1. Introduction
The PLLs have been widely utilized in high-speed data transmission systems such as SerDes, wireless transceivers and disk read/write channels, where short-phase locking time and low-phase noise are required.
For conventional PLLs, the division ratio of feedback divider (FD) affects the bandwidth and the damping factor (
), which, for some of the settings, may lead to poor jitter performance or even unstable states. A typical PLL tends to lock on the target state at a roughly constant speed due to the fixed bandwidth. The self-biased PLLs, which find the optimal operating bias level and charge pump (CP) current in an adaptive fashion [
1,
2], feature high stability, low jitter, and large operation range, and have been widely used [
3,
4,
5,
6]. Further, the self-biased PLLs are in no need of resistors and are independent of operating process, voltage, temperature (PVT) and frequency.
In order to realize the fast-settling process of the PLLs, two CP currents of different magnitudes were adopted [
6,
7], where the larger CP current was utilized under the acquisition process, and the smaller one was utilized in steady state. Therefore, a shorter pull-in time can be achieved due to the wider bandwidth in the capture process. However, the CP currents were fixed, leaving the pull-in performance to fluctuate over a wide range of division ratios.
To address such an issue, the concept of adaptive charge pump current was put forward to allow the bandwidth being adjusted adaptively [
8,
9]. In [
8], the charge/discharge current of the CP varies appropriately over the CP output voltage range, which can effectively speed up the capture process by 72% in comparison. However, such a technique cannot be applied to a self-biased architecture where the CP current is adaptive. The adaptive current of the CP in [
9] is determined by the output result from the phase frequency detector (PFD), which can shorten the lock-in time from 8 us to 2 us. Unfortunately, the resistors used in such a design would otherwise make the self-biased PLL’s performance deteriorate with the process and temperature variations.
There are some other effective fast-locking architectures, as proposed in [
10,
11,
12,
13,
14]. The sub-sampling PLL [
10] is a dual-loop architecture with an FLL, which speeds up the locking time and saves half of the power budget during the frequency acquisition. This fast-locking technology is more efficient with those PLLs of employing the push–pull sub-sampling phase detector (SS-PD) or the bang-bang phase detector but not PFD, so it will offer limited benefits on the fast-locking performance of the self-biased PLLs. The proposed PLL in [
11] utilizes an aperture phase detection (APD) mechanism and a dead zone creator to save the power consumption in locked state and reduce the locking time by 32%, where the acceleration is relatively weak. Some other phase error compensation and bandwidth control techniques proposed in [
12,
13,
14] help to significantly reduce the locking time, but their relative circuits will greatly increase the logic complexation and area.
As just mentioned, it is a great challenge to optimize the self-biased PLL design for a shorter locking time and overhead area. In this paper, an adaptive fast-locking self-biased PLL with a start-up circuit and an auxiliary adaptive fast-locking current circuit (AFLCC) is proposed, with loop dynamics parameters that are characteristically independent of the operating frequency and the division ratio. A scaling factor is also introduced to facilitate circuit design optimization. As a result, the AFLCC speeds up the loop equilibrium acquisition process with minimum area overhead and power consumption, meanwhile avoiding any adverse impact on the steady-state loop dynamics and the jitter performance.
2. Self-Biased PLL Fundamentals
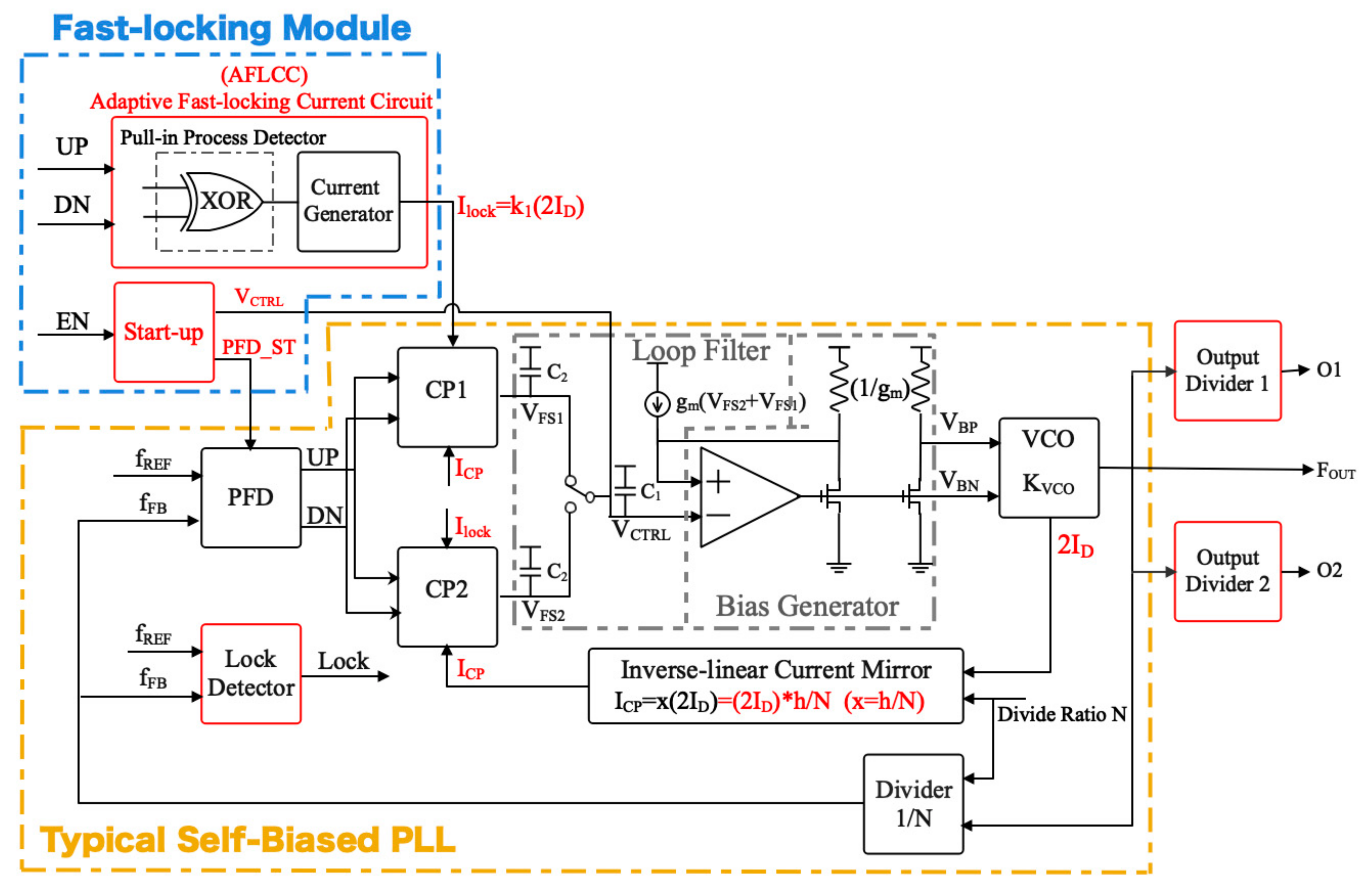
The conventional PLL mainly consists of a phase-frequency detector (PFD), a charge-pump (CP), a loop filter (LF), a voltage-controlled oscillator (VCO), and a feedback divider (FD) (see
Figure 1). The key dynamics parameters of the conventional second-order PLL are defined as
where
and
are the LF resistor and capacitor, respectively,
is the CP current,
is the VCO gain,
is the FD ratio,
is the bandwidth, and
is the damping factor.
For typical PLLs, the parameters , , , , and are usually fixed, leading to fixed and . Moreover, represents the response rate of the system. Consequently, the typical PLLs cannot always obtain an optimally fast acquisition under all the operating conditions.
The yellow box in
Figure 1 shows the diagram of the basic self-biased PLLs, which mitigates the drawbacks (fixed
and
) of the typical PLLs [
1].
is set to some multiplied
of the VCO buffer tail current
, and the resistor in LF is realized by a
resistance, which is proportional to the output period, such that constant
and
can be attained and simply given by Equations (2) and (3):
where
y is the ratio of the
resistance to the symmetric loads used in the VCO buffer stages,
represents the equivalent capacitance of the VCO, and
is the operating frequency of the VCO.
In [
2], an inverse-linear current mirror circuit is adopted to make x equal to
, and a sampled filter circuit is used to make y equal to
for the feedforward network, where
and
is the output charge and input charge of the feedforward network respectively. As a result,
and
are updated and given by
Therefore, the self-biased PLLs have constant loop dynamic parameters, and , which are independent of N, operating frequency, and PVT.
3. Proposed Adaptive Fast-Locking Architecture for the Self-Biased PLL
Self-biased PLLs show good performance in stability, process independence, jitter, and wide frequency range [
1,
2]. However, the inverse-linear current mirror circuits possess the property where the larger
is, the smaller
is. In other words, if
is extremely large, the pull-in process would be extremely slow due to the extremely narrow bandwidth. Therefore, the lock-in time can vary with different operating configurations.
Figure 1 suggests a solution to circumvent this problem. A fast-locking module based on the current injection and adaptive bandwidth technology is adopted. When the loop is in the pull-in process,
will be increased adaptively in a way to widen the bandwidth, and when in the locked state,
is kept at an optimized value to acquire low jitter and high stability. Further, the lock detector and output dividers are included to work in conjunction with other modules in AFL-SPLL. The output dividers 1 and 2 perform a division of 1–30, with both O1 and O2 operating over a frequency range from 333.3 MHz to 3 GHz. This way, the output has a wide frequency range, yielding more choices for the system speed grade.
The start-up circuit serves the purpose of discharging and presetting the voltage to a proper level quickly, which facilitates activating VCO to oscillate reliably. Specifically, the complete loop will not finish the set-up phase until the start-up circuit generates a flag signal indicating that the VCO is now being steadily oscillated.
The AFLCC will pump an extra adaptive current
into CP, which widens the bandwidth and accelerates the pull-in process. Like the
,
is also adaptable and given by
To allow some flexibility in circuit design optimization, the parameter x is scaled to (
) instead of (
). Assuming the original dynamics in the steady-state to be
and
, both parameters in the capture process should be updated such that
Both parameters are multiplied by . Thus, compared with the original self-biased architecture for a certain operating frequency, was in effect enlarged by , furthering to speed up the acquisition. The AFLCC is only activated in the pull-in process but should be shut in the locked state.
In other words, the proposed fast-locking module has no implication whatsoever on the locked state behavior of the PLLs.
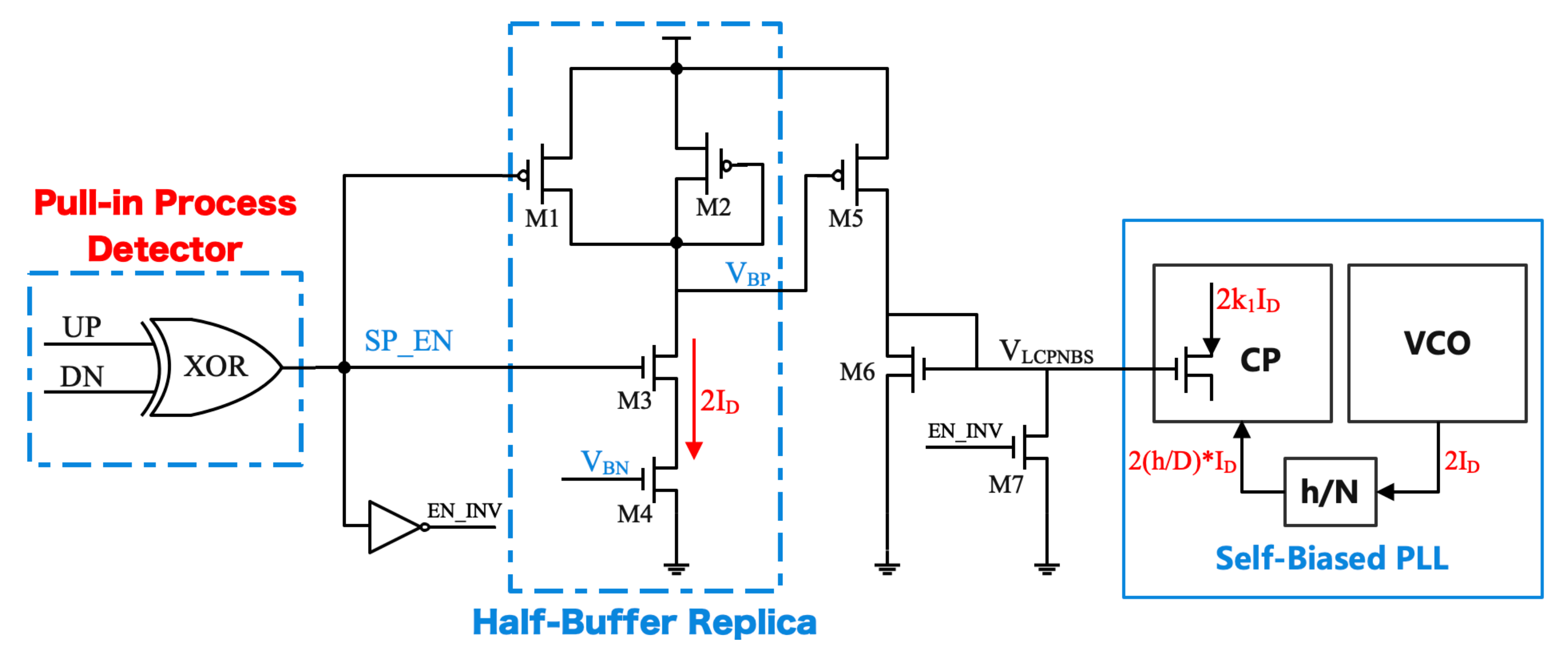
3.1. Adaptive Fast-Locking Current Circuit (AFLCC)
The proposed AFLCC, shown in
Figure 2, adopts the current mirror structure. The transistors M1–M4 form a replica of the bias generator circuit to keep
following
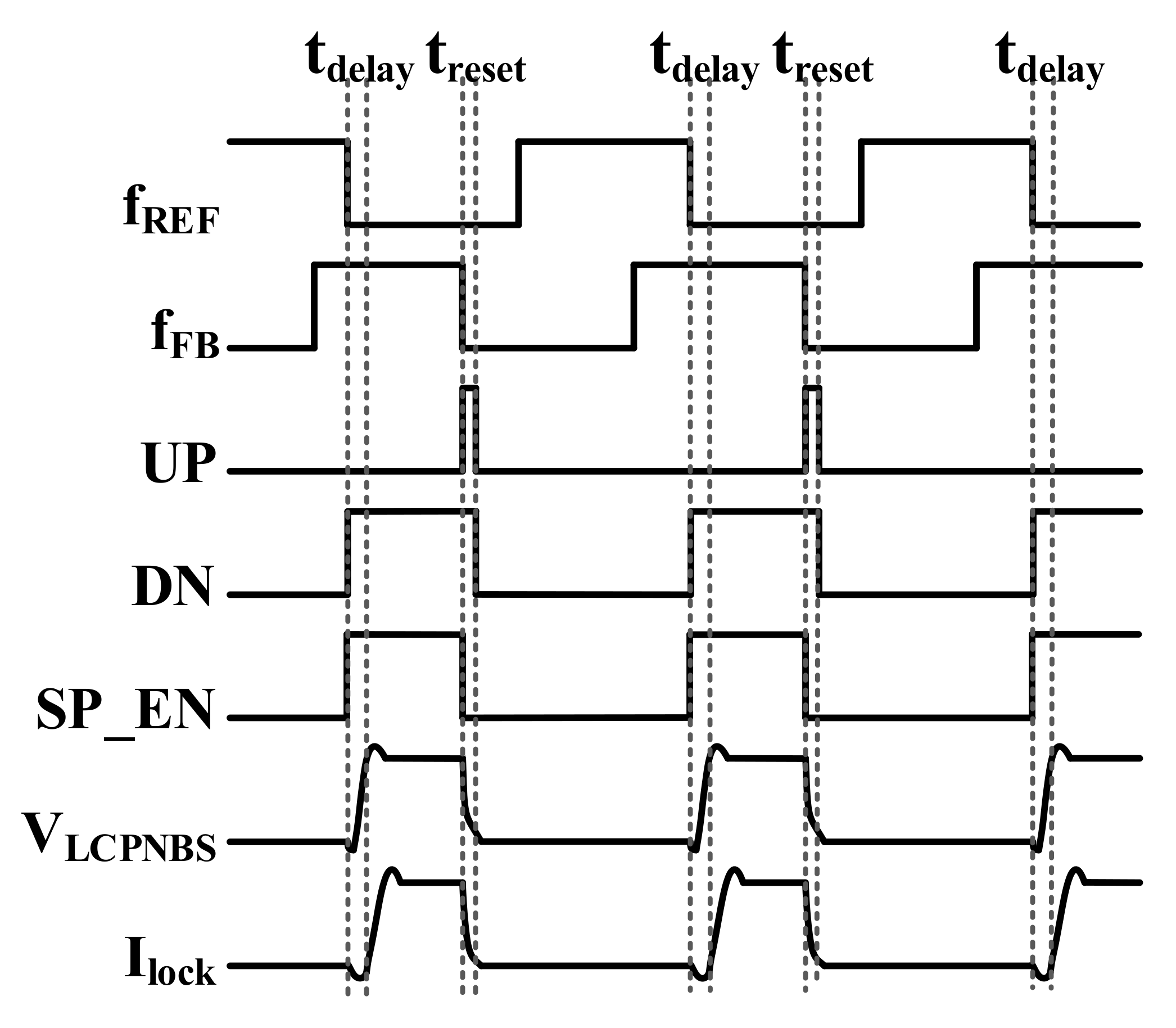
precisely. The operating principle is shown in
Figure 3. The XOR gate can detect the state of the loop through the outputs of the phase-frequency detector (PFD). When the PLL is in the capture process, the XOR generates a pulse (SP_EN) and produces a locking current. When in the locked state, M3 and M7 can cut off the locking current.
Obviously, the switch transistors are not ideal and induce a small delay
at the output
. Intuitively, every time the AFLCC is turned on, it will take some time to pull the voltage
from 0 to a correct value. So, no current will be generated until
rises above the transistor threshold voltage, as shown in
Figure 3.
Actually, this intrinsic small delay is desired. The PFD always outputs a pulse even in the locked state. Therefore, if the transistors ideally induce no delay, AFLCC would always tend to generate an output current, large or small, so that the multiplied dynamics parameters may cause the stability problem.
The AFLCC can be disabled earlier before the real lock-in starts due to the intrinsic delay of switches. If the phase error becomes smaller than a certain value or minimum pulse width [
14], the AFLCC will not be activated at all. This working principle will benefit the pull-in process, particularly for the operating conditions of high reference frequency or of the loop getting close to the locked state.
Under the high reference frequency condition, is small so that holds a large value by (7). Therefore, the bandwidth will be wide enough, and the loop could exhibit fast pull-in performance with no need of extra current injection. Additionally, the phase error in terms of time is always small due to the small reference period, in which case the intrinsic delay induced by the switches makes AFLCC cease having any influence on the loop. This way, no degradation of the original good lock-in performance will ever happen.
When the loop comes close to the locked state, the phase error also decreases. If an extra large is added to at the time, the loop would be likely to repeatedly ripple around the steady point. This is because the extra may make the frequency step exceed the lock-in range , taking the PLL out of the lockable region. The is equivalent to the maximum frequency error for which acquisition is almost instantaneous. Therefore, the delay is helpful in damping the margin ripple in the pull-in process.
In other words, the AFLCC can widen the bandwidth adaptively following the operating frequency and , giving rise to a much shorter lock-in time of the system, especially for larger .
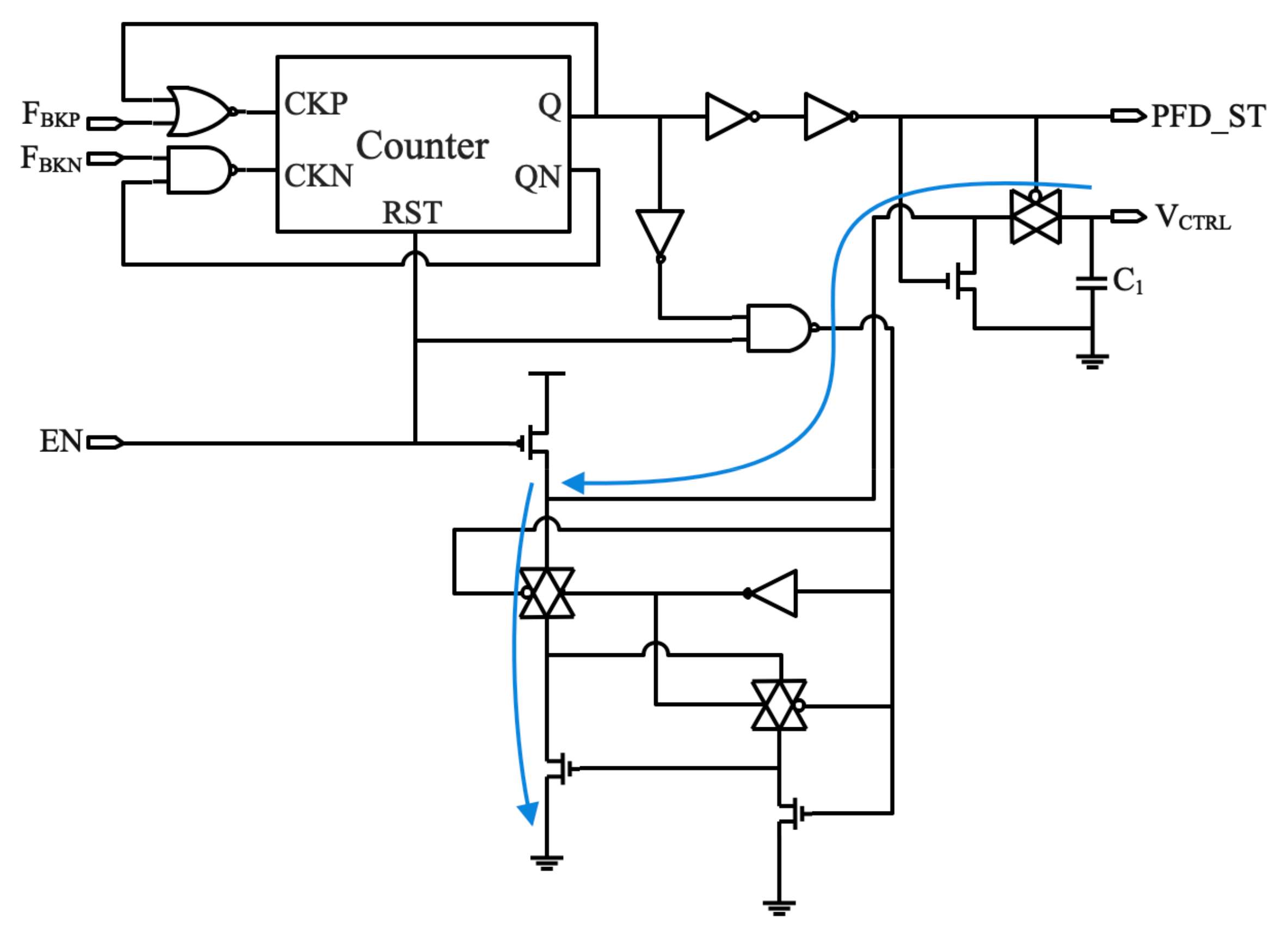
3.2. The Start-Up Circuit
The start-up circuit, shown in
Figure 4, consists of logic gates and a counter, which can start the VCO steadily and guarantee the initial frequency error is well within the pull-in range
, in a way to enhance the robustness of the system.
The counter decides whether the VCO has reached a normal oscillation, and when satisfied, asserts the flag signal PFD_ST. The period of the counter can be set appropriately—typically, 64 cycles in this design.
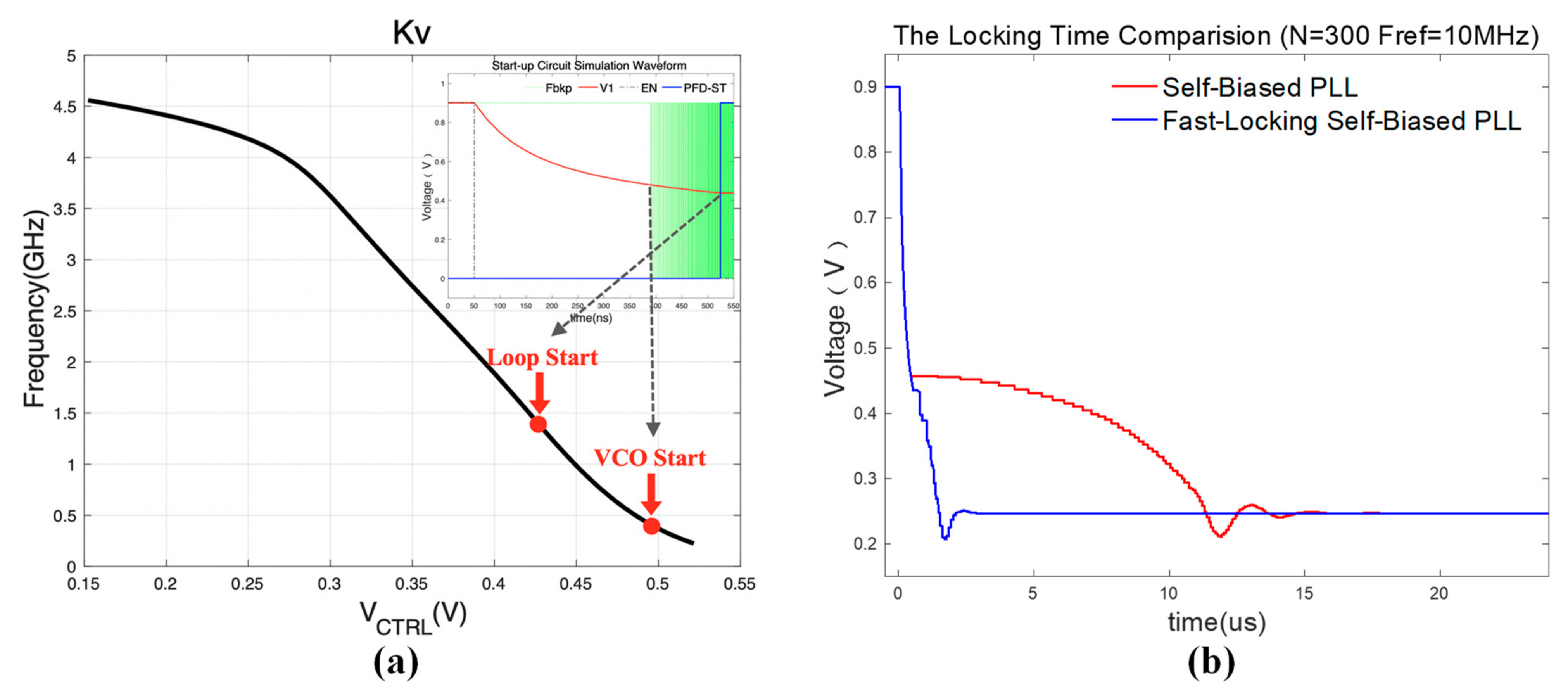
The working principle and simulation waveform are shown in
Figure 5a. The start-up circuit initially sets
to the supply voltage, and the enable signal EN is set low. If
is asserted to a high level,
begins to discharge, and
drops slowly. The path of discharge current is marked with the blue arrow in
Figure 4. When
falls to a proper value, the VCO starts oscillating, and the counter will be activated. Until the VCO oscillates continuously over 64 periods, PFD_ST will be pulled to the high level. At this point, while the start-up circuit is disabled, the complete loop is set up, and the PLL comes into the pull-in process.
The different counter value (
) can incur different lock-in times. As VCO tends to start oscillating at a fixed voltage, it should be appropriate to set up the whole loop at a lower voltage of
, where the operating point is situated in the linear region of the
curve and the loop bandwidth is larger. Thus, the pull-in process can effectively be accelerated.
Figure 5 shows the simulation waveform where
is set to 300 MHz and
is set to 10 equally, and
is set to 64 and 16, respectively. The result indicates that the former corresponds to a faster pull-in performance.
Notably, although speeding up the discharge on the capacitor , or prolonging the discharge time, can accelerate the capture process, it is important to avoid from dropping too rapidly and hence going out of the tuning range during the counting process. Preferably, the optimal point to set up the whole loop would be at the center frequency of the VCO.
Assuming the VCO starts at the moment
when
,
, and the expected time to set up the loop is the middle point within the VCO tuning range where
,
, and
. Additionally, assuming the discharge process of
is approximately linear from
to
, and the equivalent frequency is (
, we can formulate Equations (10) and (11) and calculate the optimal
by Equation (12).
5. Conclusions
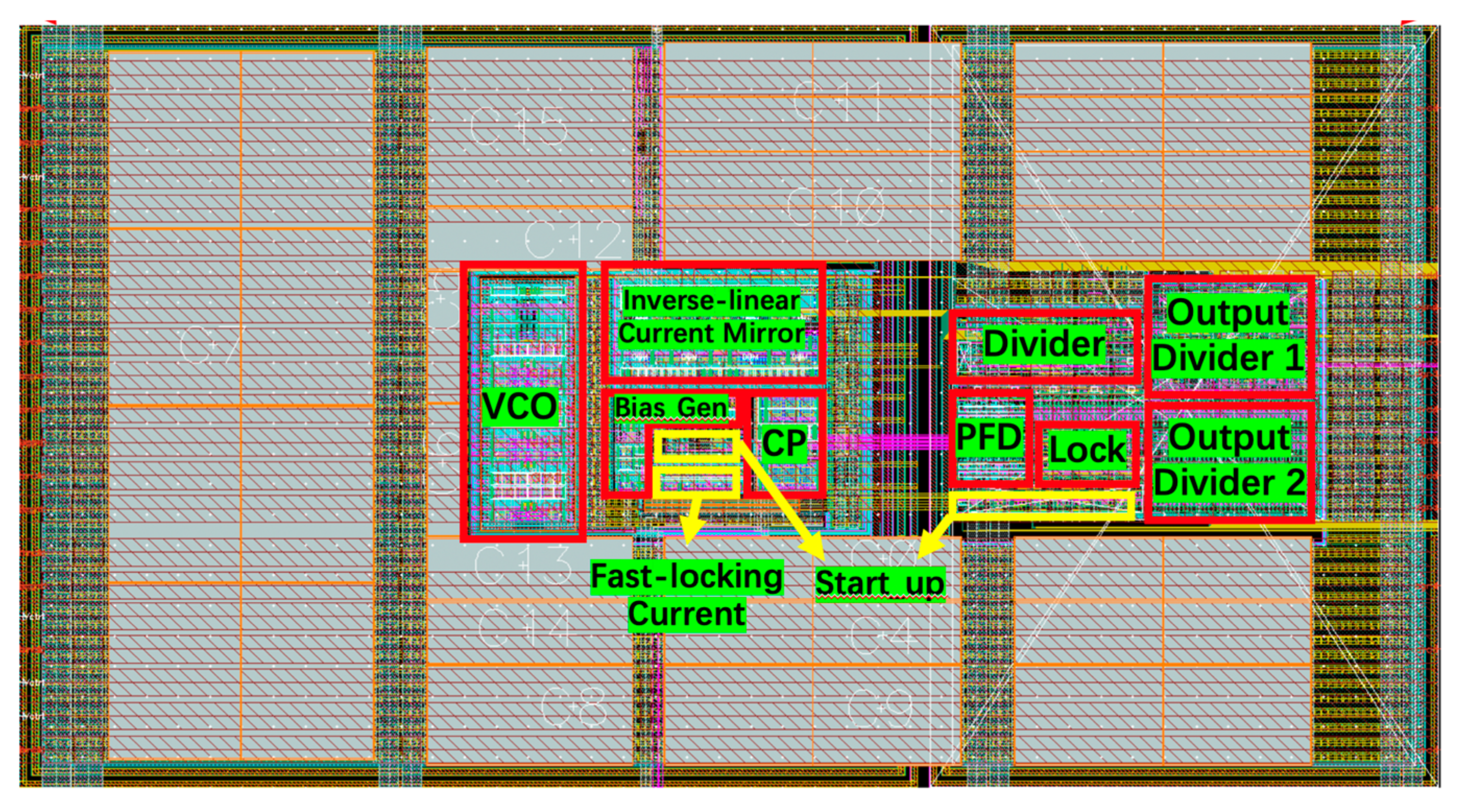
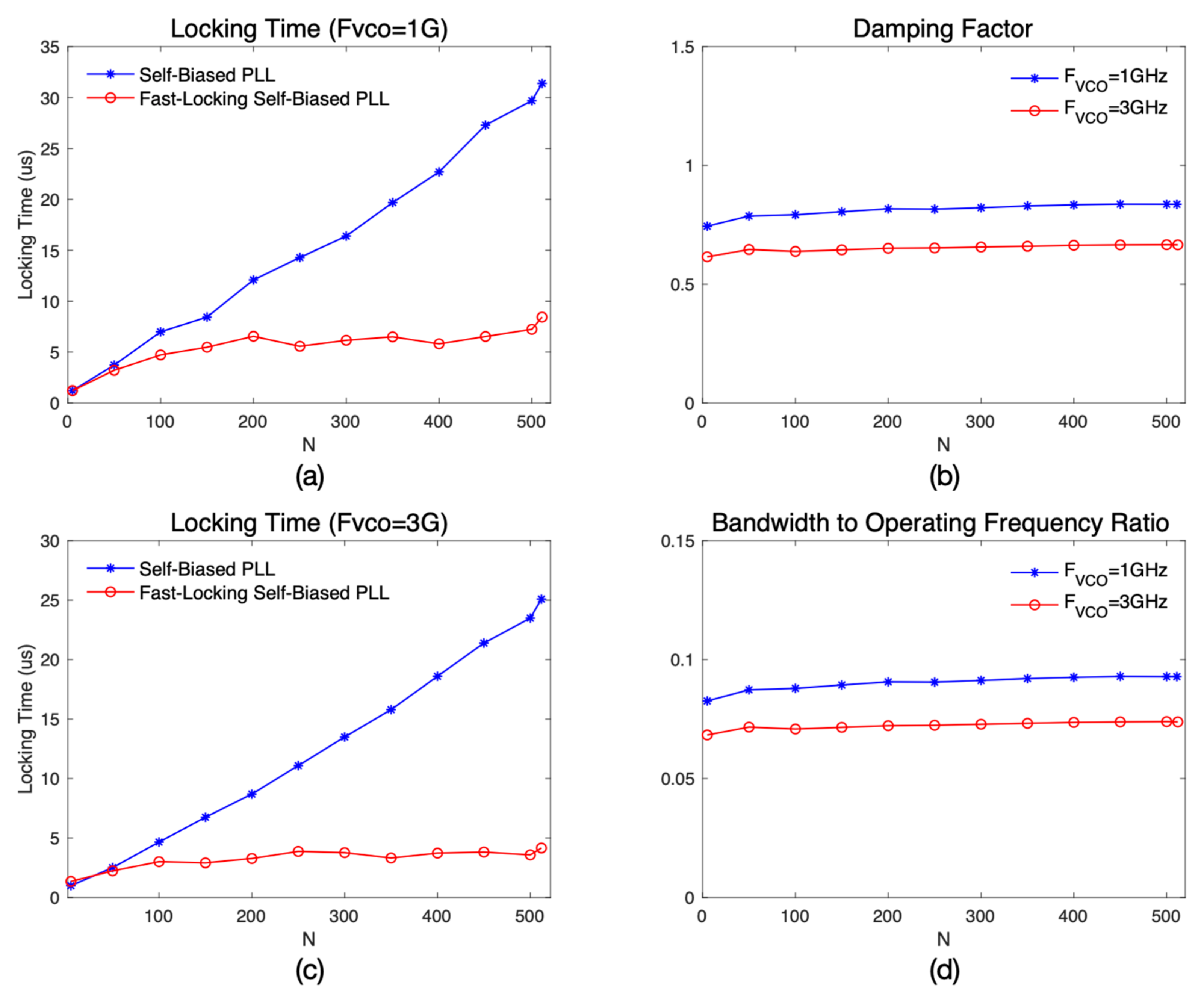
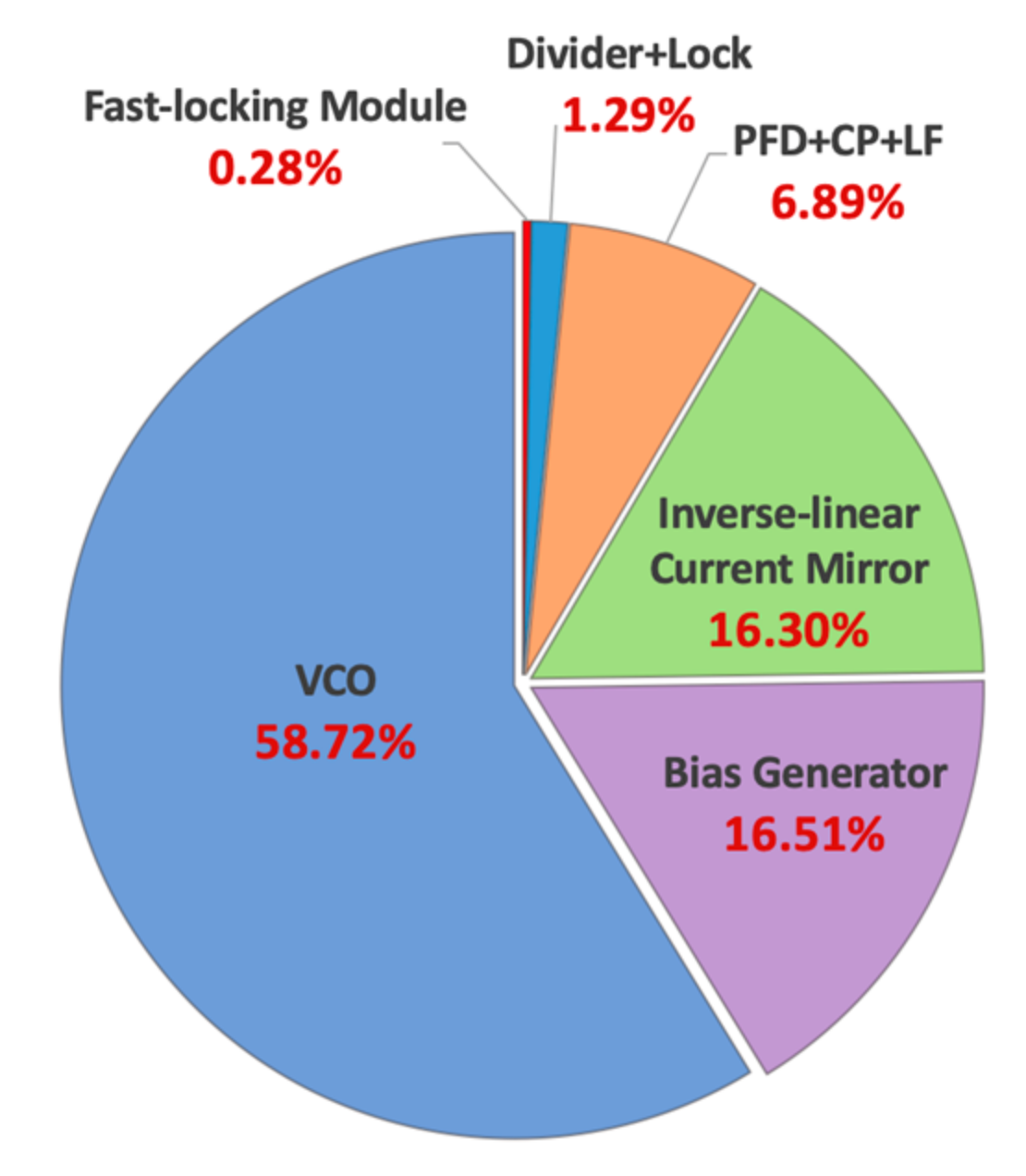
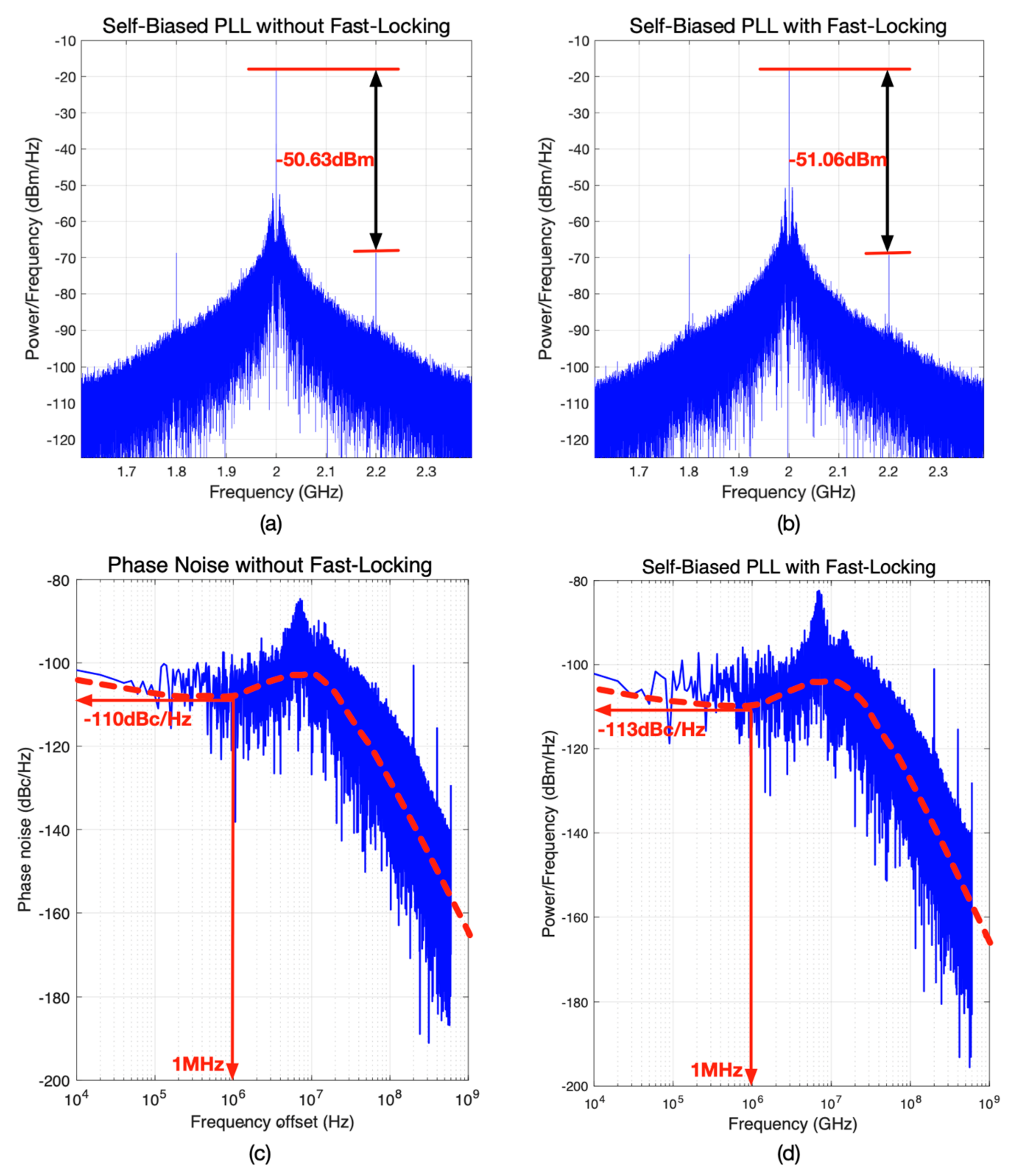
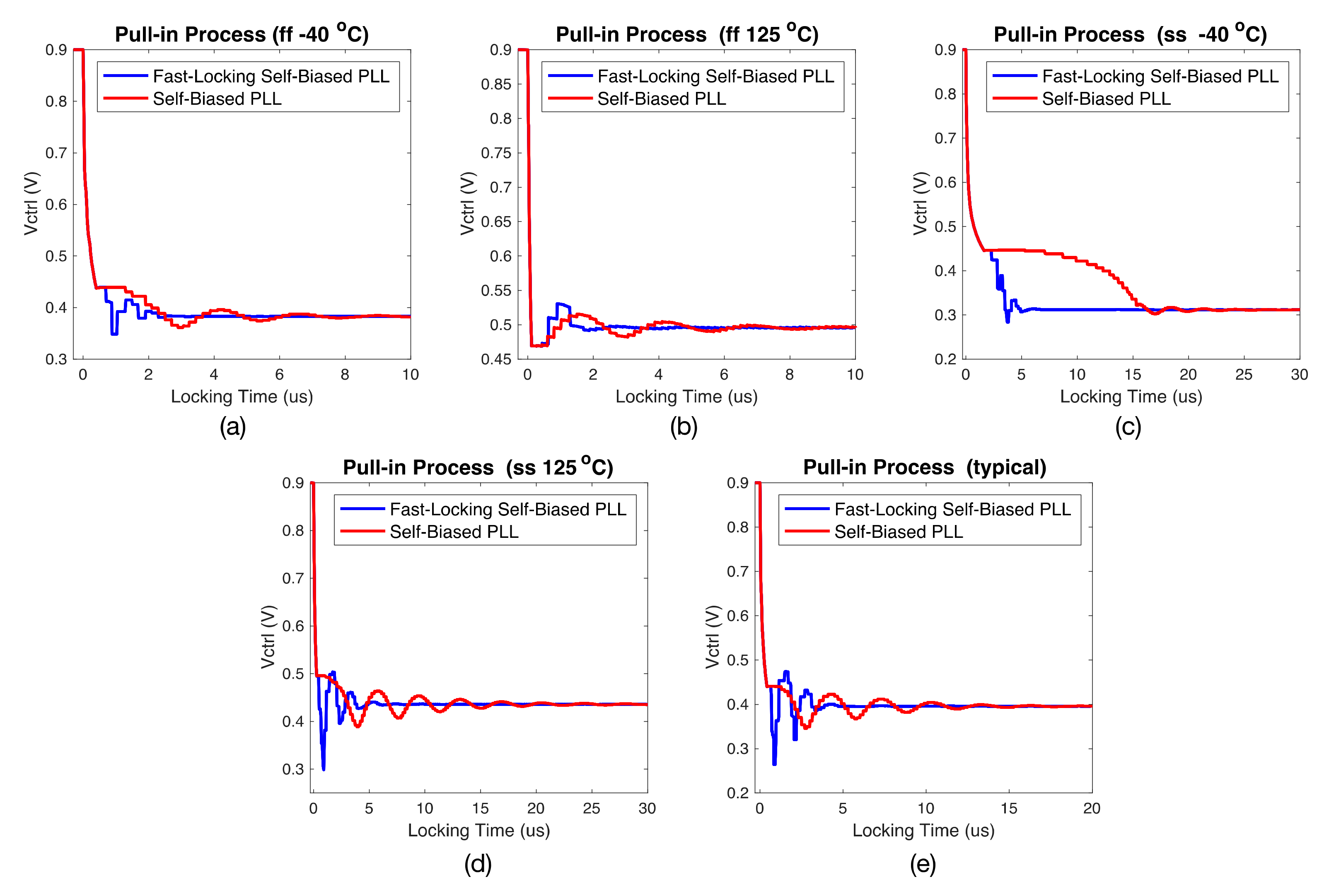
A fast-locking system for the self-biased PLLs, consisting of a start-up circuit and an AFLCC, is designed and layout is implemented in 28 nm COMS technology with 0.9 V supply, having a tuning range from 1 GHz to 3 GHz and working at a division ratio anywhere between 5 to 512. The core area of the fast-locking PLL is just 0.0281 mm2 with only 0.93% of the area occupied by the fast-locking module. The lock-in time is shortened by about 84.7% for large division ratios without sacrificing jitter performance. In addition, a proportional factor h and the optimal counter value of the start-up circuit are introduced to provide extra flexibility in optimizing the PLL design to some required specifications. As demonstrated in the post-layout simulation results, the proposed fast-locking PLL has achieved faster lock-in times on the various loop dynamics conditions, while the loop stability is well-maintained.
It is noted that the capture duration of a typical self-biased PLL is largely affected by the PVT conditions. The proposed AFL-SPLL alleviates this dependency to a certain extent but cannot completely eliminate such an impact of the PVT variations on its locking time. This circuit design issue requires further investigation.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}