1. Introduction
Over the past few years, radar has been widely applied in civil and military due to its all-day and all-weather target detection capability. However, the gradual development of stealth technology makes the signal-to-noise ratio (SNR) of radar echoes extremely low, posing a significant challenge to the traditional radar detection technology [
1,
2,
3,
4,
5]. It is known that integrating the energy of multiple echoes can effectively improve the ability of weak target detection without changing the radar hardware. Especially for long-time coherent integration, it can almost achieve linear integration gain with the number of pulses via compensating for the phase difference between different echoes [
6,
7,
8,
9,
10].
Unfortunately, the emergence of highly maneuvering targets causes the envelope and phase of the echoes signal to migrate over a long integration time, resulting in range migration (RM) and Doppler frequency migration (DFM). These detrimental effects seriously deteriorate the detection performance and invalidate conventional integration methods. Hence, it is necessary to compensate the RM and DFM to concentrate the signal energy and improve the gain.
According to the different ways of compensation, the existing methods can be roughly divided into envelope-phase independent compensation methods and envelope-phase joint compensation methods, as shown in
Table 1.
The independent compensation methods adopt cascade processing, which regards the envelope term and phase term as independent parts, compensating the RM and DFM generated by them. Specifically, RM generated by the envelope term includes: (1) the first-order term, namely linear RM (LRM); (2) the second-order term, namely quadratic RM (QRM), also known as range curvature; (3) the higher-order term. Keystone transform (KT) [
11,
12], axis rotation (AR) [
13], and scaled inverse Fourier transform (SCIFT) [
14] are proposed to solve LRM, in which KT eliminates the coupling between fast time and slow time via variable scale transformation, and it can realize correction without a priori information. Adjacent cross-correlation function (ACCF) [
15], second-order KT (SKT) [
16,
17], and other algorithms are utilized to deal with QRM. On the other hand, the phase term migration includes the first-order term, i.e., Doppler frequency shift (DFS), and the second-order term, i.e., DFM. For DFS, the moving target detection algorithm (MTD) [
18] based on fast Fourier transform (FFT) is simple and effective in engineering. While for DFM, the performance of FFT, which can only handle fixed frequency signals, becomes worse. Thus, a series of time-frequency analysis tools that can conduct time-varying frequency signals are widely used, e.g., Wigner Ville distribution (WVD) [
19], fractional Fourier transform (FRFT) [
20], and LV distribution (LVD) [
21]. LVD is a novel method proposed in recent years, and it can gather the energy-dispersed linear frequency-modulated (LFM) signal into an impulse in the centroid frequency and chirp rate (CFCR) domain without any searching process. The above envelope and phase compensation methods are organically cascaded to form complete envelope-phase independent compensation methods, i.e., ARMTD [
22] and KTFFT [
23] for uniform moving targets; and ACCFLVD [
24], KTLVD [
25], and SKTRFT [
26] for uniformly accelerated targets. In the case of signal envelope and phase decoupling, these methods can exploit their characteristics to select the corresponding transformation and fast algorithm for compensation flexibly. Therefore, the amount of calculation is usually small, and the real-time performance is strong. However, when dealing with targets with complex motion states, these methods adopt approximation to simplify the motion model and make the correction algorithms realize smoothly. Moreover, the approximation will inevitably cause errors and reduce the coherent integration gain.
The joint compensation methods wield parallel processing, which realizes the joint compensation of the signal envelope and phase term via searching the unknown motion parameters of the target. Radon Fourier transform (RFT) [
27,
28,
29] is one of the classic algorithms, attracting extensive attention since it was proposed. It realizes the accumulation of uniform velocity targets through the two-dimensional joint search of distance and velocity. On this basis, generalized RFT (GRFT) [
30] is used to complete the coherent accumulation of complex moving targets. In addition, [
31] combines RFT and fractional Fourier transform (FRFT) to propose RFRFT, and [
32] combines RFT and Lv’s distribution (LVD) to propose RLVD. The advantages of these methods are accurate compensation and high coherent accumulation gain. Ideally, when the search parameter value exactly matches the real parameter value of the target, the RM and DFM can be fully compensated, and the best coherent integration gain can be obtained. However, implementing these methods is not straightforward because the scope and interval of parameter search are challenging to determine without prior knowledge. If we pursue high gain, the search range needs to be expended, and the search interval needs to be refined, increasing search volume. For maneuvering targets with acceleration, the amount of computation increases geometrically due to the further improvement of the search dimension, which seriously affects the real-time performance of these methods.
The above analysis shows that the existing two kinds of algorithms have the problems of unsatisfactory integration gain and poor real-time performance, which are challenging to meet the increasing detection needs of high maneuvering weak targets on the whole. Therefore, this paper proposes a method based on RFT, SKT, and LVD, i.e., SKTLVD, to solve the problem of high-speed maneuvering target coherent integration and detection. In this method, RFT is firstly employed to search the target velocity and jointly eliminate the LRM in envelop and DFS in the phase; then, SKT is performed to compensate QRM in the envelope independently. Finally, LVD is utilized to correct the DFM in the phase and realize the coherent integration. It can be seen that SKTLVD jointly compensates the first-order term migration in the envelope and phase via a one-dimensional search and independently compensates the second-order term migration in the envelope and phase via SKT and LVD. Thus, it combines the advantages of independent and joint compensation methods, reconciling the coherent integration gain with real-time requirements.
The rest of this paper is organized as follows: In
Section 2, the signal model is presented.
Section 3 analyzes the traditional methods and explains the problems. In
Section 4, the coherent integration method based on SKTLVD is proposed, and the main procedure and computational complexity analysis of the proposed algorithm are also drawn. In
Section 5, the numerical experiments are carried out to verify the effectiveness of SKTLVD. Finally, conclusions and future works are given in
Section 6.
2. Signal Model
Suppose that the radar transmits an LFM signal, which can be written as:
where
is the rectangular window function.
represents fast time, and
denotes the pulse duration.
denotes slow time, in which PRT is the pulse repetition time, and
M is the integration pulse number.
K denotes the frequency modulated rate, and
is the carrier frequency. Therefore, the
pulse-echo signal scattered from the target received by the radar after down-conversion can be stated as:
where
denotes the target reflectivity, and
denotes the speed of light.
is the instantaneous slant range between the radar and target. Neglecting the high-order motion components, the
of the maneuvering target with a constant acceleration satisfies
where
,
, and
denote the initial slant range, the radial velocity, and the radial acceleration between the radar and the target, respectively. Use match filter
, and according to the stationary phase principle, the signal after pulse compression in
domain can be expressed as:
where
is the signal amplitude after pulse compression, and
B is the signal bandwidth, then using inverse FFT (IFFT) to transform the signal to
domain:
where
is signal amplitude after IFFT,
is signal wavelength, and
is the sinc function. From the
, it can be found that:
The peak position of the signal envelope , which moves with the slow time. Moreover, when the migration exceeds one range resolution unit, the RM is generated. The first-order term, i.e., leads to LRM and the second-order term, i.e., leads to QRM.
The signal phase term is an LFM signal with respect to the , its centroid frequency is , and chirp rate is . As we know, the frequency of the LFM signal changes with time, and when the variation exceeds one frequency resolution unit, the DFM is generated.
Consequently, the LRM, QRM in the signal envelop, and DFM in the signal phase must be eliminated to improve the gain of coherent integration.
4. Coherent Integration Based on SKTLVD
4.1. The Principle of the Proposed Method
Aiming at the deficiencies of existing algorithms, a novel long-time coherent integration method for maneuvering targets is proposed. Its principle and main steps are as follows:
Step 1. Perform pulse compression on the received signal and apply FFT along the dimension.
We can obtain the signal in the range frequency-slow time domain, as shown in Equation (6). There are LRM, QRM and DFM in the envelope and phase of the signal at present, which need to be eliminated.
Step 2. Linear range walk correction via RFT.
In order to tackle LRM, the first-order coupling between and in Equation (5) must be eliminated. KT can effectively realize blind correction, but it will bring more trouble to QRM correction, as shown in Equation (7). It is difficult for KT-based methods to compensate LRM and QRM simultaneously. Therefore, the proposed method first borrows the idea of RFT and directly searches the target velocity to jointly compensate for first-order migration in the envelope and phase, which can avoid the Doppler ambiguity of the KT-based method at the same time. In addition, the search for the slant range will be completed later.
Then, we determine the searching scope of target velocity
based on related prior information, and the search interval is set to
, where
T denotes the total coherent integration time. Thus, the velocity search value can be expressed as:
where
denotes the number of searches. Furthermore, the compensation function
is constructed accordingly and multiplied by Equation (5) to obtain:
When , the LRM in the envelope and DFS in the phase are completely compensated, and the highest coherent integration gain is obtained. Hence, is determined via maximizing the final coherent integration result.
Step 3. Range curvature correction using SKT.
For the convenience of analysis, suppose that
; then, Equation (12) can be written as:
Now, there is no first-order coupling term interference. Then, SKT is directly adopted to eliminate QRM, and the scaling expression of the SKT is defined as:
Substituting (14) into (13) yields:
It can be seen that all coupling in the signal envelope has been eliminated after SKT. Hence, LRM and QRM are completely compensated. Applying IFFT on Equation (15) with respect to
, we can obtain:
where
is the signal amplitude. We can observe that the target energy has been concentrated in the same range cell. To further improve the coherent integration gain, it is necessary to continue the slant range search in RFT. With the given search interval
and search scope
, the extracted signal
can be expressed as:
Step 4. Doppler walk correction employing LVD.
The signal after range search can be written as:
We can see that becomes a chirp signal in the slow time dimension, where the centroid frequency is 0, and the chirp rate is . Thus, the LVD is conducted to compensate DFM, and the specific procedures are as follows:
Calculate the parametric symmetric instantaneous autocorrelation function
of Equation (18):
where
b denotes a constant time-delay related to a scaling operator, and
τ denotes lag variable.
Use variable substitution
to remove the coupling between
and
in the exponential phase term:
Perform two-dimension (2D) FT on Equation (20) with respect to
and
, the LVD is obtained:
where
is the transformed amplitude after LVD. So far, all three migrations, i.e., LRM, QRM, and DFM, have been eliminated, and the spreading energy has been concentrated in the same cell. Hence, the target’s energy coherently integrates as a peak in the CFCR domain, and the peak value is located in
, which is consistent with the actual value of target motion parameters.
Step 5. Estimate unknown motion parameters include
via maximizing the
, as shown in Equation (22):
When the searching range, velocity, and acceleration, respectively, match the actual value of the target, the LVD output can reach its maximum value.
Step 6. Carry out the constant false alarm ratio (CFAR) detector and take the maximum with the adaptive threshold to confirm a target:
where
is the detection threshold given by the false alarm probability; if the maximum is smaller than the threshold, the moving target detection is announced. Otherwise, there will be no target.
In conclusion, the flow of the proposed SKTLVD can be summarized as follows:
In
Figure 1, the green steps correspond to using RFT to compensate LRM, the red steps represent adopting SKT to eliminate QRM, and the yellow steps mean applying LVD to remove DFM.
4.2. Computational Complexity Analysis
In this part, the computational computation of the proposed method SKTLVD is analyzed in terms of the number of complex multiplications and compared with KTLVD, SKTRFT, RFRFT, and RLVD methods. Assume that the number of echo pulses, searching range, searching velocity, searching acceleration, and searching Doppler ambiguity are denoted as . The number of FRFT rotation orders and LVD time lag are expressed as . The amount of computation required for the main steps of each method is described below.
SKTRFT eliminates QRM via SKT (), estimates acceleration via FRFT (), and eliminates the LRM via RFT ().
For KTLVD, its main procedures include include KT (), range search (), LVD operation (), and Doppler ambiguity search ().
The implementation of SKTLVD needs velocity search (), QRM correction via SKT (), range search (), and DFM correction via LVD ().
The main procedures of RFRFT contain 3-D search () and FRFT operation ().
RLVD consists of a 3-D search () and LVD operation ().
By overlaying the computations of each step, the computational complexity of the above methods is listed in
Table 2.
Under the assumption of
Nr = Nv = Na = Nd = Np = Nτ = M,
Figure 2 intuitively depicts the computational curves according to
Table 2.
Consequently, the computational complexity of each method is ranked from low to high as follows: SKTRFT < KTLVD ≈ SKTLVD < RFRFT ≈ RLVD. It can be seen from
Figure 2 that due to 3D search, RFRFT and RLVD consume the most considerable computation, which is not suitable for real-time processing. Compared with the above two joint compensation methods, KTLVD and SKTLVD avoid the search of acceleration and reduce the computational complexity by two orders of magnitude. Meanwhile, SKTRFT has the lowest amount of computation because it sacrifices the integration performance and adopts a more straightforward RFT operation.
5. Simulation Results and Analysis
In this section, we carry out several numerical experiments to verify the performance of the proposed method under the complex zero-mean white Gaussian noise environment, where the simulated parameters are given in
Table 3. Furthermore, other popular coherent integration methods, i.e., MTD, RFT, KTLVD, SKTRFT, RFRFT, and RLVD, are also given for comparative analysis.
5.1. Migration Correction Ability
First, the effect of migration correction includes LRM correction, QRM correction, and DFM correction, which are depicted in
Figure 3, and the noise is ignored temporarily for the convenience of observation.
Figure 3a shows the target trajectory after pulse compression, which indicates severe LRM and QRM due to the high speed and maneuverability of the target.
Figure 3b shows the result after velocity search, first-order phase compensation, and SKT, where the target energy could be seen in the same range cell after LRM and QRM correction.
Figure 3c is the frequency spectrum of
, which is a typical LFM signal. It can be seen that there is severe DFM, and the target energy is dispersed in different frequency cells. Fortunately, from
Figure 3d, we can find that a significant peak is formed in the CFCR domain after LVD operation on the
, confirming the effectiveness of DFM correction.
5.2. Coherent Integration for a Weak Target
In this subsection, the long-time coherent integration performance of the proposed method for a single weak maneuvering target is evaluated, and the SNR after pulse compression is −16 dB.
Figure 4a shows the result of MTD, in which the target is totally buried in the noise because all migrations are not handled. It is evident from
Figure 4b that the RFT cannot integrate the target energy without eliminating QRM and DFM. In addition, because the error caused by neglecting QRM sacrifices some energy, KTLVD is also invalid, which is shown in
Figure 4c. Affected by the approximation error that arose out of simplifying the first-order coupling, although SKTRFT integrates energy, it is still not enough to detect the weak maneuvering target in
Figure 4d. On the other hand,
Figure 4e presents the result of the proposed SKTLVD. We can clearly see that the target energy is focused as one prominent peak via long-time coherent integration, making the target magnify out from the noise and contributing to target detection and parameters estimation. The above simulation results indicate the integration performance of SKTLVD for a weak maneuvering target.
5.3. Coherent Integration for Multi-Targets
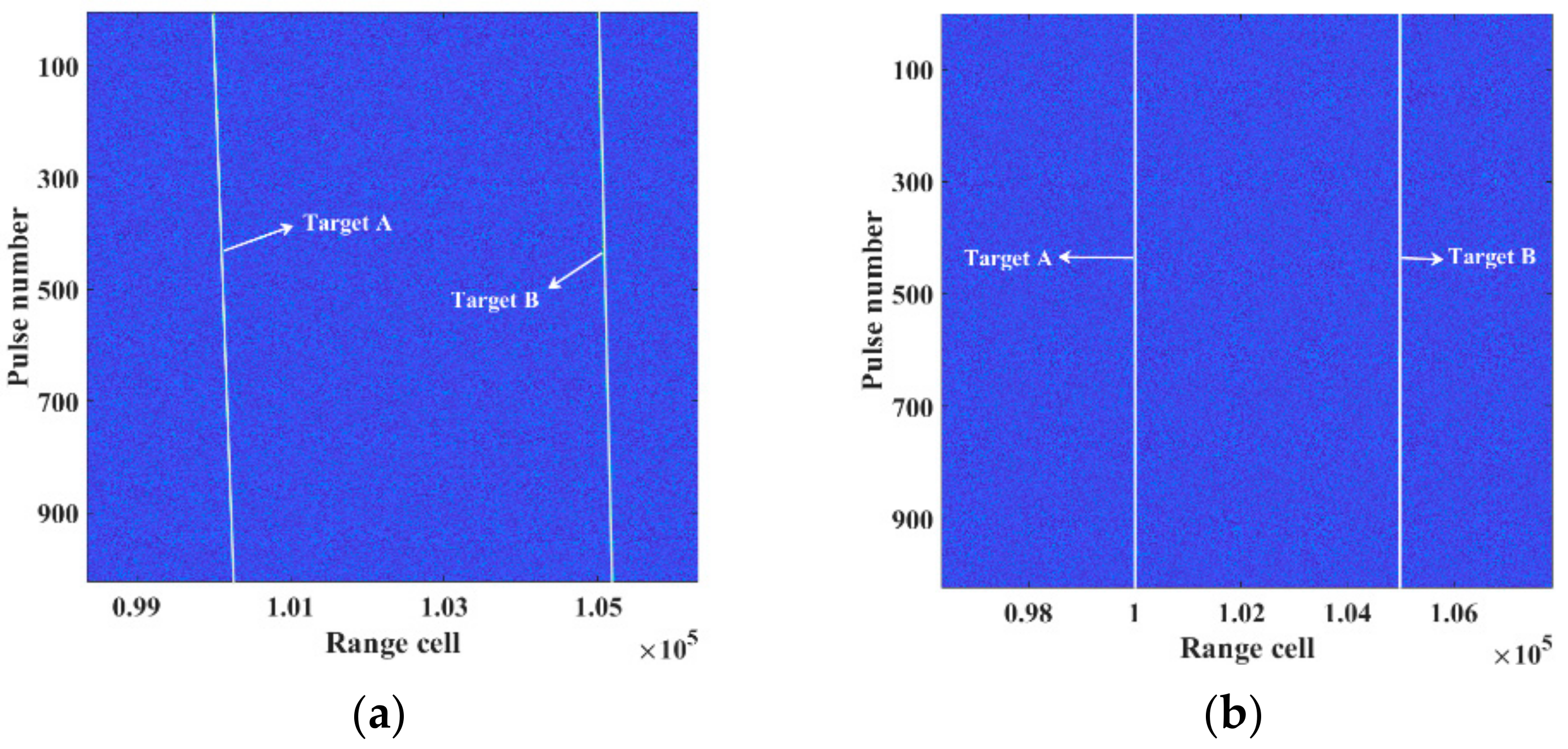
Furthermore, we analyze the coherent integration performance of the proposed method for multiple targets in
Figure 5, where the motion parameters of two maneuvering targets are listed in
Table 4.
Figure 5a shows the result after pulse compression, which indicates that serious RM occurs on the trajectories of both targets A and B. Meanwhile, we can find that the energy of targets A and B are concentrated in their initial range cell from
Figure 5b.
Figure 5c,d display the proposed method integration results of targets A and B. The initially dispersed target energy has integrated into two significant peaks, which demonstrates the ability of SKTLVD for multi-target integration.
5.4. Target Detection Performance
The detection performances of the proposed method, MTD, RFT, RFRFT, RLVD, KTLVD, and SKTLVD are investigated via Monte Carlo trials. SNRs after pulse compression vary from −25 to 10 dB with the step of 1 dB, and for each SNR value, 500 independent simulations are performed. In addition, the constant false alarm probability is set as
.
Figure 6 shows the detection probability curves of different methods versus SNR.
It is apparent that the MTD has the poorest detection probability without any compensation, while RFT is only slightly better than MTD due to ignoring the QRM and DFM caused by acceleration. It is noteworthy that the proposed method SKTLVD outperforms the RFRFT thanks to the higher gain of LVD operation. Moreover, since there is no approximation error in the motion model, the detection performance of the proposed method is superior to KTLVD and SKTRFT. Specifically, when SNR = −15 dB, the detection probabilities of SKTRFT, KTLVD, and SKTLVD are 0%, 17%, and 96%, respectively, which proves that the proposed method has more vital detection ability. Furthermore, RLVD has the optimal detection capability, but the computational complexity is enormous, limiting its practical application. Compared with the RLVD, the proposed method has close detection capability and much lower computational complexity.
5.5. Real Data Processing
The real measured radar data are used to further illustrate the practicability of the proposed method. The data were collected by VHF-band radar, which has remarkable detection performance for stealth targets, where the system parameters of the radar are given in
Table 5.
The real data processing results are illustrated in
Figure 7.
Figure 7a shows the result of MTD, in which the target energy is dispersed over multiple range and velocity cells, which creates difficulties for target detection. Furthermore,
Figure 7b gives the result after velocity search and compensation. Since the LRM has been eliminated, the RM is alleviated, and the integration performance improves. However, the energy is not fully concentrated because QRM and DFM have not been corrected. Moreover,
Figure 7c shows the result after SKT and LVD; it can be seen that the target energy is well-focused in the same centroid frequency-chirp rate cell, which significantly benefits target detection. The centroid frequency is transformed into the corresponding target velocity for visual display, and the chirp rate is transformed into the corresponding target acceleration. Finally,
Figure 7d shows the coherent integration results in the velocity-acceleration domain. We can see a significant peak formed via coherent integration at the target, and from the peak location, we could obtain
. Consequently, we can conclude that the target coherent integration and detection of the proposed method is valid.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}