
A Wavelet-Based Diagnostic Framework for CRD Engine Injection Systems under Emulsified Fuel Conditions



Abstract
:1. Introduction
2. Motivation and Literature Review on Related Works
- An investigative study was conducted on the CR system of a KIA Sorento 2004 diesel engine operating on varying W/D emulsion compositions and engine speeds. The effect and damage severity of W/D emulsion fuels on critical FIS components were explored, presented, and via a degradation/wear assessment, empirical judgements were made on the correlations between fuel conditions and engine performance.
- A DNN-based diagnostic scheme is proposed for condition monitoring which exploits the rail pressure sensor (RPS) signals by a wavelet-based signal processing technique. Against the poor efficacies of the raw RPS signals, their first-order differential provides standardized inputs for CWC extraction which provide discriminative inputs for DNN-based classification.
- Extensive descriptive and empirical conclusions are drawn. The research results are expected to provide a modern paradigm for condition monitoring, failure diagnostics, design, and decision-making for CRD engines with W/D emulsion fuels.
3. Background of Study
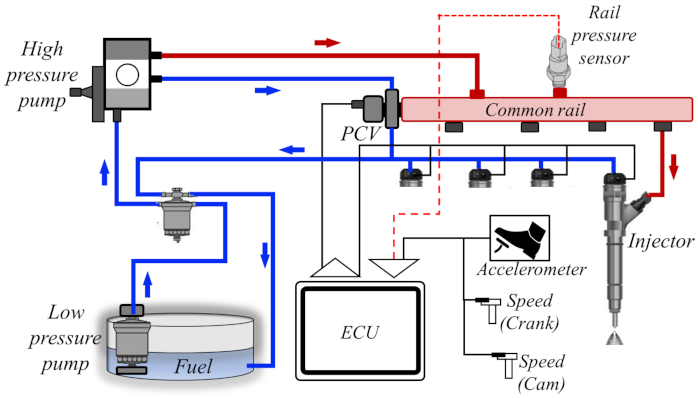
3.1. Common Rail Injection System
3.2. Test Engine and Fuels
3.3. Proposed Diagnostic Method
3.3.1. Diagnostic Feature Extraction and Selection
3.3.2. ML/DL-Based Diagnosis
3.3.3. FDI Performance Evaluation
4. Experimental Results
4.1. Signal Processing and Feature Extraction
4.2. ML/DL-Based Diagnosis
4.3. Diagnostic Performance Evaluation
4.4. Discussions and Drawn Insights
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Damage Severity Analysis on Injector Components



References
- Krogerus, T.; Huhtala, K. Diagnostics and Identification of Injection Duration of Common Rail Diesel Injectors. Open Eng. 2018, 8, 1–6. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, Q.; Chen, Z.; Zheng, Z.; Yang, C.; Ma, Q. The combustion and emission characteristics of diesel-ethanol blends with THF as cosolvents in a diesel engine operating with EGR. Fuel 2021, 298, 120834. [Google Scholar] [CrossRef]
- Krishnamoorthi, M.; Malayalamurthi, R. The influence of charge air temperature and exhaust gas recirculation on the availability analysis, performance and emission behavior of diesel-bael oil-diethyl ether blend operated diesel engine. J. Mech. Sci. Technol. 2018, 32, 1835–1847. [Google Scholar] [CrossRef]
- Kalghatgi, G.; Johansson, B. Gasoline compression ignition approach to efficient, clean and affordable future engines. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 118–138. [Google Scholar] [CrossRef]
- Senthur, N.S.; BalaMurugan, S.; RamGanesh, H.; Divakara, S. Experimental analysis on the perfor-mance, emission, and combustion characteristics of diesel, and diesel-water emulsions in low heat rejection engine. Mater. Today Proc. 2021, 39, 1351–1355. [Google Scholar] [CrossRef]
- Won, J.; Baek, S.W.; Kim, H.; Lee, H. The Viscosity and Combustion Characteristics of Single-Droplet Water-Diesel Emulsion. Energies 2019, 12, 1963. [Google Scholar] [CrossRef] [Green Version]
- Khatri, D.; Goyal, R. Performance, emission and combustion characteristics of water diesel emulsified fuel for diesel engine: A review. Mater. Today Proc. 2020, 28, 2275–2278. [Google Scholar] [CrossRef]
- Hussain, V.R.; Marouf, W.M. Optimal utilization of ZnO nanoparticles blended diesel-water emulsion by varying compression ratio of a VCR diesel engine. J. Environ. Chem. Eng. 2020, 2020, 103884. [Google Scholar] [CrossRef]
- Hossain, F.M.; Nabi, M.N.; Rahman, M.M.; Bari, S.; Van, T.C.; Rahman, S.M.A.; Rainey, T.J.; Bodisco, T.A.; Suara, K.; Ristovski, Z.; et al. Experimental Investigation of Diesel Engine Performance, Combustion and Emissions Using a Novel Series of Dioctyl Phthalate (DOP) Biofuels Derived from Microalgae. Energies 2019, 12, 1964. [Google Scholar] [CrossRef] [Green Version]
- Avulapati, M.M.; Megaritis, T.; Xia, J.; Ganippa, L. Experimental understanding on the dynamics of micro-explosion and puffing in ternary emulsion droplets. Fuel 2019, 239, 1284–1292. [Google Scholar] [CrossRef]
- Song, E.; Ke, Y.; Yao, C.; Dong, Q.; Yang, L. Fault Diagnosis Method for High-Pressure Common Rail Injector Based on IFOA-VMD and Hierarchical Dispersion Entropy. Entropy 2019, 21, 923. [Google Scholar] [CrossRef] [Green Version]
- Akpudo, U.E.; Hur, J.W. Towards bearing failure prognostics: A practical comparison between data-driven methods for industrial applications. J. Mech. Sci. Technol. 2020, 34, 4161–4172. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J.W. A feature fusion-based prognostics approach for rolling element bearings. J. Mech. Sci. Technol. 2020, 34, 4025–4035. [Google Scholar] [CrossRef]
- Nixon, S.; Weichel, R.; Reichard, K.; Kozlowski, J. A Machine Learning Approach to Diesel Engine Health Prognostics using Engine Controller Data. In Proceedings of the 10th Annual Conference of the Prognostics and Health Management Society, Philadelphia, PA, USA, 24–27 Septmber 2018; Volume 10. [Google Scholar] [CrossRef]
- Akpudo, U.; Jang-Wook, H. A Multi-Domain Diagnostics Approach for Solenoid Pumps Based on Discriminative Features. IEEE Access 2020, 8, 175020–175034. [Google Scholar] [CrossRef]
- Visalakshi, S.; Radha, V. A literature review of feature selection techniques and applications: Review of feature selection in data mining. In Proceedings of the the 2014 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2014; pp. 1–6. [Google Scholar]
- Syu, J.Y.; Chang, Y.Y.; Tseng, C.H.; Yan, Y.L.; Chang, Y.M.; Chen, C.C.; Lin, W.Y. Effects of water-emulsified fuel on a diesel engine generator’s thermal efficiency and exhaust. J. Air Waste Manag. Assoc. 2014, 64, 970–978. [Google Scholar] [CrossRef] [Green Version]
- Senthur, N.S.; Jose, V.J.; Mahesh, K.M.; Esakki, R.M. Relative assessment of performance and emission characteristics of various biodiesel water emulsion blends in DI diesel engine. Mater. Today Proc. 2021, 45, 967–973. [Google Scholar] [CrossRef]
- Fahd, M.E.A.; Wenming, Y.; Lee, P.S.; Chou, S.K.; Yap, C.R. Experimental investigation of the performance and emission characteristics of direct injection diesel engine by water emulsion diesel under varying engine load condition. Appl. Energy 2013, 102, 1042–1049. [Google Scholar] [CrossRef]
- Kim, M.; Oh, J.; Lee, C. Study on Combustion and Emission Characteristics of Marine Diesel Oil and Water-In-Oil Emulsified Marine Diesel Oil. Energies 2018, 11, 1830. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.-S.; Akpudo, U.E.; Hur, J.-W. A Study on Water-Induced Damage Severity on Diesel Engine Injection System Using Emulsified Diesel Fuels. Electronics 2021, 10, 2285. [Google Scholar] [CrossRef]
- Patidar, S.K.; Raheman, H. Performance and durability analysis of a single-cylinder direct injection diesel engine operated with water emulsified biodiesel-diesel fuel blend. Fuel 2020, 273, 117779. [Google Scholar] [CrossRef]
- Turner, J.; Popplewell, A.; Patel, R.; Johnson, T.; Darnton, N.J.; Richardson, S.; Bredda, S.W.; Tudor, R.J.; Bithell, C.I.; Jackson, R.; et al. Ultra Boost for Economy: Extending the Limits of Extreme Engine Downsizing. SAE Int. J. Engines 2014, 7, 387–417. [Google Scholar] [CrossRef]
- Serrano, J.R.; Novella, R.; Piqueras, P. Why the Development of Internal Combustion Engines Is Still Necessary to Fight against Global Climate Change from the Perspective of Transportation. Appl. Sci. 2019, 9, 4597. [Google Scholar] [CrossRef] [Green Version]
- Beatrice, C.; Di Blasio, G.; Belgiorno, G. Experimental analysis of functional requirements to exceed the 100kW/l in high-speed light-duty diesel engines. Fuel 2017, 207, 591–601. [Google Scholar] [CrossRef]
- Di Blasio, G.; Beatrice, C.; Belgiorno, G.; Pesce, F.C.; Vassallo, A. Functional Requirements to Exceed the 100 kW/l Milestone for High Power Density Automotive Diesel Engines. SAE Int. J. Engines 2017, 10, 2342–2353. [Google Scholar] [CrossRef]
- Vassallo, A.; Beatrice, C.; Di Blasio, G.; Belgiorno, G.; Avolio, G.; Pesce, F.C. The Key Role of Advanced, Flexible Fuel Injection Systems to Match the Future CO2 Targets in an Ultra-Light Mid-Size Diesel Engine; SAE Technical Paper; SAE International: Washington, DC, USA, 2018; ISSN 0148-7191. [Google Scholar] [CrossRef]
- Wróblewski, A.; Langer, A.; Szczyglak, P.; Rekuć, A. The Influence of Added Water on Fuel Injector Wear in a Diesel Engine. Tribologia 2018, 3, 153–158. [Google Scholar] [CrossRef]
- Nour, M.; Kosaka, H.; Ali, K.; Abdel-Rahman; Bady, M. Effect of Water Injection into Exhaust Manifold on Diesel Engine Combustion and Emissions. Energy Procedia 2016, 100, 178–187. [Google Scholar] [CrossRef] [Green Version]
- Suresh, V.; Amirthagadeswaran, K.S. The role of water-in-diesel emulsion and its additives on diesel engine performance and emission levels: A retrospective review. Alex. Eng. J. 2016, 55, 2463–2472. [Google Scholar] [CrossRef] [Green Version]
- Shyam, P.H.; Gonsalvis, J.; Vijay, V.S. Effect of Introduction of Water into Combustion Chamber of Diesel Engines—A Review. Energy Power 2015, 5, 28–33. [Google Scholar] [CrossRef]
- Kim, S.; Akpudo, U.E.; Hur, J.-W. A Cost-Aware DNN-Based FDI Technology for Solenoid Pumps. Electronics 2021, 10, 2323. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J.-W. D-dCNN: A Novel Hybrid Deep Learning-Based Tool for Vibration-Based Diagnostics. Energies 2021, 14, 5286. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J.-W. A CEEMDAN-Assisted Deep Learning Model for the RUL Estimation of Solenoid Pumps. Electronics 2021, 10, 2054. [Google Scholar] [CrossRef]
- Chen, X.; Yang, Y.; Cui, Z.; Shen, J. Wavelet Denoising for the Vibration Signals of Wind Turbines Based on Variational Mode Decomposition and Multiscale Permutation Entropy. IEEE Access 2020, 8, 40347–40356. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J. A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps. Electronics 2021, 10, 439. [Google Scholar] [CrossRef]
- Han, T.; Jiang, D.; Zhao, Q.; Wang, L.; Yin, K. Comparison of random forest, artificial neural networks and support vector machine for intelligent diagnosis of rotating machinery. Trans. Inst. Meas. Control 2018, 40, 2681–2693. [Google Scholar] [CrossRef]
- Khaire, U.M.; Dhanalakshmi, R. Stability of feature selection algorithm: A review. J. King Saud Univ.-Comput. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Lai, K.K.; Mishra, S.K.; Ram, B. On q-Quasi-Newton’s Method for Unconstrained Multiobjective Optimization Problems. Mathematics 2020, 8, 616. [Google Scholar] [CrossRef] [Green Version]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2015, arXiv:1412.6980v9. [Google Scholar]
- Oh, S.H. Improving the Water Level Prediction of Multi-Layer Perceptron with a Modified Error Function. Int. J. Contents 2018, 13, 23–28. [Google Scholar] [CrossRef]
- Bircanoğlu, C.; Arıca, N. A comparison of activation functions in artificial neural networks. In Proceedings of the 2018 26th Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Chatzimichail, T.; Hatjimihail, A.T. A Software Tool for Calculating the Uncertainty of Diagnostic Accuracy Measures. Diagnostics 2021, 11, 406. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Car Model | Engine Type | Bore × Stroke (mm) | Maximum Power | Maximum Torque (Nm/RPM) | Compression Ratio | Fuel Injection | Aspiration |
|---|---|---|---|---|---|---|---|
| KIA Sorento 2004 | In-line, Four (4) | 91 × 96 | 138 hp @ 3800 RPM | 343 Nm @ 1900 RPM | 17.6 | Common Rail | Turbocharged, inter-cooled |
| Algorithm | Dependent Parameter | Grid Search Space | Best Grid Values |
|---|---|---|---|
| RF | Estimators (n) Maximum depth (m) | n = {10, 20, …200} m = {10, 20, …100} | n = 120 m = 30 |
| Logistic regression (LR) | Regularization strength inverse (C) | C = {0.001, 0.01, 0.1, 1, 10, 100, 1000} | C = 10 |
| GBC | Estimators (n) Maximum depth (m) Learning rate () | n = {100, 200, …1000} m = {10, 20, …100} = {0.0001, 0.001, 0.01, 0.05} | n = 500 m = 30 = 0.001 |
| Linear SVM (SVM-Lin) | Regularization (C) | C = {1, 10, 100, 1000} | C = 100 |
| Gaussian-kernel SVM (SVM–RBF) | Regularization (C) Kernel coefficient () | C = {1, 10, 100, 1000} = {1, 10, 100, 1000} | C = 100 = 10 |
| Adaboost classifier (ABC) | Estimators (n) Maximum depth (m) Learning rate () | n = {100, 200, …1000} m = {10, 20, …100} = {0.0001, 0.001, 0.01, 0.05} | n = 200 m = 20 = 0.01 |
| Gaussian process classifier (GPC) | Kernel (K) | K = RBF | K = RBF |
| DT | Maximum depth (m) Pruning (p) | m = {10, 20, …100} p = {2, 4, 6, 8, 10, 12} | m = 50 p = 12 |
| KNN | Number of neighbours (k) Weight function (w) | k = {1, 2, 3, …100} w = {uniform, distance} | k = 5 w = uniform |
| MLP classifier | Number of Layers (h) Number of nodes (a) Activation function (f) Learning rate () | h = 1 a = {70, 35, 14, 7, 1} f = {Tanh, ReLU, Logistic, Sigmoid} = {0.0001, 0.001, 0.01, 0.05} | a = 7 f = ReLU = 0.001 |
| DNN classifier | Number of Layers (h) Number of nodes (a) Activation function (f) Learning rate () | h = {2,3} a = {(70,35,14), (70,14,35), (35,70,14), (35,14,70), (70,35), (35,70), (70,14), (14,70), (35,14), (14,35)} f = {Tanh, ReLU, Logistic, Sigmoid} = {0.0001, 0.001, 0.01, 0.05} | h = 3 a = (35,70,14) f = ReLU = 0.001 |
| Naive Bayes classifier (NBC) | Gaussian | – | – |
| Quadratic discriminant analysis (QDA) | Regularization strength inverse (C) | C = {0.001, 0.01, 0.1, 1, 10, 100, 1000} | C = 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akpudo, U.E.; Hur, J.-W. A Wavelet-Based Diagnostic Framework for CRD Engine Injection Systems under Emulsified Fuel Conditions. Electronics 2021, 10, 2922. https://doi.org/10.3390/electronics10232922
Akpudo UE, Hur J-W. A Wavelet-Based Diagnostic Framework for CRD Engine Injection Systems under Emulsified Fuel Conditions. Electronics. 2021; 10(23):2922. https://doi.org/10.3390/electronics10232922
Chicago/Turabian StyleAkpudo, Ugochukwu Ejike, and Jang-Wook Hur. 2021. "A Wavelet-Based Diagnostic Framework for CRD Engine Injection Systems under Emulsified Fuel Conditions" Electronics 10, no. 23: 2922. https://doi.org/10.3390/electronics10232922