
Robust Partial Feedback Linearized Controller Design for Standalone Hybrid PV-BES System


Abstract
:1. Introduction
- Developed a parametric uncertainty model of a normalized mathematical model of the DC-DC voltage source converters.
- Investigated the noise decoupling capability of the feedback linearizing approach.
- The performance of the robust partial feedback linearized controller was investigated under load, measurement noise, and parameter variations.
2. Overview on Mathematical Model of Hybrid PV-BES System
2.1. Mathematical Model of the Solar Photovoltaic System
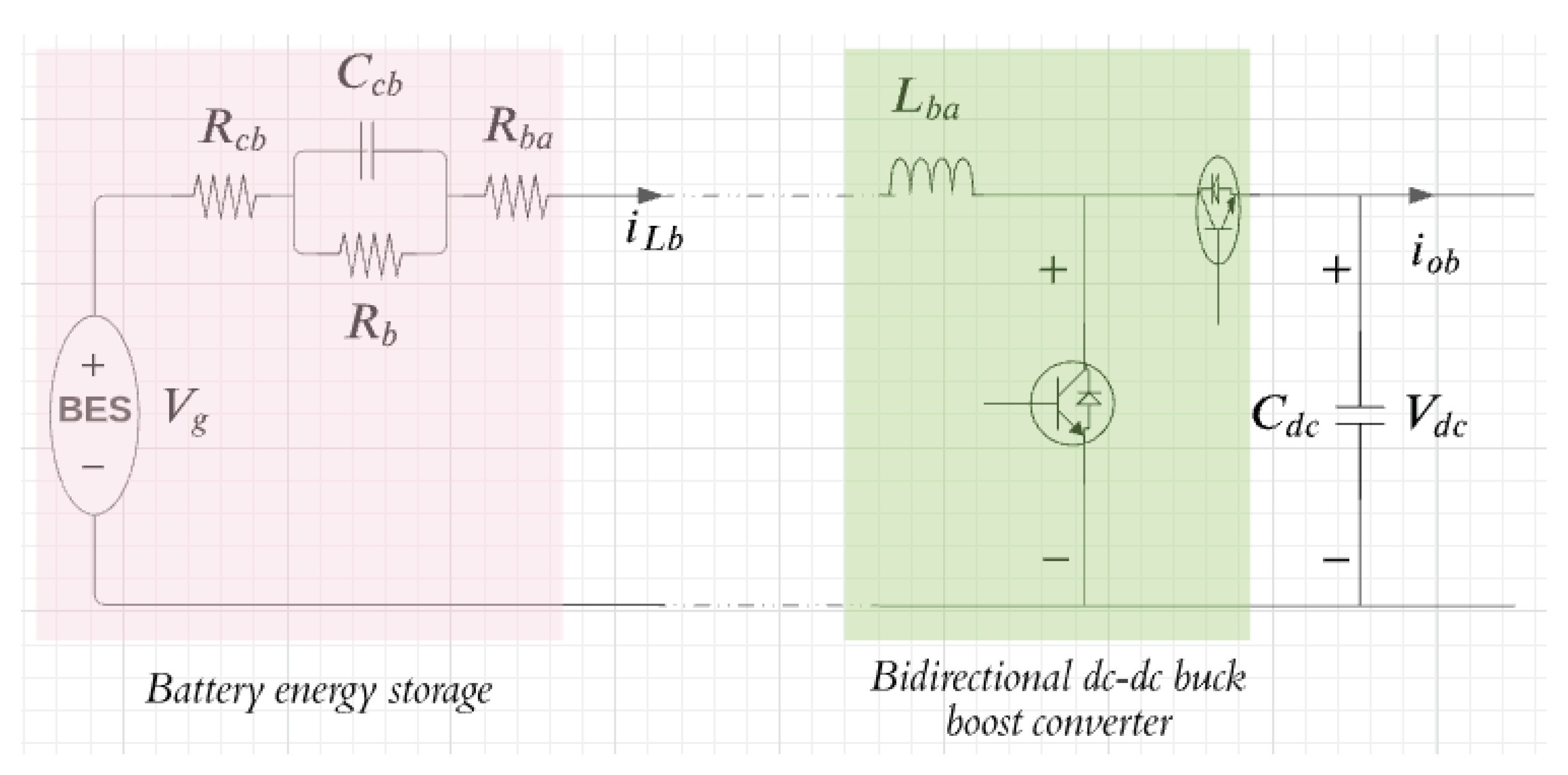
2.2. Mathematical Model of the Battery Energy Storage System
Generalized Dynamical Model of Photovoltaic and Battery Energy Storage System
3. Partial Feedback Linearized Control Scheme for Standalone PV-BES System
3.1. Determine Relative Degree
3.2. Nonlinear Coordinate Transformation of Linearized System
3.3. Zero Internal Dynamic Stability
3.4. Feedback Linearized Control Law Formulation
3.5. Transfer Function of Linearized System
4. Robust Controller Design for Partially Linearized Standalone PV-BES System
4.1. Uncertainty Modeling
4.2. Noise Decoupling Capability of Designed Partial Feedback Linearized Controller
4.3. Mixed-Sensitivity-Based Robust Loop-Shaping Controller Design
5. Performance Evaluation of Standalone PV-BES System
5.1. Proposed Controller Performance Investigation under Generation Change
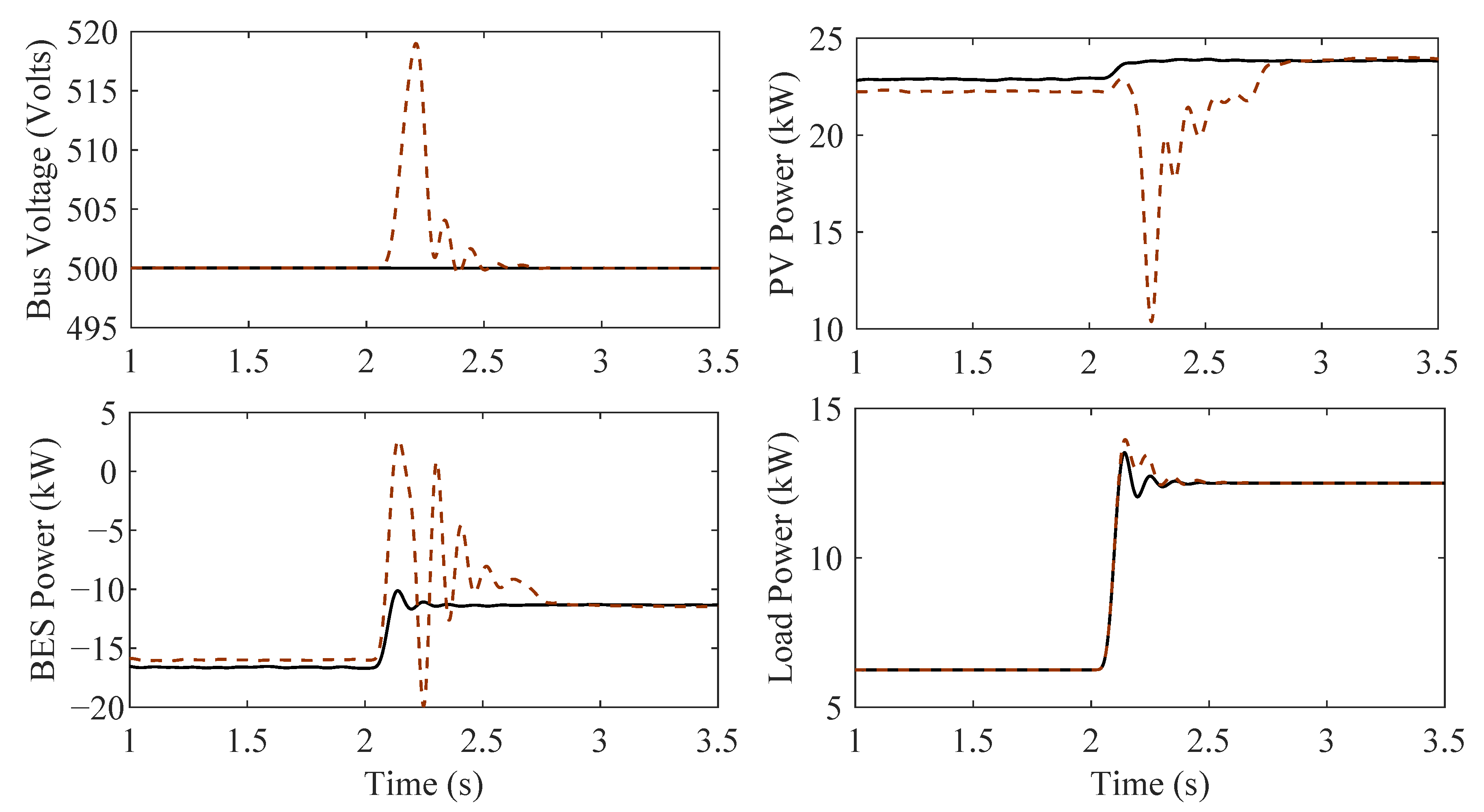
5.2. Proposed Controller Performance Investigation under Load Variation
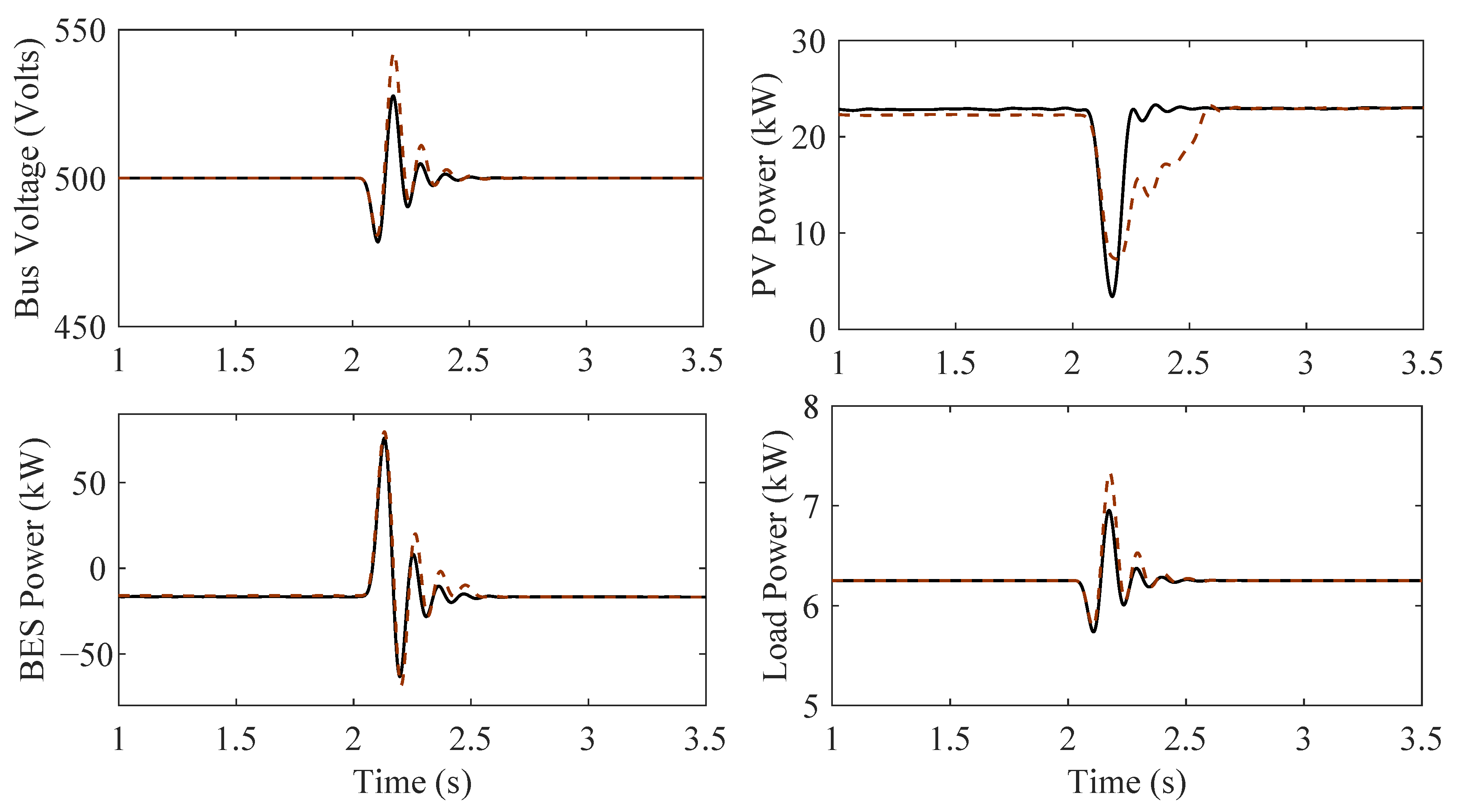
5.3. Proposed Controller Performance Investigation under Parameter Variation
5.4. Proposed Controller Performance Investigation under Measurement Noise
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Salah, W.A.; Abuhelwa, M.; Bashir, M.J. The key role of sustainable renewable energy technologies in facing shortage of energy supplies in Palestine: Current practice and future potential. J. Clean. Prod. 2020, 293, 125348. [Google Scholar] [CrossRef]
- Javed, K.; Ashfaq, H.; Singh, R.; Hussain, S.; Ustun, T.S. Design and performance analysis of a stand-alone PV system with hybrid energy storage for rural India. Electronics 2019, 8, 952. [Google Scholar] [CrossRef] [Green Version]
- Lohmann, G.M. Irradiance variability quantification and small-scale averaging in space and time: A short review. Atmosphere 2018, 9, 264. [Google Scholar] [CrossRef] [Green Version]
- Döşoğlu, M.K.; Arsoy, A.B. Transient modeling and analysis of a DFIG based wind farm with supercapacitor energy storage. Int. J. Electr. Power Energy Syst. 2016, 78, 414–421. [Google Scholar] [CrossRef]
- Ma, T.; Yang, H.; Lu, L. Development of hybrid battery–supercapacitor energy storage for remote area renewable energy systems. Appl. Energy 2015, 153, 56–62. [Google Scholar] [CrossRef]
- Rajshree, B.; Manan, S. Solar photovoltaic energy in India: Business feasibility study and analogy of policies. Int. J. Energy Water Resour. 2021, 1–12. [Google Scholar] [CrossRef]
- Takruri, M.; Farhat, M.; Barambones, O.; Ramos-Hernanz, J.A.; Turkieh, M.J.; Badawi, M.; AlZoubi, H.; Abdus Sakur, M. Maximum Power Point Tracking of PV System Based on Machine Learning. Energies 2020, 13, 692. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.S.; Locatelli, G.; Pimm, A.; Wu, X.; Lai, L.L. A review on long-term electrical power system modeling with energy storage. J. Clean. Prod. 2020, 280, 124298. [Google Scholar] [CrossRef]
- Saadeh, O.; Rabady, R.; Melhem, M.B. New effective PV battery charging algorithms. Sol. Energy 2018, 166, 509–518. [Google Scholar] [CrossRef]
- Weniger, J.; Tjaden, T.; Bergner, J.; Quaschning, V. Dynamic mismatch losses of grid-connected PV-battery systems in residential buildings. J. Energy Storage 2017, 13, 244–254. [Google Scholar] [CrossRef]
- El-Shahat, A.; Sumaiya, S. DC-Microgrid System Design, Control, and Analysis. Electronics 2019, 8, 124. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, Y.A.R.I.; El-Saadany, E.F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Diaz, N.L.; Dragičević, T.; Vasquez, J.C.; Guerrero, J.M. Intelligent distributed generation and storage units for DC microgrids—A new concept on cooperative control without communications beyond droop control. IEEE Trans. Smart Grid 2014, 5, 2476–2485. [Google Scholar] [CrossRef] [Green Version]
- Ray, P.K.; Das, S.R.; Mohanty, A. Fuzzy-controller-designed-PV-based custom power device for power quality enhancement. IEEE Trans. Energy Convers. 2018, 34, 405–414. [Google Scholar] [CrossRef]
- Sahoo, S.; Mishra, S.; Jha, S.; Singh, B. A cooperative adaptive droop based energy management and optimal voltage regulation scheme for DC microgrids. IEEE Trans. Ind. Electron. 2019, 67, 2894–2904. [Google Scholar] [CrossRef]
- Behjati, H.; Davoudi, A.; Lewis, F. Modular DC–DC converters on graphs: Cooperative control. IEEE Trans. Power Electron. 2014, 29, 6725–6741. [Google Scholar] [CrossRef]
- Yang, J.; Jin, X.; Wu, X.; Acuna, P.; Aguilera, R.P.; Morstyn, T.; Agelidis, V.G. Decentralised control method for DC microgrids with improved current sharing accuracy. IET Gener. Transm. Distrib. 2017, 11, 696–706. [Google Scholar] [CrossRef]
- Tah, A.; Das, D. An enhanced droop control method for accurate load sharing and voltage improvement of isolated and interconnected DC microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1194–1204. [Google Scholar] [CrossRef]
- Tahim, A.P.; Pagano, D.J.; Ponce, E. Nonlinear control of dc-dc bidirectional converters in stand-alone dc microgrids. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3068–3073. [Google Scholar]
- Ohirul Qays, M.; Buswig, Y.; Hossain, M.L.; Abu-Siada, A. Active Charge Balancing Strategy Using the State of Charge Estimation Technique for a PV-Battery Hybrid System. Energies 2020, 13, 3434. [Google Scholar] [CrossRef]
- Ko, S.T.; Park, S.S.; Lee, J.H. Regenerative Battery Charging Control Method for PMSM Drive without a DC/DC Converter. Electronics 2019, 8, 1126. [Google Scholar] [CrossRef] [Green Version]
- Roy, T.K.; Mahmud, M.A.; Oo, A.M.T.; Haque, M.E.; Muttaqi, K.M.; Mendis, N. Nonlinear adaptive backstepping controller design for islanded DC microgrids. IEEE Trans. Ind. Appl. 2018, 54, 2857–2873. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Avila-Rea, C.A.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Silva-Ortigoza, G.; Taud, H.; Marcelino-Aranda, M. Robust tracking controller for a DC/DC Buck-Boost converter–inverter–DC motor system. Energies 2018, 11, 2500. [Google Scholar] [CrossRef] [Green Version]
- Mahmud, M.R. Novel Robust Controller Design to Enhance Transient Stability of Power Systems. Master’s Thesis, Swinburne University of Technology, Hawthorn, Australia, 2017. [Google Scholar]
- Mahmud, M.; Pota, H. Robustness analysis of h∞ controller for feedback linearized model of grid connected inverter. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Madras, India, 18–21 December 2018; pp. 1–6. [Google Scholar]
- Mahmud, R.; Hossain, M.A.; Pota, H. Robust Nonlinear Controller Design for Islanded Photovoltaic System with Battery Energy Storage. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Mahmud, M.A.; Roy, T.K.; Islam, S.N.; Saha, S.; Haque, M.E. Nonlinear decentralized feedback linearizing controller design for islanded dc microgrids. Electr. Power Compon. Syst. 2017, 45, 1747–1761. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Roy, T.K.; Saha, S.; Haque, M.E.; Pota, H.R. Robust nonlinear adaptive feedback linearizing decentralized controller design for islanded dc microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5343–5352. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Norm Values |
|---|---|
| (42-a) | |
| (42-b) | |
| (42-c) | |
| (42-d) | |
| (42-e) |
| Comparative Issues | Controller | Bus Voltage | PV Power | Storage Power | Load Power |
|---|---|---|---|---|---|
| Under or overshoot (%) | 0.00 | 0.00 | 0.00 | 0.00 | |
| 2.60 | 33.0 | 35.0 | 4.80 | ||
| Settling time (s) | 0.00 | 0.00 | 0.00 | 0.00 | |
| 0.30 | 0.40 | 0.40 | 0.30 |
| Comparative Issues | Controller | Bus Voltage | PV Power | Storage Power | Load Power |
|---|---|---|---|---|---|
| Under or overshoot (%) | 0.00 | 0.00 | 0.00 | 8.00 | |
| 4.00 | 52.0 | 67.0 | 12.0 | ||
| Settling time (s) | 0.00 | 0.00 | 0.00 | 0.20 | |
| 0.25 | 0.70 | 0.70 | 0.25 |
| Comparative Issues | Controller | Bus Voltage | PV Power | Storage Power | Load Power |
|---|---|---|---|---|---|
| Under or overshoot (%) | 5.00 | 85.0 | 350 | 16.0 | |
| 8.00 | 69.0 | 360 | 24.0 | ||
| Settling time (s) | 0.25 | 0.30 | 0.30 | 0.30 | |
| 0.3 | 0.50 | 0.40 | 0.40 |
| Comparative Issues | Controller | Bus Voltage | PV Power | Storage Power | Load Power |
|---|---|---|---|---|---|
| Under or overshoot (%) | 1.00 | 43.0 | 94.0 | 48.0 | |
| 3.00 | 35.0 | 131 | 13.0 | ||
| Settling time (s) | 0.20 | 0.30 | 0.35 | 0.30 | |
| 0.2 | 0.45 | 0.50 | 0.30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmud, M.R.; Pota, H. Robust Partial Feedback Linearized Controller Design for Standalone Hybrid PV-BES System. Electronics 2021, 10, 772. https://doi.org/10.3390/electronics10070772
Mahmud MR, Pota H. Robust Partial Feedback Linearized Controller Design for Standalone Hybrid PV-BES System. Electronics. 2021; 10(7):772. https://doi.org/10.3390/electronics10070772
Chicago/Turabian StyleMahmud, Md Rasel, and Hemanshu Pota. 2021. "Robust Partial Feedback Linearized Controller Design for Standalone Hybrid PV-BES System" Electronics 10, no. 7: 772. https://doi.org/10.3390/electronics10070772