
Software in-the-Loop Simulation of an Advanced SVM Technique for 2ϕ-Inverter Control Fed a TPIM as Wind Turbine Emulator


Abstract
:1. Introduction
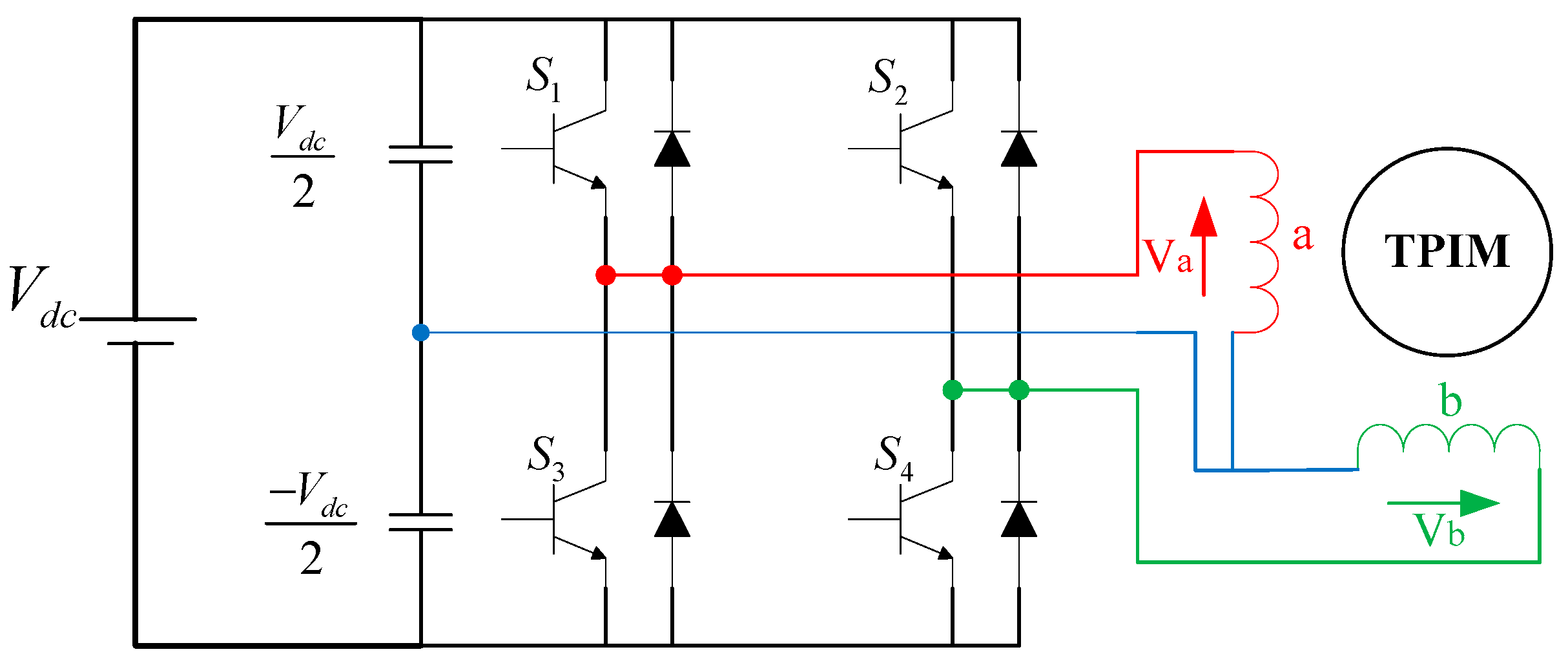
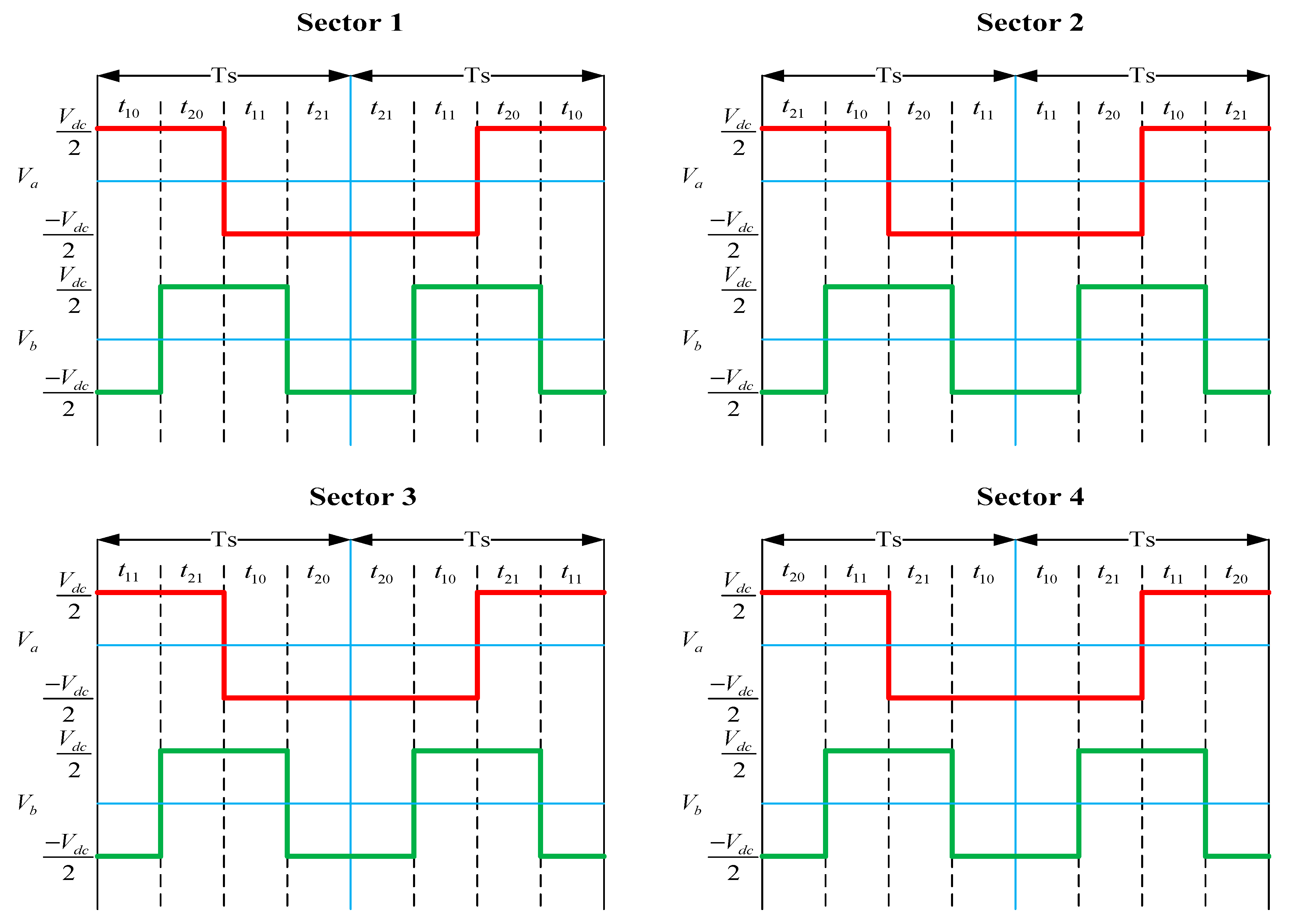
2. Advanced Four Space Vectors Modulations Technique for 2ϕ-Inverter
3. Mathematical Model of the Proposed Wind Turbine Emulator
3.1. Mathematical Model of the Proposed Wind Turbine Emulator
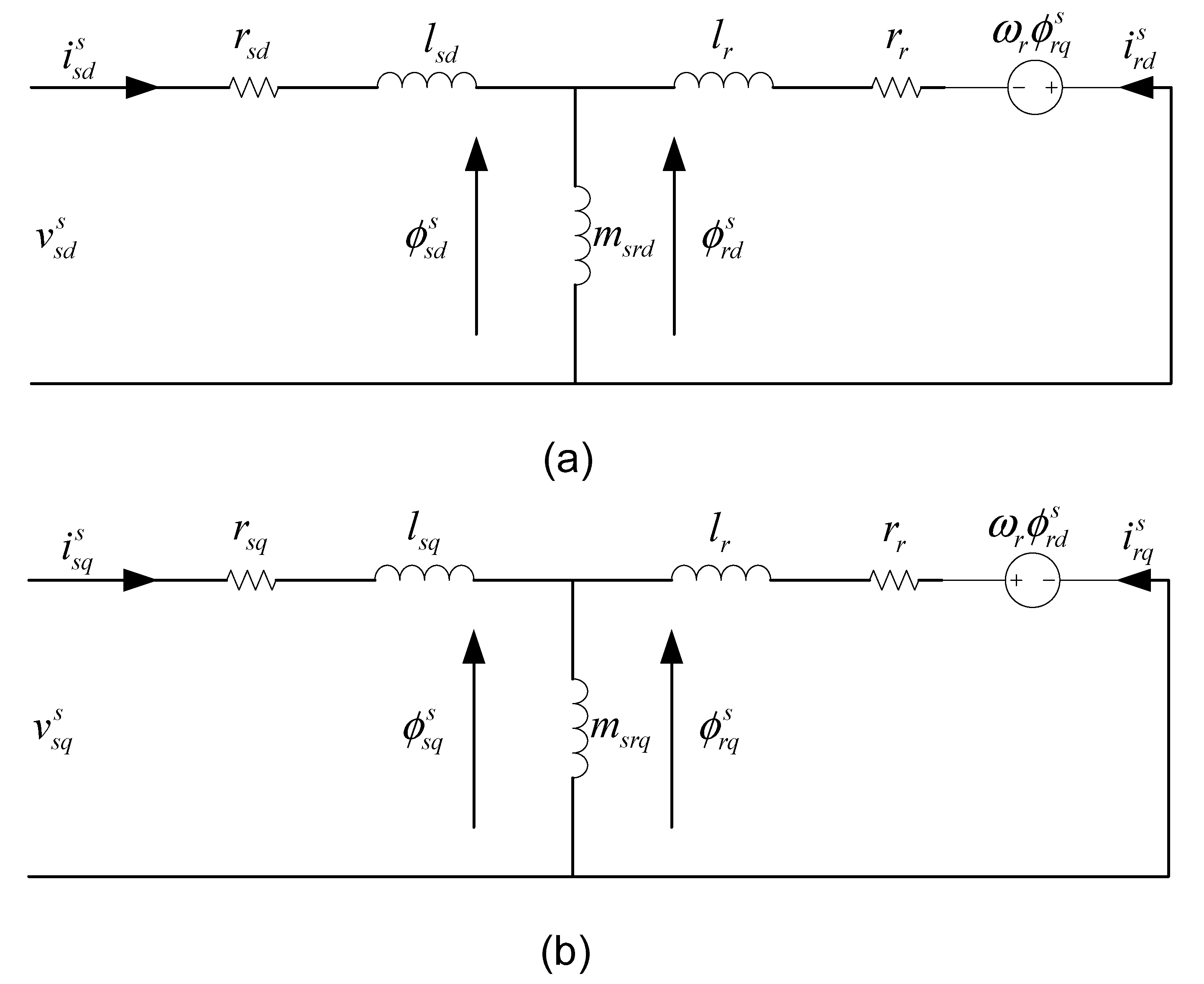
3.2. IRFOC for Symmetrical TPIM Operation
3.3. Wind Turbine Mathematical Model
4. Software in-the-Loop Simulation and Results
4.1. First Test: Linear Constant WT Speed
4.2. Second Test: Sinusoidal WT Speed
4.3. Quantitative Study of the Speed and Torque Error Rates
5. Advanced SVM Modeling with XSG for FPGA-Based WTE Digital Control
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sinsel, S.R.; Riemke, R.L.; Hoffmann, V.H. Challenges and solution technologies for the integration of variable renewable energy sources—A review. Renew. Energy 2020, 145, 2271–2285. [Google Scholar] [CrossRef]
- Nematollahi, O.; Hoghooghi, H.; Rasti, M.; Sedaghat, A. Energy demands and renewable energy resources in the Middle East. Renew. Sustain. Energy Rev. 2016, 54, 1172–1181. [Google Scholar] [CrossRef]
- Awad, A.S.A.; Ahmed, M.H.; El-Fouly, T.H.M.; Salama, M.M.A. The impact of wind farm location and control strategy on wind generation penetration and market prices. Renew. Energy 2017, 106, 354–364. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Ajirlo, K.S.; Tari, P.H.; Gharali, K.; Zandi, M. Development of a wind turbine simulator to design and test micro HAWTs. Sustain. Energy Tech. Assess. 2020, 43, 100900. [Google Scholar]
- Gloe, A.; Jauch, C.; Craciun, B.; Winkelmann, J. Continuous provision of synthetic inertia with wind turbines: Implications for the wind turbine and for the grid. IET Renew. Power Gener. 2019, 13, 668–675. [Google Scholar] [CrossRef]
- Willis, D.J.; Niezrecki, C.; Kuchma, D.; Hines, E.; Arwade, S.R.; Barthelmie, R.J.; DiPaola, M.; Drane, P.J.; Hansen, C.J.; Inalpolat, M.; et al. Wind energy research: State-of-the-art and future research directions. Renew. Energy 2018, 125, 133–154. [Google Scholar] [CrossRef]
- Nichita, C.; Luca, D.; Dakyo, B.; Ceanga, E. Large band simulation of the wind speed for real time wind turbine simulators. IEEE Trans. Energy Convers. 2002, 17, 523–529. [Google Scholar] [CrossRef]
- Pillay, P.; Krishnan, R. Modeling of Permanent Magnet Motor Drives. IEEE Trans. Ind. Electron. 1988, 35, 537–541. [Google Scholar] [CrossRef] [Green Version]
- Tarimer, I.; Ocak, C. Performance Comparision of Internal and External Rotor Structured Wind Generators Mounted from Same Permanent Magnets on Same Geometry. Elektronika Ir Elektrotechnika 2009, 92, 65–70. [Google Scholar]
- Tanvir, A.; Merabet, A.; Beguenane, R. Real-Time Control of Active and Reactive Power for Doubly Fed Induction Generator (DFIG)-Based Wind Energy Conversion System. Energies 2015, 8, 10389–10408. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Tang, W.; Xiahou, K.; Wu, Q. Development of Novel Robust Regulator for Maximum Wind Energy Extraction Based upon Perturbation and Observation. Energies 2017, 10, 569. [Google Scholar] [CrossRef] [Green Version]
- Diaz, S.A.; Silva, C.; Juliet, J.; Miranda, H.A. Indirect sensorless speed control of a PMSG for wind application. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1844–1850. [Google Scholar]
- Xue, X.; Bu, Y.; Lu, B. Development of a nonlinear wind-turbine simulator for LPV control design. In Proceedings of the 2015 IEEE Green Energy and Systems Conference (IGESC), Long Beach, CA, USA, 9 November 2015; pp. 41–48. [Google Scholar]
- Martínez-Márquez, C.I.; Twizere-Bakunda, J.D.; Lundback-Mompó, D.; Orts-Grau, S.; Gimeno-Sales, F.J.; Seguí-Chilet, S. Small Wind Turbine Emulator Based on Lambda-Cp Curves Obtained under Real Operating Conditions. Energies 2019, 12, 2456. [Google Scholar] [CrossRef] [Green Version]
- Kariyawasam, K.; Karunarathna, K.; Karunarathne, R.; Kularathne, M.; Hemapala, K. Design and Development of a Wind Turbine Simulator Using a Separately Excited DC Motor. Smart Grid Renew. Energy 2013, 4, 259–265. [Google Scholar] [CrossRef]
- Seman, S.; Iov, F.; Niiranen, J.; Arkkio, A. Comparison of simulators for variable-speed wind turbine transient analysis. Inter. J. Energy Res. 2009, 30, 713–728. [Google Scholar] [CrossRef]
- Behera, P.K.; Mendi, B.; Sarangi, S.K.; Pattnaik, M.; IEEE, S.M. Robust wind turbine emulator design using sliding mode controller. Renew Energy Focus 2021, 36, 79–88. [Google Scholar] [CrossRef]
- Martinez, F.; Herrero, L.C.; Pablo, S.D. Open loop wind turbine emulator. Renew. Energy 2014, 63, 212–221. [Google Scholar] [CrossRef]
- Liu, B.; Nishikata, S.; Tatsuta, F.; Suzuki, K. A wind turbine simulator considering various moments of inertia using a DC motor. In Proceedings of the 2014 International Symposium on Power Electronics, Electrica Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 866–870. [Google Scholar]
- Hussain, J.; Mishra, M.K. Design and development of real-time small scale wind turbine simulator. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–5. [Google Scholar]
- Kojabadi, H.M.; Chang, L.; Boutot, T. Development of a Novel Wind Turbine Simulator for Wind Energy Conversion Systems Using an Inverter-Controlled Induction Motor. IEEE Trans. Energy Convers. 2004, 19, 547–552. [Google Scholar] [CrossRef]
- Weijie, L.; Minghui, Y.; Rui, Z.; Minghe, J.; Yun, Z. Investigating instability of the wind turbine simulator with the conventional inertia emulation scheme. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 983–989. [Google Scholar]
- Castelló, J.; Espí, J.M.; García-Gil, R. Development details and performance assessment of a Wind Turbine Emulator. Renew. Energy 2016, 86, 848–857. [Google Scholar] [CrossRef]
- Sahoo, N.C.; Satpathy, A.S.; Kishore, N.K.; Venkatesh, B. Dc motor-based wind turbine emulator using LabVIEW for wind energy conversion system laboratory setup. Inter. J. Electr. Eng. Educ. 2013, 50, 111–126. [Google Scholar] [CrossRef]
- Kouadria, S.; Belfedhal, S.; Meslem, Y.; Berkouk, E.M. Development of real time wind Turbine emulator based on dc motor controlled by hysteresis regulator. In Proceedings of the IEEE International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 7–9 March 2013; pp. 246–250. [Google Scholar]
- Ha, V.T.; Phuong, V.H.; Lam, N.T.; Quang, N.P. A deadbeat current controller based Wind turbine emulator. In Proceedings of the IEEE International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 21–23 July 2017; pp. 169–174. [Google Scholar]
- Chen, J.; Yao, W.; Zhang, C.-K.; Ren, Y.; Jiang, L. Design of robust MPPT controller for grid-connected PMSG-Based wind turbine via perturbation observation based nonlinear adaptive control. Renew. Energy 2019, 134, 478–495. [Google Scholar] [CrossRef]
- Mesbahi, A.; Khafallah, M.; Saad, A.; Nouaiti, A. Emulator design for a small wind Turbine driving a self-excited induction generator. In Proceedings of the IEEE International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 15–18 November 2017; pp. 1–6. [Google Scholar]
- Andrzej, J.; Janusz, B. Laboratory setup with squirrel-cage motors for wind turbine emulation. In Proceedings of the IEEE Applications of Electromagnetics in Modern Techniques and Medicine (PTZE), Raclawice, Poland, 9–12 September 2018; pp. 1–4. [Google Scholar]
- Sahoo, S.K.; Mondal, S.; Kastha, D.; Sinha, A.K.; Kishore, N. Wind turbine emulation using doubly fed induction motor. In Proceedings of the IEEE 21st Century Energy Needs Materials, Systems and Applications (ICTFCEN), Kharagpur, India, 17–19 November 2016; pp. 1–5. [Google Scholar]
- Moussa, I.; Khedher, A. A Theoretical and Experimental Study of a Laboratory Wind Turbine Emulator using DC-Motor Controlled by an FPGA-Based Approach. Electr. Power Compon. Syst. 2020, 48, 399–409. [Google Scholar] [CrossRef]
- Ma, Y.; Yang, L.; Wang, J.; Wang, F.; Tolbert, L.M. Emulating full-converter wind turbine by a single converter in a multiple converter based emulation system. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 3042–3047. [Google Scholar]
- Madasamy, P.; Pongiannan, R.K.; Ravichandran, S.; Padmanaban, S.; Chokkalingam, B.; Hossain, E.; Adedayo, Y. A simple multilevel space vector modulation technique and MATLAB system generator built FPGA implementation for three-level neutral-point clamped inverter. Energies 2019, 12, 4332. [Google Scholar] [CrossRef] [Green Version]
- Attique, Q.M.; Li, Y.; Wang, K. A survey on space-vector pulse width modulation for multilevel inverters. CPSS Trans. Power Electron. Appl. 2017, 2, 226–236. [Google Scholar] [CrossRef]
- Jayakumar, V.; Chokkalingam, B.; Munda, J. A Comprehensive Review on Space Vector Modulation Techniques for Neutral Point Clamped Multi-Level Inverters. IEEE Access 2021, 9, 112104–112144. [Google Scholar] [CrossRef]
- Manjrekar, M.D.; Steimer, P.K.; Lipo, T.A. Hybrid multilevel power conversion system: A competitive solution for high-power applications. IEEE Tran. Ind. Appl. 2000, 36, 834–841. [Google Scholar] [CrossRef] [Green Version]
- Jang, D.H.; Yoon, D.Y. Space vector PWM technique for two-phase inverter-fed single-phase induction motors. In Proceedings of the Conference IEEE Industry Applications Conference, Thirty-Forth IAS Annual Meeting, Phoenix, AZ, USA, 3–7 October 1999; pp. 47–53. [Google Scholar]
- Jang, D.H.; Yoon, D.Y. Space-vector PWM technique for two-phase inverter-fed two-phase induction motors. IEEE Trans. Ind. Appl. 2003, 39, 542–549. [Google Scholar] [CrossRef]
- Bhowmik, S.; Spee, R.; Enslin, J.H. Performance optimization for doubly fed wind power generation systems. IEEE Trans. Ind. Appl. 1999, 35, 949–958. [Google Scholar] [CrossRef]
- Benzaouia, S.; Mokhtari, M.; Zouggar, S.; Rabhi, A.; Elhafyani, M.L.; Ouchbel, T. Design and implementation details of a low cost sensorless emulator for variable speed wind turbines. Sustain. Energy Grids Netw. 2021, 26, 100431. [Google Scholar] [CrossRef]
- Abdallah, M.E.; Arafa, O.M.; Shaltot, A.; Aziz, G.A.A. Wind turbine emulation using permanent magnet synchronous motor. J. Electr. Syst. Inf. Technol. 2018, 5, 121–134. [Google Scholar] [CrossRef]
- Jang, D.-H.; Won, J.-S. Voltage, frequency, and phase-difference angle control of PWM inverters-fed two-phase induction motors. IEEE Trans. Power Electron. 1994, 9, 377–383. [Google Scholar] [CrossRef]
- Moussa, I.; Bouallegue, A.; Khedher, A. New wind turbine emulator based on DC machine: Hardware implementation using FPGA board for an open-loop operation. IET Circuits Devices Syst. 2019, 13, 896–902. [Google Scholar] [CrossRef]
- Moussa, I.; Bouallegue, A.; Khedher, A. Design and Implementation of constant wind speed turbine emulator using Matlab/simulink and FPGA. In Proceedings of the Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monaco, France, 25–27 March 2014; pp. 1–8. [Google Scholar]
- Moussa, I.; Khedher, A. Fuzzy Logic Controller Hardware Implementation using XSG tools Applied to a Variable Speed Wind Turbine Emulator. In Proceedings of the International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Moussa, I.; Khedher, A. Real-time WTE using FLC Implementation on FPGA board: Theoretical and Experimental Studies. In Proceedings of the 17th International Multi-Conference on Systems, Signals & Devices (SSD), Sfax, Tunisia, 20–23 July 2020; pp. 428–433. [Google Scholar]
- Dolan, D.S.; Zepeda, D.; Taufik, T. Development of wind tunnel for laboratory wind turbine testing. In Proceedings of the North American Power Symposium, Boston, MA, USA, 4–6 August 2011; pp. 1–5. [Google Scholar]
- Bagh, S.; Samuel, P.; Sharma, R.; Banerjee, S. Emulation of static and dynamic Characteristics of a wind turbine using matlab/Simulink. In Proceedings of the 2nd International Conference on Power, Control and Embedded Systems, Allahabad, India, 17–19 December 2012; pp. 1–6. [Google Scholar]
- Imran, R.M.; Akbar Hussain, D.M.; Soltani, M. DAC with LQR control design for pitch regulated variable speed wind turbine. In Proceedings of the IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–6. [Google Scholar]
- Lim, C.W. A demonstration on the similarity of pitch response between MW wind turbine and small-scale simulator. Renew. Energy 2018, 144, 68–76. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Prime Motor | Converter Type | Controller Use | Observer Use | Supports | Required Measurements Type and Number |
|---|---|---|---|---|---|---|
| [40] | DCM | Thyristorized bidirectional rectifier | Required (PI controller) | No observer used | DSP | Current Torque Speed |
| [24] | DCM | DC/DC converter | Required (PI controller) | No observer used | dSPACE | Speed Current |
| [32] | DCM | DC/DC buck converter | Required (PI controller) | No observer used | FPGA | Speed Current |
| [41] | DCM | DC/DC boost converter | Not required | Required (STA-SMO observer) | dSPACE | Voltage Current |
| [42] | PMSM | Three-phase IGBT inverter | Required (PI controller) | No observer used | dSPACE | Position Two current |
| [22] | SCIM | Three-phase IGBT inverter | Required (PI controller) | No observer used | Intel 80C196KD µc | Torque Speed |
| This work | 2ϕIM | Two-phase IGBT inverter | Required (PI controller) | No observer used | FPGA | Speed Two current |
| State | Time Switching during 2 × Ts | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| t10 | t20 | t11 | t21 | t10 | t20 | t11 | t21 | ||
| Sector 1 | tA | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| tB1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | |
| tB2 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | |
| Sector 2 | tA | 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |
| tB1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | |
| tB2 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | |
| Sector 3 | tA | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| tB1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
| tB2 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | |
| Sector 4 | tA | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 |
| tB1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | |
| tB2 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | |
| Parameters | Values |
|---|---|
| C1 | 0.5 |
| C2 | 0.00167 |
| C3, C8, C11 | 2 |
| C4 | 3.14 |
| C5 | 0.1 |
| C6 | 18.5 |
| C7 | 0.3 |
| C9 | 0.00184 |
| C10 | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moussa, I.; Khedher, A. Software in-the-Loop Simulation of an Advanced SVM Technique for 2ϕ-Inverter Control Fed a TPIM as Wind Turbine Emulator. Electronics 2022, 11, 187. https://doi.org/10.3390/electronics11020187
Moussa I, Khedher A. Software in-the-Loop Simulation of an Advanced SVM Technique for 2ϕ-Inverter Control Fed a TPIM as Wind Turbine Emulator. Electronics. 2022; 11(2):187. https://doi.org/10.3390/electronics11020187
Chicago/Turabian StyleMoussa, Intissar, and Adel Khedher. 2022. "Software in-the-Loop Simulation of an Advanced SVM Technique for 2ϕ-Inverter Control Fed a TPIM as Wind Turbine Emulator" Electronics 11, no. 2: 187. https://doi.org/10.3390/electronics11020187
APA StyleMoussa, I., & Khedher, A. (2022). Software in-the-Loop Simulation of an Advanced SVM Technique for 2ϕ-Inverter Control Fed a TPIM as Wind Turbine Emulator. Electronics, 11(2), 187. https://doi.org/10.3390/electronics11020187