
Online Trajectory Planning Method for Double-Pendulum Quadrotor Transportation Systems


Abstract
:1. Introduction
- The proposed method can be used for online trajectory planning without the need for offline design of the quadrotor speed and acceleration.
- The method can restrain the hook swing and payload swing without any adverse effects on the positioning performance.
- The method can ensure that the core indexes, e.g., the maximum acceleration and velocity of the quadrotor, are constrained.
2. Dynamical Model
3. Online Trajectory Generation
4. Convergence Analysis
5. Simulation Analysis
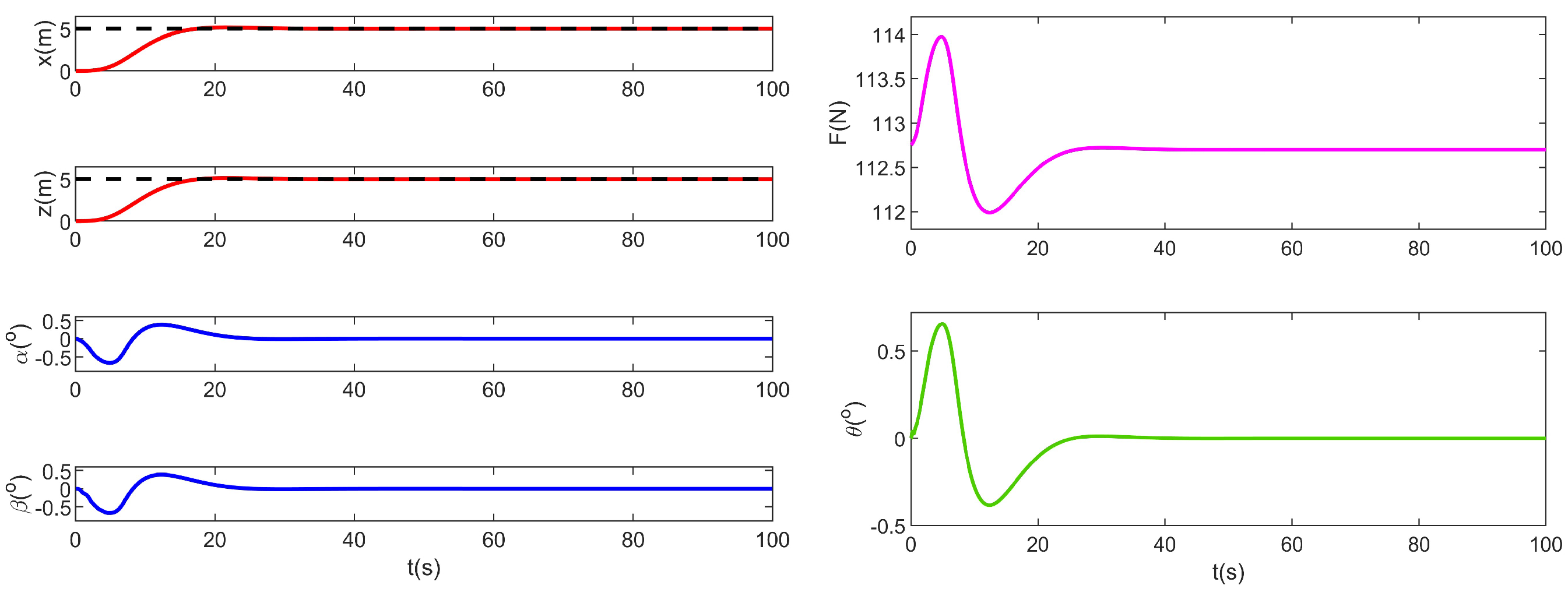
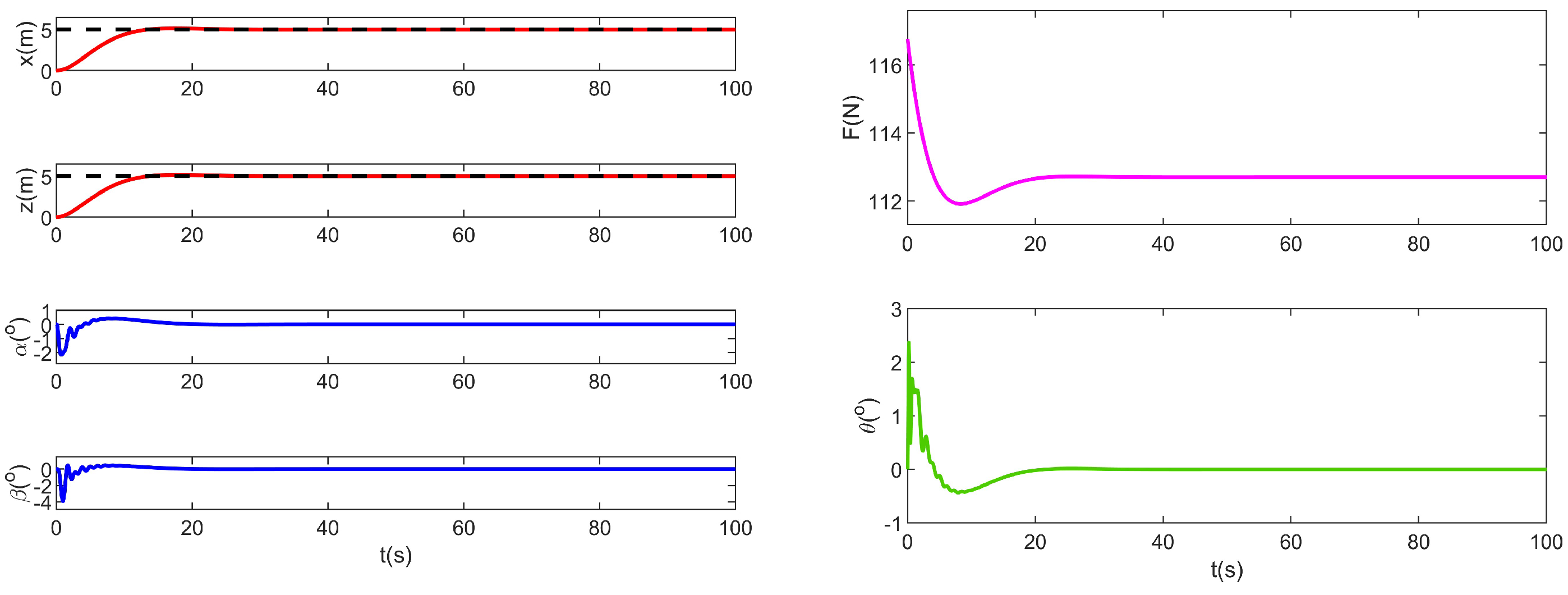
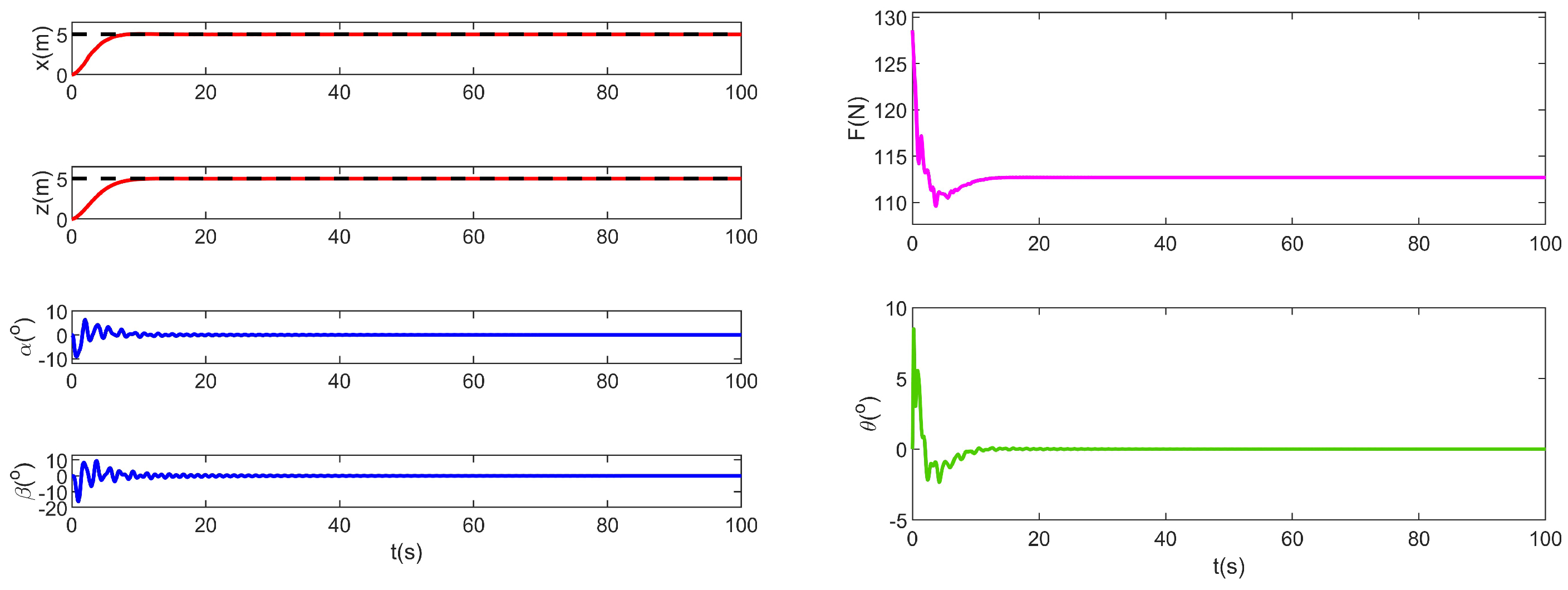
5.1. Comparison Test
- Final position of the quadrotor .
- Transportation time (the time when the quadrotor reaches the target position).
- The maximum swing angles of the hook and payload during transportation , .
- Consumption of driving energy in the entire transportation process .
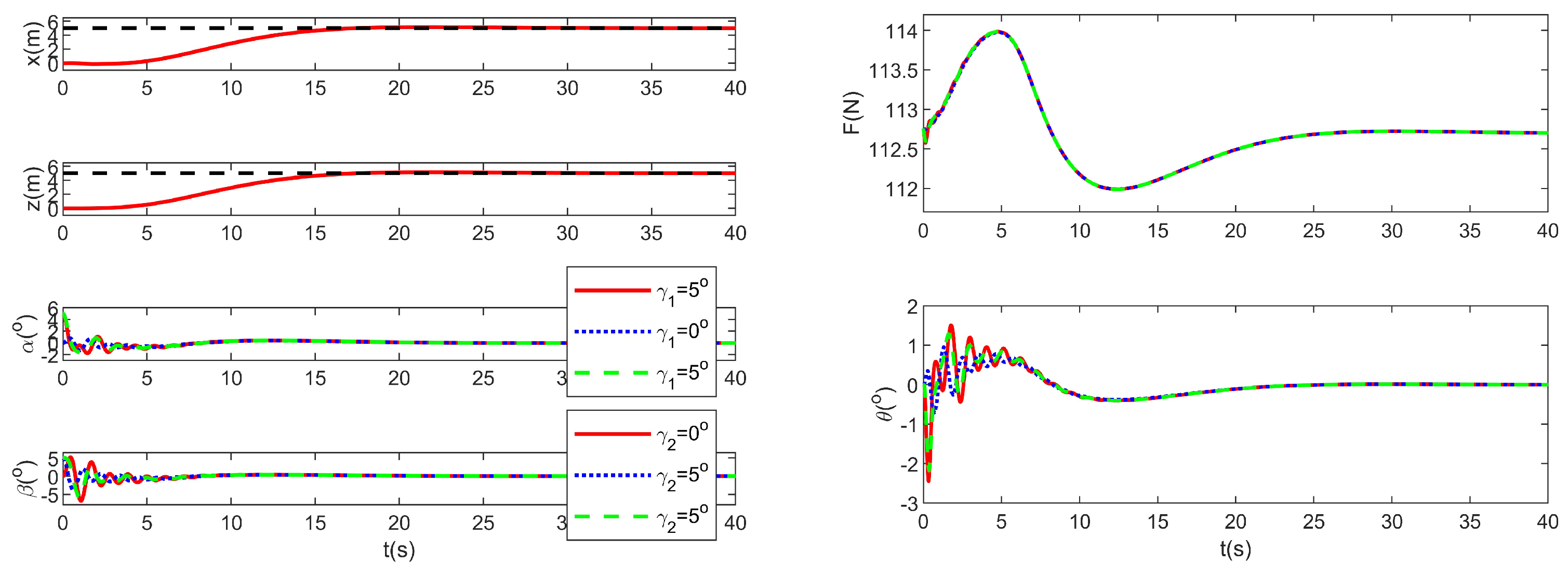
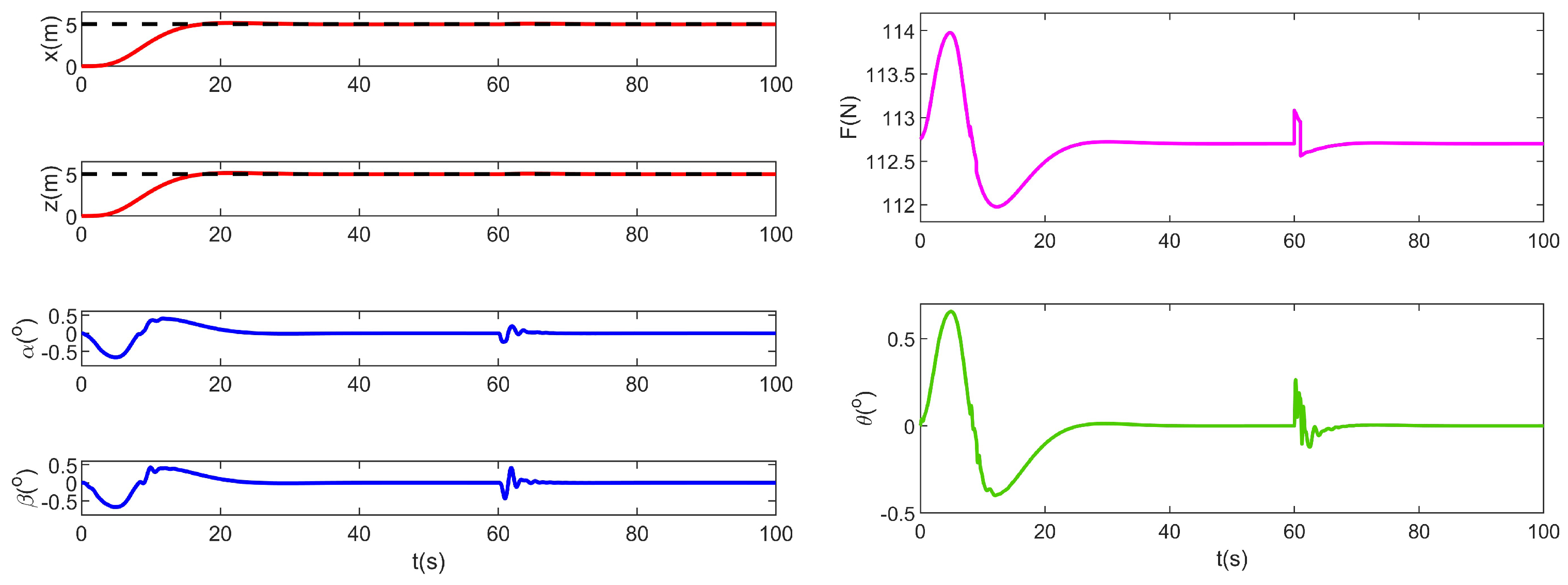
5.2. Robustness Test
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| PID | Proportional–integral–derivative |
| PD | Proportional–derivative |
References
- Nayak, A.; Banavar, R.N.; Maithripala, D.H.S. Stabilizing a spherical pendulum on a quadrotor. Asian J. Control 2021. [Google Scholar] [CrossRef]
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Lewis, F.L. Data-Driven Fault-Tolerant Control for Attitude Synchronization of Nonlinear Quadrotors. IEEE Trans. Autom. Control 2021, 66, 5584–5591. [Google Scholar] [CrossRef]
- Tian, B.; Lu, H.; Zuo, Z.; Zong, Q.; Zhang, Y. Multivariable finite-time output feedback trajectory tracking control of quadrotor helicopters. Int. J. Robust Nonlinear Control 2018, 28, 281–295. [Google Scholar] [CrossRef]
- Trubia, S.; Curto, S.; Severino, A.; Arena, F.; Puleo, L. The use of UAVs for civil engineering infrastructures. In AIP Conference Proceedings; AIP Publishing LLC: Crete, Greece, 2021; p. 110012. [Google Scholar]
- Us, K.; Cevher, A.; Sever, M.; Kirli, A. On the Effect of Slung Load on Quadrotor Performance. Procedia Comput. Sci. 2019, 158, 346–354. [Google Scholar] [CrossRef]
- Guerrero, M.E.; Mercado, D.A.; Lozano, R.; Garcia, C.D. Passivity based control for a quadrotor UAV transporting a cable-suspended payload with minimum swing. In Proceedings of the IEEE Conference on Decision and Control, Osaka, Japan, 15–18 December 2015; pp. 6718–6723. [Google Scholar]
- Dauer, J.C.; Dittrich, J.S. Automated cargo delivery in low altitudes: Concepts and research questions of an operational-risk-based approach. In Automated Low-Altitude Air Delivery; Springer: Berlin/Heidelberg, Germany, 2022; pp. 3–23. [Google Scholar]
- Villa, D.K.; Brandão, A.S.; Sarcinelli-Filho, M. A survey on load transportation using multirotor uavs. Int. J. Robust Nonlinear Control 2019, 98, 267–296. [Google Scholar] [CrossRef]
- Tang, S.; Sreenath, K.; Kumar, V. Multi-robot trajectory generation for an aerial payload transport system. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1055–1071. [Google Scholar]
- Klausen, K.; Meissen, C.; Fossen, T.I.; Arcak, M.; Johansen, T.A. Cooperative control for multirotors transporting an unknown suspended load under environmental disturbances. IEEE Trans. Control Syst. Technol. 2018, 28, 653–660. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Gu, D.; Zha, W.; Zhu, X.; Su, Y. Controlling a Quadrotor Carrying a Cable-Suspended Load to Pass Through a Window. J. Intell. Robot. Syst. 2019, 98, 387–401. [Google Scholar] [CrossRef]
- Li, X.; Zhang, J.; Han, J. Trajectory planning of load transportation with multi-quadrotors based on reinforcement learning algorithm. Aerosp. Sci. Technol. 2021, 2021, 106887. [Google Scholar] [CrossRef]
- Hua, H.; Fang, Y.; Zhang, X.; Qian, C. A New Nonlinear Control Strategy Embedded With Reinforcement Learning for a Multirotor Transporting a Suspended Payload. IEEE/ASME Trans. Mechatron. 2021. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A trajectory tracking control law for a quadrotor with slung load. Automatica 2019, 16, 384–389. [Google Scholar] [CrossRef]
- Alothman, Y.; Gu, D. Quadrotor transporting cable-suspended load using iterative linear quadratic regulator (ilqr) optimal control. In Proceedings of the 8th Computer Science and Electronic Engineering, Colchester, UK, 28–30 September 2016; pp. 168–173. [Google Scholar]
- Alothman, Y.; Guo, M.; Gu, D. Using iterative LQR to control two quadrotors transporting a cable-suspended load. IFAC-PapersOnLine 2017, 50, 4324–4329. [Google Scholar] [CrossRef]
- Potter, J.; Singhose, W.; Costelloy, M. Reducing swing of model helicopter sling load using input shaping. In Proceedings of the 9th IEEE International Conference on Control and Automation, Santiago, Chile, 19–21 December 2011; pp. 348–353. [Google Scholar]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. Dynamics analysis and time-optimal motion planning for unmanned quadrotor transportation systems. Mechatronics 2018, 50, 16–29. [Google Scholar] [CrossRef]
- Qi, J.; Ping, Y.; Wang, M.; Wu, C. A segmented energy-based nonlinear tracking control method for quadrotor transport system. Asian J. Control 2021. [Google Scholar] [CrossRef]
- Yu, G.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Nonlinear backstepping control of a quadrotor-slung load system. IEEE/ASME Trans. Mechatron. 2019, 24, 2304–2315. [Google Scholar] [CrossRef]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. A novel energy-coupling-based hierarchical control approach for unmanned quadrotor transportation systems. IEEE/ASME Trans. Mechatron. 2019, 24, 248–259. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, R.; Zhang, J.; Zhang, X. Stabilization of a quadrotor with uncertain suspended load using sliding mode control. In Proceedings of the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar]
- Kui, Y.; Feng, G.; Liying, Y.; Yuqing, H.; Jianda, H. Sliding mode control for a quadrotor slung load system. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 3697–3703. [Google Scholar]
- Yang, S.; Xian, B. Energy-based nonlinear adaptive control design for the quadrotor UAV system with a suspended payload. IEEE Trans. Ind. Electron. 2019, 67, 2054–2064. [Google Scholar] [CrossRef]
- Ouyang, H.; Xu, X.; Zhang, G. Tracking and load sway reduction for double-pendulum rotary cranes using adaptive nonlinear control approach. Int. J. Robust Nonlinear Control 2020, 30, 1872–1885. [Google Scholar] [CrossRef]
- Liang, X.; Lin, H.; Fang, Y.; Zhang, P.; Li, C.; Zhao, X. Dynamics Modeling and Analysis for Unmanned Quadrotor Transportation Systems with Double-Pendulum Swing Effects. In Proceedings of the IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 628–633. [Google Scholar]
- Liang, X.; Zhang, P.; Fang, Y.; Lin, H.; He, W. Nonlinear Control for Aerial Transportation Systems with Double-Pendulum Swing Effects. IEEE Trans. Ind. Electron. 2020, 68, 6020–6030. [Google Scholar] [CrossRef]
- Mar, R.; Goyal, A.; Nguyen, V.; Yang, T.; Singhose, W. Combined input shaping and feedback control for double-pendulum systems. Mech. Syst. Signal Process. 2017, 85, 267–277. [Google Scholar] [CrossRef]
- Huang, J.; Liang, Z.; Zang, Q. Dynamics and swing control of double-pendulum bridge cranes with distributed-mass beams. Mech. Syst. Signal Process. 2015, 54, 357–366. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Rong, X.; Song, R.; Tian, X.; Li, Y. A novel energy-coupling-based control method for double-pendulum overhead cranes with initial control force constraint. Adv. Mech. Eng. 2018, 10, 1687814017752213. [Google Scholar] [CrossRef] [Green Version]
- Frikha, S.; Djemel, M.; Derbel, N. A new adaptive neuro-sliding mode control for gantry crane. Int. J. Control Autom. Syst. 2018, 16, 559–565. [Google Scholar] [CrossRef]
- Chen, Q.; Cheng, W.; Gao, L.; Fottner, J. A pure neural network controller for double-pendulum crane anti-sway control: Based on Lyapunov stability theory. Asian J. Control 2021, 23, 387–398. [Google Scholar] [CrossRef]
- Peng, H.; Shi, B.; Wang, X.; Li, C. Interval estimation and optimization for motion trajectory of overhead crane under uncertainty. Nonlinear Dyn. 2019, 96, 1693–1715. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y. An efficient online trajectory generating method for underactuated crane systems. Int. J. Robust Nonlinear Control 2014, 24, 1653–1663. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Methods | |||||
|---|---|---|---|---|---|
| PD control | (5.0, 5.0) | 12.0 | 9.0 | 16.1 | 128.6 |
| Nonlinear control | (5.0, 5.0) | 13.5 | 2.2 | 3.9 | 116.8 |
| Online trajectory planning | (5.0, 5.0) | 17.4 | 0.7 | 0.7 | 114.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, J.; Ping, Y.; Wang, M.; Wu, C. Online Trajectory Planning Method for Double-Pendulum Quadrotor Transportation Systems. Electronics 2022, 11, 50. https://doi.org/10.3390/electronics11010050
Qi J, Ping Y, Wang M, Wu C. Online Trajectory Planning Method for Double-Pendulum Quadrotor Transportation Systems. Electronics. 2022; 11(1):50. https://doi.org/10.3390/electronics11010050
Chicago/Turabian StyleQi, Juntong, Yuan Ping, Mingming Wang, and Chong Wu. 2022. "Online Trajectory Planning Method for Double-Pendulum Quadrotor Transportation Systems" Electronics 11, no. 1: 50. https://doi.org/10.3390/electronics11010050
APA StyleQi, J., Ping, Y., Wang, M., & Wu, C. (2022). Online Trajectory Planning Method for Double-Pendulum Quadrotor Transportation Systems. Electronics, 11(1), 50. https://doi.org/10.3390/electronics11010050