
Review for Examining the Oxidation Process of the Moon Using Generative Adversarial Networks: Focusing on Landscape of Moon




Abstract
:1. Introduction
2. Related Studies
2.1. Conducting Aerospace Mission Using a Probe
2.2. Case That Applies Machine Learning Technology to the Moon
2.3. Basic Idea of GAN
- : The input ground-truth image results in a high probability value as the log value increases, and the input fake image results in a low probability value as the log value decreases. That is, is updated to distinguish between the ground-truth image and the fake image generated by .
- : A fake image is with noise is generated following a specific distribution (e.g., Gaussian distribution). When the generated fake image is put in , it is trained so that the probability is high, in a similar manner to the ground-truth image. In other words, when the value is increased, and the overall probability value is lowered, in short, is updated to generate an image that cannot clearly distinguish.
2.4. Variants of GANs
2.4.1. Architecture
2.4.2. Stability
2.4.3. Image-to-Image Translation
2.5. Cases Related to Aerospace Missions Using GAN
3. Research Methodology
4. Trends in Other AI Research
4.1. Trends of AI Technology Used in Space
4.2. The Direction of Research Related to the Moon
4.3. AI Applied to Remote Sensing Images
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| GAN | Generative Adversarial Networks |
| KARI | Korea Aerospace Research Institute |
| KPLO | Korea Pathfinder Lunar Orbiter |
| M3 | Moon Mineralogy Mapper |
| NASA | National Aeronautics and Space Administration |
| JPL | Jet Propulsion Laboratory |
| JAEA | Japan Aerospace Exploration Agency |
| SELENE | SELenological and ENgineering Explorer |
| LUTI | Lunar Terrain Imager |
| PolCam | Wide-Angle Polarimetric Camera |
| KMAG | KPLO Magnetometer |
| KGRS | KPLO Gamma-Ray Spectrometer |
| DTN | Delay/Disruption Tolerant Network |
| CNN | Convolutional Neural Networks |
| CDA | Crater Detection Algorithm |
| DNN | Deep Neural Networks |
| CGAN | Conditional GAN |
| EBGAN | Energy-Based GAN |
| DCGAN | Deep Convolution GAN |
| PGGAN | Progressive Growing of GANs |
| LR | Low-Resolution |
| DeLiGAN | GAN for Diverse and Limited Data |
| StyleGAN | Style-based GAN |
| CIPS | Conditionally-Independent Pixel Synthesis |
| MLP | Multi-Layer Perceptron |
| PixelDA | Pixel-Level Domain Adaptation |
| EM | Earth Mover |
| WGAN | Wasserstein GAN |
| LSGAN | Least Squares GAN |
| TTUR | Two Time-scale Update Rule |
| FID | Frechet Inception Distance |
| DiscoGAN | Discovers Cross-Domain Relations with GANs |
| HMI | Helioseismic and Magnetic Imager |
| SDO | Solar Dynamics Observatory |
| AIA | Atmospheric Imaging Assembly |
| EUVI | Extreme Ultraviolet Imager |
| HR | High-Resolution |
| EEGAN | GAN-based Edge-Enhancement Network |
| UDSN | Ultra-Dense SubNetwork |
| EESN | Edge-Enhancement SubNetwokr |
| EESRGAN | Edge-Enhanced Super-Resolution |
| ESRGAN | Enhanced Super-Resolution GAN |
| EEN | Edge-Enhancement Network |
| SCAE | Stacked Convolutional Auto Encoder |
| SR | Super-Resolution |
| TGAN | Transferred GAN |
| SRCNN | Super-Resolution Convolution Neural Network |
| SRGAN | Super-Resolution Generative Adversarial Network |
| ModFC | Modulated Fully-Connected |
| LeakyReLU | Leaky Rectified Linear Unit |
| ReLU | Rectified Linear Unit |
| PSR | Permanently Shadowed Regions |
References
- The Moon Is Rusting, and Researchers Want to Know Why. Available online: https://www.nasa.gov/feature/jpl/the-moon-is-rusting-and-researchers-want-to-know-why (accessed on 17 October 2021).
- Li, S.; Lucey, P.G.; Fraeman, A.A.; Poppe, A.R.; Sun, V.Z.; Hurley, D.M.; Schultz, P.H. Widespread hematite at high latitudes of the Moon. Sci. Adv. 2020, 6, eaba1940. [Google Scholar] [CrossRef] [PubMed]
- SOLAR SYSTEM EXPLORATION. Available online: https://solarsystem.nasa.gov/moons/earths-moon/in-depth/#surface (accessed on 17 October 2021).
- What’s the Difference between a Meteor, Meteoroid, and Meteorite? Available online: https://solarsystem.nasa.gov/asteroids-comets-and-meteors/meteors-and-meteorites/overview/?page=0&per_page=40&order=id+asc&search=&condition_1=meteor_shower%3Abody_type (accessed on 17 October 2021).
- Terada, K.; Yokota, S.; Saito, Y.; Kitamura, N.; Asamura, K.; Nishino, M.N. Biogenic oxygen from Earth transported to the Moon by a wind of magnetospheric ions. Nat. Astron. 2017, 1, 1–5. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 2672–2680. [Google Scholar]
- Park, S.W.; Kim, D.Y. Performance Comparison of Convolution Neural Network by Weight Initialization and Parameter Update Method. J. Korea Multimed. Soc. 2018, 21, 441–449. [Google Scholar]
- Park, S.W.; Kim, D.Y. Comparison of Image Classification Performance by Activation Functions in Convolutional Neural Networks. J. Korea Multimed. Soc. 2018, 21, 1142–1149. [Google Scholar]
- Park, S.W.; Kim, J.C.; Kim, D.Y. A Study on Classification Performance Analysis of Convolutional Neural Network using Ensemble Learning Algorithm. J. Korea Multimed. Soc. 2019, 22, 665–675. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-scale Machine Learning on Heterogeneous Systems. arXiv 2015, arXiv:1603.04467, 1–19. [Google Scholar]
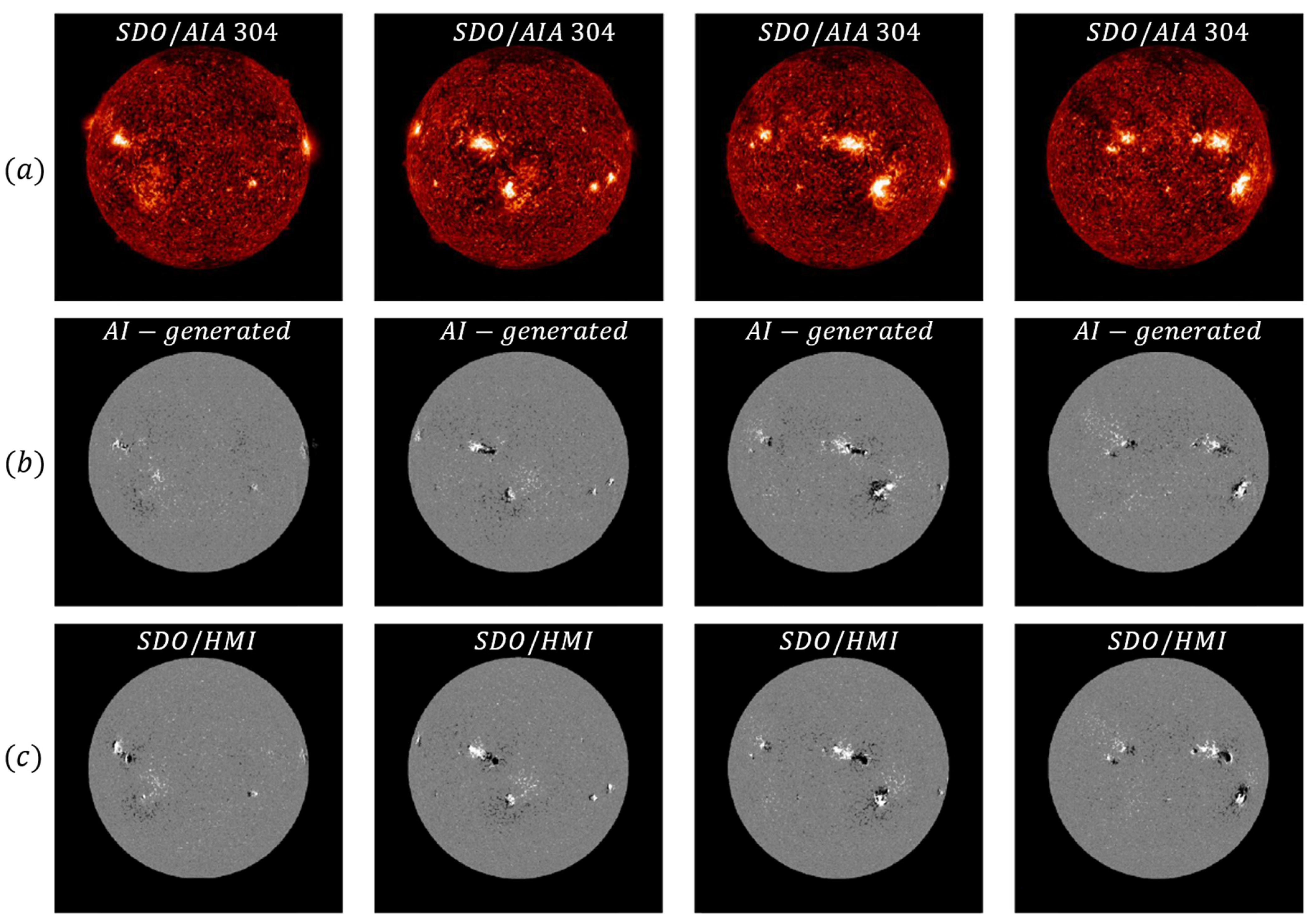
- Kim, T.; Park, E.; Lee, H.; Moon, Y.J.; Bae, S.H.; Lim, D.; Jang, S.; Kim, L.; Cho, I.H.; Choi, M.; et al. Solar farside magnetograms from deep learning analysis of STEREO/EUVI data. Nat. Astron. 2019, 3, 397–400. [Google Scholar] [CrossRef]
- Rengasamy, D.; Hervé, M.P.; Grazziela, F.P. Deep Learning Approaches to Aircraft Maintenance, Repair and Overhaul: A Review. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Yairi, T. Automated crater detection algorithms from a machine learning perspective in the convolutional neural network era. Adv. Space Res. 2019, 64, 1615–1628. [Google Scholar] [CrossRef]
- Lee, H. Trends in Deep Learning Technology to Improve Crater Recognition on the Moon. Curr. Ind. Technol. Trends Aerosp. 2019, 17, 103–112. [Google Scholar]
- Jia, Y.; Wan, G.; Liu, L.; Wang, J.; Wu, Y.; Xue, N.; Wang, Y.; Yang, R. Split-Attention Networks with Self-Calibrated Convolution for Moon Impact Crater Detection from Multi-Source Data. Remote Sens. 2021, 13, 3193. [Google Scholar] [CrossRef]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Tamayo, D.; Menou, K. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.; Wan, G.; Liu, L.; Wu, Y.; Zhang, C. Automated Detection of Lunar Craters Using Deep Learning. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020. [Google Scholar]
- Ali-Dib, M.; Menou, K.; Jackson, A.P.; Zhu, C.; Hammond, N. Automated crater shape retrieval using weakly-supervised deep learning. Icarus 2020, 345, 113749. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Li, Y.; Zhang, T.; Zhu, X.; Sun, S.; Gao, X. Lunar features detection for energy discovery via deep learning. Appl. Energy 2021, 296, 117085. [Google Scholar] [CrossRef]
- Wilhelm, T.; Grzeszick, R.; Fink, G.A.; Wöhler, C. Unsupervised Learning of Scene Categories on the Lunar Surface. In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, VISIGRAPP 2019, Prague, Czech Republic, 25–27 February 2019; pp. 614–621. [Google Scholar]
- Roy, H.; Chaudhury, S.; Yamasaki, T.; DeLatte, D.; Ohtake, M.; Hashimoto, T. Lunar surface image restoration using U-net based deep neural networks. arXiv 2019, arXiv:1904.06683. [Google Scholar]
- Lesnikowski, A.; Bickel, V.T.; Angerhausen, D. Unsupervised distribution learning for lunar surface anomaly detection. arXiv 2020, arXiv:2001.04634. [Google Scholar]
- Xia, W.; Wang, X.; Zhao, S.; Jin, H.; Chen, X.; Yang, M.; Wu, X.; Hu, C.; Zhang, Y.; Shi, Y.; et al. New maps of lunar surface chemistry. Icarus 2019, 321, 200–215. [Google Scholar] [CrossRef]
- Mirza, M.; Osindero, S. Conditional Generative Adversarial Nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Chen, X.; Duan, Y.; Houthooft, R.; Schulman, J.; Sutskever, I.; Abbeel, P. Infogan: Interpretable representation learning by information maximizing generative adversarial nets. Adv. Neural Inf. Process. Syst. 2016, 29, 2172–2180. [Google Scholar]
- Zhao, J.; Mathieu, M.; LeCun, Y. Energy-based Generative Adversarial Network. arXiv 2017, arXiv:1609.03126v4. [Google Scholar]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks. arXiv 2016, arXiv:1511.06434. [Google Scholar]
- Zhang, H.; Goodfellow, I.; Metaxas, D.; Odena, A. Self-Attention Generative Adversarial Networks. In Proceedings of the 36th International Conference on Machine Learning, PMLR, Long Beach, CA, USA, 9–15 June 2019; Volume 97, pp. 7354–7363. [Google Scholar]
- Karras, T.; Aila, T.; Laine, S.; Lehtinen, J. Progressive Growing of GANs for Improved Quality, Stability, and Variation. In Proceedings of the 6th International Conference on Learning Representations, ICLR, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Gurumurthy, S.; Kiran Sarvadevabhatla, R.; Venkatesh Babu, R. Deligan: Generative adversarial networks for diverse and limited data. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 22–25 July 2017; pp. 166–174. [Google Scholar]
- Brock, A.; Donahue, J.; Simonyan, K. Large Scale GAN Training for High Natural Image Synthesis. arXiv 2018, arXiv:1809.11096. [Google Scholar]
- Karras, T.; Laine, S.; Aila, T. A Style-Based Generator Architecture for Generative Adversarial Networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 4401–4410. [Google Scholar]
- Karras, T.; Laine, S.; Aittala, M.; Hellsten, J.; Lehtinen, J.; Aila, T. Analyzing and Improving the Image Quality of StyleGAN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 8110–8119. [Google Scholar]
- Anokhin, I.; Demochkin, K.; Khakhulin, T.; Sterkin, G.; Lempotsky, V.; Korzhenkov, D. Image Generators With Conditionally-Independent Pixel Synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 14278–14287. [Google Scholar]
- Mescheder, L.; Nowozin, S.; Geiger, A. The numerics of gans. In Proceedings of the Advances in Neural Information Processing Systems, NIPS, Long Beach, CA, USA, 4–9 December 2017; pp. 1825–1835. [Google Scholar]
- Bousmalis, K.; Silberman, N.; Dohan, D.; Erhan, D.; Krishnan, D. Unsupervised pixel-level domain adaptation with generative adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Honolulu, Honolulu, HI, USA, 22–26 July 2017; pp. 3722–3731. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein GAN. arXiv 2017, arXiv:1701.07875. [Google Scholar]
- Gulrajani, I.; Ahmed, F.; Arjovsky, M.; Dumoulin, V.; Courville, A. Improved Training of Wasserstein GANs. arXiv 2017, arXiv:1704.00028. [Google Scholar]
- Berthelot, D.; Schumm, T.; Metz, L. BEGAN: Boundary Equilibrium Generative Adversarial Networks. arXiv 2017, arXiv:1703.10717v4. [Google Scholar]
- Miyato, T.; Kataoka, T.; Koyama, M.; Yoshida, Y. Spectral Normalization for Generative Adversarial Networks. In Proceedings of the ICLR, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Mao, X.; Li, Q.; Xie, H.; Lau, R.Y.K.; Wang, Z.; Smolley, S.P. Least Squares Generative Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision, ICCV, Venice, Italy, 22–29 October 2017; pp. 2794–2802. [Google Scholar]
- Heusel, M.; Ramsauer, H.; Unterthiner, T.; Nessler, B.; Hochreiter, S. GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium. In Proceedings of the 31st Conference on Neural Information Processing Systems, NIPS, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Kim, T.; Cha, M.; Kim, H.; Lee, J.K.; Kim, J. Learning to Discover Cross-Domain Relations with Generative Adversarial Networks. In Proceedings of the 34th International Conference on Machine Learning, ICML, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Choi, Y.; Choi, M.; Kim, M.; Ha, J.W.; Kim, S.; Choo, J. Stargan: Unified generative adversarial networks for multi-domain image-to-image translation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8789–8797. [Google Scholar]
- Salimans, T.; Goodfellow, I.; Zaremba, W.; Cheung, V.; Radford, A.; Chen, X. Improved techniques for training gans. Adv. Neural Inf. Process. Syst. 2016, 29, 2234–2242. [Google Scholar]
- Lucic, M.; Kurach, K.; Michalski, M.; Gelly, S.; Bousquet, O. Are GANs Created Equal? A Large-Scale Study. In Proceedings of the Advances in Neural Information Processing Systems, NeurIPS, Montreal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Ma, J.; Yu, W.; Chen, C.; Liang, P.; Guo, X.; Juang, J. Pan-GAN: An unsupervised pan-sharpening method for remote sensing image fusion. Inf. Fusion 2020, 62, 110–120. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, H.; Xu, Q.; Liu, X.; Wang, Y. PSGAN: A Generative Adversarial Network for Remote Sensing Image Pan-Sharpening. IEEE Trans. Geosci. Remote Sens. 2020, 59, 10227–10242. [Google Scholar] [CrossRef]
- Jiang, K.; Wang, Z.; Yi, P.; Wang, G.; Lu, T.; Jiang, J. Edge-Enhanced GAN for Remote Sensing Image Superresolution. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5799–5812. [Google Scholar] [CrossRef]
- Rabbi, J.; Ray, N.; Schubert, M.; Chowdhury, S.; Chao, D. Small-Object Detection in Remote Sensing Images with End-to-End Edge-Enhanced GAN and Object Detector Network. Remote Sens. 2020, 12, 1432. [Google Scholar] [CrossRef]
- Tao, Y.; Xu, M.; Zhong, Y.; Cheng, Y. GAN-Assisted Two-Stream Neural Network for High-Resolution Remote Sensing Image Classification. Remote Sens. 2017, 9, 1328. [Google Scholar] [CrossRef] [Green Version]
- Gong, Y.; Liao, P.; Zhang, X.; Zhang, L.; Chen, G.; Zhu, K.; Tan, X.; Lv, Z. Enlighten-GAN for Super Resolution Reconstruction in Mid-Resolution Remote Sensing Images. Remote Sens. 2021, 13, 1104. [Google Scholar] [CrossRef]
- Ma, W.; Pan, Z.; Guo, J.; Lei, B. Super-Resolution of Remote Sensing Images Based on Transferred Generative Adversarial Network. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Park, S.W.; Ko, J.S.; Huh, J.H.; Kim, J.C. Review on Generative Adversarial Networks: Focusing on Computer Vision and Its Applications. Electronics 2021, 10, 1216. [Google Scholar] [CrossRef]
- Park, S.W.; Huh, J.H.; Kim, J.C. BEGAN v3: Avoiding Mode Collapse in GANs Using Variational Inference. Electronics 2020, 9, 688. [Google Scholar] [CrossRef] [Green Version]
- Radford, A.; Wu, J.; Child, R.; Luan, D.; Amodei, D.; Sutskever, I. Language models are unsupervised multitask learners. OpenAI Blog 2019, 1, 9. [Google Scholar]
- Payne, C. MuseNet. Available online: https://openai.com/blog/musenet (accessed on 17 October 2021).
- Mass, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier Nonlinearities Improve Neural Network Acoustic Models. In Proceeding of International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; p. 30. [Google Scholar]
- Nair, V.; Hinton, G. Rectified Linear Units Improve Restricted Boltzmann Machines. In Proceedings of the 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Stephen, I. Perceptron-based learning algorithms. IEEE Trans. Neural Netw. 1990, 1, 50. [Google Scholar]
- Google Earth View. Available online: https://earthview.withgoogle.com/ (accessed on 17 October 2021).
- AIcrowd. Available online: https://www.crowdai.org/challenges/mapping-challenge (accessed on 17 October 2021).
- Sajjadi, S.M.; Bachem, O.; Lucic, M.; Bousquet, O.; Gelly, S. Assessing generative models via precision and recall. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; pp. 5228–5237. [Google Scholar]
- Kaplanyan, A.S.; Sochenov, A.; Leimkühler, T.; Okunev, M.; Goodall, T.; Rufo, G. DeepFovea: Neural reconstruction for foveated rendering and video compression using learned statistics of natural videos. ACM Trans. Graph. 2019, 38, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-realistic single image super-resolution using a generative adversarial network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4681–4690.
- Grush, L. Amazon’s Alexa and Cisco’s Webex Are Heading to Deep Space on NASA’s Upcoming Moon Mission. Available online: https://www.theverge.com/2022/1/5/22866746/nasa-artemis-i-amazon-alexa-cisco-webex-lockheed-martin-orion (accessed on 25 February 2022).
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y.; Chen, C.L.P. Review of advanced guidance and control algorithm for space/aerospace vehicles. Prog. Aerosp. Sci. 2021, 122, 100696. [Google Scholar] [CrossRef]
- Sutthithatip, S.; Perinpanayagam, S.; Aslam, S.; Wileman, A. Explainable AI in Aerospace for Enhanced System Performance. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021. [Google Scholar]
- Starek, J.A.; Açıkmeşe, B.; Nesnas, I.A.; Pavone, M. Spacecraft autonomy challenges for next-generation space missions. In Advances in Control System Technology for Aerospace Applications; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–48. [Google Scholar]
- Das, M.; Sahu, S.; Parhi, D.R. Composite materials and their damage detection using AI techniques for aerospace application: A brief review. Mater. Today Proc. 2021, 44, 955–960. [Google Scholar] [CrossRef]
- Yang, C.; Zhao, H.; Bruzzone, L.; Benediktsson, J.A.; Liang, Y.; Liu, B.; Zeng, X.; Guan, R.; Li, C.; Ouyang, Z. Lunar impact crater identification and age estimation with Chang’E data by deep and transfer learning. Nat. Commun. 2020, 11, 1–15. [Google Scholar] [CrossRef]
- Bickel, V.T.; Moseley, B.; Lopez-Francos, I.; Shirley, M. Peering into lunar permanently shadowed regions with deep learning. Nat. Commun. 2021, 12, 1–12. [Google Scholar] [CrossRef]
- Moseley, B.; Bickel, V.; Lopez-Francos, I.G.; Rana, L. Extreme Low-Light Environment-Driven Image Denoising over Permanently Shadowed Lunar Regions with a Physical Noise Model. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 6317–6327. [Google Scholar]
- Singh, A. Review Article Digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef] [Green Version]
- Asokan, A.; Anitha, J. Change detection techniques for remote sensing applications: A survey. Earth Sci. Inf. 2019, 12, 143–160. [Google Scholar] [CrossRef]
- Bandara, W.G.C.; Patel, V.M. A Transformer-Based Siamese Network for Change Detection. arXiv 2022, arXiv:2201.01293. [Google Scholar]
- Wang, Z.; Chen, J.; Hoi, S.C.H. Deep Learning for Image Super-Resolution: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 3365–3387. [Google Scholar] [CrossRef] [Green Version]
- Anwar, S.; Khan, S.; Barnes, N. A Deep Journey into Super-resolution: A Survey. ACM Comput. Surv. 2021, 53, 1–34. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Research Area | Used Model |
|---|---|---|
| Delatte et al. [13] | Survey Papers (Usually, crater detection) | - |
| Lee Honnhee [14] | Review Papers (Usually, crater detection) | - |
| Jia et al. [15] | Lunar surface detection | Self-calibrated convolution |
| Silburt et al. [16] | Lunar surface detection | CNNs (based U-Net) |
| Yutong Jia et al. [17] | Lunar surface detection | CNNs (based U-Net) |
| Ali-Dib et al. [18] | Lunar surface detection | CNNs (based Mask R-CNN) |
| Shen et al. [19] | Lunar surface detection | High-Resolution-Moon-Net |
| Wilhelm et al. [20] | Unsupervised learning | CNNs (based VGG16) |
| Roy et al. [21] | Unsupervised learning | CNNs (based U-Net) |
| Lesnikowski et al. [22] | Unsupervised learning | CNNs (based VAE) |
| Xia et al. [23] | Abundance map of oxide and magnesium | DNN |
| Category | Model/Method |
|---|---|
| Architecture | CGAN [24]; InfoGAN [25]; EBGAN [26]; DCGAN [27]; SAGAN [28]; PGGAN [29]; DeLiGAN [30]; BigGAN [31]; StyleGAN [32]; StyleGANv2 [33]; CIPS [34] |
| Stability | Consensus Optimization [35]; PixelDA [36]; WGAN [37]; Gradient penalty [38]; BEGAN [39]; Spectral Normalization [40]; LSGAN [41]; TTUR & FID [42] |
| Image-to-Image Translation | DiscoGAN [43]; pix2pix [44]; CycleGAN [45]; StarGAN [46] |
| Author | Used Model | Research Area |
|---|---|---|
| Kim et al. [48] | CGAN | Image Generating |
| Jiayi Ma et al. [49] | Pan-GAN | Pan-sharpening |
| Qingjie Liu et al. [50] | PSGAN | Pan-sharpening |
| Kui Jiang et al. [51] | EEGAN | SR |
| Jakaria Rabbit et al. [52] | EESRGAN | SR + Object Detection |
| Yiting Tao et al. [53] | Residual network + SCAE | SR |
| Yuanfu Gong et al. [54] | Enlighten-GAN | SR |
| Wen Ma et al. [55] | TGAN | SR |
| Dataset | Visual Results | |||||||
|---|---|---|---|---|---|---|---|---|
| Satellite-Landscapes |  |  |  |  |  |  |  |  |
| Satellite-Buildings |  |  |  |  |  |  |  |  |
| Landscapes |  | |||||||
 | ||||||||
 | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-C.; Lim, S.-C.; Choi, J.; Huh, J.-H. Review for Examining the Oxidation Process of the Moon Using Generative Adversarial Networks: Focusing on Landscape of Moon. Electronics 2022, 11, 1303. https://doi.org/10.3390/electronics11091303
Kim J-C, Lim S-C, Choi J, Huh J-H. Review for Examining the Oxidation Process of the Moon Using Generative Adversarial Networks: Focusing on Landscape of Moon. Electronics. 2022; 11(9):1303. https://doi.org/10.3390/electronics11091303
Chicago/Turabian StyleKim, Jong-Chan, Su-Chang Lim, Jaehyeon Choi, and Jun-Ho Huh. 2022. "Review for Examining the Oxidation Process of the Moon Using Generative Adversarial Networks: Focusing on Landscape of Moon" Electronics 11, no. 9: 1303. https://doi.org/10.3390/electronics11091303