Abstract
Aiming at the trajectory tracking problem with unknown uncertainties, a novel controller composed of proportional-integral-differential sliding mode surface (PIDSM) and variable gain hyperbolic reaching law is proposed. A PID-type sliding mode surface with an inverse hyperbolic integral terminal sliding mode term is proposed, which has the advantages of global convergence of integral sliding mode (ISM) and finite time convergence of terminal sliding mode (TSM), and the control effect is significantly improved. Then, a variable gain hyperbolic approach law is proposed to solve the sliding mode approaching velocity problem. The variable gain term can guarantee different approaching velocities at different distances from the sliding mode surface, and the chattering problem is eliminated by using a hyperbolic function instead of the switching function. The redesign of the sliding mode surface and the reaching law ensures the robustness and tracking accuracy of the uncertain system. Adaptive estimation can compensate for uncertain disturbance terms in nonlinear systems, and the combination with sliding mode control further improves the tracking accuracy and robustness of the system. Finally, the Lyapunov stability principle is used for stability analysis, and the simulation study verifies that the proposed control scheme has the advantages of fast response, strong robustness, and high tracking accuracy.
1. Introduction
Most of the controlled systems at work are second-order nonlinear systems, which will be affected by internal uncertainties and external disturbances, resulting in a decline in output performance []. In order to improve the control performance, many effective control schemes have been proposed, including adaptive control [,], optimal control [,,], backstepping control [,], intelligent control [,], model predictive control (MPC) [,], and sliding mode control [,,], etc. Because of the advantages of good transient performance, strong robustness to parameter changes, and insensitivity to disturbances, sliding mode control has been widely used in practical work. The basic idea of sliding mode control is to establish a sliding mode manifold, which abstracts the controlled system into a form that keeps moving on the sliding mode surface. However, traditional linear sliding mode surfaces rely on high gain switching terms to ensure asymptotic convergence, resulting in chattering. In order to reduce the output chattering and steady-state error, the sliding mode surface and the reaching law are redesigned respectively. In order to solve the lumped disturbance term in the nonlinear system, the disturbance term must be compensated with the disturbance estimation method. The disturbance estimation methods mainly include adaptive estimation [,], observer estimation [], and neural network approximation []. Compared with the other two estimation methods, adaptive estimation achieves a better estimation effect with fewer computing resources.
Many scholars have their ideas on the design of sliding surfaces. TSM and ISM are the most widely used. TSM can guarantee finite-time convergence of the control system, but the fractional power term will have singularities. Therefore, a non-singular terminal sliding mode control (NTSM) scheme was proposed []. NTSM control has the advantages of limited time convergence, avoidance of singular points, and has a faster convergence rate when far away from the origin, while ISM has the advantage of global convergence. In [], a robust adaptive integral terminal sliding mode (AITSM) control scheme with an uncertainty observer for electronic throttle systems is proposed, which uses a novel integral terminal sliding surface to ensure the closed-loop system is forced to start from the sliding surface, thereby ensuring good error convergence and tracking accuracy. To ensure that the ISM surface can quickly converge to zero in a finite time without singularity problems and control input is continuous in [], a second-order integral terminal sliding mode (ITSM) surface combining an ISM surface and a fast non-singular integral terminal sliding mode surface is proposed. A recursive structure ITSM consisting of a non-singular terminal sliding mode and a fractional power integral terminal sliding mode is proposed in [], where the approach control input is obtained in the form of an integral rather than a signal function, and the system state is obtained from the sliding surface starts and then converges to the origin in a finite time. The combination of terminal sliding mode and integral sliding mode can obtain a better control effect. NTSM with the inverse hyperbolic tangent function was proposed in [], which guarantees the system state to converge to the origin in a finite time and guarantees a faster convergence rate. A practical TSM constructed based on a hyperbolic tangent function nested with terminal attractors is proposed in [], which guarantees a Lipschitz continuous but steep slope generalized velocity at the origin. Therefore, terminal sliding mode with hyperbolic function can effectively improve the control effect. This research innovatively proposes a PID-type integral terminal sliding mode manifold with an inverse hyperbolic tangent function.
The important role of the sliding surface in the controller has been outlined above, and the reaching law plays a crucial role in reaching the sliding surface velocity and reducing the chattering effect. In [], an exponential reaching law for the nonlinear multivariable coupled system of a permanent magnet synchronous motor is proposed, which improves the dynamic response performance and robustness of the permanent magnet synchronous motor control system and reflects the effect of the reaching law on the important role of the control system. In [], a reaching law including the system state variables and the sliding mode surface is proposed. There are two different representations in the reaching process, which improves the reaching speed of the system, which improves the reaching speed of the system and show that the method of introducing system state variables into the reaching law is effective. In [], the hyperbolic reaching law proposed for the sluggish transient behavior of quadrotors eliminates buffeting while guaranteeing a dynamic response. In [], a continuous reaching law using two hyperbolic functions with similar rates of change and opposite amplitudes was proposed, namely, the inverse hyperbolic sine function and the hyperbolic tangent function, which ensured the fast convergence of the algorithm and no chattering characteristics. In [], a reaching law based on an inverse hyperbolic function and a variable gain term is proposed, and a sliding mode manifold is introduced in the variable gain term; when the system state converges to the surface, better control can be achieved due to the reduction of the gain term. This paper proposes a hyperbolic approach law with variable gain similar to [], which has different approach speeds according to the distance from the sliding mode surface and eliminates chattering.
Aiming at the tracking problem of uncertain control systems, we innovatively propose a control scheme based on a PID-type sliding surface with an inverse hyperbolic integral terminal term and a variable gain hyperbolic reaching law that can obtain a good tracking effect under uncertain conditions. The main contributions of this paper are as follows: (1) Combining the advantages of ISM and TSM, this study innovatively proposes a PID-type sliding mode surface with an inverse hyperbolic integral terminal term, which can achieve a better tracking effect while ensuring finite time convergence. (2) The variable gain hyperbolic reaching law is proposed, in which the variable gain term can achieve the purpose of the variable speed approach according to the distance from the sliding mode surface and is a continuous function, the continuity of the sliding mode control can be guaranteed. The two work together to eliminate the high-frequency unmodeled dynamics of the system caused by the traditional reaching law relying on high-gain switching. (3) The adaptive estimation method can effectively estimate and compensate for the lumped disturbance when the upper bound of uncertainty and external disturbance is unknown and consumes less computational resources.
The rest of the paper is organized as follows: Section 2 states the problem. In Section 3, the proposed PID-type sliding mode surface and variable-gain hyperbolic reaching law are presented, and their stability is proved according to the Lyapunov theorem. In Section 4, we generalize the PIDSM method to N-DOF robots. Numerical simulation results are presented in Section 5. Finally, the work in this paper is summarized in Section 6.
2. Problem Statement
The following second-order nonlinear dynamic model shown below is considered in this paper:
where and are the state variables of the system, is the output signal of the system, and are nonlinear functions that are closely related to the control system itself, is the uncertainty of the system, is the external disturbances, and is the control input of the system.
Define the tracking error and where is the reference signal. Then, substitute into the nonlinear system (1) and take the derivative to obtain the following:
where , is the lumped disturbance of the system. In order to enable the controller to achieve accurate tracking in the presence of uncertainties and external disturbances in the controlled system, the following assumptions are made.
Assumption 1.
The reference signalmust be a twice continuously differentiable function with respect to.
Assumption 2.
The lumped disturbance has an upper bounded by a positive function at all times and one has:
where we assume that the lumped disturbance upper bound is a function containing only position and velocity measurements, the following conclusions can be drawn []:
where , and are unknown positive constants.
Remark 1.
According to the actual working conditions of the controlled system, the above assumptions are very reasonable because the maximum charge rate of external disturbance and system disturbance limits the value of the parameters.
Notation: is the symbolic function. For a variable vector is a real vector and define the fractional power of vectors as follows:
3. Adaptive Chattering-Free PIDSM Controller Design
The design of a sliding mode controller usually includes the following three main contents: (1) the design of the sliding surface; (2) the design of equivalent control law; (3) the design of switching control law.
3.1. PIDSM Controller Design
Firstly, to track a given desired signal of the controlled system (1), a novel PID-type sliding surface containing a hyperbolic function is designed as follows:
where and are positive constants, and is the arctangent function.
By observing (6), we find that if the initial condition of the integral term is chosen as , the sliding variable will start from the sliding surface . This characteristic of ISM can effectively eliminate the arrival phase of the controlled system and improve the response speed of the controller.
The time derivative of the sliding surface (6) has the following:
Substituting (2) into (7), one has the following:
Then design the equivalent control law . is a necessary condition for the state trajectory to remain on the sliding surface. So, we can obtain the equivalent control law by (8) as follows:
The equivalent control law can guarantee that the system maintains the motion state on the sliding surface without uncertainty and external disturbance. However, there are bound to be factors such as uncertainty and external disturbances in practical work. To meet the actual work situation, the following approach law is designed:
where , , , and is the system state.
We can obtain the switching control law by (10), one has the following:
Finally, the control law is designed as follows:
For the brevity of the paper, the notion of time for all given variables is omitted in the following. The main results of the designed adaptive chatter-free PID sliding mode control are summarized as Theorem 1.
Theorem 1.
Consider a nonlinear uncertain system (1) where the lumped disturbance satisfies constraint (4). If the APIDSM surface is set to (6) and the control law is designed to be (12), the system state converges to the sliding surface in a finite time.
Proof.
Choose the Lyapunov function as follows:
Differentiating with respect to time and substituting in (7), one has the following:
By substituting the error dynamics (2) and control law (12) into (14), one has the following:
It is easy to verify that
According to (13), we can obtain the following:
where and .
According to the Lyapunov stability theorem, the state of the system converges asymptotically to the sliding surface .
To prove that this convergence occurs in finite time, it can be obtained by a simple operation from (13) as follows:
One has the following:
Assuming that the arrival time of the initial error to is , integrating both sides of (19) can be obtained as follows:
After simple calculation, we can obtain the following:
Therefore, according to the Lyapunov stability criterion, the proposed PIDSM surface can converge to zero in finite time . At the same time, the output tracking error of the system can also converge to zero in finite time. Completes the proof. □
Remark 2.
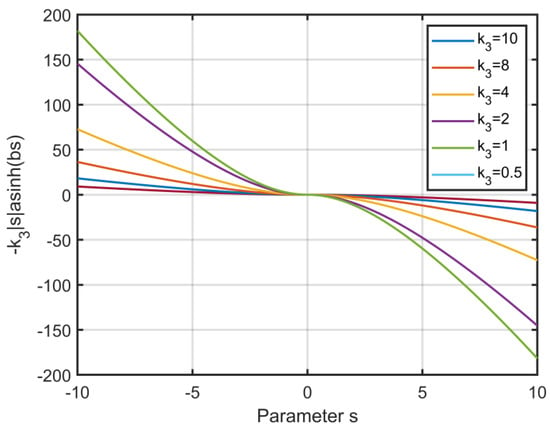
The sliding-mode reaching law (10) consists of a variable gain term and an inverse hyperbolic sine function, which can ensure the variable-speed reaching process and is chattering-free. The system stateis introduced into the variable gain term, which can achieve the purpose of the variable speed approaching the sliding mode surface. The inverse hyperbolic sine function replaces the traditional sign function, which ensures the continuity of the control law. The two work together to achieve a chatter-free effect. Figure 1 shows a simplified reaching lawto express the effect of variable gain.
Figure 1.
Plot of with .
3.2. Adaptive PIDSM (APIDSM) Controller Design
In this section, an adaptive estimation method is used to estimate the upper bound of the lumped disturbance. The designed APIDSM control block diagram is shown in Figure 2.
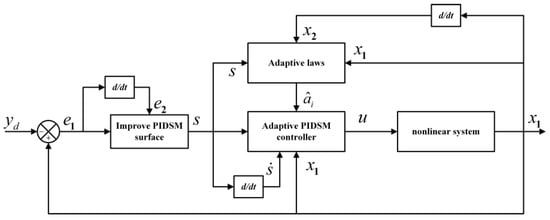
Figure 2.
Control diagram of the designed controller.
The switching control law (11) can be redesigned as follows:
where can update the estimate of by the following adaptive law:
and where , and are respectively as follows []:
Hence, the control law (12) is rewritten as follows:
Theorem 2.
Consider system (1), where the upper bound of lumped disturbance (4) is assumed to be completely unknown. Using the control law of (25) can ensure that the system state converges to the sliding surface.
Proof.
Choose the Lyapunov function as follows:
where is the adaption error, . The time derivative of and substituting in (2) and (7) to obtain the following:
Substitute in (25) and it is easy to verify the following:
We can obtain the following:
By the Lyapunov stability theorem, the state of the system converges asymptotically to the sliding surface . Completes the proof. □
Remark 3.
The upper bound value of the lumped disturbance is estimated according to the Lyapunov stability theorem, so no prior knowledge is required. Although we can determine the upper bound value according to work experience, due to the variability of the actual situation and different operating conditions, the upper bound value is time-varying, which reduces the robustness of the controlled system. The adaptive estimation method successfully eliminates the selection process of the upper bound of uncertainty, which ensures the control output’s high precision and the controller’s robustness.
Remark 4.
Since the parameter estimates (23) are adaptively tuned in the Lyapunov sense, they do not necessarily converge to the true value. However, according to the proof of (28), when the sliding mode variable, the adaptive value will remain unchanged to ensure the finite-time convergence of the tracking error and achieve the robustness of the controller.
Remark 5.
During the working process, due to the uncertainty and measurement noise in the system, the sliding variableappears to chatter near the equilibrium point, which will beoverestimated. To mitigate this problem, the dead zone technique is often employed, as shown below:
whereis a small positive constant. Obviously, whenis in range,, and will not continue to increase but keep their current values. The above method can ensure that as long as the control system reaches the true sliding mode, it can converge to the neighborhood of in a finite time, and the steady-state accuracy of is given. Additionally, we can easily show that finite-time convergence is guaranteed since the threshold (28) above is still satisfied.
Remark 6.
To better suppress chatter, we use saturation function to replacein (22). The saturation function is the following:
whereis a constant and select. value is determined by considering the tracking accuracy and smoothness of the control output.
3.3. Control Parameters Selection
In the actual work process, it is impossible to keep the performance of the controlled system in the best state at the same time. It is necessary to consider various influencing factors such as control input, command smoothness, and noise at the same time to obtain a compromise value. We give the following parameter selection guidelines for the proposed controller by trial and error:
- Selections of , and : The parameters , directly affect the dynamics of the sliding surface in (6). An appropriate increase in , and can effectively improve the tracking accuracy and response speed, but an excessively large value will cause it to develop in the opposite direction;
- Selections of and : The parameters directly influence the approach speed of sliding mode control, which has a positive correlation. The larger parameter δ can improve the smoothness of the control output and the approach speed of sliding mode control;
- Selections of : First, the parameter is used to speed up the approach speed when it is closer to the sliding surface, and a smaller value can speed up the approach speed. Second, the parameter is quite important for the adaptation control law (29) and the value of directly affects the tracking accuracy of the controller.
4. Robotic Manipulators
It is worth noting that the robot system can be represented in the form of (2), so the following generalization is made to the robot system as the research example object. To this end, the robot model is transformed in the form of (2) through appropriate coordinate transformations.
The n-joint rigid robot manipulators model is as follows:
where are the joint’s position, velocity, and acceleration, respectively. is the positive inertia matrix, denotes the centrifugal-Coriolis matrix, is the gravity term, is the external disturbances and with , is the input torque.
In practical engineering applications, it is impossible to obtain a completely accurate robot dynamics model. Therefore, the above dynamic quantities can be expressed as follows []:
where and denote the nominal parts, and denote the model uncertainties.
According to (32), the dynamic equation of the robotic manipulator is replaced as follows:
where is the lumped disturbance, which includes the uncertainty in (32), external disturbances and measurement noise.
Let the tracking error denoted by are defined as follows:
where is the reference trajectory.
Equation (34) is used for system (33), one has the following:
where . By Assumption 2, the lumped disturbance has an upper bounded, and one has the following:
where , and are unknown positive constants. and are bounded.
It is easy to verify that the error dynamic of (35) is the form of (2). Hence, the APIDSM controller proposed in Section 3 can be applied to n-DOF robotic manipulators. The proof is similar to Theorem 2, so it is omitted here.
5. Simulation Results
To verify the effectiveness of the proposed control algorithm, we use a two-link manipulator, as shown in Figure 3.
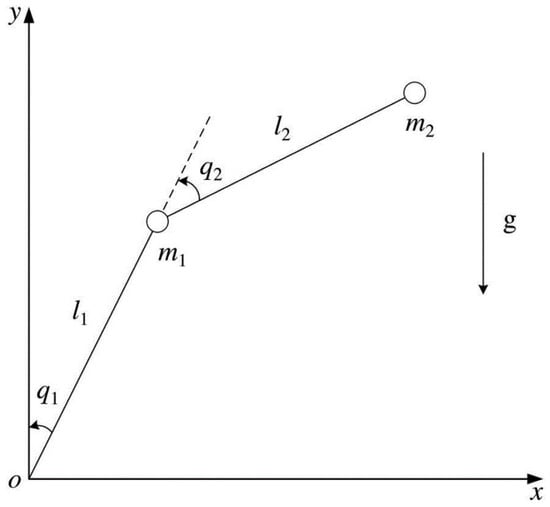
Figure 3.
The robotic manipulator system.
The dynamics of the two-link robotic manipulator in (33) is given by the following:
where
where is the position of the robot manipulator joints 1 and 2, respectively. is the input torque, and we ignore friction between joints. Due to the limited output torque in the actual situation, so set the upper limit of actuator output to . Table 1 shows the values of the physical parameters used in the simulation analysis of the robotic manipulator.

Table 1.
Physical parameters of the robotic manipulator used in the simulation.
The terms , and used in the proposed controller are given by the known and .The initial position and velocity are set as rad and rad/s. The expected signal is as follows:
To show the robustness of the proposed control scheme, a time-varying external disturbance is introduced into the system as follows:
and the effect of sudden load variation is introduced, assuming that the robot picks up a weight at 2 s, namely, the mass of link 2 is the increasing from to after .
5.1. Performance Evaluation of the APIDSMC
Considering the APIDSM controller described in Section 3, the control law of the two-link manipulator is as follows:
where is the equivalent control. is the switching control. and are, respectively, as follows:
where is a positive definite matrix, , and are the real-time estimated value of , and .
The proposed controller parameters are chosen as , , , , and . The initial values of the adaptive update law are , and . The effectiveness of the proposed controller is verified by simulation under the conditions of introducing external disturbances and payload changes.
Figure 4, Figure 5, Figure 6, Figure 7, Figure 8 and Figure 9 show the effect of the controlled system on tracking performance under time-varying external disturbances (42) and sudden load changes. It is clear from Figure 4, Figure 5 and Figure 6 that the control performance does not deteriorate when the upper bound of the external disturbance of the system is unknown and the load changes. The control torque shown in Figure 7 is smooth and chattering-free, indicating that the system can still guarantee excellent tracking performance under the influence of lumped disturbances, proving the effectiveness of the proposed controller. The adaptive estimates shown in Figure 8 all converge to a constant value, indicating that the estimates are adaptively adjusted until the sliding variable converges to zero (Figure 9).
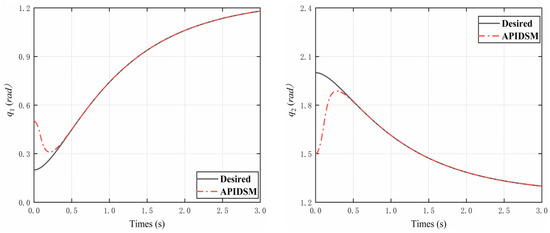
Figure 4.
Position tracking results of Joint 1 and Joint 2.
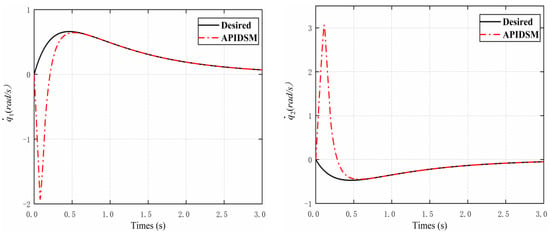
Figure 5.
Velocity tracking results of Joint 1 and Joint 2.
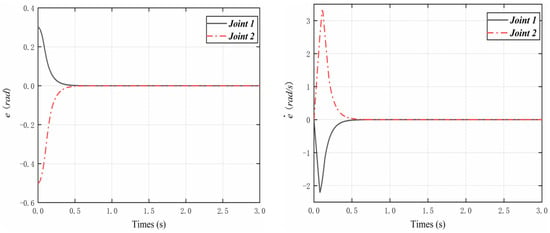
Figure 6.
Position tracking error and velocity tracking error of Joint 1 and Joint 2.
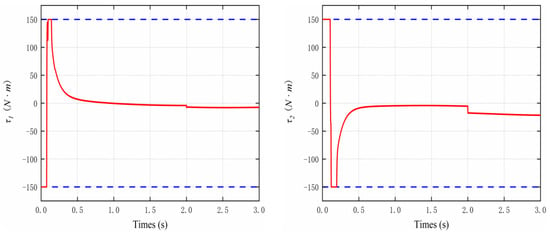
Figure 7.
Position tracking error and velocity tracking error of Joint 1 and Joint 2.
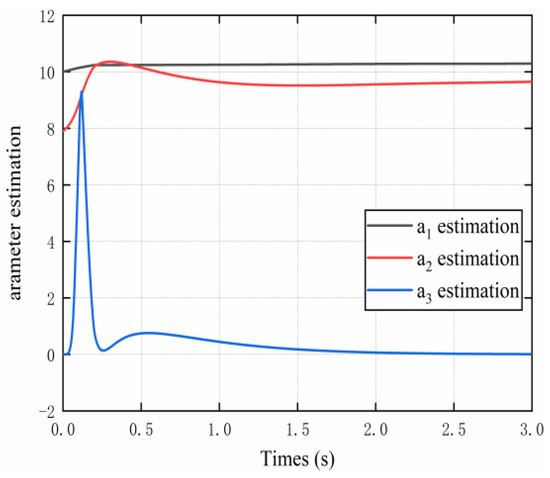
Figure 8.
Parameter estimation.
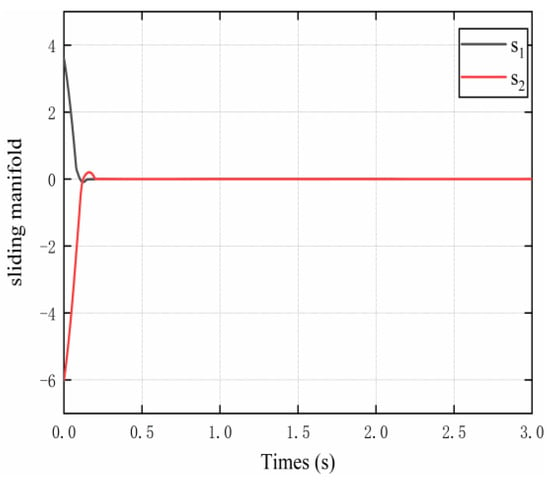
Figure 9.
Sliding manifold.
5.2. Comparative Study
To better verify the effectiveness of APIDSMC, we compare the two methods of ITSM [] and adaptive nonsingular fast terminal sliding mode control (ANFTSM) []. To obtain convincing results, all simulations are performed under the same simulation conditions as the proposed control algorithm.
The sliding surface and the control law of ITSM are the following:
where
and where , , , are constant positive-definite diagonal matrices and are positive constants.
The sliding surface , the control law and the adaptive law of ANFTSM are the following:
where
where , and , , , are positive constants.
Table 2 shows the controller parameters selected for ITSM and ANFTSM. The tracking performance comparison effect is shown in Figure 10, Figure 11, Figure 12 and Figure 13. It is observed from Figure 10, Figure 11 and Figure 12 that the proposed controller has a faster convergence speed in position and velocity tracking. In addition, it can be seen from Figure 13 that the proposed controller has no chatter with the ITSM controller, but the ANFTSM has larger chatter.
Table 2.
Controller parameters of ITSM and ANFTSM.
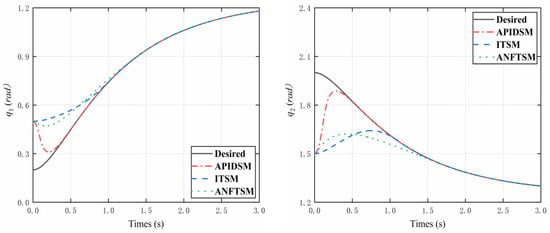
Figure 10.
Comparison of position tracking results between controllers of Joint 1 and Joint 2.
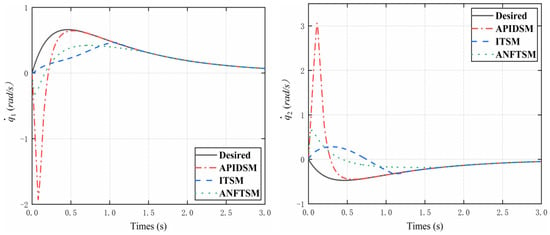
Figure 11.
Comparison of velocity tracking results between controllers of Joint 1 and Joint 2.
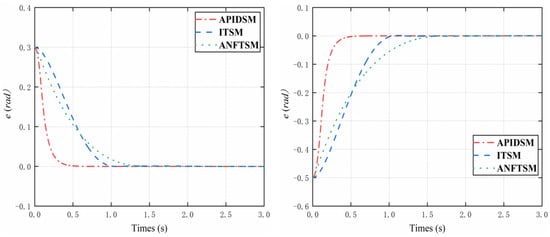
Figure 12.
Comparison of position tracking error results between controllers of Joint 1 and Joint 2.
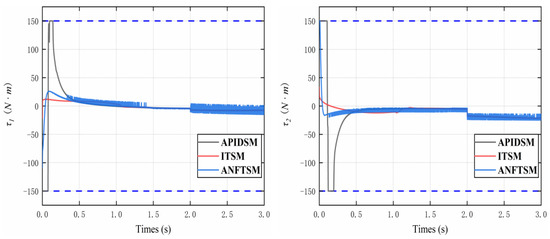
Figure 13.
Comparison of input torque results between controllers of Joint 1 and Joint 2.
To obtain the compared results more clearly, the integration of the absolute value of the error (IAE) and the integral of the time multiplied by the absolute value of the error (ITAE) were introduced for quantitative analysis []. Table 3 shows the comparison results between the performance indicators IAE and ITAE. These are defined as follows:
where is the total running time.
Table 3.
Comparison of performance indicators.
It can be seen from Table 3 that the proposed control method has lower IAE and ITAE values compared with the comparison method. Therefore, the simulation results can prove that the proposed control method can ensure faster-tracking speed, faster convergence speed, strong robustness, lower chattering, and adaptive ability. The effectiveness of the proposed APIDSM controller is verified.
6. Conclusions
In this paper, a sliding mode controller composed of a PID-type sliding mode surface with an arctangent hyperbolic function and a variable gain hyperbolic reaching law is proposed for trajectory tracking under uncertainty. Especially in the case of external time-varying interference and variable load, it can still maintain a good tracking effect. Therefore, the proposed controller still maintains continuity, smoothness, and chatter-free output without knowing the upper bound of the lumped disturbance. To verify the effectiveness of the proposed controller, a two-link robot is simulated under the condition of external time-varying disturbance and load variation, and the effectiveness of the proposed control method is verified by comparing it with other control methods.
Author Contributions
Conceptualization, Y.L. and T.W.; methodology, G.L.; software, D.Z.; validation, Y.L., G.L. and T.W; formal analysis, D.Z.; investigation, D.Z.; resources, G.L.; data curation, G.L.; writing—original draft preparation, Y.L.; writing—review and editing, Y.L.; visualization, D.Z.; supervision, T.W.; project administration, T.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by The Central Government Guided Local Special Foundation, grant number YDZX20191400002765; The National Natural Science Foundation of China, grant number 52075503 and 51875532.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Acknowledgments
We acknowledge academic editor for his careful revision of the language and grammatical structures in this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, Y.; Xie, L.; de Souza, C.E. Robust control of a class of uncertain nonlinear systems. Syst. Control Lett. 1992, 19, 139–149. [Google Scholar] [CrossRef]
- Rincon, L.; Coronado, E.; Hendra, H.; Phan, J.; Zainalkefli, Z.; Venture, G. Expressive states with a robot arm using adaptive fuzzy and robust predictive controllers. In Proceedings of the 2018 3rd International Conference on Control and Robotics Engineering (ICCRE), Nagoya, Japan, 20 April 2018; pp. 11–15. [Google Scholar]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Nguyen, N.D.K.; Chu, B.L.; Nguyen, T.T. Optimal control for the stable walking gait of a biped robot. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, 28 June–1 July 2017; pp. 309–313. [Google Scholar]
- Wang, J.; Xin, M. Distributed optimal cooperative tracking control of multiple autonomous robots. Robot. Auton. Syst. 2012, 60, 572–583. [Google Scholar] [CrossRef]
- Verscheure, D.; Demeulenaere, B.; Swevers, J.; De Schutter, J.; Diehl, M. Time-energy optimal path tracking for robots: A numerically efficient op-timization approach. In Proceedings of the 2008 10th IEEE International Workshop on Advanced Motion Control, Trento, Italy, 26–28 March 2008; pp. 727–732. [Google Scholar]
- Lu, E.; Ma, Z.; Li, Y.; Xu, L.; Tang, Z. Adaptive backstepping control of tracked robot running trajectory based on realtime slip parameter estimation. Int. J. Agric. Biol. Eng. 2020, 13, 178–187. [Google Scholar] [CrossRef]
- Jiang, Z.H.; Shinohara, K. Workspace trajectory tracking control of flexible joint robots based on backstepping method. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 3473–3476. [Google Scholar]
- Liu, Y.; Jing, H.; Liu, X.; Lv, Y. An improved hybrid error control path tracking intelligent algorithm for omnidirectional AGV on ROS. Int. J. Comput. Appl. Technol. 2020, 64, 115–125. [Google Scholar] [CrossRef]
- Li, Z.F.; Li, J.T.; Li, X.F.; Yang, Y.J.; Xiao, J.; Xu, B.W. Intelligent tracking obstacle avoidance wheel robot based on arduino. Procedia Comput. Sci. 2020, 166, 274–278. [Google Scholar] [CrossRef]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Wang, J. Path Tracking of Wheeled Mobile Robots Based on Dynamic Prediction Model. IEEE Access 2019, 7, 39690–39701. [Google Scholar] [CrossRef]
- Dai, L.; Yu, Y.; Zhai, D.-H.; Huang, T.; Xia, Y. Robust Model Predictive Tracking Control for Robot Manipulators with Disturbances. IEEE Trans. Ind. Electron. 2020, 68, 4288–4297. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C. A new nonsingular integral terminal sliding mode control for robot manipulators. Int. J. Syst. Sci. 2020, 51, 1418–1428. [Google Scholar] [CrossRef]
- Tayebi-Haghighi, S.; Piltan, F.; Kim, J.M. Robust composite high-order super-twisting sliding mode control of robot manipula-tors. Robotics 2018, 7, 13. [Google Scholar] [CrossRef]
- Su, C.-Y.; Stepanenko, Y. Adaptive sliding mode control of robot manipulators: General sliding manifold case. Automatica 1994, 30, 1497–1500. [Google Scholar] [CrossRef]
- Cheng, C.C.; Hsu, S.C. Design of adaptive sliding mode controllers for a class of perturbed fractional-order nonlinear systems. Nonlinear Dyn. 2019, 98, 1355–1363. [Google Scholar] [CrossRef]
- Shi, K.; Yin, X.; Jiang, L.; Liu, Y.; Hu, Y.; Wen, H. Perturbation Estimation Based Nonlinear Adaptive Power Decoupling Control for DFIG Wind Turbine. IEEE Trans. Power Electron. 2019, 35, 319–333. [Google Scholar] [CrossRef]
- Kwon, S.J.; Chung, W.K. Combined synthesis of state estimator and perturbation observer. J. Dyn. Syst. Meas. Control 2003, 125, 19–26. [Google Scholar] [CrossRef]
- Song, Q.; Spall, J.C.; Soh, Y.C.; Ni, J. Robust neural network tracking controller using simultaneous perturbation stochastic ap-proximation. IEEE Trans. Neural Netw. 2008, 19, 817–835. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z.; Jin, X.; Huang, Y.; Kong, H.; Yu, M.; Ping, Z.; Sun, Z. Adaptive Integral Terminal Sliding Mode Control for Automobile Electronic Throttle via an Uncertainty Observer and Experimental Validation. IEEE Trans. Veh. Technol. 2018, 67, 8129–8143. [Google Scholar] [CrossRef]
- Hao, S.; Hu, L.; Liu, P.X. Second-order adaptive integral terminal sliding mode approach to tracking control of robotic manip-ulators. IET Control Theory Appl. 2021, 15, 2145–2157. [Google Scholar] [CrossRef]
- Shao, K. Nested adaptive integral terminal sliding mode control for high-order uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2021, 31, 6668–6680. [Google Scholar] [CrossRef]
- Zhai, J.; Xu, G. A Novel Non-Singular Terminal Sliding Mode Trajectory Tracking Control for Robotic Manipulators. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 391–395. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X.; Gao, H.; Yu, X. Practical Terminal Sliding Mode Control and its Applications in Servo Systems. IEEE Trans. Ind. Electron. 2022, 70, 752–761. [Google Scholar] [CrossRef]
- Wang, A.; Jia, X.; Dong, S. A New Exponential Reaching Law of Sliding Mode Control to Improve Performance of Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2013, 49, 2409–2412. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J. A new reaching law for anti-disturbance sliding-mode control of PMSM speed regulation system. IEEE Trans. Power Electron. 2019, 35, 4117–4126. [Google Scholar] [CrossRef]
- Xu, L.; Shao, X.; Zhang, W. USDE-based continuous sliding mode control for quadrotor attitude regulation: Method and ap-plication. IEEE Access 2021, 9, 64153–64164. [Google Scholar] [CrossRef]
- Tao, L.; Chen, Q.; Nan, Y.; Wu, C. Double Hyperbolic Reaching Law with Chattering-Free and Fast Convergence. IEEE Access 2018, 6, 27717–27725. [Google Scholar] [CrossRef]
- Asad, M.; Bhatti, A.; Iqbal, S.; Asfia, Y. A smooth integral sliding mode controller and disturbance estimator design. Int. J. Control Autom. Syst. 2015, 13, 1326–1336. [Google Scholar] [CrossRef]
- Zhihong, M.; Yu, X. Adaptive terminal sliding mode tracking control for rigid robotic manipulators with uncertain dynamics. JSME Int. J. Ser. C 1997, 40, 493–502. [Google Scholar] [CrossRef]
- Yi, S.; Zhai, J. Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators. ISA Trans. 2019, 90, 41–51. [Google Scholar] [CrossRef]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef]
- Li, T.H.S.; Huang, Y.C. MIMO adaptive fuzzy terminal sliding-mode controller for robotic manipulators. Inf. Sci. 2010, 180, 4641–4660. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).