
A Maritime Traffic Network Mining Method Based on Massive Trajectory Data

Abstract
:1. Introduction
2. Related Work
3. System Model and Definition
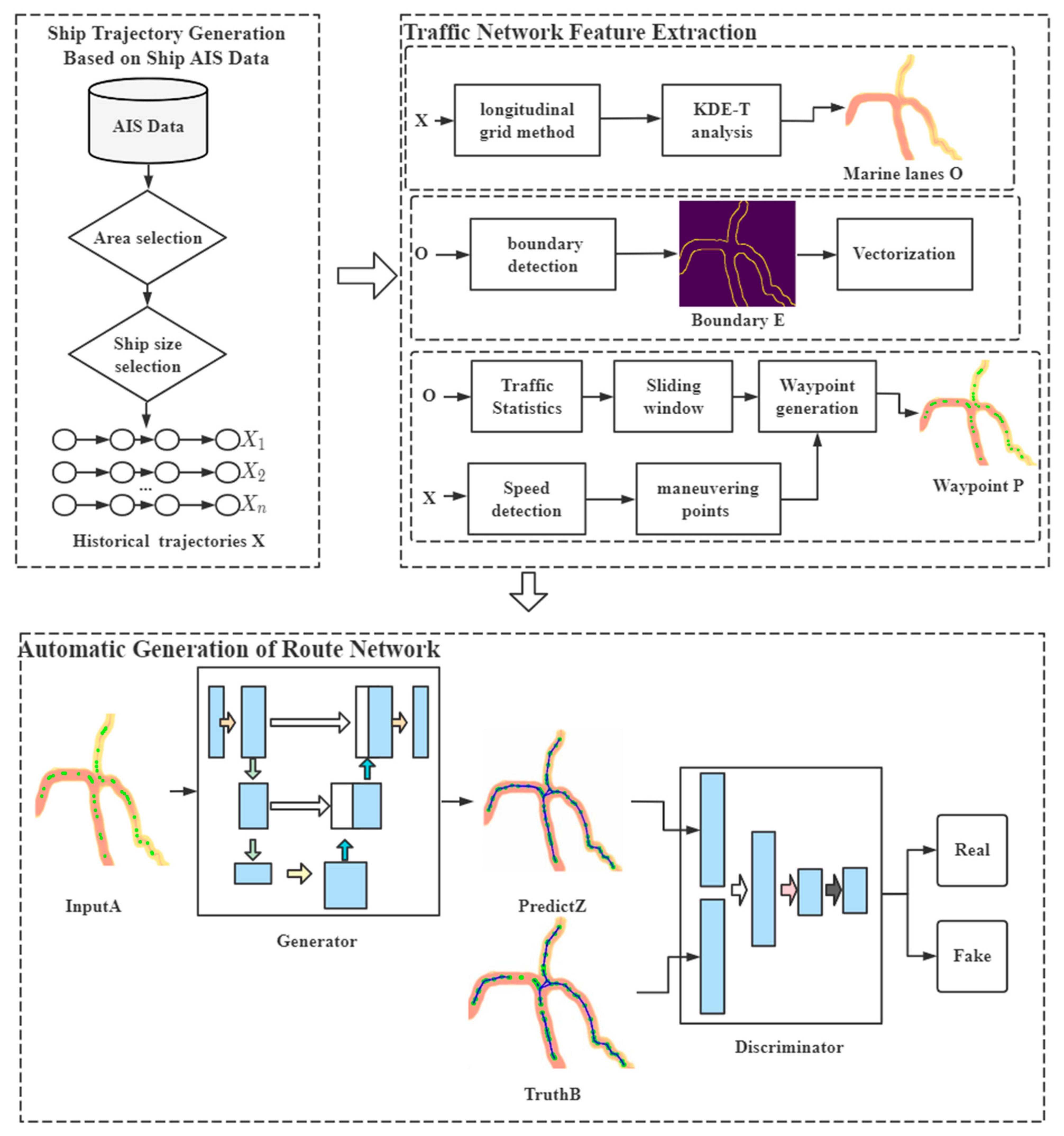
4. Our Proposed Maritime Traffic Network Extraction Scheme
4.1. Ship Trajectory Generation Based on Ship AIS Data
- (1)
- Due to data anomalies during data collection, transmission, and processing [27], it is necessary to delete wrong coordinates, decode abnormal data, and remove the redundancy of trajectory points. Among them, ship position errors refer to the deletion of the latitude and longitude of the track points beyond the normal range. Decoding abnormal data means that the ship position frequently jumps, necessitating the deletion of the entire trajectory segment. The Douglas–Peucker compression algorithm [7] is applicable to extract the feature point set to represent the trajectory segment.
- (2)
- The phenomenon of data drift refers to the large difference between the information of individual sample points and the information of the sample point. The generated trajectory may pass through the avoidance area, which will affect the accuracy and precision of the extraction results. The vessel has the characteristics of large mass and inertia, and the behavior state will not change abruptly. Therefore, thresholds can be set for the ship, position, ship speed, and heading of the adjacent points in the trajectory segment to judge whether there is data drift at any time. For the heading , for example, the calculated sample mean , and the standard deviation of , when the error between the sample and the sample mean > 3, it indicates that the sample has abnormal data, and the abnormal data need to be eliminated. The above steps are repeated for behavioral parameters such as position, ship speed, and heading to eliminate the influence of data drift.
- (3)
- Based on the AIS data, a subset of data is selected for a given vessel type and waters. According to the time series, the trajectory data of a single ship are generated.
4.2. Traffic Network Feature Extraction
4.2.1. Method for Extraction of Marine Lanes
4.2.2. Route Boundary Construction Method
4.2.3. Waypoint Extraction Method
4.3. Automatic Generation of Traffic Network
4.3.1. Generator
4.3.2. Discriminator
4.3.3. Loss Function
5. Performance Analysis
5.1. Experimental Data
5.2. Comparing Models
5.3. Experimental Results
5.4. Engineering Applications
6. Conclusion and the Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.-B. Exploiting AIS data for intelligent maritime navigation: A comprehensive survey from data to methodology. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1559–1582. [Google Scholar] [CrossRef]
- Shen, H.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic collision avoidance of multiple ships based on deep Q-learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Xiao, Z.; Fu, X.; Zhang, L.; Goh, R.S.M. Traffic pattern mining and forecasting technologies in maritime traffic service networks: A comprehensive survey. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1796–1825. [Google Scholar] [CrossRef]
- Guo, W.; Xiong, N.; Vasilakos, A.V.; Chen, G.; Cheng, H. Multi-source temporal data aggregation in wireless sensor networks. Wirel. Pers. Commun. 2011, 56, 359–370. [Google Scholar] [CrossRef]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected vehicle as a mobile sensor for real time queue length at signalized intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Meng, J.; Li, Z.; Hesenius, M.; Ding, W.; Han, Y.; Gruhn, V. Adaptive extraction and refinement of marine lanes from crowdsourced trajectory data. Mob. Netw. Appl. 2020, 25, 1392–1404. [Google Scholar] [CrossRef]
- Lu, N.; Liang, M.; Zheng, R.; Liu, R.W. Historical AIS Data-Driven Unsupervised Automatic Extraction of Directional Maritime Traffic Networks. In Proceedings of the 2020 IEEE 5th International Conference on Cloud Computing and Big Data Analytics (ICCCBDA), Chengdu, China, 10–13 April 2020; pp. 7–12. [Google Scholar] [CrossRef]
- Tang, L.; Ren, C.; Liu, Z.; Li, Q. A road map refinement method using Delaunay triangulation for big trace data. ISPRS Int. J. Geo-Inf. 2017, 6, 45. [Google Scholar] [CrossRef] [Green Version]
- Wan, R.; Xiong, N. An energy-efficient sleep scheduling mechanism with similarity measure for wireless sensor networks. Hum.-Cent. Comput. Inf. Sci. 2018, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y. Mean shift, mode seeking, and clustering. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 790–799. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Liu, J.; Wu, K.; Yang, Z.; Liu, R.W.; Xiong, N. Spatio-temporal vessel trajectory clustering based on data mapping and density. IEEE Access 2018, 6, 58939–58954. [Google Scholar] [CrossRef]
- Sheng, P.; Yin, J. Extracting shipping route patterns by trajectory clustering model based on automatic identification system data. Sustainability 2018, 10, 2327. [Google Scholar] [CrossRef] [Green Version]
- Fernandez Arguedas, V.; Pallotta, G.; Vespe, M. Maritime traffic networks: From historical positioning data to unsupervised maritime traffic monitoring. IEEE Trans. Intell. Transp. Syst. 2017, 19, 722–732. [Google Scholar] [CrossRef]
- Edelkamp, S.; Schrödl, S. Route planning and map inference with global positioning traces. In Computer Science in Perspective; Springer: Berlin/Heidelberg, Germany, 2003; pp. 128–151. [Google Scholar] [CrossRef]
- Jin, X.; Yang, Y.; Qiu, X. Framework of frequently trajectory extraction from AIS data. In Proceedings of the 2017 the 7th International Conference on Computer Engineering and Networks, Shanghai, China, 22−23 July 2017; pp. 22–23. [Google Scholar]
- Yitao, W.; Lei, Y.; Xin, S. Route mining from satellite-AIS data using density-based clustering algorithm. J. Phys. Conf. Ser. IOP Publ. 2020, 1616, 012017. [Google Scholar] [CrossRef]
- He, R.; Xiong, N.; Yang, L.T.; Park, J.H. Using multi-modal semantic association rules to fuse keywords and visual features automatically for web image retrieval. Inf. Fusion 2011, 12, 223–230. [Google Scholar] [CrossRef]
- Yan, Z.; Xiao, Y.; Cheng, L.; He, R.; Ruan, X.; Zhou, X.; Li, M.; Bin, R. Exploring AIS data for intelligent maritime routes extraction. Appl. Ocean Res. 2020, 101, 102271. [Google Scholar] [CrossRef]
- Filipiak, D.; Węcel, K.; Stróżyna, M.; Michalak, M.; Abramowicz, W. Extracting maritime traffic networks from AIS data using evolutionary algorithm. Bus. Inf. Syst. Eng. 2020, 62, 435–450. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhou, C.; Tian, Y.-C.; Xiong, N.; Qin, Y.; Hu, B. A fuzzy probability Bayesian network approach for dynamic cybersecurity risk assessment in industrial control systems. IEEE Trans. Ind. Inform. 2017, 14, 2497–2506. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Son, W.J.; Lee, H.T.; Cho, I.S. Verification of novel maritime route extraction using kernel density estimation analysis with automatic identification system data. J. Mar. Sci. Eng. 2020, 8, 375. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Li, Y. Efficient map reconstruction and augmentation via topological methods. In Proceedings of the 23rd SIGSPATIAL international conference on advances in geographic information systems, Seattle, WA, USA, 3–6 November 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P. Unsupervised extraction of maritime patterns of life from Automatic Identification System data. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Xia, F.; Hao, R.; Li, J.; Xiong, N.; Yang, L.T.; Zhang, Y. Adaptive GTS allocation in IEEE 802.15.4 for real-time wireless sensor networks. J. Syst. Archit. 2013, 59, 1231–1242. [Google Scholar] [CrossRef]
- Wan, Z.; Xiong, N.; Ghani, N.; Vasilakos, A.V.; Zhou, L. Adaptive unequal protection for wireless video transmission over IEEE 802.11e networks. Multimed. Tools Appl. 2014, 72, 541–571. [Google Scholar] [CrossRef]
- Huang, S.; Liu, A.; Wang, T.; Xiong, N.N. BD-VTE: A novel baseline data based verifiable trust evaluation scheme for smart network systems. IEEE Trans. Netw. Sci. Eng. 2020, 8, 2087–2105. [Google Scholar] [CrossRef]
- Wu, M.; Tan, L.; Xiong, N. A structure fidelity approach for big data collection in wireless sensor networks. Sensors 2015, 15, 248–273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, Z.; Yan, J. Kernel density estimation of traffic accidents in a network space. Comput. Environ. Urban Syst. 2008, 32, 396–406. [Google Scholar] [CrossRef] [Green Version]
- Rong, H.; Teixeira, A.P.; Soares, C.G. Data mining approach to shipping route characterization and anomaly detection based on AIS data. Ocean. Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Lu, Y.; Wu, S.; Fang, Z.; Xiong, N.; Yoon, S.; Park, D.S. Exploring finger vein based personal authentication for secure IoT. Future Gener. Comput. Syst. 2017, 77, 149–160. [Google Scholar] [CrossRef]
- Bribiesca, E. A new chain code. Pattern Recognit. 1999, 32, 235–251. [Google Scholar] [CrossRef]
- Dobrkovic, A.; Iacob, M.E.; van Hillegersberg, J. Maritime pattern extraction and route reconstruction from incomplete AIS data. Int. J. Data Sci. Anal. 2018, 5, 111–136. [Google Scholar] [CrossRef] [Green Version]
- Wen, Y.; Sui, Z.; Zhou, C.; Xiao, C.; Chen, Q.; Han, D.; Zhang, Y. Automatic ship route design between two ports: A data-driven method. Appl. Ocean. Res. 2020, 96, 102049. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, K.; Ji, S. Simultaneous road surface and centerline extraction from large-scale remote sensing images using CNN-based segmentation and tracing. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8919–8931. [Google Scholar] [CrossRef]
- Belli, D.; Kipf, T. Image-conditioned graph generation for road network extraction. arXiv 2019, arXiv:1910.14388. [Google Scholar]
- Yu, Y.; Wang, J.; Guan, H. CS-CapsFPN: A Context-Augmentation and Self-Attention Capsule Feature Pyramid Network for Road Network Extraction from Remote Sensing Imagery. Can. J. Remote Sens. 2021, 47, 499–517. [Google Scholar] [CrossRef]
- Abdollahi, A.; Pradhan, B.; Alamri, A. VNet: An end-to-end fully convolutional neural network for road extraction from high-resolution remote sensing data. IEEE Access 2020, 8, 179424–179436. [Google Scholar] [CrossRef]
- Isola, P.; Zhu, J.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Pan, W.; Torres-Verdín, C.; Pyrcz, M.J. Stochastic Pix2pix: A new machine learning method for geophysical and well conditioning of rule-based channel reservoir models. Nat. Resour. Res. 2021, 30, 1319–1345. [Google Scholar] [CrossRef]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Hu, A.; Chen, S.; Wu, L.; Xie, Z.; Qiu, Q.; Xu, Y. WSGAN: An Improved Generative Adversarial Network for Remote Sensing Image Road Network Extraction by Weakly Supervised Processing. Remote Sens. 2021, 13, 2506. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Zang, Y.; Wang, C.; Cao, L.; Yu, Y.; Li, J. Road network extraction via aperiodic directional structure measurement. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3322–3335. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Hunter, G.J. A simple positional accuracy measure for linear features. Int. J. Geogr. Inf. Sci. 1997, 11, 299–306. [Google Scholar] [CrossRef]
- Yin, J.; Lo, W.; Deng, S.; Li, Y.; Wu, Z.; Xiong, N. Colbar: A collaborative location-based regularization framework for QoS prediction. Inf. Sci. 2014, 265, 68–84. [Google Scholar] [CrossRef]
- Qu, Y.; Xiong, N. RFH: A resilient, fault-tolerant and high-efficient replication algorithm for distributed cloud storage. In Proceedings of the 2012 41st International Conference on Parallel Processing, Pittsburgh, PA, USA, 10–13 September 2012; pp. 520–529. [Google Scholar] [CrossRef]
- Wang, Z.; Li, T.; Xiong, N.; Pan, Y. A novel dynamic network data replication scheme based on historical access record and proactive deletion. J. Supercomput. 2012, 62, 227–250. [Google Scholar] [CrossRef]
- Wu, L.; Xu, Y.; Wang, Q.; Wang, F.; Xu, Z. Mapping global shipping density from AIS data. J. Navig. 2017, 70, 67–81. [Google Scholar] [CrossRef]
- Yang, P.; Xiong, N.; Ren, J. Data security and privacy protection for cloud storage: A survey. IEEE Access 2020, 8, 131723–131740. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MMSI | Length (m) | Width (m) | Draught (m) | Longitude (°) | Latitude (°) | Speed (kn) | Course (°) | Time |
|---|---|---|---|---|---|---|---|---|
| 413xxx062 | 67 | 21 | 7 | 112.86136 | 23.2863 | 5.5 | 192.5 | 01:43:24 |
| 413xxx062 | 67 | 21 | 7 | 112.86002 | 23.2826 | 5.5 | 203.1 | 01:45:52 |
| 413xxx062 | 67 | 21 | 7 | 112.85786 | 23.2792 | 5.5 | 221.0.1 | 01:48:25 |
| Percentage | 0–10 | 10–20 | 20–30 | 30–40 | 40–50 | 50–60 | 60–70 | 70–80 | 80–90 | >90 |
|---|---|---|---|---|---|---|---|---|---|---|
| Color |
| Methods | RF (%) | P (70 m) | R (70 m) | P (100 m) | R (100 m) | P (130 m) | R (130 m) | |
|---|---|---|---|---|---|---|---|---|
| Method 1 | 90.22 | 12.16 | 71.66 | 72.11 | 77.01 | 77.35 | 84.13 | 84.37 |
| Method 2 | 70.42 | 21.17 | 49.81 | 47.39 | 54.59 | 56.40 | 60.08 | 63.43 |
| Our method | 88.15 | 2.53 | 83.12 | 83.17 | 91.51 | 91.53 | 95.53 | 95.57 |
| Methods | RF (%) | P (70 m) | R (70 m) | P (100 m) | R (100 m) | P (130 m) | R (130 m) | |
|---|---|---|---|---|---|---|---|---|
| Method 1 | 92.15 | 13. 92 | 68.4 | 67.64 | 73.73 | 74.78 | 82.73 | 84.78 |
| Method 2 | 85.57 | 23.25 | 65.6 | 65.32 | 71.54 | 71.33 | 78.54 | 78.81 |
| Our method | 89.06 | 5.83 | 80.45 | 81.55 | 86.52 | 86.58 | 93.52 | 93.58 |
| Methods | (s) | (s) |
|---|---|---|
| Method 1 | 10.90 | 6.78 |
| Method 2 | 11.56 | 8.73 |
| Our method | 10.13 | 6.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rong, Y.; Zhuang, Z.; He, Z.; Wang, X. A Maritime Traffic Network Mining Method Based on Massive Trajectory Data. Electronics 2022, 11, 987. https://doi.org/10.3390/electronics11070987
Rong Y, Zhuang Z, He Z, Wang X. A Maritime Traffic Network Mining Method Based on Massive Trajectory Data. Electronics. 2022; 11(7):987. https://doi.org/10.3390/electronics11070987
Chicago/Turabian StyleRong, Yu, Zhong Zhuang, Zhengwei He, and Xuming Wang. 2022. "A Maritime Traffic Network Mining Method Based on Massive Trajectory Data" Electronics 11, no. 7: 987. https://doi.org/10.3390/electronics11070987