
Super Directional Antenna—3D Phased Array Antenna Based on Directional Elements


Abstract
:1. Introduction
2. Background
2.1. Super Directive Array Theory
2.2. Super Directive Array Design Algorithm
3. Yagi–Uda Array Element
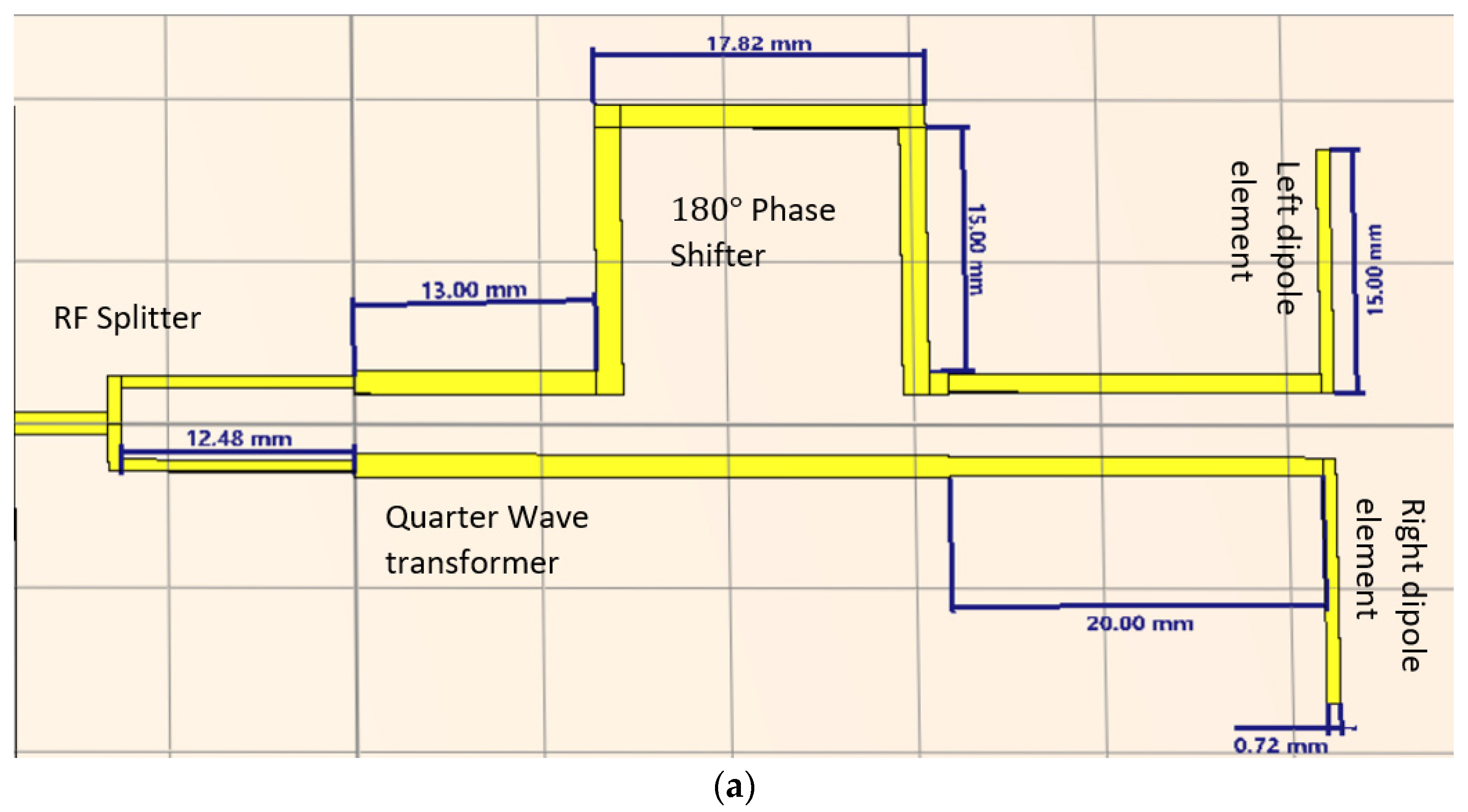
3.1. Typical Element
3.2. Directive Element
3.3. Element Measurement
3.3.1. Coupling Measurements
3.3.2. Gain and Beamwidth Measurements
3.4. Algorithm for the Array Pattern Simulation
4. Three-Dimensional Active Electronic Scanned Array Simulations
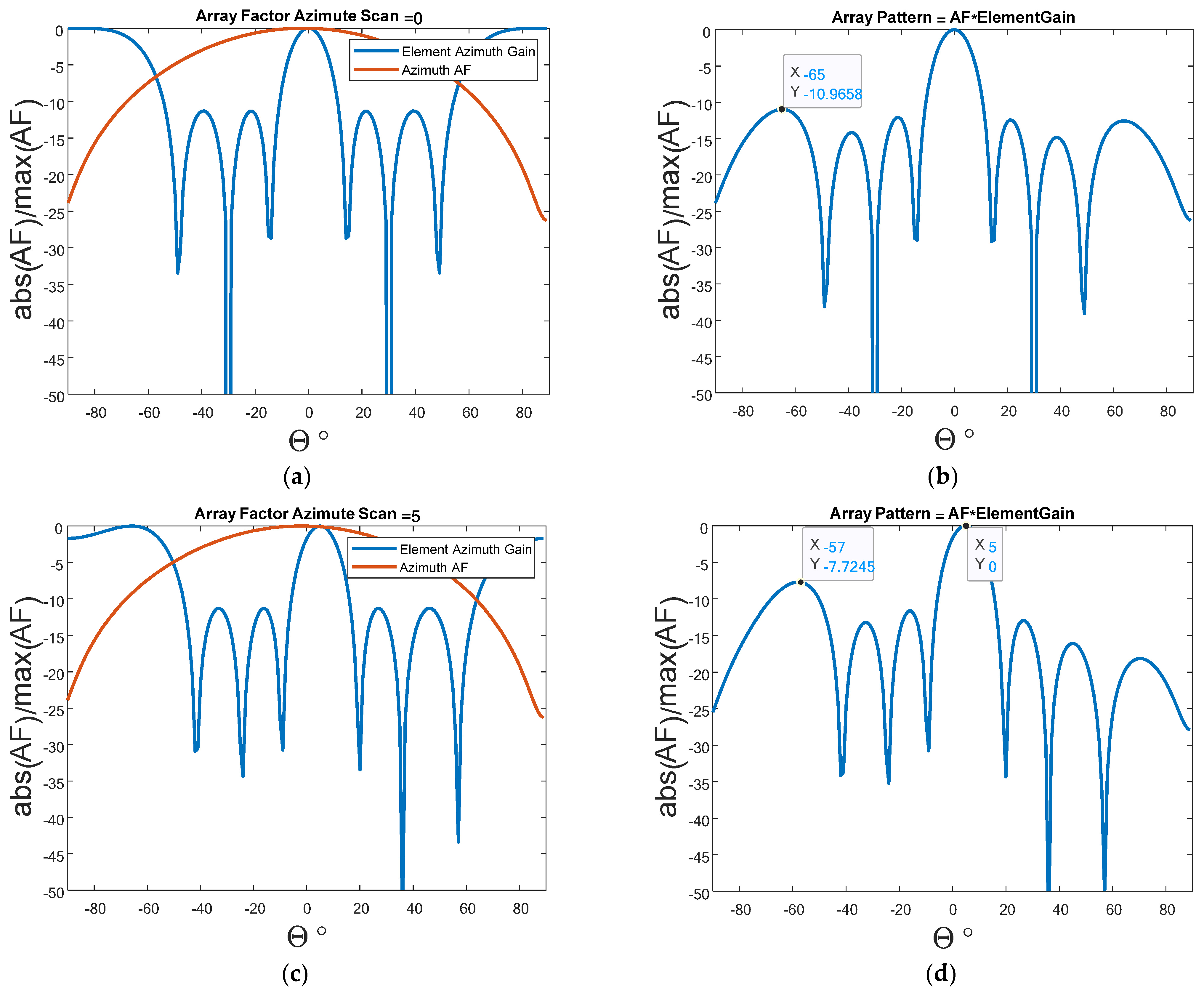
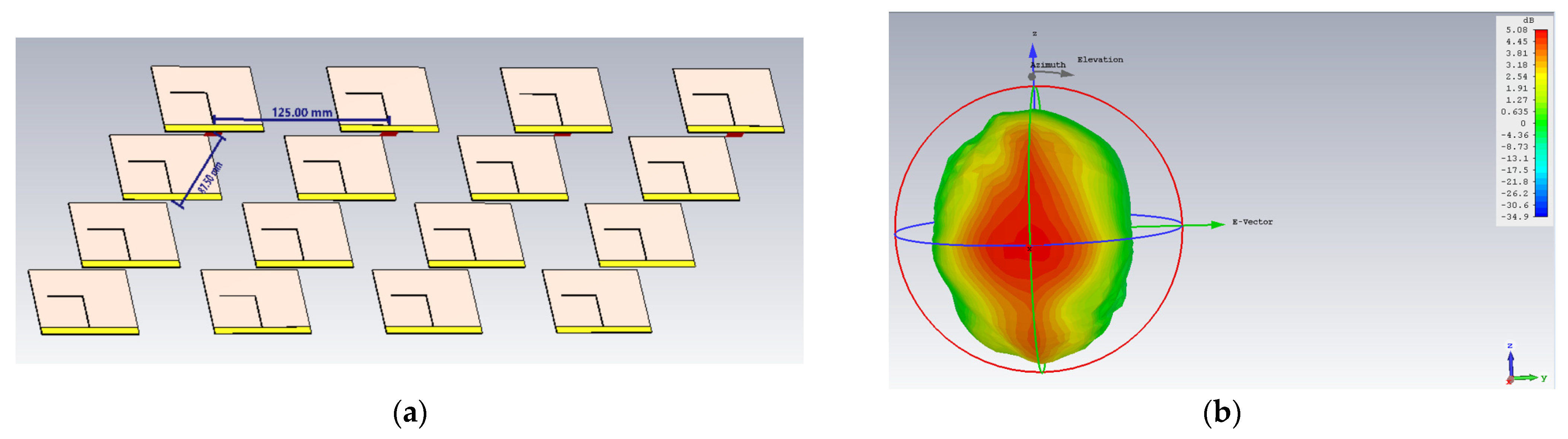
4.1. Array Factor and Array Pattern Simulations
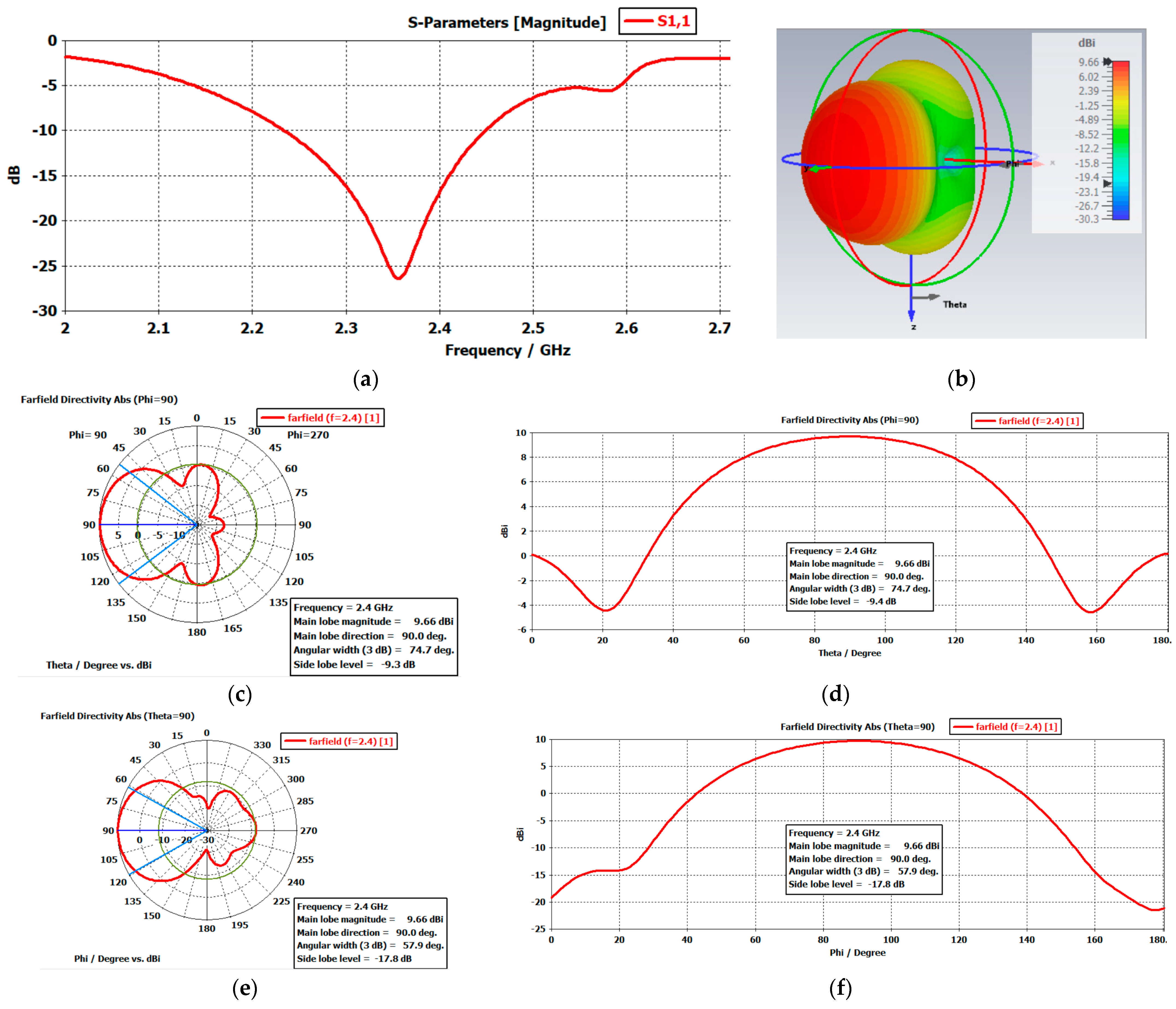
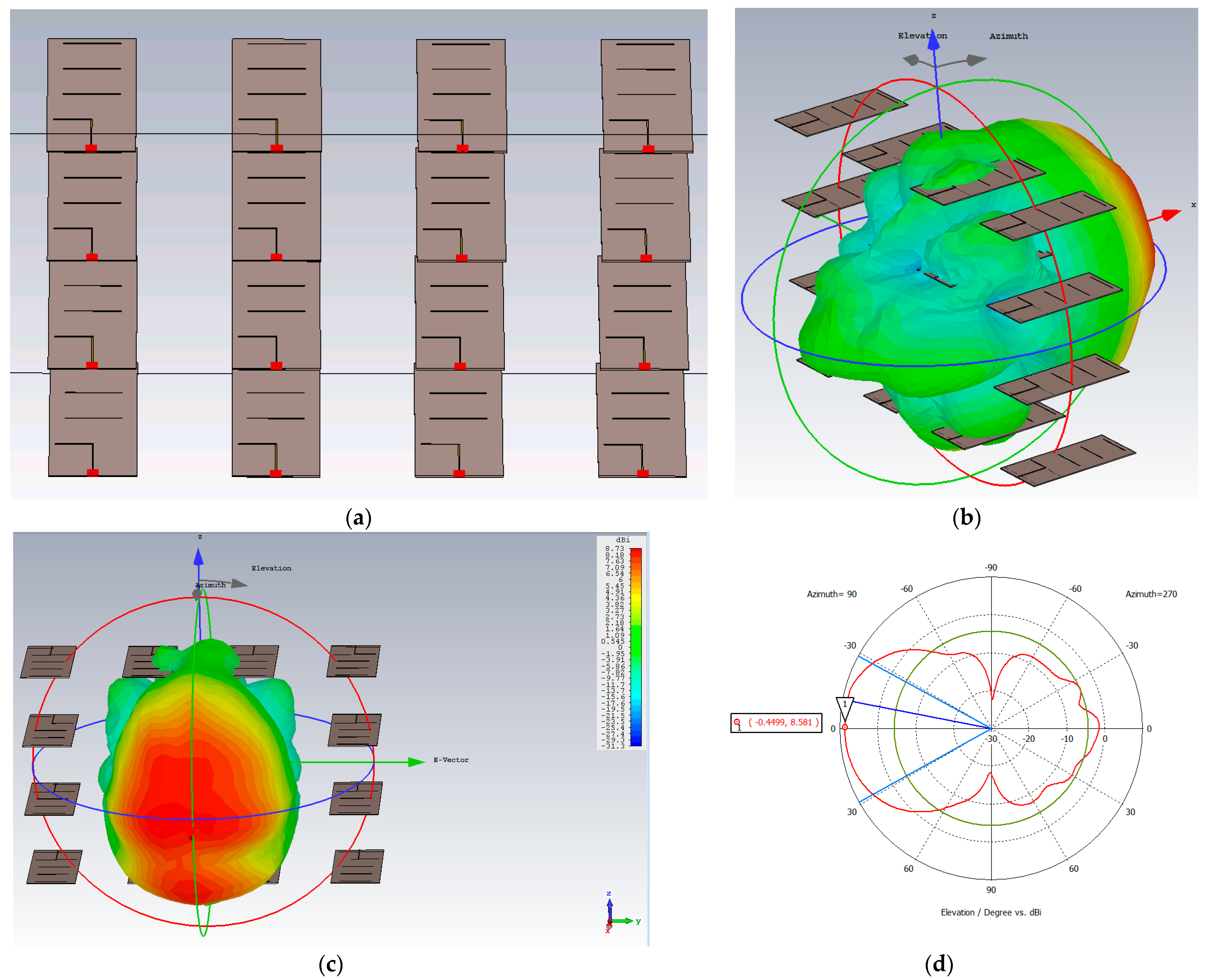
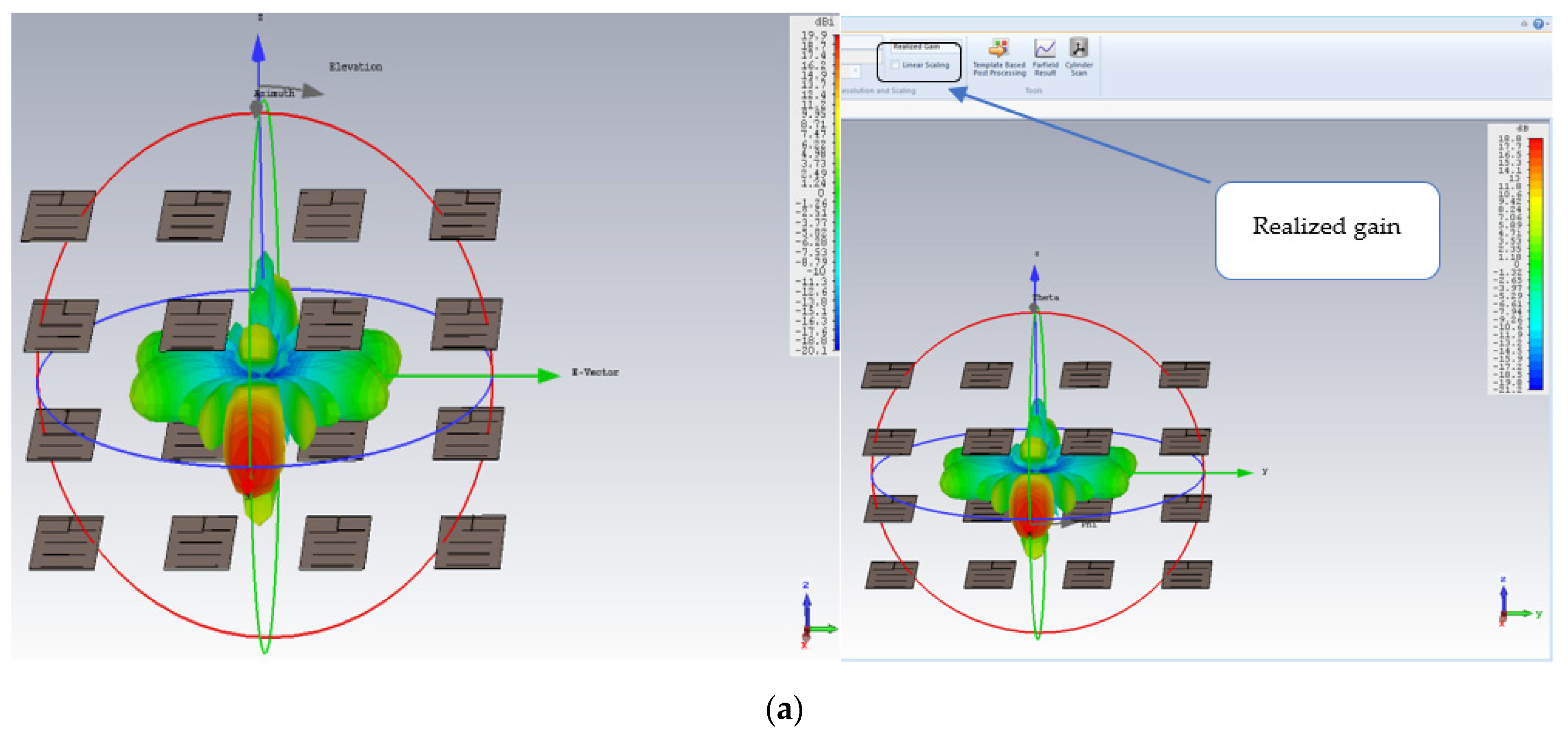
4.2. Dipole and Yagi–Uda Array Electromagnetic Simulations
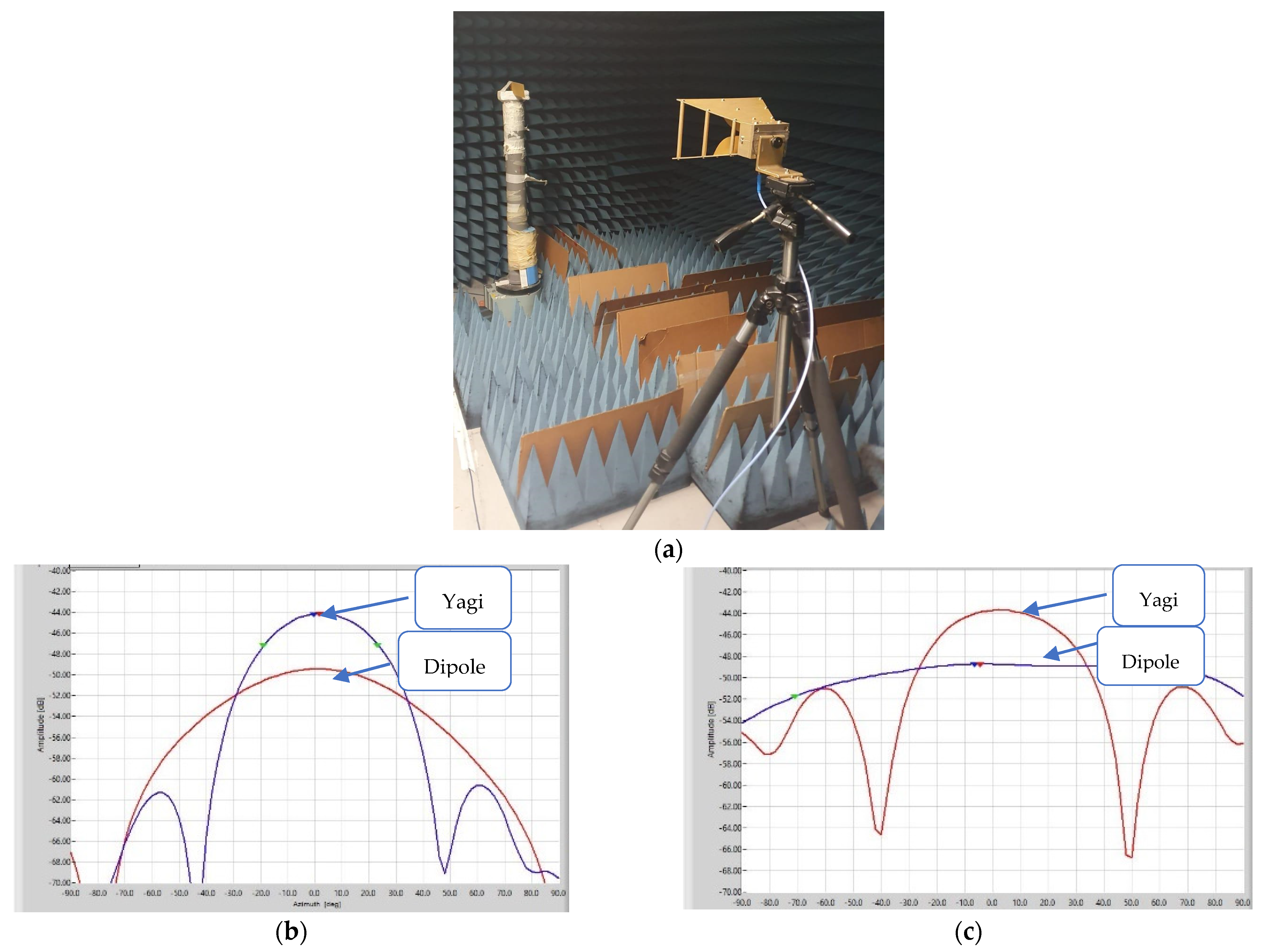
5. Three-Dimensional Active Electronic Scanned Array Measurements
5.1. Dipole Array vs. Yagi–Uda Array Measurement without Scanning
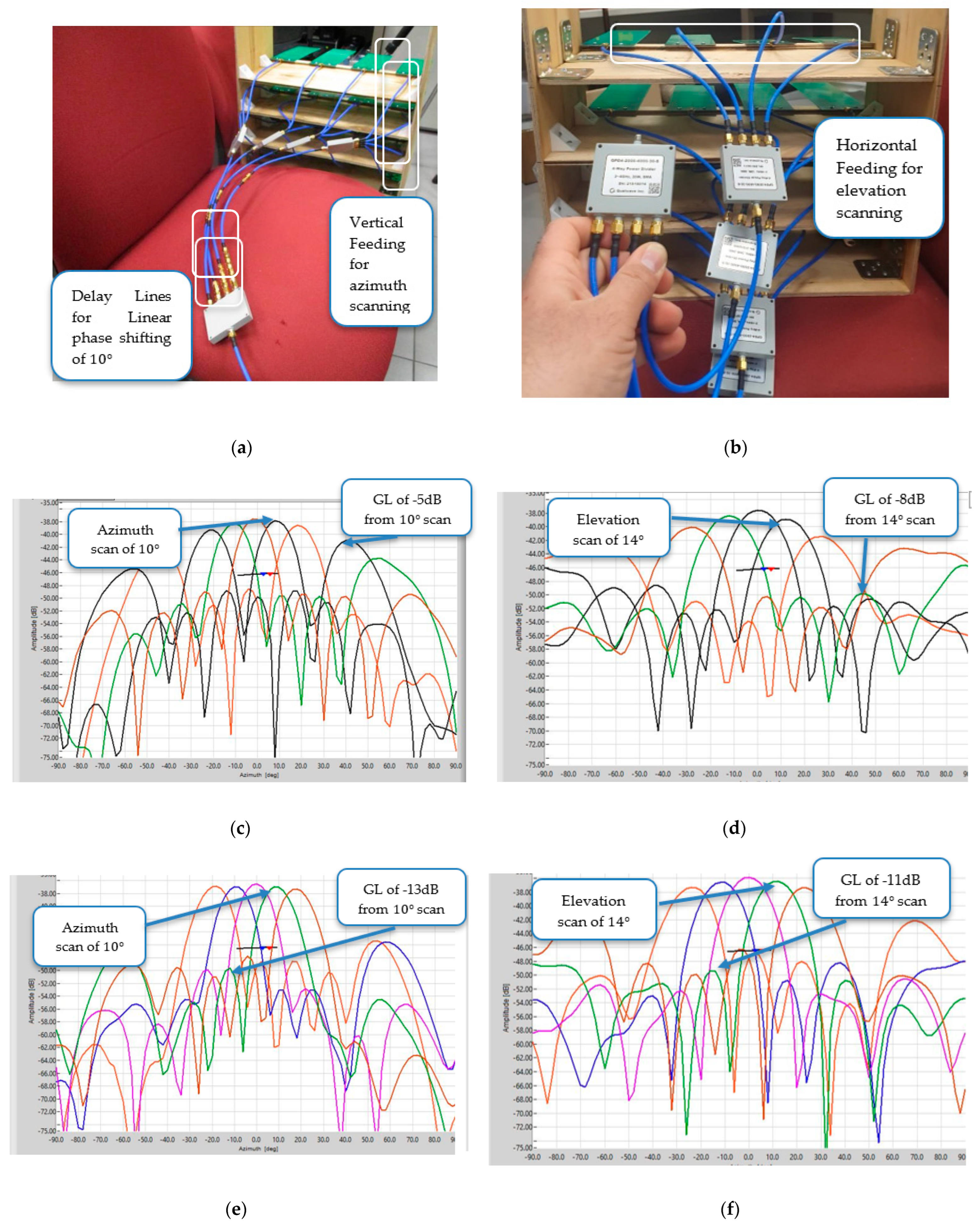
5.2. Dipole Array vs. Yagi–Uda Array Measurements with Scanning
5.3. Efficiency
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brookner, E. Developments and breakthroughs in radars and phased-arrays. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar]
- Buttazzoni, G.; Babich, F.; Vatta, F.; Comisso, M. Geometrical synthesis of sparse antenna arrays using compressive sensing for 5G IoT applications. Sensors 2020, 20, 350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bocon, P.; McGree, T.; Renfro, J. Phased Array Performance Characteristics and Compliance with Satcom Military Standards. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005. [Google Scholar]
- Haupt, R. Phase-only adaptive nulling with a genetic algorithm. IEEE Trans. Antennas Propag. 1997, 45, 1009–1015. [Google Scholar] [CrossRef] [Green Version]
- Cheston, T.C.; Frank, J. Phased Array Radar Antennas. In Radar Handbook, 2nd ed.; Skolnik, M.I., Ed.; McGraw-Hill: Boston, MA, USA, 1990; pp. 7.1–7.36. [Google Scholar]
- Hansen, R.C. Basic Array Characteristics. In Phased Array Antennas, 2nd ed.; Chang, K., Ed.; WILEY: Hoboken, NJ, USA, 2009; pp. 7–40. [Google Scholar]
- Singh, H.; Sneha, H.L.; Jha, R.M. Mutual coupling in phased arrays: A review. Int. J. Antennas Propag. 2013, 2013, 348123. [Google Scholar] [CrossRef] [Green Version]
- Balanis, C.A. Arrays: Linear, planar, and circular. In Antenna Theory, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1997; pp. 266–270. [Google Scholar]
- Baktır, Y. Investigation of Superdirective Antenna Arrays. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2009. [Google Scholar]
- Dawoud, M.; Hassan, M. Design of superdirective endfire antenna arrays. IEEE Trans. Antennas Propag. 1989, 37, 796–800. [Google Scholar] [CrossRef] [Green Version]
- Tai, C. The optimum directivity of uniformly spaced broadside arrays of dipoles. IRE Trans. Antennas Propag. 1964, 12, 447–454. [Google Scholar] [CrossRef]
- Eibert, T.F. Fundamentals of Antennas, Arrays, and Mobile Communications. In Antenna Engineering Handbook, 4th ed.; Volakis, J.L., Ed.; McGraw-Hill: New York, NY, USA, 2007; pp. 3–23. [Google Scholar]
- Haskou, A.; Sharaiha, A.; Collardey, S. Design of Small Parasitic Loaded Superdirective End-Fire Antenna Arrays. IEEE Trans. Antennas Propag. 2015, 63, 5456–5464. [Google Scholar] [CrossRef] [Green Version]
- Wideband Pattern Reconfigurable Printed-Yagi Antenna Array Based on Feed Structure. Available online: https://www.scielo.br/j/jmoea/a/xYZNm9pH7kxF6FBbshzPv8L/?format=html (accessed on 1 July 2022).
- Huizing, A.G. Scalable multifunction RF system: Combined vs. separate transmit and receive arrays. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Cohen, D.; Cohen, D.; Eldar, Y.C. High resolution FDMA MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2806–2822. [Google Scholar] [CrossRef] [Green Version]
- Levanon, N. Radar Principles; John Wiley & Sons: New York, NY, USA, 1988; pp. 4–5. [Google Scholar]
- Kildal, P.S. Array antennas. In Foundation of antenna engineering; Kildal Antenn AB: Gothenburg, Swedan, 2015; pp. 346–348. [Google Scholar]
- Elliott, R.S. The Design of Feeding Structures for Antenna Elements and Arrays. In Antenna Theory and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003; pp. 355–358. [Google Scholar]
- Chen, G.-Y.; Sun, J.-S. A printed dipole antenna with microstrip tapered balun. Microw. Opt. Technol. Lett. 2004, 40, 344–346. [Google Scholar] [CrossRef]
- Richards, M.A. Introduction to Radar Systems. In Fundamentals of Radar Signal Processing; McGraw-Hill Education: New York, NY, USA, 2005; p. 16. [Google Scholar]
- Collin, R.E. Antennas and Radiowave Propagation; McGraw Hill: New York, NY, USA, 1985. [Google Scholar]
- Kaschel, H.; Ahumada, C. Design of Rectangular Microstrip Patch Antenna for 2.4 GHz applied a WBAN. In Proceedings of the 2018 IEEE International Conference on Automation/XXIII Congress of the Chilean Association of Automatic Control (ICA-ACCA), Concepcion, Chile, 17–19 October 2018; pp. 1–6.1. [Google Scholar]
- Zucker, F.J. Fundamentals of Antennas, Surface-Wave Antennas. In Antenna Engineering Handbook, 4th ed.; Volakis, J.L., Ed.; McGraw-Hill: New York, NY, USA, 2007; pp. 10–14. [Google Scholar]
- Elliott, R.S. Linear array analysis. In Antenna Theory and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003; p. 125. [Google Scholar]
- Wallace, R.; Dunbar, S. 2.4 GHz YAGI PCB Antenna; Texas Instrument Application Note DN034. Available online: https://www.ti.com.cn/cn/lit/an/swra350/swra350.pdf (accessed on 1 July 2022).
- Ertas, M.; Siva, A.; Dalkara, T.; Uzuner, N.; Dora, B.; Inan, L.; Idiman, F.; Sarica, Y.; Selçuki, D.; Oğuzhanoğlu, A.; et al. Validity and Reliability of the Turkish Migraine Disability Assessment (MIDAS) Questionnaire. Headache J. Head Face Pain 2004, 44, 786–793. [Google Scholar] [CrossRef] [PubMed]
- Elliott, R.S. Linear array: Synthesis. In Antenna Theory and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003; p. 156. [Google Scholar]
- do Nascimento Silva, C.; de Melo, D.L.; de Oliveira, J.A.; da Silva, A.L.A.; de Oliveira, A.B.; Barboza, A.G.; do Nascimento, D.L.S.; de Filgueiras Gomes, D.; de Melo, M.T.; Kleinau, B.A.; et al. Analysis of a Linear Modified Yagi-Uda array using Particle Swarm Optimization for the Radiation Pattern Synthesis. In Proceedings of the 2021 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel Aviv, Israel, 1–3 November 2021; pp. 395–400. [Google Scholar]
- Savy, L.; Lesturgie, M. Coupling effects in MIMO phased array. In Proceedings of the 2016 IEEE Radar Conference (Radar-Conf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Chen, X.; Zhang, S.; Li, Q. A Review of Mutual Coupling in MIMO Systems. IEEE Access 2018, 6, 24706–24719. [Google Scholar] [CrossRef]
- Steyskal, H. Digital beamforming. In Proceedings of the 1988 18th European Microwave Conference, Stockholm, Sweden, 15 September 1988; pp. 49–57. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Denotation | Symbol | Value |
|---|---|---|
| Operating frequency | fo | 2.4 GHz |
| Beamwidth Az/El | BW | Az = 12.5 deg; El = 18 deg; |
| Scan aperture | <40 deg | |
| Directivity | D | 20 dB |
| Bandwidth | B | 200 MHz |
| Side lobe level | SLL | <−10 dB |
| Element number in Azimuth | Nx | 4 |
| Element number in Elevation | Nz | 4 |
| Denotation | Symbol | Value |
|---|---|---|
| Operating frequency | fo | 2.4 GHz |
| Dielectric substrate | FR4—4.3 | |
| Thickness | t | 0.035 mm |
| Height of the dielectric substrate | h_sub | 1 mm |
| Return loss | S11 | <−15 dB |
| Impedance of the antenna | dipole | 73 Ohms |
| Directivity | D | 9 |
| Beamwidth | BW | 60 deg |
| Denotation | Symbol | Value |
|---|---|---|
| 50 ohms transition Line length | L_50_ohms | 5 mm |
| 50 ohms transition Line width | W_50_ohms | 1.9 mm |
| Rectangular ground width | W_ground | 35 mm |
| Quarter wave transformer length | L_quarter | 24.25 mm |
| Quarter wave transformer width | W_quarter | 0.6 mm |
| Dipole width | W_driver | 0.6 mm |
| Half Dipole length | L_driver | 25.77 mm |
| Parameter | Symbol | Value |
|---|---|---|
| 50 ohms transition line length | L_50_ohms | 5 mm |
| 50 ohms transition line width | W_50_ohms | 1.9 mm |
| Rectangular ground width | W_ground | 35 mm |
| Quarter wave transformer length | L_quarter | 26 mm |
| Quarter wave transformer width | W_quarter | 0.8 mm |
| Dipole width | W_driver | 0.8 mm |
| Half dipole length | L_driver | 25.8 mm |
| Substrate width | W_sub | 60 mm |
| Substrate length | L_sub | 120 mm |
| Director width | W_director | 0.6 mm |
| Director width | L_director | 39 |
| Director distance | D_directors | 27 |
| Number of directors | #Directors | 3 |
| Element’s Distance | Vertical | Horizontal |
|---|---|---|
| −18 dB | −22 dB | |
| −19 dB | −23 dB | |
| −21 dB | −24 dB | |
| −23 dB | −26 dB | |
| −26 dB | −29 dB | |
| −26 dB | −31 dB | |
| −34 dB | −44 dB |
| Antenna Type | Az/El | Measured Gain | Measured Directivity (Gain + Loss) | D0 = 4πA/λ² | η Aperture |
|---|---|---|---|---|---|
| Dipole | Azimuth | 15.5 dBi | 17.5 dBi | 20.3 dBi | −3 dB |
| Dipole | Elevation | 15 dBi | 17 dBi | 20.3 dBi | −3.3 dB |
| Yagi–Uda | Azimuth | 17.3 dB | 19.3 dBi | 20.1 dBi | −0.8 dB |
| Yagi–Uda | Elevation | 17.3 dB | 19.3 dBi | 20.1 dBi | −0.8 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Levy, B.; Levine, E.; Pinhasi, Y. Super Directional Antenna—3D Phased Array Antenna Based on Directional Elements. Electronics 2022, 11, 2233. https://doi.org/10.3390/electronics11142233
Levy B, Levine E, Pinhasi Y. Super Directional Antenna—3D Phased Array Antenna Based on Directional Elements. Electronics. 2022; 11(14):2233. https://doi.org/10.3390/electronics11142233
Chicago/Turabian StyleLevy, Benzion, Ely Levine, and Yosef Pinhasi. 2022. "Super Directional Antenna—3D Phased Array Antenna Based on Directional Elements" Electronics 11, no. 14: 2233. https://doi.org/10.3390/electronics11142233