
A Proposed Waiting Time Algorithm for a Prediction and Prevention System of Traffic Accidents Using Smart Sensors



Abstract
:1. Introduction
- We proposed a system to prevent traffic accidents by using intelligent algorithms to determine the sections where roads are bound to close due to traffic accidents and construction sites;
- We performed traffic data processing by calculating the optimal traffic cycle using a neural network;
- We improved the accuracy of prediction by combining the C4.5 algorithm with a neural network algorithm;
- We compared the results with existing algorithms for determining weather conditions such as heavy snow, fog, and freeze, and the resulting traffic accidents.
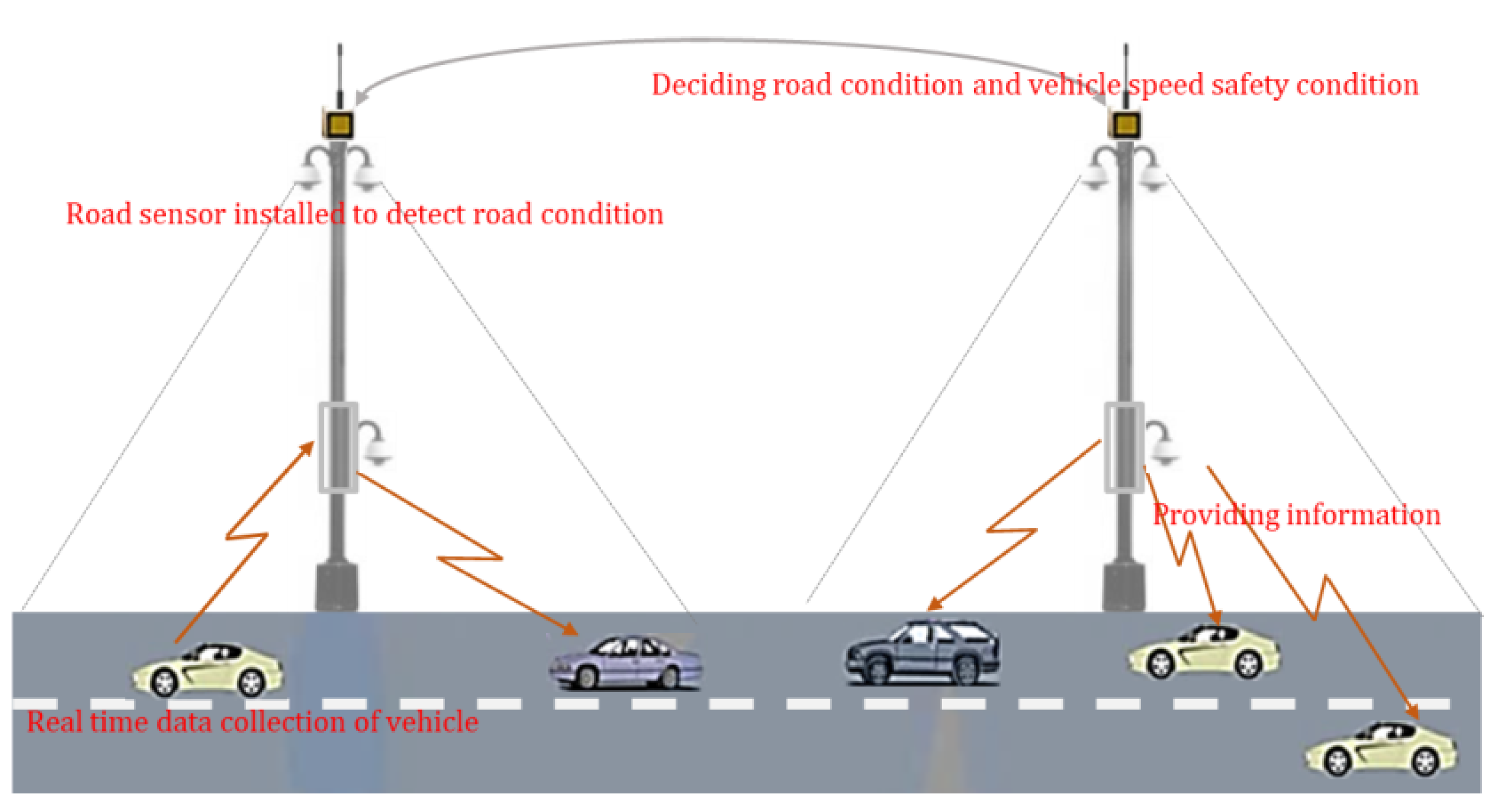
2. Traffic Data Collection Using Electronic Tags
3. Road Information Analysis via an Intelligent Sensor Network
| Algorithm 1: Traffic accident prevention algorithm |
| INPUT: |
| int safety = max (st_path- > d_curve0, st_path- > d_curve1); |
| int length = max (st_path- > distance0, st_path- > distance); |
| int capacity = MAX (st_path- > capt0, st_path- > - > capt1); |
| intcan_work = MAX (st_path- > work0, st_path- > work1); |
| /* Read Traffic Conditions */ |
| for (y = 0; y < min (trf_condition, distance); y++) |
| for (y = 0; y < MIN (trf_condition, distance); y++) |
| { |
| traffic_con (capacity, buf1 [distance0]); |
| traffic_con (capacity, buf2 [distance1]); |
| /* extract the sets from the fuzzy values */ |
| Ax = f1- > x; |
| Ay = f1- > y; |
| Adistance = f1- > n; |
| Bx = f2- > x; |
| Ay = f2- > y; |
| Bdistance = f2- > n; |
| if (Alength == 1 andand Blength == 1) |
| { |
| if (Ay [0] < By [0]) |
| { |
| if (DoIntersect) * intersectionSet = CopyFuzzyValue (f1); |
| return(Ay [01]); |
| } |
| else |
| { |
| if (DoIntersect) * intersectionSet = CopyFuzzyValue (f1); |
| return (Ay [01]; |
| } |
| else |
| { |
| if (DoIntersect) * intersectionSet = CopyFuzzyValue (f2); |
| Return (By [0]); |
| } |
| } |
| if (Alength == 1) |
| { |
| max = By [0]; |
| for (i = 1; i < Bdistance; i++) |
| if (By [i] > max) max = By [i]; |
| if (max < Ay [0]) |
| { |
| if (DoIntersection) * intersectionSet = CopyFuzzyValue (f2); |
| } |
| else |
| { |
| max = Ay [0]; |
| if (DoIntersection) * intersectionSet = horizontal_intersection (f2, max); |
| } |
| return (max); |
| } |
| if (Blength == 1) |
| { |
| max = Ay [0]; |
| for (i = 1; i < Adistance; i++) |
| if (Ay [i] > max) = Ay [i]; |
| if (max < By [0]) |
| { |
| if (DoIntersection) * intersectionSet = CopyFuzzyValue (f1); |
| } |
| else |
| if (nrandom == YES) |
| if (n_c < 3) |
| nfval++; |
| switch (n_c) |
| { |
| case 0: /* small car */ |
| { |
| ncar [0]++ |
| break; |
| } |
| case 1: /* medium car */ |
| { |
| ncar [1]++; |
| break; |
| } |
| case 2: /* large car */ |
| { |
| ncar [2]++; |
| break; |
| } |
| /* check for traffic condition */ |
| if ((pass1 + pass2) > 140) |
| { |
| weight = random (5000) + 25,000; |
| outtextxy (48,090, “High Capacity.”); |
| } |
| else if ((pass1 + pass2) > 130 |
| { |
| weight = random (5000) + 22,500; |
| outtextxy (48,090, “LOW Capacity.”); |
| } |
| else if ((pass1 + pass2) > 120) |
| { |
| weight = random (5000) + 17,500; |
| outtextxy (48,090, “Middle Capacity.”); |
| } |
| else if ((pass1 + pass2) > 100) |
| { |
| weight = random (5000) + 12,500; |
| outtextxy (48,090, “High Speed”); |
| } |
| else if ((pass1 + pass2) > 80) |
| { |
| weight = random (5000) + 7500; |
| outtextxy (48,090, “Middle Capacity.”); |
| } |
| else |
| { |
| weight = random (8000); |
| outtextxy (48,090, “Low speed”); |
| } |
| sprintf (buffer3, “%d”, weight); |
| outtextxy (55,075, buffer3); |
| OUTPUT |
4. Combining Fault Section and Self-Learning Models
4.1. Value of Sensors
4.2. Status of Groups
4.3. Model Status
4.4. Computational Analysis Summary
5. Comparison with Other Works
6. Parameters for Improving the Traffic Flow
6.1. Time—Spatial Image Generation
6.2. Counting of Vehicles and Night Counting Errors
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Singh, H.; Gupta, M.M.; Meitzler, T.; Hou, Z.G.; Garg, K.K.; Solo, A.M.G.; Zadeh, L.A. Real-life applications of fuzzy logic. Adv. Fuzzy Syst. 2013, 2013, 581879. [Google Scholar] [CrossRef]
- Kanestrøm, P.Ø. Traffic Flow Forecasting with Deep Learning. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Barros, J.; Araujo, M.; Rossetti, R.J.F. Short-term real-time traffic prediction methods: A survey. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 132–139. [Google Scholar]
- Affonso, C.; Sassi, R.J.; Ferreira, R.P. Traffic flow breakdown prediction using feature reduction through rough-neuro fuzzy networks. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 1943–1947. [Google Scholar]
- Chan, K.Y.; Dillon, T.S.; Singh, J.; Chang, E. Neural-network-based models for short-term traffic flow forecasting using a hybrid exponential smoothing and levenberg–marquardt algorithm. IEEE Trans. Intell. Transp. Syst. 2011, 13, 644–654. [Google Scholar] [CrossRef]
- Dunne, S.; Ghosh, B. Weather adaptive traffic prediction using neuro wavelet models. IEEE Trans. Intell. Transp. Syst. 2013, 14, 370–379. [Google Scholar] [CrossRef]
- Tso, G.K.F.; Yau, K.K.W. Predicting electricity energy consumption: A comparison of regression analysis, decision tree and neural networks. Energy 2007, 32, 1761–1768. [Google Scholar] [CrossRef]
- Holmstrom, L.; Koistinen, P.; Jorma, L.E. Neural and statistical classifiers-taxonomy and two case studies. IEEE Trans. Neural Netw. 1997, 8, 5–17. [Google Scholar] [CrossRef]
- Tong, W.; Hong, H.; Fang, H.; Xie, Q.; Perkins, R. Decision forest: Combining the predictions of multiple independent decision tree models. J. Chem. Inf. Comput. Sci. 2003, 43, 525–531. [Google Scholar] [CrossRef]
- Spek, A.C.E.; Wieringa, P.A.; Janssen, W.H. Intersection approach speed and accident probability. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 155–171. [Google Scholar] [CrossRef]
- Lee, D.N. A theory of visual control of braking based on information about time-to-collision. Perception 1976, 5, 437–459. [Google Scholar] [CrossRef]
- Olson, P.L. Forensic Aspects of Driver Perception and Response; Lawyers & Judges Publishing Company, Inc.: Tucson, AZ, USA, 1996. [Google Scholar]
- Hancock, P.A.; Caird, J.K.; Shekhar, S.; Vercruyssen, M. Factors influencing drivers’ left turn decisions. In Proceedings of the Human Factors Society Annual Meeting, San Francisco, CA, USA, 2–6 September 1991; SAGE Publications Sage CA: Los Angeles, CA, USA, 1991; Volume 35, pp. 1139–1143. [Google Scholar]
- Staplin, L. Simulator and field measures of driver age differences in left-tum gap judgments. Transp. Res. Rec. 1995, 1485, 49–55. [Google Scholar]
- Alexander, J.; Barham, P.; Black, I. Factors influencing the probability of an incident at a junction: Results from an interactive driving simulator. Accid. Anal. Prev. 2002, 34, 779–792. [Google Scholar] [CrossRef]
- Moser, A.; Steffan, H.; Spek, A.; Makkinga, W. Application of the Montecarlo Methods for Stability Analysis within the Accident Reconstruction Software Pc-Crash; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2003. [Google Scholar]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Kumar, P.M.A.; Vaidehi, V. A transfer learning framework for traffic video using neuro-fuzzy approach. Sadhana 2017, 42, 1431–1442. [Google Scholar] [CrossRef]
- Venkata, R.N.; Seravana, K.P.V.M.; Puvvada, N. Analytic architecture to overcome real time traffic control as an intelligent transportation system using big data. Int. J. Eng. Technol. 2018, 7, 2–18. [Google Scholar]
- Cybenko, G. Approximation by superpositions of a sigmoidal function. Math. Control Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Fahlman, S.E.; Lebiere, C. The Cascade-Correlation Learning Architecture; Technical Report; Carnegie-Mellon University Pittsburgh pa School of Computer Science: Pittsburgh, PA, USA, 1990. [Google Scholar]
- Goel, A.L. Software reliability models: Assumptions, limitations, and applicability. IEEE Trans. Softw. Eng. 1985, 12, 1411–1423. [Google Scholar] [CrossRef]
- Jha, S.; Nkenyereye, L.; Joshi, G.P.; Yang, E. Mitigating and monitoring smart city using internet of things. CMC-Comput. Mater. Contin. 2020, 65, 1059–1079. [Google Scholar] [CrossRef]
- Rangwala, S.; Liang, S.; Dornfeld, D. Pattern recognition of acoustic emission signals during punch stretching. Mech. Syst. Signal Process. 1987, 1, 321–332. [Google Scholar] [CrossRef]
- Prateepasen, A.; Au, Y.H.J.; Jones, B.E. Acoustic emission and vibration for tool wear monitoring in single-point machining Internationalusing belief network. In Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference (IMTC 2001), Rediscovering Measurement in the Age of Informatics (Cat. No. 01CH 37188), Budapest, Hungary, 21–23 May 2001; Volume 3, pp. 1541–1546. [Google Scholar]
- Isermann, R.; Ayoubi, M.; Konrad, H.; Reiss, T. Model based detection of tool wear and breakage for machine tools. In Proceedings of the IEEE Systems Man and Cybernetics Conference-SMC, Le Touquet, France, 17–20 October 1993; Volume 3, pp. 72–77. [Google Scholar]
- Colbaugh, R.; Glass, K. Real-time tool wear estimation using recurrent neural networks. In Proceedings of the Tenth International Symposium on Intelligent Control, Minneapolis, MN, USA, 22–28 April 1996; pp. 357–362. [Google Scholar]
- Tan, K.; Huang, S.; Lee, T.H. Fault detection and diagnosis using neural network design. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2006; pp. 364–369. [Google Scholar]
- Liu, Y.; Yang, Y.; Lv, X.; Wan, L. A self-learning sensor fault detection framework for industry monitoring iot. Math. Probl. Eng. 2013, 2013, 712028. [Google Scholar] [CrossRef]
- Dong, C.; Shao, C.; Li, J.; Xiong, Z. An improved deep learning model for traffic crash prediction. J. Adv. Transp. 2018, 2018, 3869106. [Google Scholar] [CrossRef]
- Kamesh, D.B.K.; Sumadhuri, D.S.K.; Sahithi, M.S.V.; Sastry, J.K.R. An efficient architectural model for building cognitive expert system related to traffic management in smart cities. J. Eng. Appl. Sci. 2017, 12, 2437–2445. [Google Scholar]
- Principe, J.C.; Euliano, N.R.; Lefebvre, W.C. Neural and Adaptive Systems: Fundamentals through Simulations; Wiley: New York, NY, USA, 2000; Volume 672. [Google Scholar]
- Chong, M.M.; Abraham, A.; Paprzycki, M. Traffic accident analysis using decision trees and neural networks. arXiv 2004, arXiv:cs/0405050. [Google Scholar]
- Musharraf, M.; Smith, J.; Khan, F.; Veitch, B. Identifying route selection strategies in offshore emergency situations using decision trees. Reliab. Eng. Syst. Saf. 2020, 194, 106179. [Google Scholar] [CrossRef]
- Kunt, M.M.; Aghayan, I.; Noii, N. Prediction for traffic accident severity: Comparing the artificial neural network, genetic algorithm, combined genetic algorithm and pattern search methods. Transport 2011, 26, 353–366. [Google Scholar] [CrossRef]
- Sony, B.; Chakravarti, A.; Reddy, M.M. Traffic congestion detection using whale optimization algorithm and multisupport vector machine. In Proceedings of the International Conference on Advances in Civil Engineering (ICACE-2019), Kuala Lumpur, Malaysia, 21–23 March 2019; Volume 7, pp. 589–593. [Google Scholar]
- Naseer, A.; Nour, M.K.; Alkazemi, B.Y. Towards deep learning based traffic accident analysis. In Proceedings of the 2020 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 817–820. [Google Scholar]
- Prashar, D.; Jha, N.; Jha, S.; Joshi, G.P.; Seo, C. Integrating iot and blockchain for ensuring road safety: An unconventional approach. Sensors 2020, 20, 3296. [Google Scholar] [CrossRef] [PubMed]
- Appathurai, A.; Sundarasekar, R.; Raja, C.; Alex, E.J.; Palagan, C.A.; Nithya, A. An efficient optimal neural network based moving vehicle detection in traffic video surveillance system. Circuits Syst. Signal Process. 2020, 39, 734–756. [Google Scholar] [CrossRef]
- Amiruddin, A.A.A.M.; Haslinda, Z.; Taqvi, S.A.A.; Tufa, L.D. Neural network applications in fault diagnosis and detection: An overview of implementations in engineering-related systems. Neural Comput. Appl. 2020, 32, 447–472. [Google Scholar] [CrossRef]
- Jha, S.; Seo, C.; Yang, E.; Joshi, G.P. Real time object detection and trackingsystem for video surveillance system. Multimed. Tools Appl. 2021, 80, 3981–3996. [Google Scholar] [CrossRef]
- Fragkos, G.; Apostolopoulos, P.A.; Tsiropoulou, E.E. ESCAPE: Evacuation strategy through clustering and autonomous operation in public safety systems. Future Internet 2019, 11, 20. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| INPUT | NODE 1–2 REDUCE | NODE 1–2 EXTENSION | NODE 3–4 REDUCE | NODE 3–4 EXTENSION | NODE 5–6 REDUCE | NODE 5–6 EXTENSION | NODE 7–8 REDUCE | NODE 7–8 EXTENSION | NODE 9–10 REDUCE | NODE 9–10 EXTENSION |
|---|---|---|---|---|---|---|---|---|---|---|
| SATURATION UP BIG | BIG | SMALL | MED | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL |
| SATURATION UP SMALL | BIG | SMALL | BIG | SMALL | MED | SMALL | BIG | SMALL | BIG | MED |
| PASSING UP SMALL | SMALL | SMALL | BIG | SMALL | BIG | MED | BIG | SMALL | BIG | SMALL |
| PASSING UP SMALL | BIG | MED | BIG | MED | MED | SMALL | BIG | MED | BIG | SMALL |
| SATURATION DN SMALL | BIG | SMALL | MED | SMALL | BIG | MED | BIG | SMALL | BIG | MED |
| SATURATION DN BIG | SMALL | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL |
| PASSING DN SMALL | BIG | MED | BIG | MED | MED | SMALL | BIG | MED | BIG | SMALL |
| PASSING DN BIG | SMALL | BIG | MED | SMALL | BIG | MED | BIG | SMALL | BIG | MED |
| PASSING PCU | MED | SMALL | BIG | BIG | BIG | SMALL | BIG | SMALL | BIG | SMALL |
| SPEED AND LENGTH DN | MED | MED | BIG | SMALL | MED | SMALL | BIG | MED | BIG | SMALL |
| SPEED AND LENGTH UP | MED | SMALL | BIG | SMALL | BIG | MED | BIG | SMALL | BIG | MED |
| SPILLBACK DOWN | MED | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL |
| SPILLABCK UP | BIG | SMALL | BIG | SMALL | BIG | SMALL | MED | SMALL | BIG | SMALL |
| DELAY UP | LOW | HIGH | MED | SMALL | MED | SMALL | MED | MED | MED | SMALL |
| DELAY DN | BIG | SMALL | BIG | SMALL | MED | SMALL | BIG | SMALL | MED | MED |
| LANES UP | BIG | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL | BIG | SMALL |
| LANES DN | MED | BIG | MED | MED | MED | MED | MED | MED | MED | SMALL |
| BLOCK AREA | SMALL | SMALL | SMALL | SMALL | MED | SMALL | MED | SMALL | MED | SMALL |
| PHASE-1 UP | SMALL | BIG | MED | SMALL | MED | SMALL | MED | SMALL | MED | SMALL |
| PHASE-1 DN | BIG | BIG | BIG | MED | BIG | MED | BIG | MED | MED | MED |
| Optimal green time considering interlocking | |
| Number of passing vehicles | |
| Lane compensation factor | |
| Set-off delay time | |
| Intersection type compensation time | |
| Passenger car standby time | |
| Predicted green time (Probability of Green Time) | |
| Predicted yellow time (Probability of Yellow Time) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, S.; Shrestha, B.; Salah, B.; Ullah, I.; Salem, N.M. A Proposed Waiting Time Algorithm for a Prediction and Prevention System of Traffic Accidents Using Smart Sensors. Electronics 2022, 11, 1765. https://doi.org/10.3390/electronics11111765
Cho S, Shrestha B, Salah B, Ullah I, Salem NM. A Proposed Waiting Time Algorithm for a Prediction and Prevention System of Traffic Accidents Using Smart Sensors. Electronics. 2022; 11(11):1765. https://doi.org/10.3390/electronics11111765
Chicago/Turabian StyleCho, Seongsoo, Bhanu Shrestha, Bashir Salah, Inam Ullah, and Nermin M. Salem. 2022. "A Proposed Waiting Time Algorithm for a Prediction and Prevention System of Traffic Accidents Using Smart Sensors" Electronics 11, no. 11: 1765. https://doi.org/10.3390/electronics11111765
APA StyleCho, S., Shrestha, B., Salah, B., Ullah, I., & Salem, N. M. (2022). A Proposed Waiting Time Algorithm for a Prediction and Prevention System of Traffic Accidents Using Smart Sensors. Electronics, 11(11), 1765. https://doi.org/10.3390/electronics11111765