Abstract
For urban digital twin, this paper comes up with a novel urban data acquisition scheme, denoted by collaborative reliable event transport (cRET), that conducts micro-scale sensing resolution in urban environments. cRET relies on battery-powered sensors with Bluetooth low-energy (BLE) modules and the smart mobile devices that people carry around urban places. However, the traditional data acquisition schemes with mobile assistance suffer from the poor communication channel quality of BLE. So, it is tough to achieve enough reliability of event observation. Hence, cRET utilizes overhearing-based collaboration among sensors to improve the data delivery ratio. It also could support reliable transmission over mobile devices despite high-speed moving. A proof-of-concept demonstrates that the reliability is improved by the overhearing and collaboration among sensors against low-channel conditions and a high moving speed of mobile devices, i.e., 30 km/h and more.
1. Introduction
In the era of digital transformation, a digital twin has emerged as a key technology. Especially, the digital twin comes up as the next-generation technology to accelerate the smart city []. The urban digital twin through urban digitization aims to provide virtual twin models in order to solve many urban problems, such as traffic congestion, noise pollution, air pollution, water pollution, disaster, and so on [,]. The virtual twin model as a virtual representation of urban physical assets is built and should be updated as changes in their physical assets through virtual three-dimensional modeling, visualization, machine learning, and so on [,]. The provisioning for this urban digital twin fundamentally demands a huge number of various kinds of data, e.g., floating population, noise level, temperature, humidity, wind speed, air quality, traffic, etc., about the city []. Meanwhile, the city includes several spaces, such as a commercial district, residential district, green area, urban transport area, etc. Nowadays, an enormous number of sensors have been distributed throughout such urban areas. Thus, it is not a trivial to acquire such data from a large number of sensors in terms of network scalability and transmission reliability.
For this, low-power wide-area network (LPWAN) technologies, i.e., LoRa, Sigfox, etc., may be employed due to wide coverage by their long-range communication. However, such LPWAN is vulnerable to congestion and collisions due to the massive connectivity in urban environments where a vast number of sensors are ubiquitously deployed in the city []. This is because hotspot issues frequently occur in which data from such sensors to one gateway are concentrated. Therefore, this paper comes up with a novel strategy to effectively acquire data from sensors via mobile devices in the citywide area where cellular network infrastructures are well deployed. This strategy relies on off-the-shelf BLE-enabled sensors and mobile devices located ubiquitously on the streets or roadsides. So, sensing data are transmitted to mobile devices via the Bluetooth low-energy (BLE) channel. Then, the sensing data from mobile devices are collected centrally in data storage on the Internet. We denote it mobile-assisted urban sensing (MaUS).
There has emerged a MaUS based on the mobile relay that delivers data from sensors to a BS via mobile devices carried by people walking, riding a bike, and taking a vehicle in urban places [,]. The mobile devices could allow their resources to acquire data from sensors around them even while using them, since nowadays, mobile devices have powerful resources such as high-performance chips with low-power technology, a large volume of memory, etc. In other words, citizens would share some resources of their own mobile devices to acquire data via participatory or opportunistic means []. Since such mobile users already have connectivity in every region within cities, the mobile-assisted manners can overcome costly infrastructure construction problems to cover citywide areas through wireless network technologies, such as BLE and Wi-Fi, embedded on their own mobile devices. Unlike LPWAN, it could locally limit the influence on congestion and collisions by short-range communication with sensors around itself. In other words, BLE employed in our scheme brings the effect that the overhead of total data traffic in an urban-scale area is distributed to the location of each sensor, since data transmission is achieved within only the sensor’s own communication coverage by using mobile devices carried by urban people.
Meanwhile, in such MaUS, the reliability of sensing events, named event reliability (ER), is a typical factor to provisioning accurate information services []. To achieve the required accuracy of event sensing, the adequate number of reporting data into a cloud server is a common requirement [,]. So, previous studies came up with various ideas to accomplish the requirement. In common, when mobile devices communicate with BLE-running sensors deployed in the city, the mobile devices employ two typical approaches for communication with the sensors: connection-based approach (CA) and broadcast-based approach (BA). However, the traditional approaches have communication issues for transmission reliability in the data acquisition environment that relays digital data from stationary sensors installed at a point to the Internet server via devices with mobility. Due to the inherent properties of BLE communication, the communication approaches of previous works could not guarantee ER achievement for mobile users. Especially, the connection-based approach which has to beforehand perform the connection procedure for data exchange is difficult to support high-speed mobile users with short available time for communication.
To solve the problem, this paper proposes a collaborative data acquisition scheme based on only the broadcast manner instead of considering the connection manner together: so-called collaborative reliable event transport (cRET). As shown in Figure 1, BLE-running sensors broadcast their sensing data to the air. So, all mobile devices and other sensors within a transmission range of a sensor received the data. To apply this overhearing environment, sensors in cRET also accept data received from other sensors and transmit both data from themselves and others. To realize this idea, cRET allocates scanning periods of BLE between adverting periods for data broadcasting. So, each sensor is able to overhear other sensor’s data. In addition, cRET forms the comprehensive sensing data packet with local area networking identifiers for the naming of sensors in a local region. In the realistic BLE communication nature, the wireless link quality is poor, and the loss ratio for high-speed mobile nodes is dramatically increased. The proof-of-concept prototype of cRET shows that it could achieve ER requirements in such harsh communication environments.
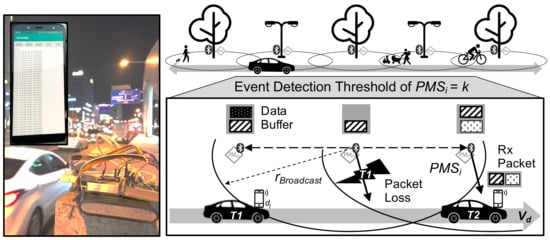
Figure 1.
Urban Monitoring Environment with Collaborative Reliable Event Detection.
The rest of this paper is organized as follows. Section 2 describes related studies. In Section 3, we come up with and addresses the collaborative reliable event transport (cRET). Then, the various experimental results are explained in Section 4. Finally, Section 5 concludes this article with performance evaluation results and presents future work.
2. Related Work
In this section, we investigate related studies to traditional data acquisition schemes over the wireless communication channel. Then, we analyze each scheme in terms of data transmission using mobile devices on fast-moving subjects.
As mentioned in Introduction section, the acquisition schemes of related studies are classified under two heads: the connection-based communication manner and the broadcast-based communication manner.
2.1. Connection-Based Communication
In the traditional connection-based communication manners, data exchange is achieved by the connection procedure of communication between sensors and mobile devices [,,]. In [], the AirSense system is proposed to monitor micro-level monitoring of air quality at indoor and outdoor places. In the system, the mobile devices as data collectors deliver data from air quality sensors, named air quality monitoring devices (AQMDs), to a cloud server on the Internet. When the mobile device is near a sensor installed at a point in the city, it tries to connect with the sensor over a Bluetooth communication channel. The mobile device brings a tuple <sensor’s id, sensed data> from the sensor if the connection is successfully established. After disconnection with the sensor, the mobile device delivers the tuple to the cloud server over cellular networks, e.g., 3G-UMTS, 4G-LTE, etc.
In [], a new mobile-crowdsensing scheme is introduced in which mobile devices collect data from external sensor devices employed to detect more various environmental data. Such external sensor devices have three kinds of sensors, i.e., temperature, pressure, and humidity. Such sensors are installed on an Arduino board with BLE technology. Data generated by this sensor device are collected via the mobile device, which is the same as a process of data collection of [].
In [], the adaptive flow control (AFC) scheme is proposed to support a more reliable communication scheme in an environment where the connection-based communication between the sensor and mobile device with its arbitrary mobility is unreliable. The arbitrary mobility of mobile devices makes it difficult to maintain connection by unexpected termination when the mobile device is out of the communication range of the sensor. Thus, in this AFC scheme, a key point is to detect deviations from the communication range between the sensor and mobile device based on the movement information and the location information. For this, the AFC scheme estimates and exploits a connection time with these two types of information. The connection time means the duration where the sensor and mobile device are capable of communicating with each other. In other words, communication between two devices is not possible if the connection times out.
In summary, traditional connection-based communication does not support reliable transmission as the mobile device randomly moves in the real world. This is because such random mobility disturbs stable data transmission, since such mobility makes it difficult to meet the requirement that a mobile device needs to stand nearby the stationary sensor and has to maintain a location until the communication is terminated. Although the AFC scheme in [] considers an environment with such mobility, the data transmission ratio is significantly dropped once the threshold of a certain movement speed is exceeded. In other words, it is inadequate to support reliable communication. In this way, the connection-based manner paradoxically aggravates data transmission reliability in communication environments with the mobility of data collectors. Since mobility is related to the available time for communication between devices, this could be worse as the moving speed of mobile devices is higher.
2.2. Broadcast-Based Communication
To mitigate the above problem, broadcast-based communication manners could be chosen. By the evolution of BLE technology, traditional broadcast-based manners operate without a connection procedure [,]. Here, each sensor advertises its own data around and each mobile device periodically scans the advertised data; data exchange in this communication is accomplished when they are within a communication range of each other.
As one of the related studies, BLE-based proximity monitoring in [] is presented to detect human mobility in a workplace. In proximity sensing, a broadcast-based communication mode is more suitable, since a connection-based mode not only is restricted to two devices for communication but also causes delays before data exchange. For this, the proximity sensors are deployed in the workplace environment, and they periodically disseminate BLE-advertising packets around. Then, the mobile user could receive the data including proximity information from such sensors over BLE communication. With this, for accurate proximity monitoring, it detects when the mobile user closely contacts with the proximity sensor.
In [], a BLE-based indoor positioning scheme is proposed to measure a mobile user based on the received signal information from a number of BLE-enabled beacons deployed around. For accurate positioning, it is important to sufficiently collect data from nearby BLE beacons at a point within indoor places. In other words, such positioning data are collected for a long time interval. Therefore, the mobile user should not deviate from the communication ranges of all beacons related to data gathered at the beginning time of positioning before the positioning is terminated. With this, the accuracy of indoor positioning could be improved.
In summary, the broadcast-based manner allows data acquisition at a low cost without communication processes such as connection procedures. With this property, it could be regarded as an appropriate manner to deliver data from stationary sensors to mobile devices that move on fast. This is because it can even utilize connection time for data delivery. However, in each relevant study, the operation of their applications is based on the data of every beacon. In other words, since they depend on the location of beacons, the application service is discontinued when the mobile device leaves the place where beacons are deployed. So, in common with connection-based manners, this problem would be deepened by the movement speed of mobile devices.
3. Collaborative Reliable Event Transport
3.1. Collaborative Data Acquisition
The collaborative data acquisition is achieved by a set of sensors with an overhearing technique, and the overhearing is carried out by broadcast-based communication [,]. By the collaboration between sensors, each sensor could participate in work to deliver the data from an adjacent sensor to a mobile device via oneself. With this, our scheme obtains the effect that expands a range of data transmission. Accordingly, the mobile device could acquire the data of the old sensor from the new sensor despite being out of the communication range of the old sensor. In this way, the collaborative data acquisition, which exchanges data between sensors by overhearing, could increase the opportunity of transmission for data of a certain sensor. As a result, it leads to improving the reliability of the detection of urban events. The operation parameters are summarized in Table 1.

Table 1.
List of Operation Parameters.
3.2. Overhearing for Collaboration between Sensors
Before we explain overhearing, the basic technique of collaboration, we should comprehend that the sensor and mobile device have communication processes: (1) advertising and (2) scanning process. The advertising process is to propagate sensory data . The process is performed at every . This advertising process advertises data through advertising channels within an . The scanning process is used to receive sensory data . The process is performed at every . This scanning process is operated for the length of the scan window in the starting point of the . The successful communication means the advertised data from one device reach another device within the scan window.
Figure 2 is a flow diagram of communication for overhearing among sensors and a mobile device when passes through a line of s in one way. is nearby at and around at . Each sensor has two periods of communication. One is a period of that advertises its own data, and another is a period of scan window that is used to overhear data from adjacent sensors. Each sensor with these two periods independently conducts communication as is pre-configured.
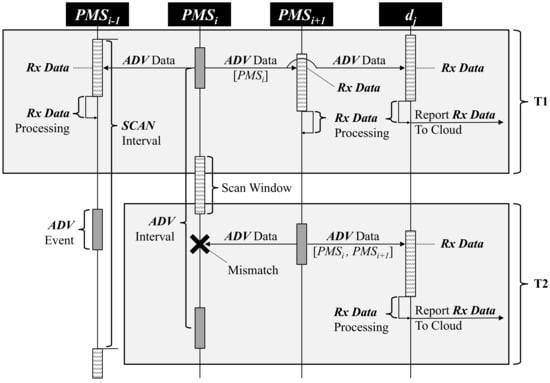
Figure 2.
Flow Diagram of Overhearing among Sensors and a Mobile Device.
First, at , the data advertised from are delivered to others, which are , , and . If the data of are advertised at , then other devices receive the data within themselves scan window. After receiving , each device performs data processing for . As a result of the data processing, reports to the cloud, which is its own destination. Meanwhile, each would prepare to disseminate the overheard data of other .
Second, at , advertises the overheard data at to others, which are and . Similarly, sends a packet including overheard data and its own data around itself. Unfortunately, when advertises the packet, it is out of bounds for the scan window of . Thus, cannot acquire the packet by the mismatch of and scan window. On the other hand, would acquire the packet, since the data advertised are reached in the bounds of its scan window. Consequentially, receives the data of from .
3.3. Algorithm for Collaborative Reliable Event Transport
In collaborative reliable event transport (cRET), each sensor has to work on switching two communication processes periodically. This is because the sensor has to perform not only the advertising process but also the scan process for overhearing, which receives data from adjacent sensors. For this, the cRET is achieved by a key algorithm. Algorithm 1 is operated on the sensor until the end of its own battery lifetime . The sensor configures the communication schedule for two processes. One is the scan interval for scanning data from other sensors. Another is the advertisement interval for advertising its own or overheard data. When is ‘’, the sensor enters the scanning process. The sensor brings data from the reception buffer and executes data processing for overheard data. The sensor then pushes the processed data in the transmission buffer . At this time, is inserted at the head of . If there are data in the head, are stored with the existing data. The packet which includes these data will be sent after the next . When is ‘’, then the sensor enters the advertising process. The sensor checks for data to be transmitted to adjacent sensors. If data exist in the buffer, then the sensor advertises the data. This algorithm enables one sensor to communicate with other sensors nearby.
According to the above algorithm, cRET is able to exchange its data between adjacent sensors. Thus, the sensor is able to transmit its own data to other sensors farther away with multi-hop communication. However, we restrict the range of communication hop to one-hop by cRET in order to prevent the excessive use of energy from battery-powered sensors. Under this condition, Equation (1) presents a probability of success for data transmission that delivers one data through the number of sensors. Since all sensors and mobile devices initially operate in broadcasting mode, it has a packet loss: and . So, we derive a probability that a mobile device receives one data from the number of sensors by exploiting and as follows:
where means a packet loss ratio with communication between a sensor and mobile device, and means packet loss ratio with the overhearing between sensors. is the number of sensors within a range in one hop.
Equation (2) estimates a reliability for transmission under the aforementioned assumption. is computed with and as follows:
where is the number of mobile devices, which are located at once around a certain sensor. be deduced by Equation (1). Each sensor disseminates sensing data in a pre-configured advertising interval . k means the threshold for event detection.
| Algorithm 1: Operation for Overhearing on Sensor |
| 1: |
| 2: |
| 3: ‘’ |
| 4: ‘’ |
| 5: while do |
| 6: if ‘’ then |
| 7: |
| 8: if then |
| 9: |
| 10: |
| 11: end if |
| 12: end if |
| 13: if ‘’ then |
| 14: |
| 15: if then |
| 16: |
| 17: end if |
| 18: end if |
| 19:end while |
4. Performance Evaluation
This section explains performance evaluation via the proof of concept with three sensor nodes composed of Bluetooth (Bluetooth 5.0, BLE) and laser particular matter (PM2007) on the Raspberry Pi 4 platform and ten mobile phones with iOS version 14.2 and Android OS version 9.0 run.
Experiments have been conducted in environments where sensor nodes are consecutively deployed on a street, and there are a number of wireless communication devices that continuously advertise their own wireless signal with diverse transmission power. Experiments are designed to compare cRET with the existing works proposed that merely rely on one of the communication modes, i.e., the traditional broadcast-based approach (BA) or connection-based approach (CA), and do not consider event reliability. The traditional broadcast-based approach represents research in [,,]. The traditional connection-based approach represents studies in [,]. Mobile devices with different , , and the sensors with various and are taken into account. We collect twenty thousand values as data.
4.1. Preliminary Experiments for Sensors
In this section, we explore the BLE-based overhearing between sensors with wireless communications.
Figure 3 shows impacts on a data transmission success ratio (DTSR) in BA and CA, respectively. In all communication manners, DTSR is a downward trend according to . Especially, DTSR is dramatically changed in the case of CA. DTSR is below 30% when is over 10 km/h as well as 0% when is 30 km/h. This result means CA is not an appropriate approach when mobile devices relay data in environments with them moving at high speed. CA fundamentally requires a connection process, such as connection establishment and close, for data communication. However, the movement of mobile devices makes it difficult to successfully complete the connection process. In other words, mobile devices may be out of the communication range of the sensor before the connection establishment is finished. On the other hand, in the case of BA, the DTSR is higher than that of CA. Since BLE supports data transmission without the connection process, BA has a tolerance of mobile devices that are fast moving in comparison with CA. This is because it allows one-way communication using the advertisement operation of sensors and scan operation of mobile devices. We discover that DTSR is affected by the of a mobile device in a broadcast-based approach. This is because it increases the opportunity for data reception of the mobile device as the period of scan is shorter. Thus, as seen in Figure 3, DTSR is higher when is 100 ms than when it is 1000 ms. Meanwhile, DTSR is close to 0% when is 30 km/h and is 1000 ms. This is because the communication opportunity is remarkably lower as is higher. Therefore, we have found two facts. One is that connection-based manners are not suitable for communication between stationary sensors and mobile devices that are fast moving. Another is that data exchange among wireless communication devices is vulnerable to the long in broadcast-based manners.
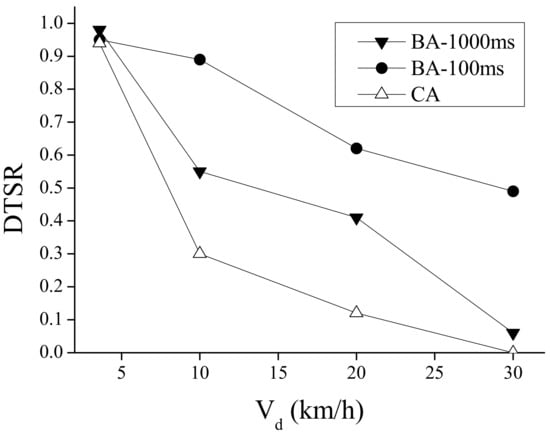
Figure 3.
versus DTSR.
Next, three experiments are to ascertain , , and impact on the reliability for wireless communications among sensors with overhearing. First, Figure 4 shows the impact of a distance between adjacent sensors for DTSR in which the and of all sensors are 1000 ms. As the result, DTSR is a slightly downward tendency when the increases from 1 to 5 m. This is because the signal strength of the sensor is declined by the distance. However, as the result, DTSR is kept on above 80% even if the distance between sensors increases. The result shows that the data transmission reliability is slight for the physical distance between sensors.
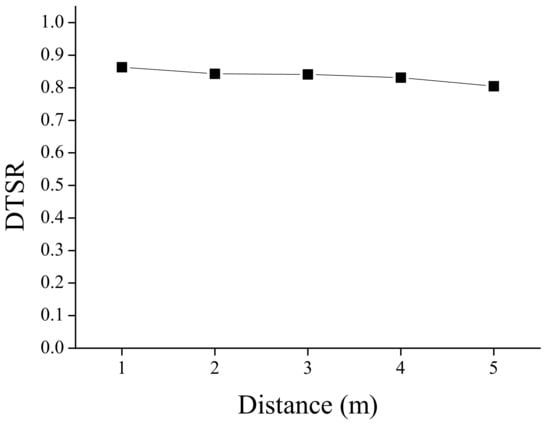
Figure 4.
Distance versus DTSR.
Second, Figure 5 presents the impact on DTSR when the fixed distance between sensors is 5 m and is 1000 ms. A sensor as a receiver performs the scan that tries to receive data from adjacent sensors as a transmitter. Since the number of transmitted data is determined by while conducting this experiment, the opportunity that gains data is equal to even if the sensor as a receiver is trying many times. On the other hand, when the receiver is moving with its own speed as shown in Figure 3, the scan operation many times to receive one data advertised from a sensor could be contributed to improving DTSR. This is because the length of communication distance is subordinate to moving speed and the length is related to the opportunity of communication. As Figure 5 shows, however, the influence on wireless inter-communication is trivial despite the control of in which the position of the transmitter and receiver are stationary. This is because of no changes in distance between a receiver and transmitter. As a result of this experiment, DTSR is 84% and 83% when is 1000 ms and 500 ms, respectively. Thus, we discover that DTSR is hardly affected by .
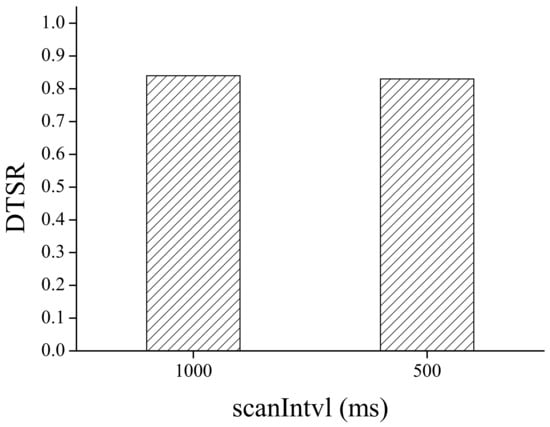
Figure 5.
versus DTSR.
Finally, Figure 6 describes the impact on DTSR when the communication distance is 5 m and is 1000 ms. In this experiment, we measure DTSR when the is decreased from 1000 to 100 ms. As a result, the average DTSR for every is about 79%, but no DTSR is a noteworthy difference for each . That is, almost has no effect on DTSR.
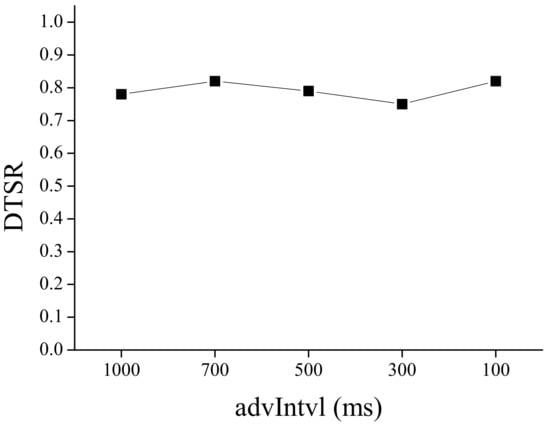
Figure 6.
versus DTSR.
Through these preliminary experiments, we have analyzed the effect on data transmission reliability in terms of communication with adjacent sensors from various angles, such as distance, , and . In summary, we find out that these factors have no big effect on the reliability of overhearing-based communication between sensors. Merely, there is a transmission error rate of around 20% in terms of DTSR for each result of every experiment. Nevertheless, the proposed scheme in the next section could overcome this communication problem via collaboration among sensors.
4.2. Enhanced Reliable Event Transport
This experiment aims to explore the impact of and on the reliability for data acquisition, ER and . In this experiment, we compare two communication manners, traditional BA and cRET. Figure 7 shows the time that it takes to achieve k when k is 1000. has a higher BA than cRET in all sections. In the case of BA, becomes longer as becomes shorter because the packet loss ratio increases. Unlike BA, in case of cRET, is 1000 in all sections without packet loss, since the collaboration scheme by overhearing increases the DTSR for data sent from a single sensor.
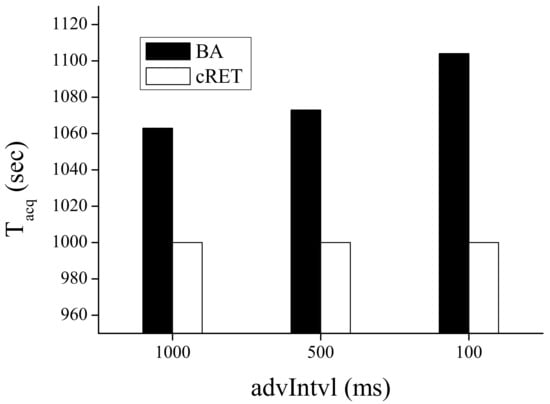
Figure 7.
versus .
Figure 8 describes the DTSR in each BA and cRET when with a different speed is passing by three sensors, , , and . The sensors s are evenly deployed in rows, and is a moving at constant speed. Commonly, in each communication manner, DTSR falls down as the speed of increases. This is because the time that is staying within a communication area of any decreases. In other words, we deduced the opportunity that is able to receive data from any . The most remarkable aspect in this figure is that cRET has a higher performance than BA at every speed, i.e., 3.6 km/h, 20 km/h, and 30 km/h. Especially, in the case of BA, DTSR is almost zero when it reaches 30 km/h. In addition, even at 3.6 km/h, the peak of DTSR is about 90%. There is no supplementation for transmission failure in any since the traditional BA without the overhearing technique only delivers its own data from to . In contrast, cRET has the effect of improving the reachability for data from to despite the fast movement of mobile devices compared to BA. This is because the data from one sensor are delivered to a through some adjacent sensors in terms of data flow.
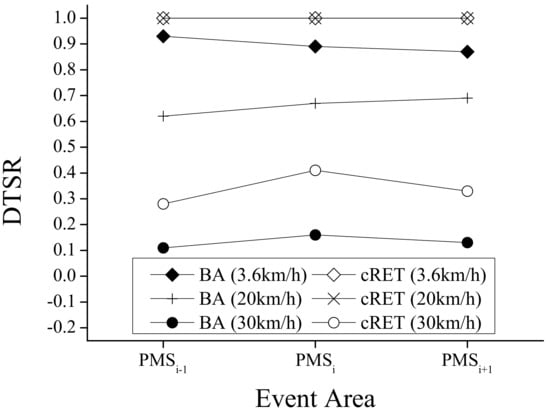
Figure 8.
versus .
Figure 9 illustrates the impact of and on for each communication manner when and are both 1000 ms. Similarly for both communication manners, is decreasing as is higher, regardless of . This is because DTSR decreases as the movement speed increases, as shown in Figure 3. That is, the number of sensory data received per is reduced. When is 1, the of both BA and cRET are similar to each other where is 3.6, 20, and 30 km/h. For each, the of cRET is always higher than that of BA, since cRET improves DTSR by the collaboration of sensors. However, in this case, both manners are not enough to satisfy k, which is given by the application operator. The mobility of prevents from having enough time for stable communication. Nevertheless, we confirm that could achieve k when is 10. In other words, the increasing is related to improving . This experiment was conducted under the assumption of an urban crowded area containing a lot of people, since there are many residents in an urban area. is achieved in every manner when is 3.6 km/h. However, in the case of BA, it is a decline in when is 20 km/h and more. Although increases, BA could not satisfy k as with a high moving speed. On the other hand, in the case of cRET, it satisfies k even if is 20 km/h and does not satisfy k when is 30 km/h.
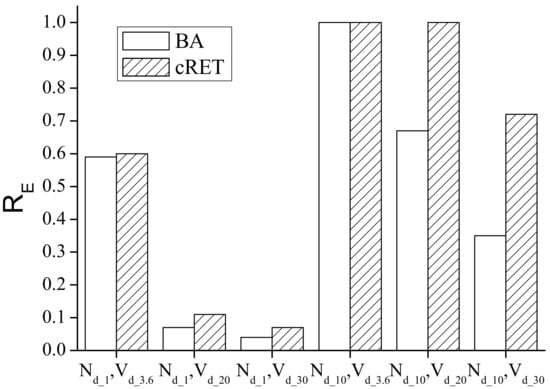
Figure 9.
, versus .
5. Conclusions and Future Work
In this paper, the collaborative data acquisition scheme is proposed to support a reliable transmission even where mobile devices having a high moving speed. The proof of concept is implemented with mobile devices and PM sensors. With respect to , cRET is 1.01 to 2.05 times higher than BA. Thus, the results demonstrate that cRET can be taken into consideration as a solution.
Furthermore, since the sensor exploited in our scheme operates on a battery, energy efficiency is a very important part to prolong the lifetime of sensors with overhearing. Therefore, in future work, the lifetime of each sensor will be improved. With this, the transmission range via overhearing could be expanded to increase transmission reliability. Moreover, this paper has conducted experiments in general environments where there are a number of wireless communication devices, such as Wi-Fi and Bluetooth, with diverse transmission power. However, in the city, there may be some areas with harsh environments where there are only many wireless devices that propagate signals with strong transmission power. In such harsh areas, signals could be attenuated or lost by frequent congestions and collisions. Thus, in future work, we need to satisfy the required transmission reliability even in harsh environments. This could improve the performance of cRET.
Author Contributions
Conceptualization, S.-H.K.; Data curation, T.Y.; Formal analysis, T.Y.; Funding acquisition, S.-H.K.; Methodology, S.P. and S.-H.K.; Project administration, S.-H.K.; Resources, T.Y.; Software, T.Y.; Supervision, S.P.; Visualization, T.Y. and S.P.; Writing—original draft, T.Y. and S.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the research fund of Chungnam National University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fuller, A.; Fan, Z.; Day, C.; Barlow, C. Digital Twin: Enabling Technologies, Challenges and Open Research. IEEE Access 2020, 8, 108952–108971. [Google Scholar] [CrossRef]
- Hu, X.; Yang, L.; Xiong, W. A Novel Wireless Sensor Network Frame for Urban Transportation. IEEE Internet Things J. 2015, 2, 586–595. [Google Scholar] [CrossRef]
- Zappatore, M.; Longo, A.; Bochicchio, M.A. Using mobile crowd sensing for noise monitoring in smart cities. In Proceedings of the 2016 International Multidisciplinary Conference on Computer and Energy Science (SpliTech), Split, Croatia, 13–15 July 2016. [Google Scholar]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers From a Modeling Perspective. IEEE Access 2020, 8, 21980–22012. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, K.; Zhang, Y. Digital Twin Networks: A Survey. IEEE Internet Things J. 2021, 8, 13789–13804. [Google Scholar] [CrossRef]
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Hou, Y.; Liu, Z.; Sun, D. A novel MAC protocol exploiting concurrent transmissions for massive LoRa connectivity. J. Commun. Netw. 2020, 22, 108–117. [Google Scholar] [CrossRef]
- Chen, M.; Yang, J.; Hu, L.; Hossain, M.S.; Muhammad, G. Urban Healthcare Big Data System Based on Crowdsourced and Cloud-Based Air Quality Indicators. IEEE Commun. Mag. 2018, 56, 14–20. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Duan, N.; Ji, P.; Ma, C.; Hu, F.; Ding, Y.; Yu, Y.; Zhou, Q.; Sun, W. A Crowdsource-Based Sensing System for Monitoring Fine-Grained Air Quality in Urban Environments. IEEE Internet Things J. 2019, 6, 3240–3247. [Google Scholar] [CrossRef]
- Lane, N.D.; Eisenman, S.B.; Musolesi, M.; Miluzzo, E.; Campbell, A.T. Urban sensing systems: Opportunistic or participatory? In Proceedings of the 9th Workshop on Mobile Computing Systems and Applications, Napa Valley, CA, USA, 25–26 February 2008; pp. 11–16. [Google Scholar]
- Yang, T.; Roh, H.; Han, J.; Park, S.; Kim, S.-H. Microscale Particulate Matter Monitoring With Reliable Event Transport in Urban Environments. IEEE Syst. J. 2020, 14, 3057–3060. [Google Scholar] [CrossRef]
- Kafi, M.A.; Djenouri, D.; Ben-Othman, J.; Badache, N. Congestion Control Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2014, 16, 1369–1390. [Google Scholar] [CrossRef]
- Mahmood, M.A.; Welch, I.; Andreae, P. Enhanced Event Reliability in Wireless Sensor Networks. In Proceedings of the 2018 IEEE 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018. [Google Scholar]
- Dutta, J.; Chowdhury, C.; Roy, S.; Middya, A.I.; Gazi, F. Towards Smart City: Sensing Air Quality in City Based on Opportunistic Crowd-Sensing. Assoc. Comput. Mach. 2017, 42, 1–6. [Google Scholar]
- Tsuchiya, Y.; Ishikawa, N. Mobile Crowdsensing from Sensor Devices Using Bluetooth Low Energy (BLE). In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 12–14 December 2018. [Google Scholar]
- Kim, C.; Kim, S.; Jung, K. Adaptive Flow Control Using Movement Information in Mobile-Assisted Sensor Data Collection. IEEE Sens. J. 2020, 20, 12435–12446. [Google Scholar] [CrossRef]
- Montanari, A.; Nawaz, S.; Mascolo, C.; Sailer, K. A Study of Bluetooth Low Energy Performance for Human Proximity Detection in the Workplace. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications (PerCom), Kona, HI, USA, 13–17 March 2017. [Google Scholar]
- Huang, K.; He, K.; Du, X. A Hybrid Method to Improve the BLE-Based Indoor Positioning in a Dense Bluetooth Environment. Sensors 2019, 19, 424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).