
Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology



Abstract
:1. Introduction
1.1. Background
1.2. State of the Art
1.3. Motivation and Objectives
1.4. Problem Statement and Contributions
- Security is discussed, and deliberation given to the categories of robots.
- The concept of the control system is presented, the semantics of communication are given great consideration.
- A general concept of the control system decomposition with particular emphasis on network security is given.
- The role of artificial intelligence techniques in the safety of networked robotic systems is presented.
- The mitigation of the cyberattack impacts it also addressed.
1.5. Paper Organization
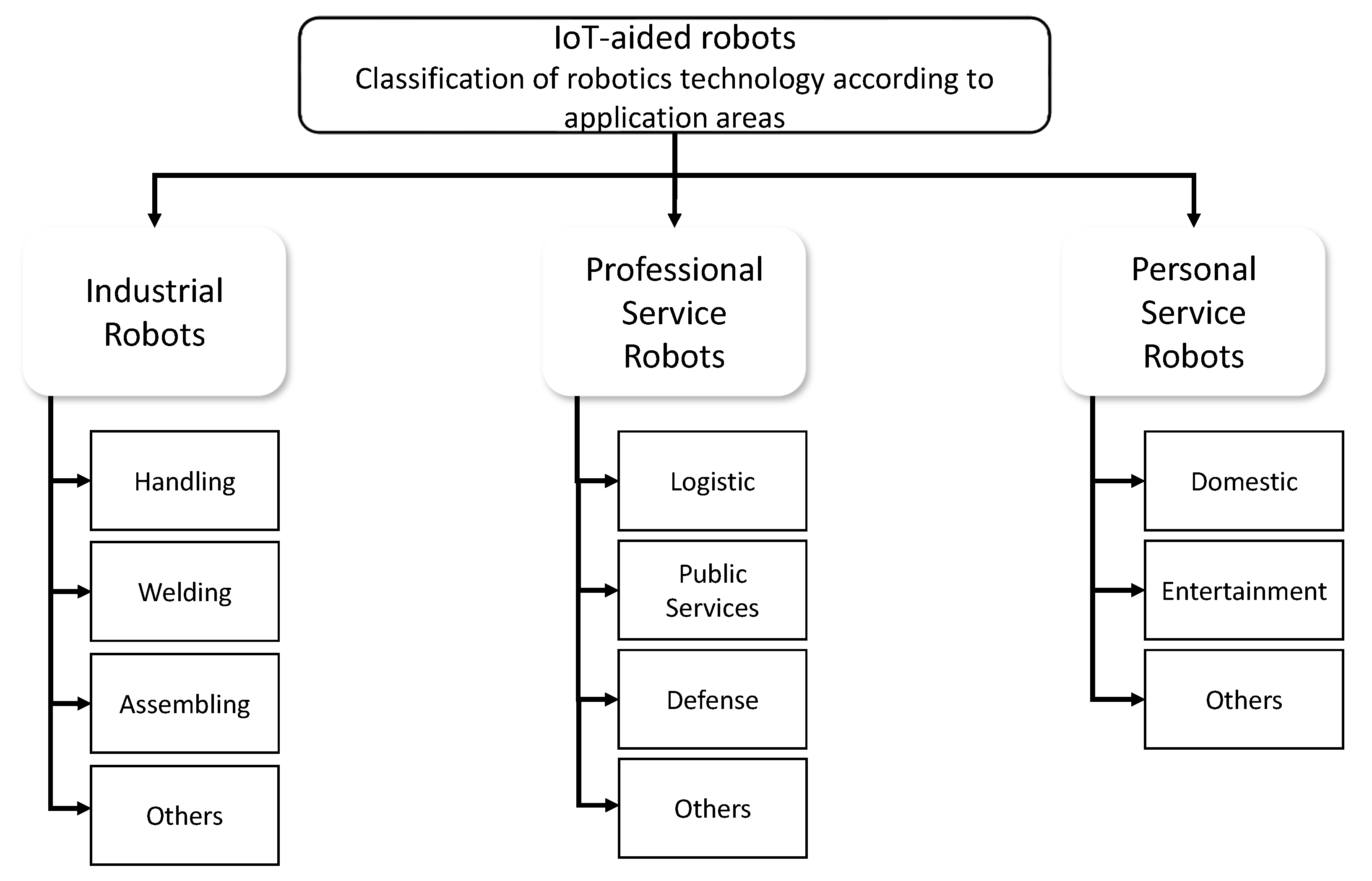
2. Robot Application Domains
2.1. Background
2.2. Industrial Robotic Systems
2.3. Service Robotic Systems: Professional and Personal
3. Network Interfaces for IoT-Aided Robotic Systems
3.1. Design Methodology
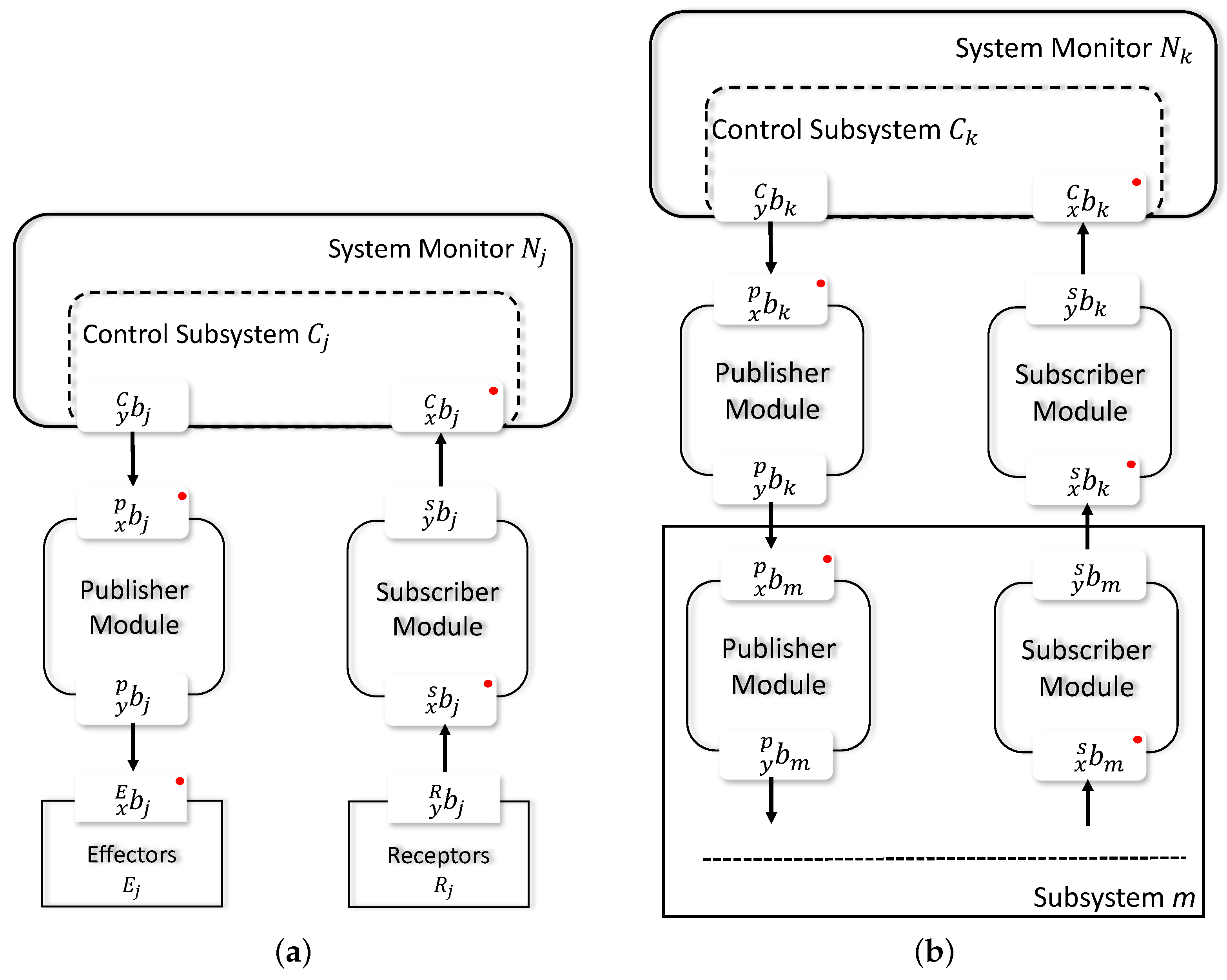
3.2. General Concept
- —controller responsible for data processing and decision making;
- —system monitor;
- —effectors receiving commands from the control subsystem via the publisher module in order to influence the surroundings; they can be real effectors (e.g., motors) or virtual effectors, e.g., data or information repositories for the control subsystem;
- —a subscriber responsible for establishing a connection between another subsystem or receptor; the subscriber is the passive side waiting for the data package delivery (it is a receiver according to the QNX philosophy);
- —receptors responsible for collecting information taking into account the task performed; they can be real receptors or virtual receptors, e.g., data repositories holding useful data or information;
- —publisher responsible for establishing a connection between another subsystem or effector; the publisher is an active side in initializing the data packages’ sending (it is a sender according to the QNX philosophy).
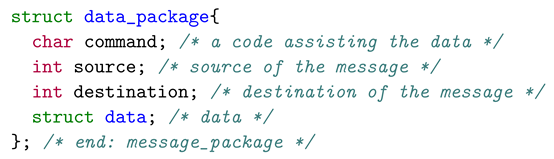
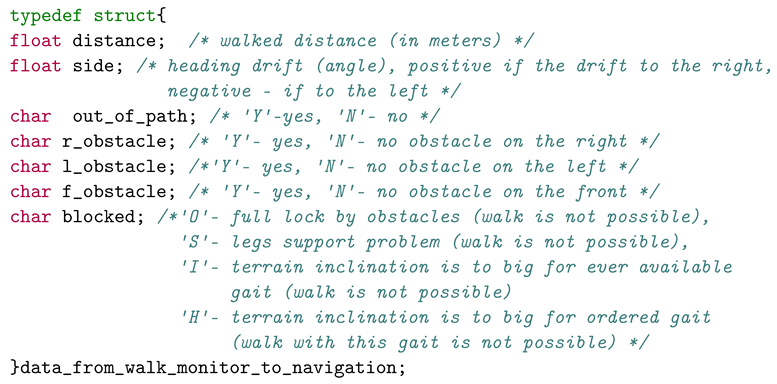
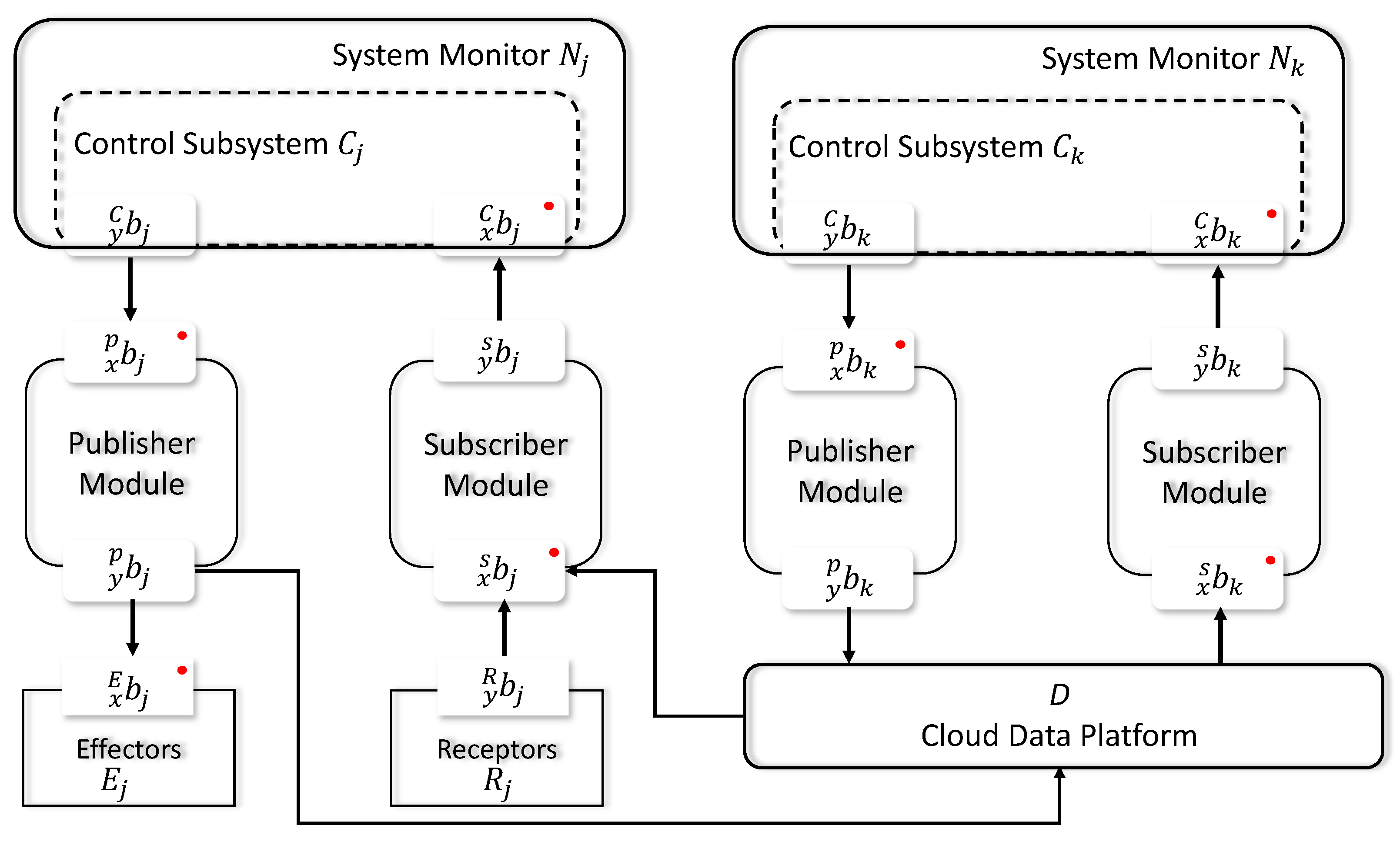
3.3. Communication



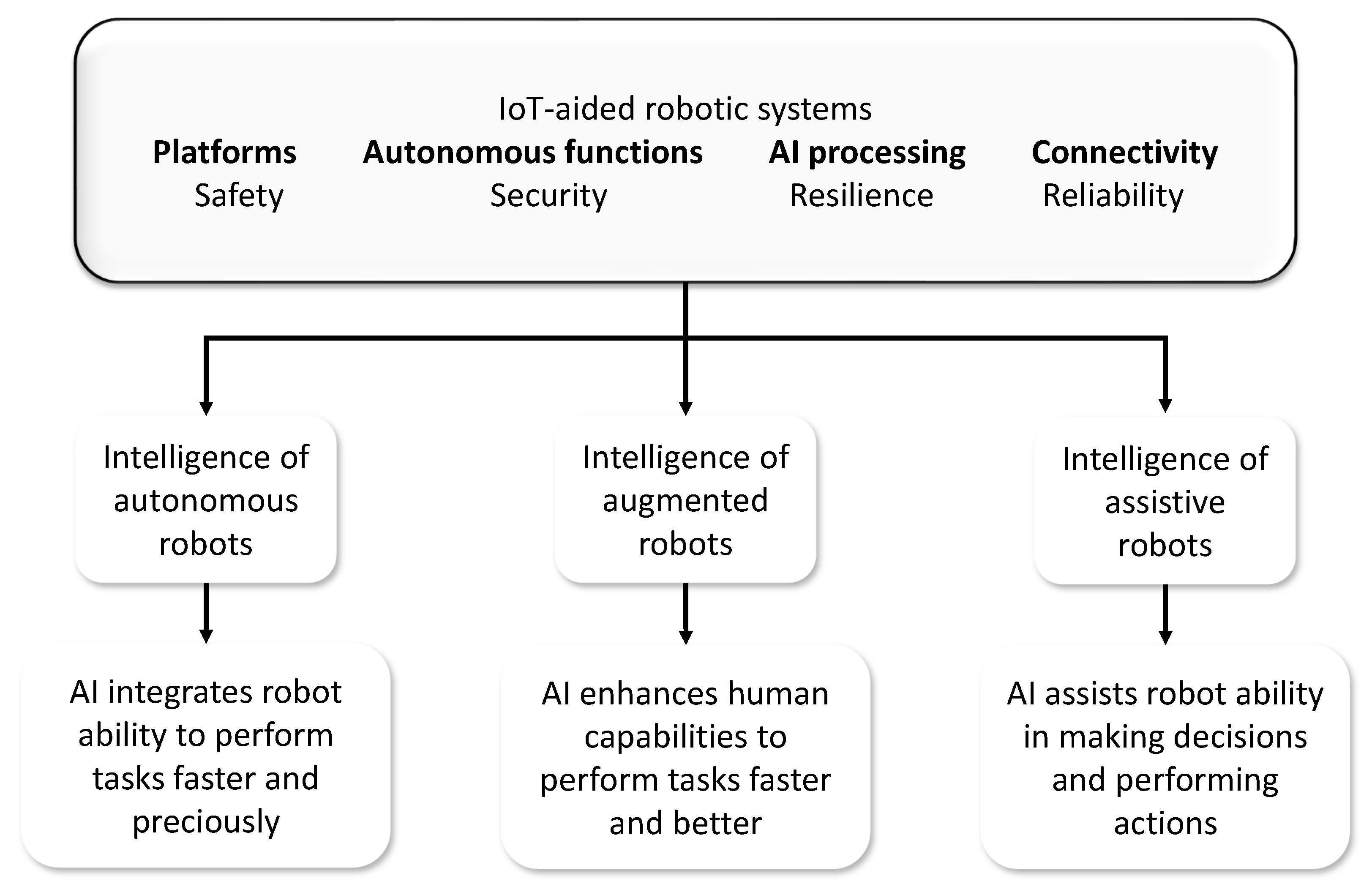
4. Artificial Intelligence in IoT-Aided Robotic Communication
5. Discussion
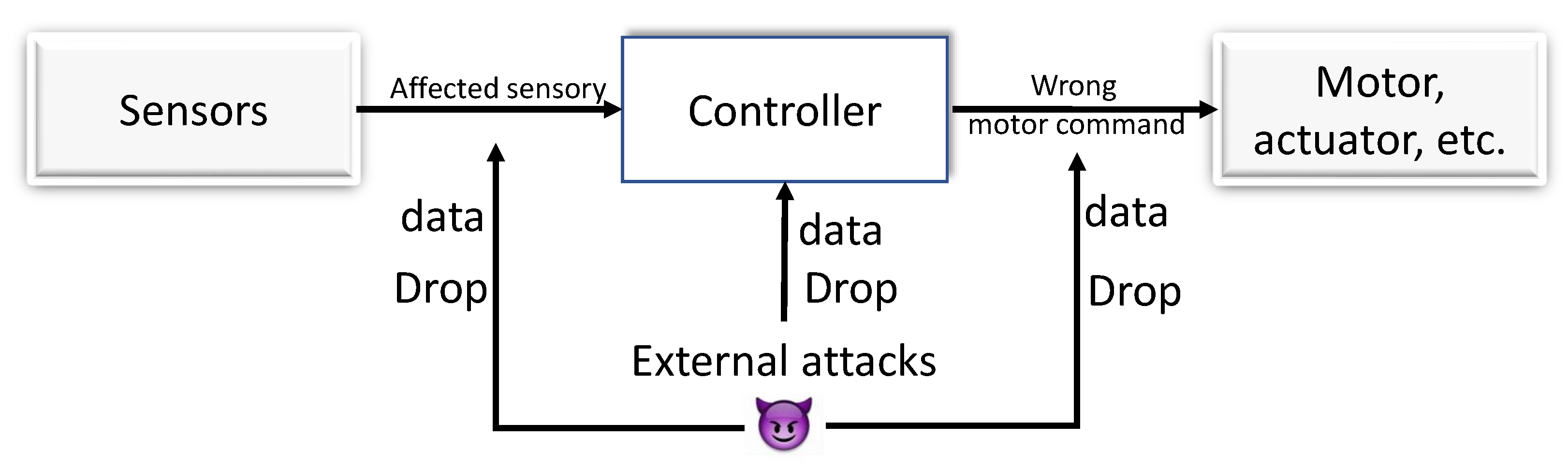
- More research is needed to improve Quality of Service (QoS) and Quality of Control (QoC) measures. The communication channels of distributed robotic systems make an attractive object for attacks.
- Another important issue is to elaborate solutions for safe cloud computing considering the communication protocols, the wireless link parameters, and the end-to-end latency, and overall system reliability [24].
- The security of the data transmission should be enhanced in the existing communication models and determine a new set of solutions with a higher level of security.
- Connecting and exchanging information through the networks supports autonomous cognitive decisions [35]. This topic has been recently explored by the cooperation of the IoT and robotics experts.
- The need for real-time safety is highly desired for preventing, after detecting, any anomaly; the robotic system instantly disconnects and/or turns off its elements [31].
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CPS | Cyber Physical System |
| IoT | Internet of Things |
| QoS | Quality of Service |
| QoC | Quality of Control |
| NID | Network Intrusion Detection |
| AD | Anomaly Detection |
| HRI | Human–Robot Interaction |
| TCP | Transmission Control Protocol |
| M2M | Machine-to-Machine |
| M2C | Machine-to-Cloud |
| TLS | Transport Layer Security |
| IPv6 | Internet Protocol version 6 |
| FSM | Finite State Machine |
| HHI | Human–Human Interaction |
| HRC | Human–Robot Collaboration |
| ICT | Information and Communication Technology |
| IFR | International Federation of Robotics |
| NSA | National Security Agency, USA |
| NIST | National Institute of Standard and Technology, USA |
| UNECE | United Nations Economic Commission for Europe |
| VR/AR | Virtual and Augment Reality |
| IoE | Internet of Everything |
| IoRT | Internet of Robotic Thing |
| GDPR | General Data Protection Regulation |
References
- Khalid, A.; Kirisci, P.; Khan, Z.H.; Ghrairi, Z.; Thoben, K.D.; Pannek, J. Security framework for industrial collaborative robotic cyber–physical systems. Comput. Ind. 2018, 97, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Sunder, S. Foundations for innovation in cyber–physical systems. In Proceedings of the NIST CPS Workshop, Chicago, IL, USA, 13–14 March 2012; Volume 13, pp. 1–12. [Google Scholar]
- Dutta, V.; Zielinska, T. Networking technologies for robotic applications. arXiv 2015, arXiv:1505.07593. [Google Scholar]
- Dreyer, I.; Stang, G. Foresight in governments–practices and trends around the world. In Yearbook of European Security; EU Institute for Security Studies: Paris, France, 2013; Volume 1368, pp. 1–26. [Google Scholar]
- Hon, W.K.; Millard, C.; Singh, J. Twenty legal considerations for clouds of things. In Queen Mary School of Law Legal Studies Research Paper; SSRN: Rochester, NY, USA, 2016; Volume 216, pp. 1–47. [Google Scholar]
- Fosch-Villaronga, E.; Millard, C. Cloud robotics law and regulation: Challenges in the governance of complex and dynamic cyber–physical ecosystems. Robot. Auton. Syst. 2019, 119, 77–91. [Google Scholar] [CrossRef]
- Tapus, A.; Fasola, J.; Mataric, M.J. Socially assistive robots for individuals suffering from dementia. In Proceedings of the ACM/IEEE 3rd Human–Robot Interaction International Conference, Workshop on Robotic Helpers: User Interaction, Interfaces and Companions in Assistive and Therapy Robotics, Amsterdam, The Netherlands, 12–15 March 2008; pp. 1–5. [Google Scholar]
- Danaher, J.; McArthur, N. Robot Sex: Social and Ethical Implications; MIT Press: Cambridge, MA, USA, 2017; pp. 1–295. [Google Scholar]
- Yen, C.T.; Liu, Y.C.; Lin, C.C.; Kao, C.C.; Wang, W.B.; Hsu, Y.R. Advanced manufacturing solution to industry 4.0 trend through sensing network and cloud computing technologies. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), New Taipei, Taiwan, 18–22 August 2014; pp. 1150–1152. [Google Scholar]
- Kohler, D.; Hickman, R.; Conley, K.; Gerkey, B. Cloud robotics. In Proceedings of the Google I/O 2011 Developer Conference, San Francisco, CA, USA, 10–11 May 2011; pp. 21–28. [Google Scholar]
- Zacepins, A.; Kviesis, A.; Ahrendt, P.; Richter, U.; Tekin, S.; Durgun, M. Beekeeping in the future—Smart apiary management. In Proceedings of the 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 808–812. [Google Scholar]
- Moktadir, M.A.; Ali, S.M.; Kusi-Sarpong, S.; Shaikh, M.A.A. Assessing challenges for implementing Industry 4.0: Implications for process safety and environmental protection. Process. Saf. Environ. Prot. 2018, 117, 730–741. [Google Scholar] [CrossRef]
- Blue Frog Robotics & Robotics. Buddy, the Companion Robot. 2018, pp. 1–7. Available online: www.bluefrogrobotics.com/en/buddy (accessed on 13 September 2021).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, pp. 5–9. [Google Scholar]
- Alzetta, F.; Giorgini, P. Towards a real-time BDI model for ROS 2. In Proceedings of the Workshop “From Objects to Agents”, Parma, Italy, 26–28 June 2019; pp. 1–7. [Google Scholar]
- Stampfer, D.; Lutz, M.; Schlegel, C. Robot programming. In Mechatronics and Robotics; CRC Press: Boca Raton, FL, USA, 2020; pp. 161–194. [Google Scholar]
- Maruyama, Y.; Kato, S.; Azumi, T. Exploring the performance of ROS2. In Proceedings of the 13th International Conference on Embedded Software, Chengdu, China, 13–14 August 2016; pp. 1–10. [Google Scholar]
- Choi, H.; Xiang, Y.; Kim, H. PiCAS: New design of priority-driven chain-aware scheduling for ROS2. In Proceedings of the IEEE 27th Real-Time and Embedded Technology and Applications Symposium (RTAS), Nashville, TN, USA, 18–21 May 2021; pp. 251–263. [Google Scholar]
- Choi, H.; Karimi, M.; Kim, H. Chain-based fixed-priority scheduling of loosely-dependent tasks. In Proceedings of the IEEE 38th International Conference on Computer Design (ICCD), Hartford, CT, USA, 18–21 October 2020; pp. 631–639. [Google Scholar]
- Abdullah, J.; Dai, G.; Yi, W. Worst-case cause-effect reaction latency in systems with non-blocking communication. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Florence, Italy, 25–29 March 2019; pp. 1625–1630. [Google Scholar]
- Dieber, B.; Breiling, B.; Taurer, S.; Kacianka, S.; Rass, S.; Schartner, P. Security for the robot operating system. Robot. Auton. Syst. 2017, 98, 192–203. [Google Scholar] [CrossRef]
- Wang, C.; Tok, Y.C. How to secure autonomous mobile robots? An approach with fuzzing, detection and mitigation. J. Syst. Archit. 2021, 112, 101–129. [Google Scholar] [CrossRef]
- Abouaf, J. Trial by fire: Teleoperated robot targets Chernobyl. IEEE Comput. Graph. Appl. 1998, 18, 10–14. [Google Scholar] [CrossRef]
- Vermesan, O.; Bahr, R.; Ottella, M.; Serrano, M.; Karlsen, T.; Wahlstrøm, T.; Sand, H.E.; Ashwathnarayan, M.; Gamba, M.T. Internet of robotic things intelligent connectivity and platforms. Front. Robot. AI Front. 2020, 7, 104. [Google Scholar] [CrossRef]
- Vermesan, O.; Bacquet, J. Cognitive Hyperconnected Digital Transformation: Internet of Things Intelligence Evolution; River Publishers: Gistrup, Denmark, 2017; pp. 8–12. [Google Scholar]
- Zhao, Z.G.; Ye, R.B.; Zhou, C.; Wang, D.H.; Shi, T. Control-theory based security control of cyber–physical power system under multiple cyber-attacks within unified model framework. Cogn. Robot. 2021, 1, 41–57. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication theory of secrecy systems. Nokia Bell Labs 1949, 28, 656–715. [Google Scholar] [CrossRef]
- Kwon, C.; Liu, W.; Hwang, I. Security analysis for cyber–physical systems against stealthy deception attacks. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 3344–3349. [Google Scholar]
- Hussain, R.; Zielinska, T.; Hexel, R. Finite state automaton based control system for walking machines. Int. J. Adv. Robot. Syst. 2019, 16, 814–830. [Google Scholar] [CrossRef]
- Dash, P.; Karimibiuki, M.; Pattabiraman, K. Stealthy Attacks Against Robotic Vehicles Protected by Control-Based Intrusion Detection Techniques; ACM: New York, NY, USA, 2021; Volume 2, pp. 1–25. [Google Scholar]
- Yaacoub, J.P.A.; Noura, H.N.; Salman, O.; Chehab, A. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations. Int. J. Inf. Secur. 2021, 1–44. [Google Scholar] [CrossRef]
- Yaacoub, J.P.A.; Salman, O.; Noura, H.N.; Kaaniche, N.; Chehab, A.; Malli, M. Cyber–physical systems security: Limitations, issues and future trends. Microprocess. Microsyst. 2020, 77, 103–119. [Google Scholar] [CrossRef]
- Villaronga, E.F.; Kieseberg, P.; Li, T. Humans forget, machines remember: Artificial intelligence and the right to be forgotten. Comput. Law Secur. Rev. 2018, 34, 304–313. [Google Scholar] [CrossRef] [Green Version]
- Soldatos, J.; Kyriazakos, S.; Ziafati, P.; Mihovska, A. Securing IoT Applications with Smart Objects: Framework and a Socially Assistive Robots Case Study. Wirel. Pers. Commun. 2021, 117, 261–280. [Google Scholar] [CrossRef]
- Radanliev, P.; De Roure, D.; Page, K.; Nurse, J.R.; Mantilla Montalvo, R.; Santos, O.; Maddox, L.; Burnap, P. Cyber risk at the edge: Current and future trends on cyber risk analytics and artificial intelligence in the industrial internet of things and industry 4.0 supply chains. Cybersecurity 2020, 3, 1–21. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Mahapatra, S.N.; Singh, B.K.; Kumar, V. A survey on secure transmission in internet of things: Taxonomy, recent techniques, research requirements, and challenges. Arab. J. Sci. Eng. 2020, 45, 6211–6240. [Google Scholar] [CrossRef]
- Razafimandimby, C.; Loscri, V.; Vegni, A.M. Towards efficient deployment in Internet of Robotic Things. In Integration, Interconnection, and Interoperability of IoT Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 21–37. [Google Scholar]
- Gupta, J.K.; Egorov, M.; Kochenderfer, M. Cooperative multi-agent control using deep reinforcement learning. In Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Sao Paulo, Brazil, 8–12 May 2017; pp. 66–83. [Google Scholar]
- Sunehag, P.; Lever, G.; Gruslys, A.; Czarnecki, W.M.; Zambaldi, V.; Jaderberg, M.; Lanctot, M.; Sonnerat, N.; Leibo, J.Z.; Tuyls, K. Value-decomposition networks for cooperative multi-agent learning. arXiv 2017, arXiv:1706.05296. [Google Scholar]
- Guiochet, J.; Machin, M.; Waeselynck, H. Safety-critical advanced robots: A survey. Robot. Auton. Syst. 2017, 94, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Jahan, F.; Sun, W.; Niyaz, Q.; Alam, M. Security Modeling of Autonomous Systems: A Survey; ACM: New York, NY, USA, 2019; Volume 52, pp. 1–34. [Google Scholar]
- Mayoral-Vilches, V.; Carbajo, U.A.; Gil-Uriarte, E. Industrial robot ransomware: Akerbeltz. In Proceedings of the 2020 Fourth IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 9–11 November 2020; pp. 432–435. [Google Scholar]
- Sandry, E. Re-evaluating the form and communication of social robots. Int. J. Soc. Robot. 2015, 7, 335–346. [Google Scholar] [CrossRef] [Green Version]
- Fink, J. Communication for Teams of Networked Robots. Ph.D. Thesis, University of Pennsylvania, Philadelphia, PA, USA, 2011. [Google Scholar]
- Bonaci, T.; Herron, J.; Yusuf, T.; Yan, J.; Kohno, T.; Chizeck, H.J. To make a robot secure: An experimental analysis of cyber security threats against teleoperated surgical robots. arXiv 2015, arXiv:1504.04339. [Google Scholar]
- Quarta, D.; Pogliani, M.; Polino, M.; Maggi, F.; Zanchettin, A.M.; Zanero, S. An experimental security analysis of an industrial robot controller. In Proceedings of the IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2017; pp. 268–286. [Google Scholar]
- Sabaliauskaite, G.; Ng, G.S.; Ruths, J.; Mathur, A. A comprehensive approach, and a case study, for conducting attack detection experiments in Cyber–Physical Systems. Robot. Auton. Syst. 2017, 98, 174–191. [Google Scholar] [CrossRef]
- Salvini, P.; Ciaravella, G.; Yu, W.; Ferri, G.; Manzi, A.; Mazzolai, B.; Laschi, C.; Oh, S.R.; Dario, P. How safe are service robots in urban environments? Bullying a robot. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 1–7. [Google Scholar]
- Kirschgens, L.A.; Ugarte, I.Z.; Uriarte, E.G.; Rosas, A.M.; Vilches, V.M. Robot hazards: From safety to security. arXiv 2018, arXiv:1806.06681. [Google Scholar]
- Bhardwaj, A.; Avasthi, V.; Goundar, S. Cyber security attacks on robotic platforms. Netw. Secur. 2019, 2019, 13–19. [Google Scholar] [CrossRef]
- Simoens, P.; Dragone, M.; Saffiotti, A. The Internet of Robotic Things: A review of concept, added value and applications. Int. J. Adv. Robot. Syst. 2018, 15, 172–196. [Google Scholar] [CrossRef]
- King, H.; Hannaford, B. Breaking the Ineroperability Barrier Through Emerging Standards in Teleoperation; Technical Report; University of Washington: Seattle, WA, USA, 2009; pp. 1–19. [Google Scholar]
- Yu, W.; Xu, G.; Pham, K.; Blasch, E.; Chen, G.; Shen, D.; Moulema, P. A faramework for cyber–physical system security situation awareness. In Principles of Cyber–Physical Systems: An Interdisciplinary Approach; Cambridge University Press: Cambridge, UK, 2020; pp. 229–238. [Google Scholar]
- Robotics, D. IFR International Federation of Robotics—Service Robots; International Federation of Robotics: Frankfurt, Germany, 2017; pp. 1–12. [Google Scholar]
- Bottalico, B.; Santosuosso, A. ELS Issues in Robotics and Steps to Consider Them. Part 2: Robotics and Regulations; ResearchGate: Berlin, Germany, 2016. [Google Scholar]
- Voss, W.G. European union data privacy law reform: General data protection regulation, privacy shield, and the right to delisting. Bus. Lawyer 2016, 72, 221–234. [Google Scholar]
- Leenes, R.; Lucivero, F. Laws on robots, laws by robots, laws in robots: Regulating robot behaviour by design. Law Innov. Technol. Taylor Fr. 2014, 6, 193–220. [Google Scholar] [CrossRef]
- Martín, F.; Soriano, E.; Cañas, J.M. Quantitative analysis of security in distributed robotic frameworks. Robot. Auton. Syst. 2018, 100, 95–107. [Google Scholar] [CrossRef]
- Petukhov, V.A. The taxation system in the conditions of production robotization. In Human and Technological Progress Towards the Socio-Economic Paradigm of the Future; De Gruyter: Berlin, Germany, 2020; pp. 241–250. [Google Scholar]
- Villani, V.; Pini, F. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Main, B.W. Advancing an international standard on machinery safety. Prof. Saf. 2009, 54, 20–22. [Google Scholar]
- Bell, R. Introduction to IEC 61508. In ACM International Conference Proceeding Series; Citeseer: State College, PA, USA, 2006; Volume 162, pp. 3–12. [Google Scholar]
- Jocelyn, S.; Baudoin, J.; Chinniah, Y.; Charpentier, P. Feasibility study and uncertainties in the validation of an existing safety-related control circuit with the ISO 13849-1: 2006 design standard. Reliab. Eng. Syst. Saf. 2014, 121, 104–112. [Google Scholar] [CrossRef]
- Smith, D.J.; Simpson, K.G. Safety Critical Systems Handbook: A Straight Forward Guide to Functional Safety, IEC 61508 (2010 Edition) and Related Standards, Including Process IEC 61511 and Machinery IEC 62061 and ISO 13849; Elsevier: Amsterdam, The Netherlands, 2010; pp. 1–9. [Google Scholar]
- Kurkiewicz, J.; Salwa, M.; Majewska, A.; Zylka, L.; Kuciak, A. Radiation shielding swing door drive control system for linear accelerator bunkers. Lett. Oncol. Sci. 2020, 17, 11–15. [Google Scholar] [CrossRef]
- Mariscal Saldaña, M.Á.; González Pérez, J.; Khalid, A.; Gutiérrez Llorente, J.M.; García Herrero, S. Risks management and cobots. In Identifying critical variables. In Proceedings of the 29th European Safety and Reliability Conference (ESREL), Helsinki, Finland, 25–29 June 2011; Volume 10218, pp. 1–18. [Google Scholar]
- Robla-Gómez, S.; Becerra, V.; Llata, J.R.; Gonzalez-Sarabia, E.; Torre-Ferrero, C.; Perez-Oria, J. Working together: A review on safe human–robot collaboration in industrial environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Galin, R.; Meshcheryakov, R. Review on human–robot interaction during collaboration in a shared workspace. In Proceedings of the International Conference on Interactive Collaborative Robotics, Istanbul, Turkey, 20–25 August 2019; pp. 63–74. [Google Scholar]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success factors for introducing industrial human–robot interaction in practice: An empirically driven framework. Int. J. Adv. Manuf. Technol. 2021, 112, 685–704. [Google Scholar] [CrossRef]
- Iglesiasa, I.; Sebastiána, M.; Aresc, J. Overview of the state of robotic machining: Current situation and future potential. Procedia Eng. 2015, 132, 911–917. [Google Scholar] [CrossRef] [Green Version]
- Maurtua, I.; Fernandez, I.; Tellaeche, A.; Kildal, J.; Susperregi, L.; Ibarguren, A.; Sierra, B. Natural multimodal communication for human–robot collaboration. Int. J. Adv. Robot. Syst. 2017, 14, 189–203. [Google Scholar] [CrossRef] [Green Version]
- Berg, J.; Lu, S. Review of interfaces for industrial human–robot interaction. Curr. Robot. Rep. 2020, 1, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Kirchner, E.A.; de Gea Fernandez, J.; Kampmann, P.; Schröer, M.; Metzen, J.H.; Kirchner, F. Intuitive interaction with robots–technical approaches and challenges. In Formal Modeling and Verification of Cyber–Physical Systems; Springer: Berlin/Heidelberg, Germany, 2015; pp. 224–248. [Google Scholar]
- Liu, H.; Wang, L. Remote human–robot collaboration: A cyber–physical system application for hazard manufacturing environment. J. Manuf. Syst. 2020, 54, 24–34. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Gesture recognition for human–robot collaboration: A review. Int. J. Ind. Ergon. 2018, 68, 355–367. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. An AR-based worker support system for human–robot collaboration. Procedia Manuf. 2017, 11, 22–30. [Google Scholar] [CrossRef]
- Alebooyeh, M.; Urbanic, R.J. Neural network model for identifying workspace, forward and inverse kinematics of the 7-DOF YuMi 14000 ABB collaborative robot. IFAC-PapersOnLine 2019, 52, 176–181. [Google Scholar] [CrossRef]
- Khalid, A.; Kirisci, P.; Ghrairi, Z.; Thoben, K.D.; Pannek, J. A methodology to develop collaborative robotic cyber physical systems for production environments. Logist. Res. 2016, 9, 23. [Google Scholar] [CrossRef]
- Sellami, S.; Respall, V.M. Geometric and stiffness modeling and design of calibration experiments for the 7 dof serial manipulator KUKA iiwa 14 R820. arXiv 2020, arXiv:2006.06314. [Google Scholar]
- Bodie, K.; Bellicoso, C.D.; Hutter, M. ANYpulator: Design and control of a safe robotic arm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1119–1125. [Google Scholar]
- Pransky, J. Mobile robots: Big benefits for US military. Ind. Robot. Int. J. 1997, 24, 126–130. [Google Scholar] [CrossRef]
- Zielinska, T. Professional and personal service robots. Int. J. Robot. Appl. Technol. 2016, 4, 63–82. [Google Scholar] [CrossRef]
- Jones, K.S.; Schmidlin, E.A. Human–robot interaction: Toward usable personal service robots. Rev. Hum. Factors Ergon. 2011, 7, 100–148. [Google Scholar] [CrossRef]
- Böhme, H.J.; Wilhelm, T.; Key, J.; Schauer, C.; Schröter, C.; Groß, H.M.; Hempel, T. An approach to multi-modal human–machine interaction for intelligent service robots. Robot. Auton. Syst. 2003, 44, 83–96. [Google Scholar] [CrossRef] [Green Version]
- Foukarakis, M.; Antona, M.; Stephanidis, C. Applying a multimodal user interface development framework on a domestic service robot. In Proceedings of the 10th International Conference on Pervasive Technologies Related to Assistive Environments, Island of Rhodes, Greece, 21–23 June 2017; pp. 378–384. [Google Scholar]
- Dutta, V.; Zielinska, T. Predicting the intention of human activities for real-time human–robot interaction (hri). In Proceedings of the International Conference on Social Robotics, Kansas City, MO, USA, 1–3 November 2016; pp. 723–734. [Google Scholar]
- Dutta, V.; Zielinska, T. Predicting human actions taking into account object affordances. J. Intell. Robot. Syst. 2019, 93, 745–761. [Google Scholar] [CrossRef] [Green Version]
- Dutta, V.; Zielinska, T. Prognosing human activity using actions forecast and structured database. IEEE Access 2020, 8, 6098–6116. [Google Scholar] [CrossRef]
- Newman, B.A.; Aronson, R.M.; Srinivasa, S.S.; Kitani, K.; Admoni, H. Harmonic: A multimodal dataset of assistive human–robot collaboration. arXiv 2018, arXiv:1807.11154. [Google Scholar]
- Celiktutan, O.; Skordos, E.; Gunes, H. Multimodal human–human–robot interactions (mhhri) dataset for studying personality and engagement. IEEE Trans. Affect. Comput. 2017, 10, 484–497. [Google Scholar] [CrossRef] [Green Version]
- Chiarini, G.; Ray, P.; Akter, S.; Masella, C.; Ganz, A. mHealth technologies for chronic diseases and elders: A systematic review. IEEE J. Sel. Areas Commun. 2013, 31, 6–18. [Google Scholar] [CrossRef] [Green Version]
- Reeder, B.; Chung, J.; Stevens-Lapsley, J. Current telerehabilitation research with older adults at home: An integrative review. J. Gerontol. Nurs. 2016, 42, 15–20. [Google Scholar] [CrossRef] [PubMed]
- Vickers, N.J. Animal communication: When i’m calling you, will you answer too? Curr. Biol. 2017, 27, 713–715. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lach, J.; Lo, B.; Yang, G.Z. Toward pervasive gait analysis with wearable sensors: A systematic review. IEEE J. Biomed. Health Inform. 2016, 20, 1521–1537. [Google Scholar] [CrossRef]
- Pal, D.; Triyason, T.; Funikul, S. Smart homes and quality of life for the elderly: A systematic review. In Proceedings of the 2017 IEEE International Symposium on Multimedia (ISM), Taichung, Taiwan, 11–13 December 2017; pp. 413–419. [Google Scholar]
- Dutta, V.; Zielinska, T. Action prediction based on physically grounded object affordances in human-object interactions. In Proceedings of the 11th International Workshop on Robot Motion and Control (RoMoCo), Wasowo Palace, Poland, 3–5 July 2017; pp. 47–52. [Google Scholar]
- de Podestá Gaspar, R.; Bonacin, R.; Gonçalves, V.P. Designing IoT solutions for elderly home care: A systematic study of participatory design, personas and semiotics. In Proceedings of the International Conference on Universal Access in Human-Computer Interaction, Las Vegas, NV, USA, 15–20 July 2018; pp. 226–245. [Google Scholar]
- Maggi, F.; Quarta, D.; Pogliani, M.; Polino, M.; Zanchettin, A.M.; Zanero, S. Rogue Robots: Testing the Limits of an Industrial Robot’s Security; Tech. Rep.; Trend Micro, Politecnico di Milano: Tokyo, Japan, 2017; pp. 1–21. [Google Scholar]
- Ferrer, E.C.; Hardjono, T.; Pentland, A.; Dorigo, M. Secure and secret cooperation in robot swarms. Sci. Robot. 2021, 6, 15–38. [Google Scholar] [CrossRef]
- Cerrudo, C.; Apa, L. Hacking Robots before Skynet; IOActive Website: Seattle, WA, USA, 2017; pp. 1–17. [Google Scholar]
- Fosch-Villaronga, E.; Mahler, T. Cybersecurity, safety and robots: Strengthening the link between cybersecurity and safety in the context of care robots. Comput. Law Secur. Rev. 2021, 41, 105–528. [Google Scholar] [CrossRef]
- Zieliński, C.; Stefańczyk, M.; Kornuta, T.; Figat, M.; Dudek, W.; Szynkiewicz, W.; Kasprzak, W.; Figat, J.; Szlenk, M.; Winiarski, T. Variable structure robot control systems: The RAPP approach. Robot. Auton. Syst. 2017, 94, 226–244. [Google Scholar] [CrossRef] [Green Version]
- Janiak, M.; Zieliński, C. Control system architecture for the investigation of motion control algorithms on an example of the mobile platform Rex. Bull. Pol. Acad. Sci. 2015, 63, 667–678. [Google Scholar] [CrossRef] [Green Version]
- Dudek, W.; Szynkiewicz, W.; Winiarski, T. Cloud computing support for the multi-agent robot navigation system. J. Autom. Mob. Robot. Intell. Syst. 2017, 11, 67–74. [Google Scholar] [CrossRef]
- Kasprzak, W.; Szynkiewicz, W.; Stefańczyk, M.; Dudek, W.; Węgierek, M.; Seredyński, D.; Figat, M.; Zieliński, C. Agent-based approach to the design of a multimodal interface for cyber-security event visualisation control. Bull. Pol. Acad. Sci. 2020, 68, 1187–1205. [Google Scholar]
- Szynkiewicz, W.; Kasprzak, W.; Zieliński, C.; Dudek, W.; Stefańczyk, M.; Wilkowski, A.; Figat, M. Utilisation of embodied agents in the design of smart human–computer interfaces—A Case Study in Cyberspace Event Visualisation Control. Electronics 2020, 9, 976. [Google Scholar] [CrossRef]
- Zielińska, T.; Heng, J. Real-time-based control system for a group of autonomous walking robots. Adv. Robot. 2006, 20, 543–561. [Google Scholar] [CrossRef]
- Estivill-Castro, V.; Hexel, R. Arrangements of Finite-state Machines-Semantics, Simulation, and Model Checking. In Proceedings of the MODELSWARD, Barcelona, Spain, 19–21 February 2013; pp. 182–189. [Google Scholar]
- FP7. European Union Research and Innovation Project. 2012. Available online: http://ec.europa.eu/research/fp7/index_en.cfm (accessed on 19 July 2015).
- Vallati, C.; Mingozzi, E.; Tanganelli, G.; Buonaccorsi, N.; Valdambrini, N.; Zonidis, N.; Martínez, B.; Mamelli, A.; Sommacampagna, D.; Anggorojati, B. Betaas: A platform for development and execution of machine-to-machine applications in the internet of things. Wirel. Pers. Commun. 2016, 87, 1071–1091. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Lee, J.W. OpenIoT: An open service framework for the Internet of Things. In Proceedings of the IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 89–93. [Google Scholar]
- Boano, C.A.; Rmer, K.; Voigt, T. RELYonIT: Dependability for the Internet of Things. IEEE IoT Newsl. Januray 2015, 13, 20–24. [Google Scholar]
- Parodi, A.; Maresca, M.; Provera, M.; Baglietto, P. An IoT Approach for the Connected Vehicle. In Proceedings of the International Internet of Things Summit, Rome, Italy, 27–29 October 2015; pp. 158–161. [Google Scholar]
- Furdik, K.; Pramudianto, F.; Ahlsén, M.; Rosengren, P.; Kool, P.; Zhenyu, S.; Brizzi, P.; Paralic, M.; Schneider, A. Food traceability chain supported by the ebbits IoT middleware. In Dynamics in Logistics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 343–353. [Google Scholar]
- Dillon, E.; Power, G.; Grant, F.C. Experimental testing in the future internet PERIMETER project. In Future Internet Symposium; Springer: Berlin/Heidelberg, Germany, 2010; pp. 30–39. [Google Scholar]
- Figat, M.; Zieliński, C. Robotic system specification methodology based on hierarchical Petri nets. IEEE Access 2020, 8, 71617–71627. [Google Scholar] [CrossRef]
- Polk, T.; McKay, K.; Chokhani, S. Guidelines for the selection, configuration, and use of transport layer security (TLS) implementations. NIST Spec. Publ. 2014, 800, 32–35. [Google Scholar]
- Linardatos, P.; Papastefanopoulos, V.; Kotsiantis, S. Explainable AI: A review of machine learning interpretability methods. Entropy 2021, 23, 18. [Google Scholar] [CrossRef]
- Wells, L.; Bednarz, T. Explainable AI and reinforcement learning—A systematic review of current approaches and trends. Front. Artif. Intell. 2021, 4, 4–8. [Google Scholar] [CrossRef]
- Dutta, V.; Zielińska, T. An adversarial explainable artificial intelligence (XAI) based approach for action forecasting. J. Autom. Mob. Robot. Intell. Syst. 2021, 14, 3–10. [Google Scholar] [CrossRef]
- Choraś, M.; Pawlicki, M.; Puchalski, D.; Kozik, R. Machine learning–the results are not the only thing that matters! What about security, explainability and fairness? In Proceedings of the International Conference on Computational Science, Krakow, Poland, 16–18 June 2020; pp. 615–628. [Google Scholar]
- Fantin, S.; Pupillo, L.; Polito, C.; Ferreire, A. Artificial Intelligence and Cybersecurity, Technology, Governance and Policy Challenge; Final Report of a CEPS Task Force; CEPS-Centre for European Policy Studies: Brussels, Belgium, 2021; pp. 1–13. [Google Scholar]
- Dutta, V.; Choraś, M.; Kozik, R.; Pawlicki, M. Hybrid model for improving the classification effectiveness of network intrusion detection. In Proceedings of the International Conference on Complex, Intelligent, and Software Intensive Systems, Seville, Spain, 13–15 May 2020; pp. 405–414. [Google Scholar]
- Mineraud, J.; Mazhelis, O.; Su, X.; Tarkoma, S. A gap analysis of Internet-of-Things platforms. Comput. Commun. 2016, 89, 5–16. [Google Scholar] [CrossRef] [Green Version]
- Choraś, M.; Kozik, R. Machine learning techniques applied to detect cyber attacks on web applications. Log. J. IGPL 2015, 23, 45–56. [Google Scholar] [CrossRef]
- Dutta, V.; Choras, M.; Pawlicki, M.; Kozik, R. Detection of cyberattacks traces in IoT data. J. Univers. Comput. Sci. 2020, 26, 1422–1434. [Google Scholar] [CrossRef]
- Jain, A.; Verma, B.; Rana, J. Anomaly intrusion detection techniques: A brief review. Int. J. Sci. Eng. Res. 2014, 5, 1372–1383. [Google Scholar]
- Dutta, V.; Choraś, M. A deep learning ensemble for network anomaly and cyber-attack detection. Sensors 2020, 20, 4583. [Google Scholar] [CrossRef]
- Noura, H.N.; Melki, R.; Chehab, A.; Fernandez, J.H. Efficient and robust data availability solution for hybrid PLC/RF systems. Comput. Netw. 2021, 185, 107–123. [Google Scholar] [CrossRef]
- Chigan, C.; Li, L.; Ye, Y. Resource-aware self-adaptive security provisioning in mobile ad hoc networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; Volume 4, pp. 2118–2124. [Google Scholar]
- Finochietto, M.; Eggly, G.M.; Santos, R.; Orozco, J.; Ochoa, S.F.; Meseguer, R. A role-based software architecture to support mobile service computing in IoT scenarios. Sensors 2019, 19, 4801. [Google Scholar] [CrossRef] [Green Version]
- Mazzara, M. Deriving specifications of dependable systems: Toward a method. arXiv 2010, arXiv:1009.3911. [Google Scholar]
- Abouzaid, F.; Mazzara, M.; Mullins, J.; Qamar, N. Towards a formal analysis of dynamic reconfiguration in WS-BPEL. In Intelligent Decision Technologies; IOS Press: Amsterdam, The Netherlands, 2013; Volume 7, pp. 213–224. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Description |
|---|---|---|
| A | ISO 12100 [62] | Risk assessment & risk reduction |
| IEC 61508 [63] | Functional safety of electronic, programmable electronic | |
| B1 | ISO 13849-1 [64] | Safety related part of control systems |
| IEC 62061 [65] | Functional safety of electronic, programmable electronic | |
| B2 | ISO 13850 [66] | Emergency stop function - Principles for design |
| ISO 13851 [67] | Two-hand control devices | |
| C | ISO 10218 [68] | Safety requirements for industrial robots |
| ISO 10218-1,2 [68] | Safety requirements for robot (robot and controller). Describes the basic hazards manufacturers | |
| ISO TS 15066 [69] | Specifies safety requirements for collaborative industrial robot | |
| ISO 8373 (2012) [60] | Autonomy, physical alteration, multipurpose |
| Type of Robots | Application Area | Capabilities |
|---|---|---|
| Yumi—IRB 14000, ABB [78] | Electronics and small | Dual arm body, |
| parts assembly lines | Collision free for each arm | |
| U10, Universal Robots [79] | Packaging, assembly and | 6 DOF single arm robot, |
| pick, palletizing | collision detection | |
| LBR iiwa 14 R820, KUKA [80] | Measuring, fastening, | Single arm robot with 7 axis, |
| machine tending | contact detection | |
| Sawyer, Rethink Robotics [81] | Packaging, kitting, and | Context-based learning, |
| material handling | 7 DOF single arm robot |
| Applications | Implementation Area |
|---|---|
| Caregiver [92] | Facilitating services to elderly with the help of |
| information, movement of human body, fall detection | |
| Rehabilitation [93] | Support elderly to live independently, reduce |
| possibilities of re-hospitalizations | |
| Clinical Applications [94] | people with chronic diseases to take the |
| appropriate medications | |
| Motor Disorders [95] | Use of vision sensor & wearable sensors which |
| have high ability to detect gait changes | |
| Prevention Assessment [96] | Use of IoT devices in designing fall prevention |
| system for elderly | |
| Human Activity Recognition [97] | Monitoring the daily activities of human, |
| abnormal human activities, prevention of hazards | |
| Elderly Care Monitoring [98] | Monitoring health issues, ambient assisted living |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dutta, V.; Zielińska, T. Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology. Electronics 2021, 10, 2850. https://doi.org/10.3390/electronics10222850
Dutta V, Zielińska T. Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology. Electronics. 2021; 10(22):2850. https://doi.org/10.3390/electronics10222850
Chicago/Turabian StyleDutta, Vibekananda, and Teresa Zielińska. 2021. "Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology" Electronics 10, no. 22: 2850. https://doi.org/10.3390/electronics10222850
APA StyleDutta, V., & Zielińska, T. (2021). Cybersecurity of Robotic Systems: Leading Challenges and Robotic System Design Methodology. Electronics, 10(22), 2850. https://doi.org/10.3390/electronics10222850