
Cross-Layer Optimization Spatial Multi-Channel Directional Neighbor Discovery with Random Reply in mmWave FANET

Abstract
:1. Introduction
- In FANETs, neighbor discovery is the basis for self-organization, as well as a precondition for routing and resource allocation. In FANETs, each UAV node needs to discover its neighbors in a 3D space. This brings difficulties to discover neighbors in itself;
- In contrast to lower communication frequencies, the path loss in the mmWave band is much higher at the same distance. To ensure the connectivity of the links, the antenna major lobe beam with the mmWave band tends to be narrower for D2D (Device-to-Device) communication at the same communication distance;
- The two reasons above bring up that the neighbor discovery algorithm of FANETs based on mmWave needs to solve the problem of scanning a larger spatial range with a narrower beam. This makes the neighbor discovery process inevitably slower, especially in asynchronous FANETs.
- A 3D spatial scanning method combining the PHY layer and MAC layer is proposed. Under the condition of a closed physical layer link, the matching mode of mmWave antenna beamwidth is optimized, and the spatial scanning time is fully reduced through cross-layer optimization design.
- A space division multi-channel reply mechanism based on mmWave narrow beam is proposed. By increasing the number of reply channels existing at the same time in 3D space, the efficiency of the neighbor discovery algorithm is improved and the neighbor discovery time is greatly shortened.
- Furthermore, two different reply mechanisms of fixed reply and random reply are given, the average convergence time of neighbor discovery time under the two reply mechanisms is derived, and the optimization strategies under different conditions are given.
2. System Model
2.1. Network and Node Model
2.2. Bi-Directional Communication Conditions
- Wide transmission and narrow reception ().The larger is, the more time is needed for a node to scan the same area, in order to ensure that the receiving node has enough time to receive a complete beacon frame.
- Narrow transmission and wide reception ().The larger is, the more sectors are needed to scan when sending node broadcasts the packets.
- Symmetric transmission and reception ().Although both and are smaller than the above, there is the problem that nodes need more time to point at each other in neighbor discovery.
- ∗
- PHY layer: Considering the symmetric channel, the two links of the transmit node i and the receive node , as well as the transmit node j and the receive node . Taking as an example, it needs to satisfy: , where is the path loss between node i and node j. The formula above indicates that the physical layer link establishment condition of node i and node j is that the receive power must be greater than the receiving sensitivity requirement.
- ∗
- MAC layer: If nodes i and j want to successfully establish a link between them in both directions and , it is necessary for node i and node j to use the correct transmit and receive antennas pointing at each other, as shown in Figure 4a. Figure 4b shows that the MAC layer also needs to solve the multi-node collision problem within the same coverage area, because of the fact that all cluster members in the network are one-hop neighbor nodes after passing through the cluster head as described above.
2.3. Cross-Layer Optimization Method
- Time is divided into time slots, but it does not mean that all nodes have perfect time synchronization;
- Communication is in half-duplex mode, which means a node cannot transmit and receive simultaneously;
- The node does not rotate since the pointing relation of directional antennas of two nodes will be greatly changed when the nodes rotate.
3. Cross-Layer Based Spatial Multi-Channel Directional Neighbor Discovery with Random Reply (CSM-RR) Algorithm
- Beacon dispatch based on the scan.
- Random reply mechanism based on the dynamic reserved slot.
3.1. Beacon Dispatch Based on Scanning
3.2. Random Reply Mechanism Based on Dynamic Reserved Slot
- The start time of the reply phase by cluster members;
- The number of time slots reserved for the reply phase of cluster members of the current round;
- The number of cluster members that have been discovered.
| Algorithm 1 Random reply algorithm in cluster head. |
| During the dispatch stage: |
| while do |
| select the sector |
| broadcast the beacon for slots |
| end while |
| During the randomly reply stage: |
| while do |
| if then |
| while do |
| select the sector |
| encapsule the neighbor list into HELLO packet |
| encapsule the into HELLO packet |
| broadcast the HELLO packet for 1 slot |
| end while |
| end if |
| if then |
| if received a REPLY packet then |
| add the identity to the neighbor list |
| end if |
| end if |
| end while |
| Algorithm 2 Random reply algorithm in cluster member. |
| During the dispatch stage: |
| while has not received the beacon do |
| change the active sector |
| listening |
| end while |
| point at the cluster head and lock the sector |
| During the randomly reply stage: |
| if has received the HELLO packet then |
| if neighbor list has self-identity then |
| else |
| transmit the REPLY packet in s slot with probability |
| end if |
| end if |
4. Simulation Results and Discussion
4.1. Comparison with Existing Methods
4.2. Ablation Experiment
- The antennas’ collection of “wide transmission and narrow reception” works better with multi-channel.
- It is necessary to increase the reply packets sent by each round of cluster members as much as possible under a certain collision probability, which is .
- On the premise of ensuring the neighbor discovery rate, it is necessary to reduce in each round as much as possible. According to the above simulation results, the time required to discover all cluster members is the shortest with .
- The distribution of nodes also affects the protocol proposed in this paper. When the distribution of cluster members obeys uniform distribution, the efficiency of the random reply mechanism is the highest.
5. Conclusions
- The CSM-RR does not need to use the 2.4-GHz band with the omnidirectional in neighbor discovery. Therefore, the UAVs do not need additional transceivers and antennas, which will not cause link asymmetry due to different antenna gains.
- It also does not require a perfect time synchronization system to achieve initial synchronization of time slots during beacon dispatch. The UAVs do not need additional hardwares or GPS support thus reducing hardware complexity.
- The “Hidden terminal” and “deafness” problems do not arise because the CSM-RR is TDMA based.
- In addition to using the fixed reply mechanism in the case of few nodes, the CSM-RR adopts the random reply mechanism. When there are few nodes, the reply time slot of each node is very easy to plan. Therefore, the collisions do not occur.
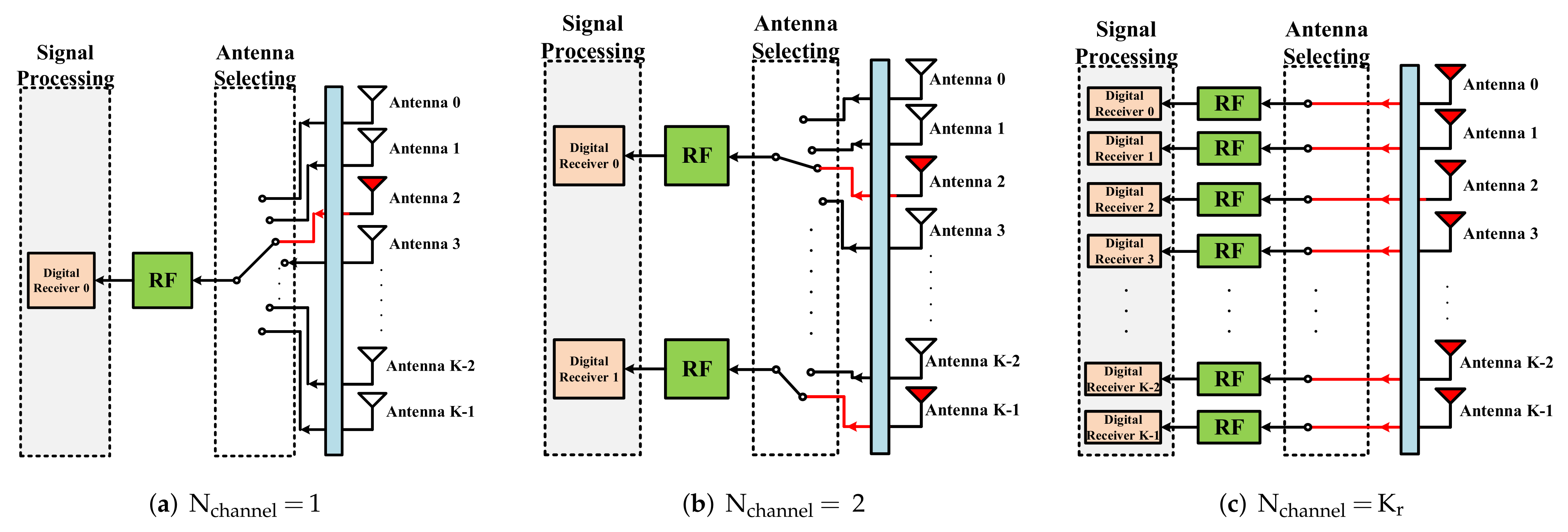
- Since the CSM-RR uses a digital receiver, multiple channels can be used for simultaneous reception without adding additional hardware overhead. Without adding additional hardware, the CSM-RR greatly improves the efficiency of neighbor discovery.
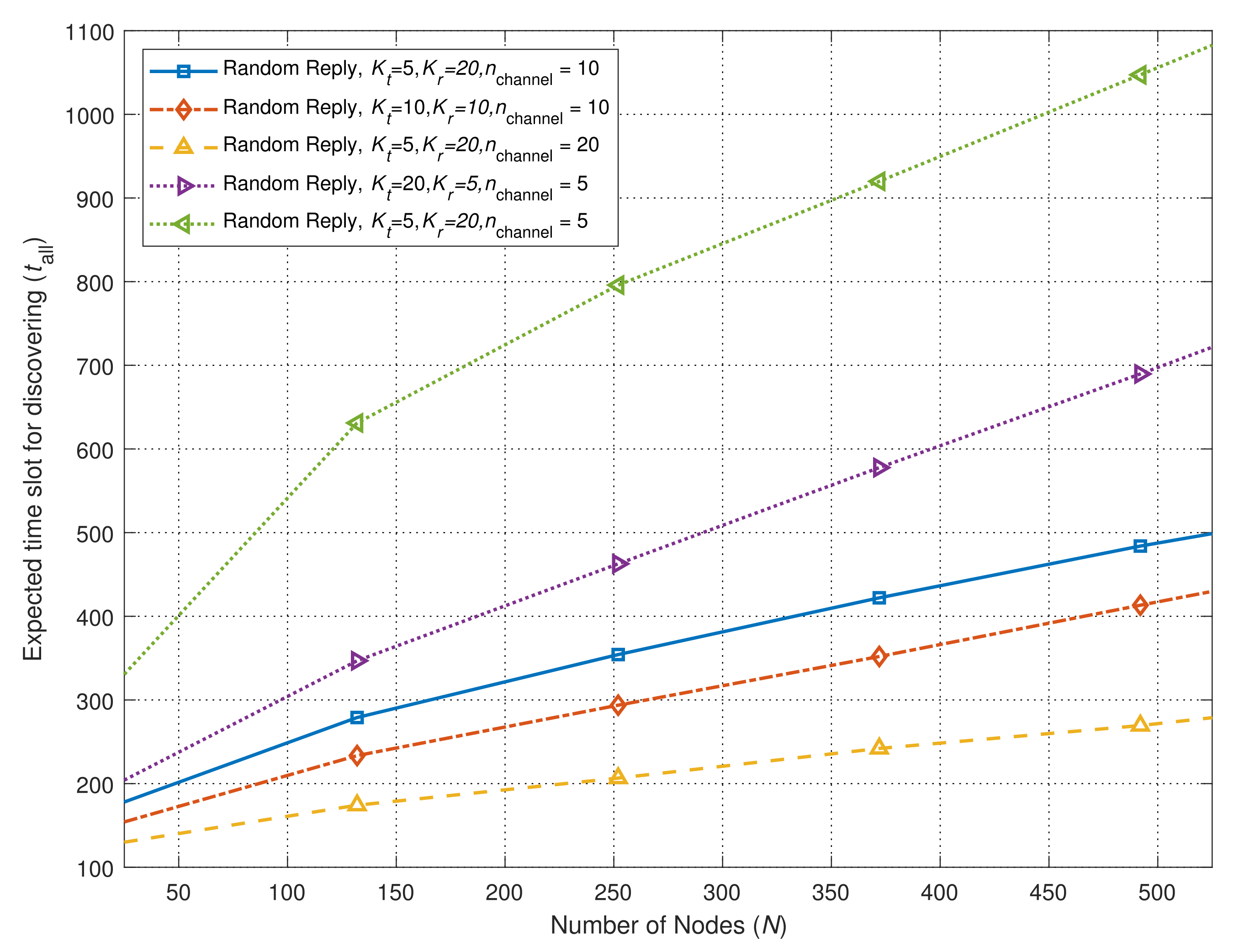
- By optimizing , the neighbor discovery time can be further reduced when the number of nodes is large. Simulations have shown that as the network scale is 100 to 500 nodes, the convergence time is 10 times higher than that of the single channel algorithm.
Author Contributions
Funding
Conflicts of Interest
References
- Xiao, Z.; Zhu, L.; Liu, Y.; Yi, P.; Zhang, R.; Xia, X.G.; Schober, R. A Survey on Millimeter-Wave Beamforming Enabled UAV Communications and Networking. IEEE Commun. Surv. Tutor. 2021, 24, 557–610. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Urama, J.; Wiren, R.; Galinina, O.; Kauppi, J.; Hiltunen, K.; Erkkila, J.; Chernogorov, F.; Etelaaho, P.; Heikkila, M.; Torsner, J.; et al. UAV-Aided Interference Assessment for Private 5G NR Deployments: Challenges and Solutions. IEEE Commun. Mag. 2020, 58, 89–95. [Google Scholar] [CrossRef]
- Lin, J.; Cai, W.; Zhang, S.; Fan, X.; Guo, S.; Dai, J. A Survey of Flying Ad-Hoc Networks: Characteristics and Challenges. In Proceedings of the 2018 Eighth International Conference on Instrumentation Measurement, Computer, Communication and Control (IMCCC), Harbin, China, 19–21 July 2018; pp. 766–771. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative Routing Problem for Ground Vehicle and Unmanned Aerial Vehicle: The Application on Intelligence, Surveillance, and Reconnaissance Missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Xiao, M.; Mumtaz, S.; Huang, Y.; Dai, L.; Li, Y.; Matthaiou, M.; Karagiannidis, G.K.; Björnson, E.; Yang, K.; I, C.L.; et al. Millimeter Wave Communications for Future Mobile Networks. IEEE J. Sel. Areas Commun. 2017, 35, 1909–1935. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter Wave Communication: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Uwaechia, A.N.; Mahyuddin, N.M. A Comprehensive Survey on Millimeter Wave Communications for Fifth-Generation Wireless Networks: Feasibility and Challenges. IEEE Access 2020, 8, 62367–62414. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A Survey on 5G Millimeter Wave Communications for UAV-Assisted Wireless Networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Niu, Y.; Li, Y.; Jin, D.; Su, L.; Vasilakos, A.V. A survey of millimeter wave communications (mmWave) for 5G: Opportunities and challenges. Wirel. Netw. 2015, 21, 2657–2676. [Google Scholar] [CrossRef]
- Yang, A.; Li, B.; Yan, Z.; Yang, M. A Bi-Directional Carrier Sense Collision Avoidance Neighbor Discovery Algorithm in Directional Wireless Ad Hoc Sensor Networks. Sensors 2019, 19, 2120. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, H.; Kim, Y.; Song, T.; Pack, S. Multiband Directional Neighbor Discovery in Self-Organized mmWave Ad Hoc Networks. IEEE Trans. Veh. Technol. 2015, 64, 1143–1155. [Google Scholar] [CrossRef]
- Nur, F.N.; Sharmin, S.; Habib, M.A.; Razzaque, M.A.; Islam, M.S.; Almogren, A.; Hassan, M.M.; Alamri, A. Collaborative neighbor discovery in directional wireless sensor networks: Algorithm and analysis. Eurasip J. Wirel. Commun. Netw. 2017, 2017, 119. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Li, B. Neighbor discovery in mobile ad hoc self-configuring networks with directional antennas: Algorithms and comparisons. IEEE Trans. Wirel. Commun. 2008, 7, 1540–1549. [Google Scholar] [CrossRef]
- Bai, W.; Xu, Y.; Wang, J.; Xu, R.; Anpalagan, A.; Chen, C.; Xu, Y.; Wang, X. Cognitive Neighbor Discovery With Directional Antennas in Self-Organizing IoT Networks. IEEE Internet Things J. 2021, 8, 6865–6877. [Google Scholar] [CrossRef]
- Liu, B.; Rong, B.; Hu, R.Q.; Qian, Y. Neighbor discovery algorithms in directional antenna based synchronous and asynchronous wireless ad hoc networks. IEEE Wirel. Commun. 2013, 20, 106–112. [Google Scholar] [CrossRef]
- Bilgin, Y.A.; Yılmaz, A.O. Neighbor discovery in network with directional antennas. In Proceedings of the 2013 21st Signal Processing and Communications Applications Conference (SIU), Haspolat, Turkey, 24–26 April 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Vasudevan, S.; Kurose, J.; Towsley, D. On neighbor discovery in wireless networks with directional antennas. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; Volume 4, pp. 2502–2512. [Google Scholar] [CrossRef] [Green Version]
- Cai, H.; Wolf, T. On 2-way neighbor discovery in wireless networks with directional antennas. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 702–710. [Google Scholar] [CrossRef]
- Chen, L.; Li, Y.; Vasilakos, A.V. On Oblivious Neighbor Discovery in Distributed Wireless Networks with Directional Antennas: Theoretical Foundation and Algorithm Design. IEEE/ACM Trans. Netw. 2017, 25, 1982–1993. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, B.; Gui, L. Adaptive Scan-based Asynchronous Neighbor Discovery in wireless networks using directional antennas. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 24–26 October 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Sivanantham, E.; Ramakrishnan, M. Energy-efficient sustainable cluster based neighbor discovery technique for wireless networks with directional antennas. Clust. Comput.-J. Netw. Softw. Tools Appl. 2017, 20, 1527–1534. [Google Scholar] [CrossRef]
- Wang, Y.; Mao, S.; Rappaport, T.S. On Directional Neighbor Discovery in mmWave Networks. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 1704–1713. [Google Scholar] [CrossRef]
- Cai, H.; Liu, B.; Gui, L.; Wu, M.Y. Neighbor discovery algorithms in wireless networks using directional antennas. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 767–772. [Google Scholar] [CrossRef]
- Tarnai, T. The observed form of coated vesicles and a mathematical covering problem. J. Mol. Biol. 1991, 218, 485–488. [Google Scholar] [CrossRef]
- Leopardi, P. A partition of the unit sphere into regions of equal area and small diameter. Electron. Trans. Numer. Anal. 2006, 25, 2006. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Feature | Years | Reference |
|---|---|---|---|
| BD-SBA | The link layer is based on IEEE 802.11. Carrier sense of the BD-SBA algorithm is performed in the first broadcast step which can reduce the collision of broadcasting the scanning request frames. | 2019 | [12] |
| MDND | Use the 2.4-GHz band with the omnidirectional antennas.The data transmissions are performed by using the 60-GHz band with directional antennas. | 2015 | [13] |
| Gossip-Based Algorithm | Nodes gossip about their neighbors’ location information to accelerate the discovery. However, the synchronous algorithms need additional hardware or GPS support. | 2005 | [19] |
| 1-way ND | Each device periodically transmits advertisement messages to announce its neighbors. When the neighbors receive the advertisement information, it determines that the neighbor discovery is successful. | 2015 | [20] |
| 2-way ND | Once a device receives an advertisement message, it provides an active response to its neighbor. This allows neighbor nodes to discover each other. | 2015 | [20] |
| I-SBA | An extra mode named ‘idle’ is added in every time slot. When the node receives a new advisement information successfully, it will not always respond but with probability p. | 2012 | [25] |
| PRA | Send HELLO packets with probability p at the beginning of each time slot in a random direction, which makes all nodes transmit and receive in different directions that decreases the collision probability. | 2008 | [15] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Zeng, L.; Liu, Z.; Song, Z.; Zeng, J.; An, J. Cross-Layer Optimization Spatial Multi-Channel Directional Neighbor Discovery with Random Reply in mmWave FANET. Electronics 2022, 11, 1566. https://doi.org/10.3390/electronics11101566
Song Y, Zeng L, Liu Z, Song Z, Zeng J, An J. Cross-Layer Optimization Spatial Multi-Channel Directional Neighbor Discovery with Random Reply in mmWave FANET. Electronics. 2022; 11(10):1566. https://doi.org/10.3390/electronics11101566
Chicago/Turabian StyleSong, Yifei, Liang Zeng, Zeyu Liu, Zhe Song, Jie Zeng, and Jianping An. 2022. "Cross-Layer Optimization Spatial Multi-Channel Directional Neighbor Discovery with Random Reply in mmWave FANET" Electronics 11, no. 10: 1566. https://doi.org/10.3390/electronics11101566
APA StyleSong, Y., Zeng, L., Liu, Z., Song, Z., Zeng, J., & An, J. (2022). Cross-Layer Optimization Spatial Multi-Channel Directional Neighbor Discovery with Random Reply in mmWave FANET. Electronics, 11(10), 1566. https://doi.org/10.3390/electronics11101566