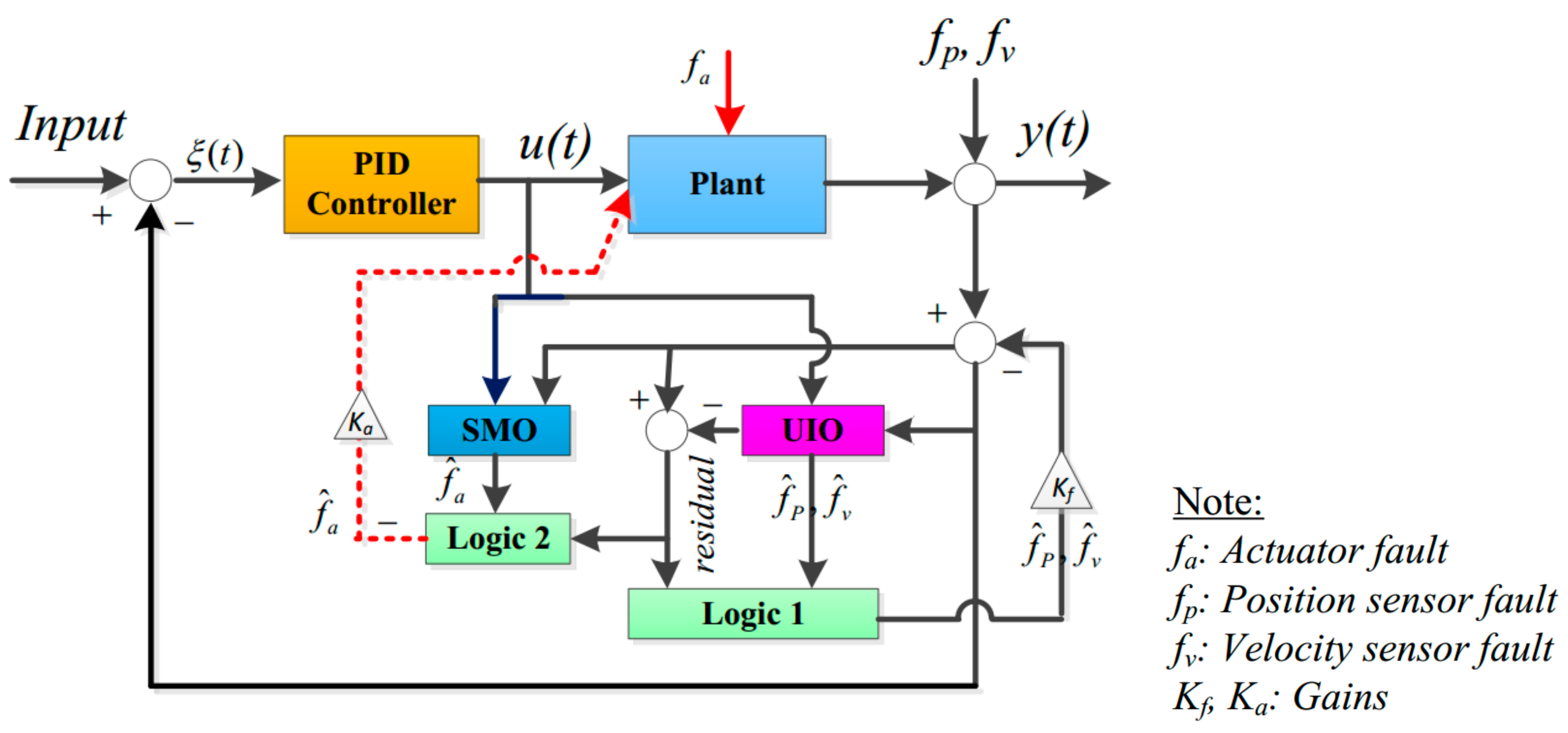
5. Actuator and Sensor Fault-Tolerant Control
5.1. Fault Tolerant Control Based General Residual and the Actuator and Sensor Fault Compensation
5.2. Actuator and Sensor Fault Compensation
5.3. Evaluating the Control Error Performance
6. Results
6.1. The Parameters of the MMP System
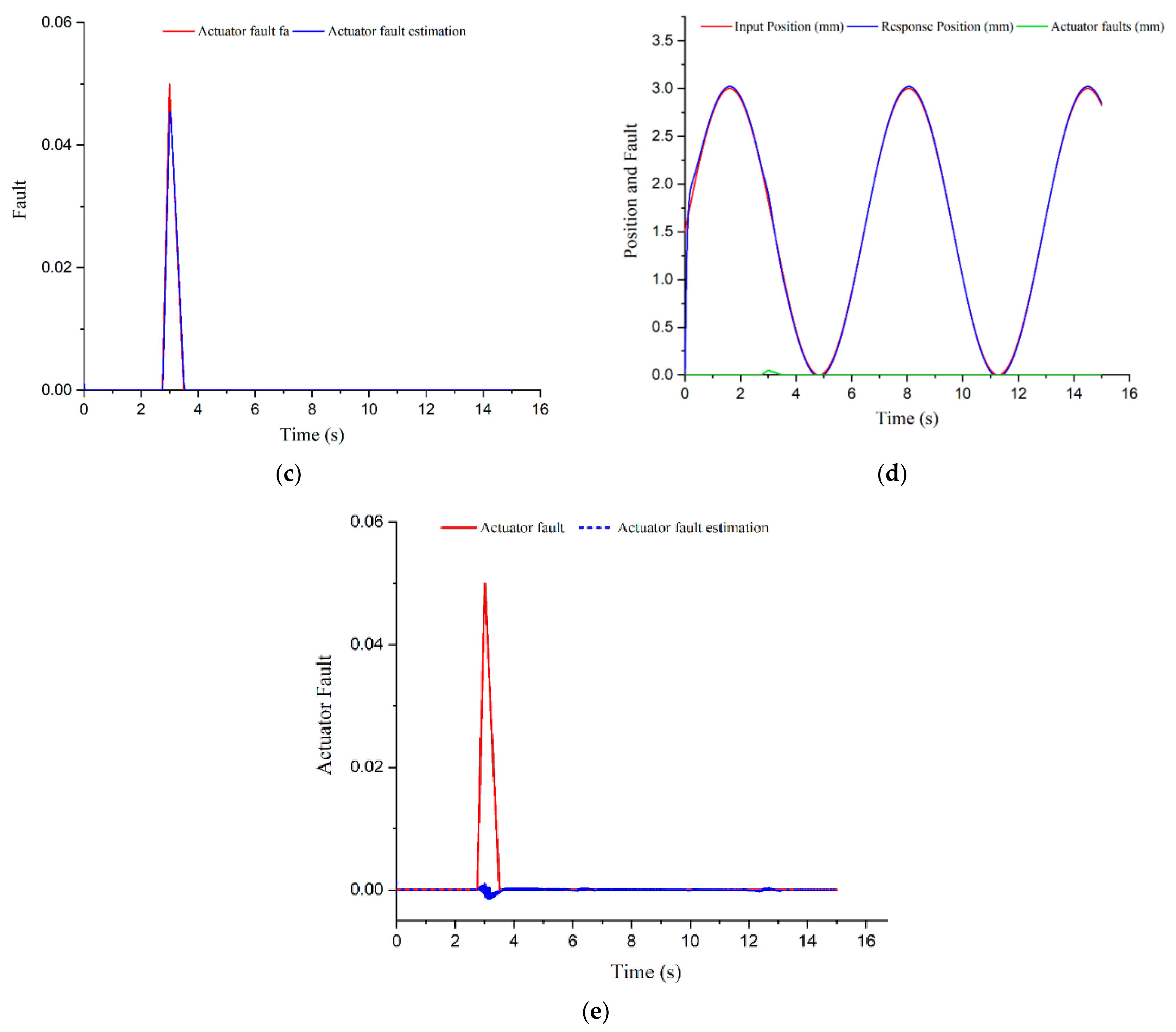
6.2. Actuator Fault
6.2.1. Actuator Fault Estimation
6.2.2. Simulation Results for Actuator Fault
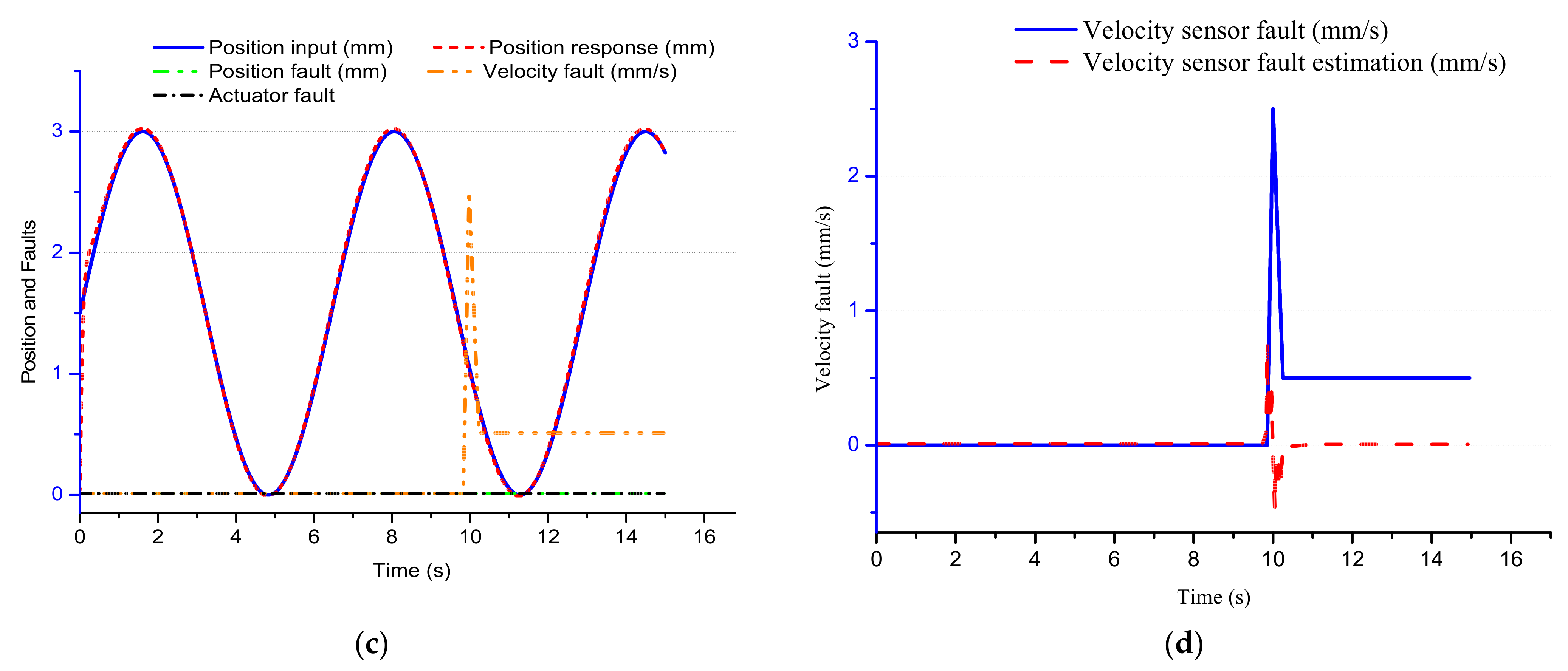
6.3. Sensor Fault
6.3.1. Sensor Fault Estimation
6.3.2. Simulation Results for Sensor Faults
- Position Fault
- Velocity Sensor Fault
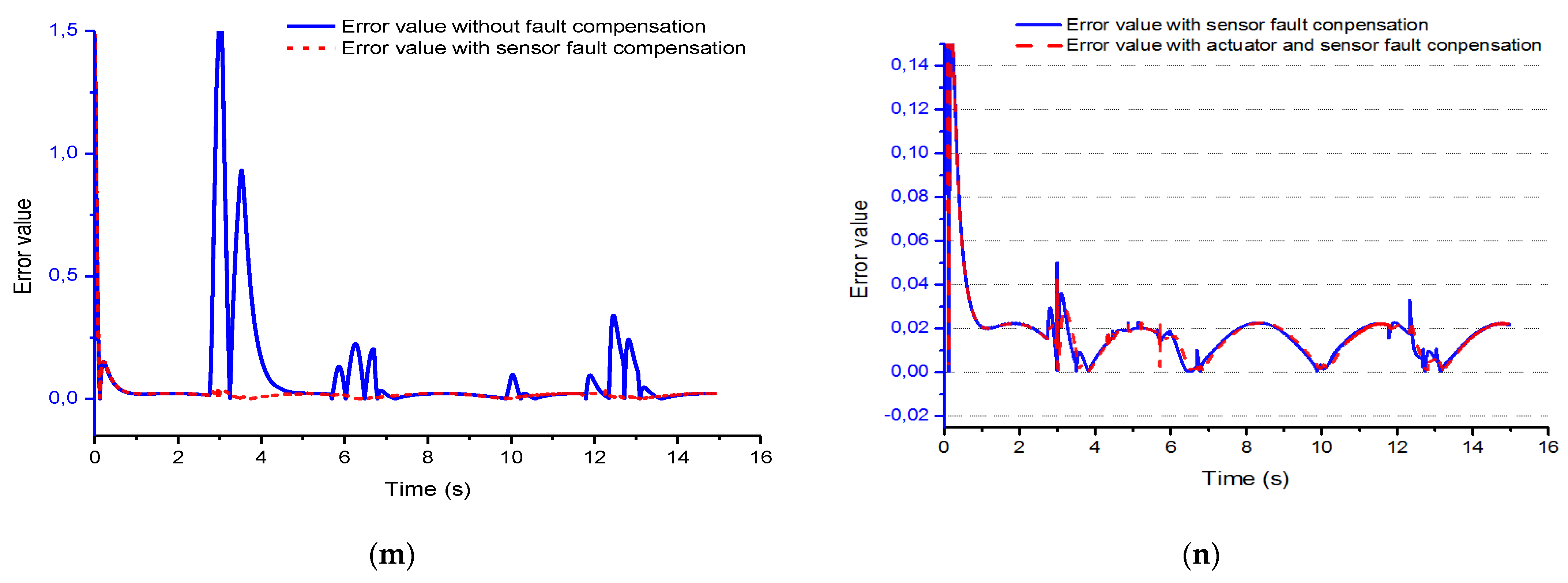
- Position sensor, velocity sensor, and actuator faults
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yao, J.; Yang, G.; Jiao, Z. High dynamic feedback linearization control of hydraulic actuators with backstepping. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2015, 229, 728–737. [Google Scholar] [CrossRef]
- Wonohadidjojo, D.M.; Kothapalli, G.; Hassan, M.Y. Position Control of Electro-hydraulic Actuator System Using Fuzzy Logic Controller Optimized by Particle Swarm Optimization. Int. J. Autom. Comput. 2013, 10, 181–193. [Google Scholar] [CrossRef] [Green Version]
- Feng, L.; Yan, H. Nonlinear Adaptive Robust Control of the Electro-Hydraulic Servo System. Appl. Sci. 2020, 10, 4494. [Google Scholar] [CrossRef]
- Huang, J.; An, H.; Yang, Y.; Wu, C.; Wei, Q.; Ma, H. Model Predictive Trajectory Tracking Control of Electro-Hydraulic Actuator in Legged Robot With Multi-Scale Online Estimator. IEEE Access 2020, 8, 95918–95933. [Google Scholar] [CrossRef]
- Skarpetis, M.G.; Koumboulis, F.N. Robust PID controller for electro—Hydraulic actuators. In Proceedings of the 2013 IEEE 18th Conference on Emerging Technologies & Factory Automation (ETFA), Cagliari, Italy, 10–13 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Ishak, N.; Tajjudin, M.; Ismail, H.; Rahiman, M.H.F.; Sam, Y.M.; Adnan, R. PID Studies on Position Tracking Control of an Electro-Hydraulic Actuator. Int. J. Control. Sci. Eng. 2012, 2, 120–126. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.M.; Park, S.H.; Song, J.H.; Kim, J.S. Robust Position Control of Electro-Hydraulic Actuator Systems Using the Adaptive Back-Stepping Control Scheme. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2010, 224, 737–746. [Google Scholar] [CrossRef]
- Ji, X.; Wang, C.; Zhang, Z.; Chen, S.; Guo, X. Nonlinear adaptive position control of hydraulic servo system based on sliding mode back-stepping design method. Proc. Inst. Mech. Eng. Part. I J. Syst. Control. Eng. 2021, 235, 474–485. [Google Scholar] [CrossRef]
- Li, Z.; Xing, K. Application of fuzzy PID controller for electro-hydraulic servo position control system. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; pp. 158–162. [Google Scholar] [CrossRef]
- Do, T.C.; Tran, D.T.; Dinh, T.Q.; Ahn, K.K. Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller. Electronics 2020, 9, 926. [Google Scholar] [CrossRef]
- Hu, X.; Al-Ani, D.; Habibi, S. A new Sliding Mode Controller for Electro-Hydraulic Actuator (EHA) applications. In Proceedings of the 2015 International Workshop on Recent Advances in Sliding Modes (RASM), Istanbul, Turkey, 9–11 April 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Shi, Z.; Tang, Z.; Pei, Z. Sliding Mode Control for Electrohydrostatic Actuator. Hindawi Publ. Corp. J. Control. Sci. Eng. 2014, 2014, 481970. [Google Scholar] [CrossRef] [Green Version]
- Thomas, A.T.; Parameshwaran, R.; Sathiyavathi, S.; Starbino, A.V. Improved Position Tracking Performance of Electro Hydraulic Actuator Using PID and Sliding Mode Controller. IETE J. Res. 2019, 1–13. [Google Scholar] [CrossRef]
- Tri, N.M.; Nam, D.N.C.; Park, H.G.; Ahn, K.K. Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme. Mechatronics 2014, 29, 96–102. [Google Scholar] [CrossRef]
- Ahn, K.K.; Doan, N.; Jin, M. Adaptive Backstepping Control of an Electrohydraulic Actuator. Mechatronics. IEEE ASME Trans. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Guo, Q.; Shi, G.; Wang, D.; He, C. “Neural network–based adaptive composite dynamic surface control for electro-hydraulic system with very low velocity. Proc. Inst. Mech. Eng. Part. I J. Syst. Control. Eng. 2017, 231, 867–880. [Google Scholar] [CrossRef]
- Liem, D.T.; Truong, D.Q.; Park, H.G.; Ahn, K.K. A feedforward neural network fuzzy grey predictor-based controller for force control of an electro-hydraulic actuator. Int. J. Precis. Eng. Manuf. 2016, 17, 309–321. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, Z.; Zhou, Y.; Liu, Y. Adaptive Neural Network Saturated Control for MDF Continuous Hot Pressing Hydraulic System with Uncertainties. IEEE Access 2018, 6, 2266–2273. [Google Scholar] [CrossRef]
- Li, W.; Shi, G. RBF Neural Network Sliding Mode Control for Electro Hydraulic Servo System. Chin. Hydraul. Pneum. 2019, 109–114. [Google Scholar]
- Ossmann, D.; van der Linden, F.L.J. Advanced sensor fault detection and isolation for electro-mechanical flight actuators. In Proceedings of the 2015 NASA/ESA Conference on Adaptive Hardware and Systems (AHS), Montreal, QC, Canada, 15–18 June 2015; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Mitra, D.; Halder, P.; Mukhopadhyay, S. Improved Fault Detection and Isolation of Small Faults using Multiple Residual Generators and Complex Detection Hypotheses: Case Study of an Electro-Hydraulic Aerospace Actuator. In Proceedings of the Annual Conference of the PHM Society, Scottsdale, AZ, USA, 21–22 September 2019. [Google Scholar] [CrossRef]
- Li, T.; Yu, Y.; Wang, J.; Xie, R.; Wang, X. Sensor fault diagnosis for electro-hydraulic actuator based on QPSO-LSSVR. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1051–1056. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Shi, P. Fault Diagnosis and Fault-Tolerant Control Based on Adaptive Control Approach; Springer International Publishing AG: Cham, Switzerland, 2017; ISBN 978-3-319-52529-7. [Google Scholar]
- Liu, H.; Liu, D.; Lu, C.; Wang, X. Fault diagnosis of hydraulic servo system using the unscented Kalman filter. Asian J. Control 2014, 16, 1713–1725. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A Survey on Active Fault-Tolerant Control Systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Blanke, M. Fault-tolerant Control Systems. In Advances in Control; Frank, P.M., Ed.; Springer: London, UK, 1999. [Google Scholar] [CrossRef]
- Nahian, S.A.; Truong, D.Q.; Chowdhury, P.; Das, D.; Ahn, K.K. Modeling and fault tolerant control of an electro-hydraulic actuator. Int. J. Precis. Eng. Manuf. 2016, 17, 1285–1297. [Google Scholar] [CrossRef] [Green Version]
- Mhaskar, P.; Liu, J.; Christofides, P.D. Fault-Tolerant Process Control: Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2012; ISBN 144714807X. [Google Scholar]
- Zarei, J.; Shokri, E. Robust sensor fault detection based on nonlinear unknown input observer. Measurement 2014, 48, 355–367. [Google Scholar] [CrossRef]
- Hashemi, M.; Egoli, A.K.; Naraghi, M.; Tan, C.P. Saturated fault tolerant control based on partially decoupled unknown-input observer: A new integrated design strategy. IET Control Theory Appl. 2019, 13, 2104–2113. [Google Scholar] [CrossRef]
- Oghbaee, A.; Shafai, B.; Nazari, S. Complete characterisation of disturbance estimation and fault detection for positive systems. IET Control Theory Appl. 2018, 12, 883–891. [Google Scholar] [CrossRef]
- Amrane, A.; Larabic, A.; Aitouche, A. Unknown input observer design for fault sensor estimation applied to induction machine. Math. Comput. Simul. 2020, 167, 415–428. [Google Scholar] [CrossRef]
- Tan, N.V.; Cheolkeun, H. Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator. Processes 2019, 7, 89. [Google Scholar]
- Tan, N.V.; Cheolkeun, H. Experimental Study of Sensor Fault-Tolerant Control for an Electro-Hydraulic Actuator Based on a Robust Nonlinear Observer. Energies 2019, 12, 4337. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Jiang, B.; Shi, P.; Cocquempot, V. Observer-Based Fault Estimation Techniques; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; ISBN 978-3-319-67491-9. [Google Scholar]
- Liu, X.; Gao, Z.; Zhang, A. Robust Fault Tolerant Control for Discrete-Time Dynamic Systems with Applications to Aero Engineering Systems. IEEE Access 2018, 6, 18832–18847. [Google Scholar] [CrossRef]
- Gao, S.; Ma, G.; Guo, Y.; Zhang, W. Augmented System Observer-based Robust Fault-estimation Scheme for Nonlinear Systems. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 4350–4355. [Google Scholar] [CrossRef]
- Noura, H.; Theilliol, D.; Ponsart, J.C.; Chamseddine, A. Fault-Tolerant Control. Systems Design and Practical Applications; Michael, J.G., Michael, A.J., Eds.; Springer: Dordrecht, The Netherlands; Heidelberg, Germany; London, UK; New York, NY, USA, 2009; ISBN 978-1-84882-652-6. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Z.; Raïssi, T.; Wang, Y.; Shen, Y. A state augmentation approach to interval fault estimation for descriptor systems. Eur. J. Control 2020, 51, 19–29. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C.; Tan, C.P. Fault Detection and Fault-Tolerant Control Using Sliding Modes. In Advances in Industrial Control; Springer: London, UK, 2011. [Google Scholar] [CrossRef]
- Chaves, E.R.Q.; de ADantas, A.F.O.; Maitelli, A.L. Unknown Input Observer-based Actuator and Sensor Fault Estimation Technique for Uncertain Discrete Time Takagi-Sugeno Systems. Int. J. Control. Autom. Syst. 2020, 19, 2444–2454. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, F.; Wang, X.; Bu, X. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2015, 13, 1037–1046. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Aitouche, A.; Christov, N. Sliding mode observer design for fault and disturbance estimation using Takagi–Sugeno model. Eur. J. Control. 2018, 44, 114–122. [Google Scholar] [CrossRef]
- Kaheni, M.; Zarif, M.H.; Kalat, A.A.; Chisci, L. Robust feedback linearization for input-constrained nonlinear systems with matched uncertainties. In Proceedings of the IEEE 2018 17th European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2947–2952. [Google Scholar] [CrossRef]
- Kaheni, M.; Hadad Zarif, M.; Akbarzadeh Kalat, A.; Chisci, L. Radial pole path approach for fast response of affine constrained nonlinear systems with matched uncertainties. Int. J. Robust Nonlinear Control 2020, 30, 142–158. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Values | Units |
|---|---|---|
| Ah | 0.0013 | m2 |
| Ar | 9.4 × 10−4 | m2 |
| Vch | 2.09 × 10−4 | m3 |
| Vcr | 4.0065 × 10−5 | m3 |
| mp | 10 | kg |
| βe | 2.9 × 108 | Pa |
| Ksp | 2383 | Nm |
| Dp | 3.5 × 10-6 | m3 |
| Time Period | Error Value | Error Performance ηξ | |||
|---|---|---|---|---|---|
| μξmax | μsξmax | μasξmax | ηsξ | ηasξ | |
| From 1 s to 5 s | 1.634545 | 0.049849 | 0.042386 | 96.95026 | 97.40684 |
| From 5 s to 8 s | 0.224818 | 0.022824 | 0.022793 | 89.84799 | 89.86136 |
| From 8 s to 11 s | 0.099249 | 0.02229 | 0.022377 | 77.54112 | 77.45363 |
| From 11 s to 15 s | 0.340294 | 0.032808 | 0.022219 | 90.35901 | 93.47057 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Nguyen, T.; Tran, H.Q.; Nguyen, K.D. Robust Control Optimization Based on Actuator Fault and Sensor Fault Compensation for Mini Motion Package Electro-Hydraulic Actuator. Electronics 2021, 10, 2774. https://doi.org/10.3390/electronics10222774
Van Nguyen T, Tran HQ, Nguyen KD. Robust Control Optimization Based on Actuator Fault and Sensor Fault Compensation for Mini Motion Package Electro-Hydraulic Actuator. Electronics. 2021; 10(22):2774. https://doi.org/10.3390/electronics10222774
Chicago/Turabian StyleVan Nguyen, Tan, Huy Q. Tran, and Khoa Dang Nguyen. 2021. "Robust Control Optimization Based on Actuator Fault and Sensor Fault Compensation for Mini Motion Package Electro-Hydraulic Actuator" Electronics 10, no. 22: 2774. https://doi.org/10.3390/electronics10222774