
Optimal Tuning of Fractional Order Controllers for Dual Active Bridge-Based DC Microgrid Including Voltage Stability Assessment


Abstract
:1. Introduction
2. Literature Review
2.1. Application of FO-PI Controllers
2.2. Tuning of FO-PI Controllers
3. Comparison between FO and Conventional PID Controllers
3.1. Conventional PID Controllers
3.2. FO PID Controllers
4. Test System
4.1. Block Diagram
4.2. Detailed Test System
4.3. Test System Components
4.3.1. Main Grid and Three-Phase Rectifier
4.3.2. Main Grid and Three-Phase Rectifier
4.4. Problem Formulation
5. Implemented Evolutionary Search Algorithms
5.1. Particle Swarm Optimization
5.2. Simulated Annealing
5.3. Genetic Algorithm
6. Stability Analysis of the DAB-Based DC Microgrid
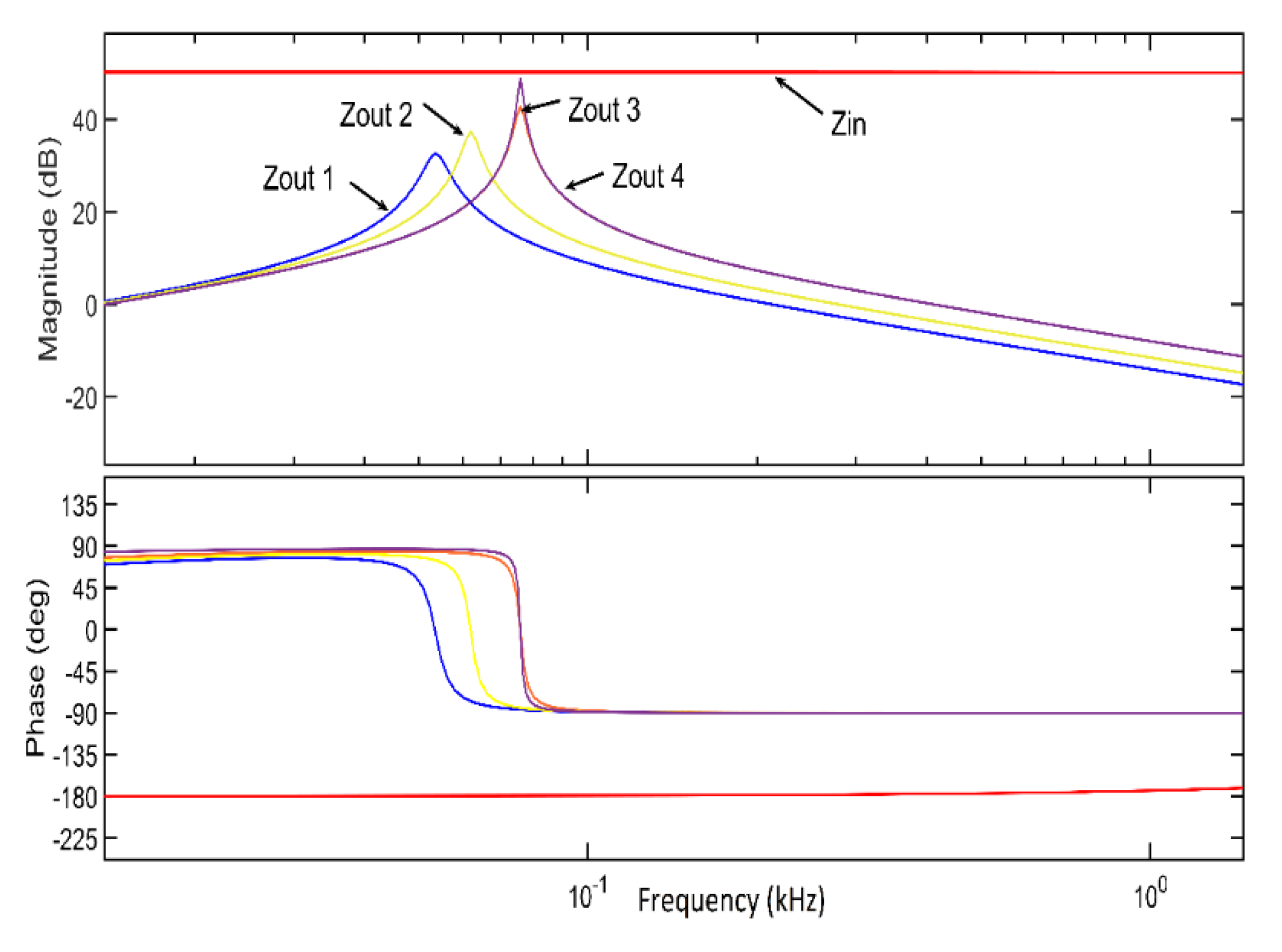
6.1. Stability Criteria and Impedance Modelling
6.2. Discussion of the Stability Analysis
7. Simulation Results
7.1. Simulation Parameters
7.2. Loading Conditions and Testing Scenarios
7.3. System Response Considering a Resistive Load
7.4. System Response Considering a Constant Power Load
7.5. Response with Single-Phase Inverters
7.5.1. Square-Wave Single-Phase Inverter
7.5.2. SPWM Single-Phase Inverter
7.6. Results of the Optimization Process
7.7. Impact of Parameters Uncertainty on the DC Bus Voltage
8. Comparison with Other Existing Techniques
- In the available literature, several recent articles have used evolutionary algorithms to obtain optimal parameters in many applications, see [42,43,44,45,46,47,48]. However, any of them has been used to tune FO-PI controllers for voltage stability purposes in DC microgrids. Moreover, most of them have only used one algorithm. On the contrary, in the present paper, a comparison between three different algorithms is provided.
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CPL | Constant power load |
| DAB | Dual Active Bridge |
| DC | Direct Current |
| ESR | Equivalent series resistance of inductor Lk |
| FO | Fractional Order |
| GA | Genetic Algorithm |
| HFL | High Frequency Link |
| PSO | Particle Swarm Optimization |
| SA | Simulated Annealing |
| SPSM | Single Phase Shift Modulation |
| PF | Power Factor |
| PID | Proportional Integral Derivative Controller |
| PI | Proportional Integral Controller |
| PV | Photovoltaic |
| VSI | Voltage Source Inverter |
| 1-ϕ | Single Phase |
| TPS | Triple Phase Shift |
Nomenclatures
| Lk | Leakage inductance of inductor |
| Rk | ESR of inductor Lk |
| Kp | Proportional gain of conventional PID controller |
| Ki | Integral gain of conventional PID controller |
| Kd | Differentiator gain of conventional PID controller |
| e (t) | Error signal between reference and actual signals |
| u(t) | Output of PID controller |
| Kp1 | Gain of proportional term of FO-voltage controller |
| Ki1 | Gain of integral term of FO-voltage controller |
| λ1 | Order of integral term of FO-voltage controller |
| Kp2 | Gain of proportional term of FO-current controller |
| Ki2 | Gain of integral term of FO-current controller |
| λ2 | Order of integral term of FO-current controller |
| ϕ | Phase shift |
| d | Phase shift ratio |
| Po | Average output power of DAB converter |
| fs | Inverter switching frequency |
| Transfer function of conventional PID controller | |
| Transfer function of fractional order controller | |
| T | Temperature parameter of SA algorithm |
| VDC | DC bus voltage |
| vp | Primary voltage of HF transformer |
| vS | Secondary voltage of HF transformer |
| n | Turns ratio of HF Transformer |
| J | Objective function of evolutionary algorithm |
| JPSO | Objective function of PSO algorithm |
| JSA | Objective function of SA algorithm |
| JGA | Objective function of GA algorithm |
| w | Inertia weight of PSO algorithm |
| , | random numbers |
| k | Iteration number k of the PSO algorithm |
| i | Particle number i of the PSO algorithm |
| G | Global best position found by all particles |
| L | Local (Particle) best position |
| LS | Inductance of the AC link inductor |
| RS | Equivalent resistance of the AC link inductor |
| Velocity of the particle i at iteration k | |
| n,c | Neighborhood and current solutions in SA |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| PC capability | |
| Processor | Intel core i3 CPU 1.7 GHz |
| Ram | 8 GB |
| Simulation Platform | Matlab R2014a PSIM® Professional version 9.0.3 |
| AC Grid | 3-Phase AC Grid |
| Grid line voltage | 380 V/50 HZ |
| DC impedance | RDC = 0.35 Ω and LDC = 6 mH |
| DAB Inductor | |
| Leakage inductor (Lk) | 170 μH |
| ESR of Lk (Rk) | 0.2 Ω |
| HFL Transformer | |
| Turns ratio | 2:1 (step down) |
| DC Bus | |
| Rated Voltage | 200 V |
| Inverter Power Device | |
| Type | IGBT Branch Module |
| Rating | 1200 V/75 A |
| Filter Capacitors | |
| Input Capacitor C1 | 400 μF |
| Output Capacitor C2 | 400 μF |
| Simulation sampling time | 10 μs |
| DAB switching frequency | 25 kHz |
References
- Hou, N.; Li, Y.W. Overview and Comparison of Modulation and Control Strategies for a Nonresonant Single-Phase Dual-Active-Bridge DC–DC Converter. IEEE Trans. Power Electron. 2020, 35, 3148–3172. [Google Scholar] [CrossRef]
- Sun, X.; Wang, H.; Qi, L.; Liu, F. Research on Single-Stage High-Frequency-Link SST Topology and Its Optimization Control. IEEE Trans. Power Electron. 2020, 35, 8701–8711. [Google Scholar] [CrossRef]
- Xia, P.; Shi, H.; Wen, H.; Bu, Q.; Hu, Y.; Yang, Y. Robust LMI-LQR Control for Dual-Active-Bridge DC–DC Converters with High Parameter Uncertainties. IEEE Trans. Transp. Electrif. 2020, 6, 131–145. [Google Scholar] [CrossRef]
- Liu, P.; Duan, S. A Hybrid Modulation Strategy Providing Lower Inductor Current for the DAB Converter with the Aid of DC Blocking Capacitors. IEEE Trans. Power Electron. 2019, 35, 4309–4320. [Google Scholar] [CrossRef]
- Hou, N.; Song, W.; Li, Y.W.; Zhu, Y.; Zhu, Y. A Comprehensive Optimization Control of Dual-Active-Bridge DC–DC Converters Based on Unified-Phase-Shift and Power-Balancing Scheme. IEEE Trans. Power Electron. 2018, 34, 826–839. [Google Scholar] [CrossRef]
- Hebala, O.M.; Aboushady, A.A.; Ahmed, K.H.; Abdelsalam, I.A. Generic Closed-Loop Controller for Power Regulation in Dual Active Bridge DC–DC Converter with Current Stress Minimization. IEEE Trans. Ind. Electron. 2019, 66, 4468–4478. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Qian, W.; Janabi, A.; Wang, B.; Lu, X.; Zou, K.; Chen, C.; Peng, F.Z. A Simple Phase-Shift Modulation Using Parabolic Carrier for Dual Active Bridge DC–DC Converter. IEEE Trans. Power Electron. 2020, 35, 7729–7734. [Google Scholar] [CrossRef]
- Voss, J.; Engel, S.P.; De Doncker, R.W. Control Method for Avoiding Transformer Saturation in High-Power Three-Phase Dual-Active Bridge DC–DC Converters. IEEE Trans. Power Electron. 2020, 35, 4332–4341. [Google Scholar] [CrossRef]
- Kwak, B.; Kim, M.; Kim, J. Inrush current reduction technology of DAB converter for low-voltage battery systems and DC bus connections in DC microgrids. IET Power Electron. 2020, 13, 1528–1536. [Google Scholar] [CrossRef]
- Chen, L.; Shao, S.; Xiao, Q.; Tarisciotti, L.; Wheeler, P.W.; Dragicevic, T. Model Predictive Control for Dual-Active-Bridge Converters Supplying Pulsed Power Loads in Naval DC Micro-Grids. IEEE Trans. Power Electron. 2020, 35, 1957–1966. [Google Scholar] [CrossRef]
- An, F.; Song, W.; Yu, B.; Yang, K. Model Predictive Control with Power Self-Balancing of the Output Parallel DAB DC–DC Converters in Power Electronic Traction Transformer. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1806–1818. [Google Scholar] [CrossRef]
- An, F.; Song, W.; Yang, K. Direct power control of dual-active-bridge dc–dc converters based on unified phase shift control. J. Eng. 2019, 2019, 2180–2184. [Google Scholar] [CrossRef]
- Song, W.; Hou, N.; Wu, M. Virtual Direct Power Control Scheme of Dual Active Bridge DC–DC Converters for Fast Dynamic Response. IEEE Trans. Power Electron. 2018, 33, 1750–1759. [Google Scholar] [CrossRef]
- Shan, Z.; Jatskevich, J.; Iu, H.H.-C.; Fernando, T. Simplified Load-Feedforward Control Design for Dual-Active-Bridge Converters with Current-Mode Modulation. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2073–2085. [Google Scholar] [CrossRef]
- Wang, D.; Nahid-Mobarakeh, B.; Emadi, A. Second Harmonic Current Reduction for a Battery-Driven Grid Interface with Three-Phase Dual Active Bridge DC–DC Converter. IEEE Trans. Ind. Electron. 2019, 66, 9056–9064. [Google Scholar] [CrossRef]
- Zengin, S.; Boztepe, M. A Novel Current Modulation Method to Eliminate Low-Frequency Harmonics in Single-Stage Dual Active Bridge AC–DC Converter. IEEE Trans. Ind. Electron. 2020, 67, 1048–1058. [Google Scholar] [CrossRef]
- Datta, A.J.; Ghosh, A.; Zare, F.; Rajakaruna, S. Bidirectional power sharing in an ac/dc system with a dual active bridge converter. IET Gener. Transm. Distrib. 2019, 13, 495–501. [Google Scholar] [CrossRef]
- Shao, S.; Jiang, M.; Ye, W.; Li, Y.; Zhang, J.; Sheng, K. Optimal Phase-Shift Control to Minimize Reactive Power for a Dual Active Bridge DC–DC Converter. IEEE Trans. Power Electron. 2019, 34, 10193–10205. [Google Scholar] [CrossRef]
- Wu, J.; Wen, P.; Sun, X.; Yan, X. Reactive Power Optimization Control for Bidirectional Dual-Tank Resonant DC–DC Converters for Fuel Cells Systems. IEEE Trans. Power Electron. 2020, 35, 9202–9214. [Google Scholar] [CrossRef]
- Gu, Q.; Yuan, L.; Nie, J.; Sun, J.; Zhao, Z. Current Stress Minimization of Dual-Active-Bridge DC–DC Converter Within the Whole Operating Range. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 129–142. [Google Scholar] [CrossRef]
- Vuyyuru, U.; Maiti, S.; Chakraborty, C. Active Power Flow Control between DC Microgrids. IEEE Trans. Smart Grid 2019, 10, 5712–5723. [Google Scholar] [CrossRef]
- Jeung, Y.C.; Lee, D.C. Voltage and Current Regulations of Bidirectional Isolated Dual-Active-Bridge DC–DC Converters Based on a Double-Integral Sliding Mode Control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- You, J.; Vilathgamuwa, M.; Ghasemi, N. DC bus voltage stability improvement using disturbance observer feedforward control. Control. Eng. Pr. 2018, 75, 118–125. [Google Scholar] [CrossRef]
- Jeung, Y.C.; Lee, D.C.; Dragicevic, T.; Blaabjerg, F. Design of Passivity-Based Damping Controller for Suppressing Power Oscillations in DC Microgrids. IEEE Trans. Power Electron. 2021, 36, 4016–4028. [Google Scholar] [CrossRef]
- Li, X.; Guo, L.; Zhang, S.; Wang, C.; Li, Y.W.; Chen, A.; Feng, Y. Observer-Based DC Voltage Droop and Current Feed-Forward Control of a DC Microgrid. IEEE Trans. Smart Grid 2018, 9, 5207–5216. [Google Scholar] [CrossRef]
- Chen, L.; Gao, F.; Shen, K.; Wang, Z.; Tarisciotti, L.; Wheeler, P.; Dragicevic, T. Predictive Control Based DC Microgrid Stabilization with the Dual Active Bridge Converter. IEEE Trans. Ind. Electron. 2020, 67, 8944–8956. [Google Scholar] [CrossRef]
- Ye, Q.; Mo, R.; Li, H. Impedance Modeling and DC Bus Voltage Stability Assessment of a Solid-State-Transformer-Enabled Hybrid AC–DC Grid Considering Bidirectional Power Flow. IEEE Trans. Ind. Electron. 2019, 67, 6531–6540. [Google Scholar] [CrossRef]
- Bosich, D.; Vicenzutti, A.; Grillo, S.; Sulligoi, G. A Stability Preserving Criterion for the Management of DC Microgrids Supplied by a Floating Bus. Appl. Sci. 2018, 8, 2102. [Google Scholar] [CrossRef] [Green Version]
- Feng, F.; Zhang, X.; Zhang, J.; Gooi, H.B. Stability Enhancement via Controller Optimization and Impedance Shaping for Dual Active Bridge-Based Energy Storage Systems. IEEE Trans. Ind. Electron. 2020, 68, 5863–5874. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids–Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2015, 31, 4876–4891. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, A.; Vazquez, A.; Lamar, D.G.; Hernando, M.M.; Sebastian, J. Different Purpose Design Strategies and Techniques to Improve the Performance of a Dual Active Bridge with Phase-Shift Control. IEEE Trans. Power Electron. 2015, 30, 790–804. [Google Scholar] [CrossRef]
- Liu, L.; Shan, L.; Dai, Y.; Liu, C.; Qi, Z. Improved quantum bacterial foraging algorithm for tuning parameters of fractional-order PID controller. J. Syst. Eng. Electron. 2018, 29, 166–175. [Google Scholar] [CrossRef]
- Meng, F.; Liu, S.; Liu, K. Design of an Optimal Fractional Order PID for Constant Tension Control System. IEEE Access 2020, 8, 58933–58939. [Google Scholar] [CrossRef]
- Yaghi, M.A.; Efe, M.O. H2/H∞H2/H∞-Neural-Based FOPID Controller Applied for Radar-Guided Missile. IEEE Trans. Ind. Electron. 2019, 67, 4806–4814. [Google Scholar] [CrossRef]
- Chen, C.L. Simulated annealing-based optimal wind-thermal coordination scheduling. IET Gener. Transm. Distrib. 2007, 1, 447. [Google Scholar] [CrossRef]
- Ricobbono, A.; Santi, E. Positive feedforward control of three-phase voltage source inverter for DC input bus stabilization with experimental validation. IEEE Trans. Ind. Appl. 2013, 49, 168–177. [Google Scholar] [CrossRef]
- Shi, H.; Sun, K.; Wu, H.; Li, Y. A Unified State-Space Modeling Method for a Phase-Shift Controlled Bidirectional Dual-Active Half-Bridge Converter. IEEE Trans. Power Electron. 2019, 35, 3254–3265. [Google Scholar] [CrossRef]
- Berger, M.; Kocar, I.; Fortin-Blanchette, H.; Lavertu, C. Large-signal modeling of three-phase dual active bridge converters for electromagnetic transient analysis in DC grids. J. Mod. Power Syst. Clean Energy 2019, 7, 1684–1696. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.S.; Bhattacharya, S. A Simple Unified Model for Generic Operation of Dual Active Bridge Converter. IEEE Trans. Ind. Electron. 2019, 66, 3486–3495. [Google Scholar] [CrossRef]
- Cupelli, M.; Gurumurthy, S.K.; Bhanderi, S.K.; Yang, Z.; Joebges, P.; Monti, A.; De Doncker, R.W. Port Controlled Hamiltonian Modeling and IDA-PBC Control of Dual Active Bridge Converters for DC Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 9065–9075. [Google Scholar] [CrossRef]
- Birs, I.; Muresan, C.; Nascu, I.; Ionescu, C. A Survey of Recent Advances in Fractional Order Control for Time Delay Systems. IEEE Access 2019, 7, 30951–30965. [Google Scholar] [CrossRef]
- Pullaguram, D.; Mishra, S.; Senroy, N.; Mukherjee, M. Design and Tuning of Robust Fractional Order Controller for Autonomous Microgrid VSC System. IEEE Trans. Ind. Appl. 2017, 54, 91–101. [Google Scholar] [CrossRef]
- Tolba, M.F.; Said, L.A.; Madian, A.H.; Radwan, A.G. FPGA Implementation of the Fractional Order Integrator/Differentiator: Two Approaches and Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 66, 1484–1495. [Google Scholar] [CrossRef]
- Seo, S.-W.; Choi, H.H. Digital Implementation of Fractional Order PID-Type Controller for Boost DC–DC Converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Xue, D.; Chen, Y.Q. General robustness analysis and robust fractional-order PD controller design for fractional-order plants. IET Control. Theory Appl. 2018, 12, 1730–1736. [Google Scholar] [CrossRef] [Green Version]
- Ren, H.P.; Fan, J.T.; Kaynak, O. Optimal Design of a Fractional-Order Proportional-Integer-Differential Controller for a Pneumatic Position Servo System. IEEE Trans. Ind. Electron. 2018, 66, 6220–6229. [Google Scholar] [CrossRef]
- Lino, P.; Maione, G.; Stasi, S.; Padula, F.; Visioli, A. Synthesis of fractional-order PI controllers and fractional-order filters for industrial electrical drives. IEEE/CAA J. Autom. Sin. 2017, 4, 58–69. [Google Scholar] [CrossRef] [Green Version]
- Zaihidee, F.M.; Mekhilef, S.; Mubin, M. Application of Fractional Order Sliding Mode Control for Speed Control of Permanent Magnet Synchronous Motor. IEEE Access 2019, 7, 101765–101774. [Google Scholar] [CrossRef]
- Maddahi, A.; Sepehri, N.; Kinsner, W. Fractional-Order Control of Hydraulically Powered Actuators: Controller Design and Experimental Validation. IEEE/ASME Trans. Mechatron. 2019, 24, 796–807. [Google Scholar] [CrossRef]
- Crespo, T.; Duarte, M.A.; Ceballos, G.; Lefranc, G. Fractional Order Controllers for Back-to-Back Converters. IEEE Lat. Am. Trans. 2018, 16, 2427–2434. [Google Scholar] [CrossRef]
- Wan, J.; He, B.; Wang, D.; Yan, T.; Shen, Y. Fractional-Order PID Motion Control for AUV Using Cloud-Model-Based Quantum Genetic Algorithm. IEEE Access 2019, 7, 124828–124843. [Google Scholar] [CrossRef]
- Sathishkumar, P.; Selvaganesan, N. Fractional Controller Tuning Expressions for a Universal Plant Structure. IEEE Control. Syst. Lett. 2018, 2, 345–350. [Google Scholar] [CrossRef]
- Hekimoglu, B. Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar] [CrossRef]
- Mishra, A.K.; Das, S.R.; Ray, P.K.; Mallick, R.K.; Mohanty, A.; Mishra, D.K. PSO-GWO Optimized Fractional Order PID Based Hybrid Shunt Active Power Filter for Power Quality Improvements. IEEE Access 2020, 8, 74497–74512. [Google Scholar] [CrossRef]
- Lyden, S.; Haque, E. A Simulated Annealing Global Maximum Power Point Tracking Approach for PV Modules Under Partial Shading Conditions. IEEE Trans. Power Electron. 2016, 31, 4171–4181. [Google Scholar] [CrossRef]
- Delahaye, D.; Chaimatanan, S.; Mongeau, M. Simulated Annealing: From Basics to Applications. In Handbook of Metaheuristics; Gendreau, M., Potvin, J.Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Corus, D.; Oliveto, P.S. Standard Steady State Genetic Algorithms Can Hillclimb Faster Than Mutation-Only Evolutionary Algorithms. IEEE Trans. Evol. Comput. 2017, 22, 720–732. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, J.; Fan, K.; Ma, W.; Lei, H. Prediction Method for Low Speed Characteristics of Compressor Based on Modified Similarity Theory with Genetic Algorithm. IEEE Access 2018, 6, 36834–36839. [Google Scholar] [CrossRef]
- Mohammadi, A.; Asadi, H.; Mohamed, S.; Nelson, K.; Nahavandi, S. Multiobjective and Interactive Genetic Algorithms for Weight Tuning of a Model Predictive Control-Based Motion Cueing Algorithm. IEEE Trans. Cybern. 2019, 49, 3471–3481. [Google Scholar] [CrossRef] [PubMed]
- Han, C.; Wang, L.; Zhang, Z.; Xie, J.; Xing, Z. A Multi-Objective Genetic Algorithm Based on Fitting and Interpolation. IEEE Access 2018, 6, 22920–22929. [Google Scholar] [CrossRef]
- Yang, H.; Qi, J.; Miao, Y.; Sun, H.; Li, J. A New Robot Navigation Algorithm Based on a Double-Layer Ant Algorithm and Trajectory Optimization. IEEE Trans. Ind. Electron. 2018, 66, 8557–8566. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.N.; Gong, Y.J.; Xiao, C.F.; Gao, Y.; Zhang, J. Path Planning for Autonomous Underwater Vehicles: An Ant Colony Algorithm Incorporating Alarm Pheromone. IEEE Trans. Veh. Technol. 2019, 68, 141–154. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Gong, Y.; Chen, W.N.; Gu, T.L.; Yuan, H.Q.; Zhang, J. A Dual-Colony Ant Algorithm for the Receiving and Shipping Door Assignments in Cross-Docks. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2523–2539. [Google Scholar] [CrossRef]
- Lee, J.H.; Song, J.Y.; Kim, D.W.; Kim, J.W.; Kim, Y.J.; Jung, S.Y. Particle Swarm Optimization Algorithm with Intelligent Particle Number Control for Optimal Design of Electric Machines. IEEE Trans. Ind. Electron. 2018, 65, 1791–1798. [Google Scholar] [CrossRef]
- Azab, M. Multi-objective design approach of passive filters for single-phase distributed energy grid integration systems using particle swarm optimization. Energy Rep. 2020, 6, 157–172. [Google Scholar] [CrossRef]
- Liu, Z.H.; Wei, H.L.; Zhong, Q.C.; Liu, K.; Xiao, X.S.; Wu, L.H. Parameter Estimation for VSI-Fed PMSM Based on a Dynamic PSO With Learning Strategies. IEEE Trans. Power Electron. 2016, 32, 3154–3165. [Google Scholar] [CrossRef] [Green Version]
- Azab, M. Design approach and performance analysis of trap filter for three-phase PV grid integration systems using evolutionary search algorithms. J. King Saud Univ. Eng. Sci. 2020. [Google Scholar] [CrossRef]
- Sebtahmadi, S.S.; Azad, H.B.; Kaboli, S.H.A.; Islam, D.; Mekhilef, S. A PSO-DQ Current Control Scheme for Performance Enhancement of Z-Source Matrix Converter to Drive IM Fed by Abnormal Voltage. IEEE Trans. Power Electron. 2017, 33, 1666–1681. [Google Scholar] [CrossRef]
- Sarker, K.; Chatterjee, D.; Goswami, S.K. Modified harmonic minimisation technique for doubly fed induction generators with solar-wind hybrid system using biogeography-based optimisation. IET Power Electron. 2018, 11, 1640–1651. [Google Scholar] [CrossRef]
- Pietilainen, K.; Harnefors, L.; Petersson, A.; Nee, H.P. DC-Link Stabilization and Voltage Sag Ride-Through of Inverter Drives. IEEE Trans. Ind. Electron. 2006, 53, 1261–1268. [Google Scholar] [CrossRef]
- Mueller, J.A.; Kimball, J.W. Modeling Dual Active Bridge Converters in DC Distribution Systems. IEEE Trans. Power Elec tron. 2018, 34, 5867–5879. [Google Scholar] [CrossRef]
- Tian, Y.; Peng, F.; Wang, Y.; Chen, Z. Coordinative impedance damping control for back-to-back converter in solar power integration system. IET Renew. Power Gener. 2019, 13, 1484–1492. [Google Scholar] [CrossRef]
- Zhao, N.; Liu, J.; Ai, Y.; Yang, J.; Zhang, J.; You, X. Power-Linked Predictive Control Strategy for Power Electronic Traction Transformer. IEEE Trans. Power Electron. 2020, 35, 6559–6571. [Google Scholar] [CrossRef]
- Chen, L.; Lin, L.; Shao, S.; Gao, F.; Wang, Z.; Wheeler, P.W.; Dragicevic, T. Moving Discretized Control Set Model-Predictive Control for Dual-Active Bridge with the Triple-Phase Shift. IEEE Trans. Power Electron. 2020, 35, 8624–8637. [Google Scholar] [CrossRef]
































| Particles (Birds) | Max. Iterations | Inertia Weighting Factor w | α,β |
|---|---|---|---|
| 100 | 100 | 0.05 | Random number [0,1] |
| Max. Iter. | Max. Function Evaluations | Initial Temp. | Annealing Parameters | ||
|---|---|---|---|---|---|
| Function | Interval | Decay Temperature | |||
| 1000 | 3000 × n | 100 | Boltzmann | 100 | Exponential |
| PS 1 | Creation Function | Fitness Scaling | Selection | Reproduction | Mutation | Crossover Function | ||
|---|---|---|---|---|---|---|---|---|
| Elite Count | Crossover Fraction | Function | Rate | |||||
| 100 | Uniform | Rank | Stochastic uniform | 0.05 PS | 0.8 | Uniform | 0.01 | Scattered |
| - | R (Ω) | L (H) | C (μF) |
|---|---|---|---|
| Zout1 | 0.32 | 0.011 | 800 |
| Zout2 | 0.25 | 0.011 | 600 |
| Zout3 | 0.2 | 0.011 | 400 |
| Zout4 | 0.1 | 0.011 | 400 |
| Algorithm | Controller | |||||
|---|---|---|---|---|---|---|
| Voltage Controller | Current Controller | |||||
| Parameters | Parameters | |||||
| Kp1 | Ki1 | λ1 | Kp2 | Ki2 | λ2 | |
| PSO | 9.4 | 0.163 | 1.74 | 8.42 | 0.56 | 1.44 |
| SA | 16.3 | 1 | 0.155 | 4.21 | 6.85 | 0.105 |
| GA | 33.55 | 0.673 | 0.217 | 4.89 | 18.24 | 0.32 |
| ITEM | PSO | SA | GA | |
|---|---|---|---|---|
| Algorithm convergence | Number of iterations to converge | 18 | 40 | 10 |
| Iteration run time (s) | 4–6 | 0.5–1 | 10–12 | |
| Algorithm convergence time (min) | 1.2–1.8 | 0.33–0.66 | 1.66–2 | |
| Performance under linear load (Resistive) | Settling time (s) | ≅0.002 | ≅0.002 | ≅0.002 |
| Peak overshoot (% of reference voltage) | ≈3 | ≅3 | ≅3 | |
| Voltage ripple during load variation (%) | 1.26 | 0.90 | 0.70 | |
| Transient peak voltage dip (V) | 7.5 | 4.5 | 3.75 | |
| Performance under (CPL) | Voltage dip due to sudden load change (V) | 1.5 | 1.3 | 0.30 |
| Voltage dip due to sudden load change (%) | 0.75 | 0.65 | 0.15 | |
| Performance with a single-phase inverter | Voltage dip due to sudden load change with square-wave inverter (%) | 0.8 | 0.55 | 0.15 |
| Voltage dip due to sudden load change with SPWM inverter (%) | 0.85 | 0.75 | 2.45 1.65 * | |
| Low-order harmonic magnitude voltage (%) | 0.076 | 0.054 | 0.042 0.038 * |
| Algorithm | Voltage Dip Due to Inductor Lk Uncertainty (Lk Nominal = 170 μH) | ||
|---|---|---|---|
| Lk min = 120 μH | Lk = 170 μH | Lk max = 220 μH | |
| PSO | 1.60 V | 1.63 V | 1.70 V |
| SA | 0.99 V | 1.02 V | 0.93 |
| GA | 0.50 V | 0.52 V | 0.51 |
| Algorithm | Voltage Dip Due to Inductor ESR Uncertainty (Rk Nominal = 0.2 Ω) | ||
|---|---|---|---|
| Rk min = 0.05 Ω | Rk = 0.2 Ω | Rk max = 1 Ω | |
| PSO | 1.80 V | 1.63 V | 1.60 V |
| SA | 1.05 V | 1.02 V | 1.02 V |
| GA | 0.60 V | 0.52 V | 0.50 V |
| Algorithm | Voltage Dip Due to Inductor Lk Uncertainty (C1 Nominal = 400 μF) | ||
|---|---|---|---|
| C1 min = 480 μF | C1 = 400 μF | C1 max = 320 μF | |
| PSO | 1.59 V | 1.63 V | 1.60 V |
| SA | 1.01 V | 1.02 V | 1.06 V |
| GA | 0.51 V | 0.518 V | 0.519 V |
| Algorithm | Voltage Dip due to Inductor Lk Uncertainty (C2 Nominal = 400 μF) | ||
|---|---|---|---|
| C2 min = 480 μF | C2 = 400 μF | C2 max = 320 μF | |
| PSO | 1.58 V | 1.63 V | 1.68 V |
| SA | 1.00 V | 1.02 V | 1.05 V |
| GA | 0.498 V | 0.52 V | 0.541 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azab, M.; Serrano-Fontova, A. Optimal Tuning of Fractional Order Controllers for Dual Active Bridge-Based DC Microgrid Including Voltage Stability Assessment. Electronics 2021, 10, 1109. https://doi.org/10.3390/electronics10091109
Azab M, Serrano-Fontova A. Optimal Tuning of Fractional Order Controllers for Dual Active Bridge-Based DC Microgrid Including Voltage Stability Assessment. Electronics. 2021; 10(9):1109. https://doi.org/10.3390/electronics10091109
Chicago/Turabian StyleAzab, Mohamed, and Alexandre Serrano-Fontova. 2021. "Optimal Tuning of Fractional Order Controllers for Dual Active Bridge-Based DC Microgrid Including Voltage Stability Assessment" Electronics 10, no. 9: 1109. https://doi.org/10.3390/electronics10091109
APA StyleAzab, M., & Serrano-Fontova, A. (2021). Optimal Tuning of Fractional Order Controllers for Dual Active Bridge-Based DC Microgrid Including Voltage Stability Assessment. Electronics, 10(9), 1109. https://doi.org/10.3390/electronics10091109