
Enhanced Control of Three-Phase Grid-Connected Renewables with Fault Ride-Through Capability under Voltage Sags





Abstract
:1. Introduction
2. Main Elements of the Grid-Connected Renewable Energy System
- A DC voltage source;
- A power conditioner represented by a three-phase VSI;
- The L filter’s line inductance;
- Grid impedance Z at the point of common coupling (PCC);
- The transformer for galvanic isolation;
- Equivalent three-phase mains.
- A synchronization algorithm (DSOGI-FLL);
- A current references generator (CRG);
- Current controllers using PR regulators;
- Pulse width modulation (PWM) block.
3. Methodology
3.1. Control Requirements According to International Standards and National Regulations
3.2. Proposed Low-Voltage Ride-Through Control Algorithm
- The inverter was disconnected from the grid for long time duration voltage sags.
- The LVRT capability was activated for short time duration voltage sags according to the voltage profile from Figure 2a.
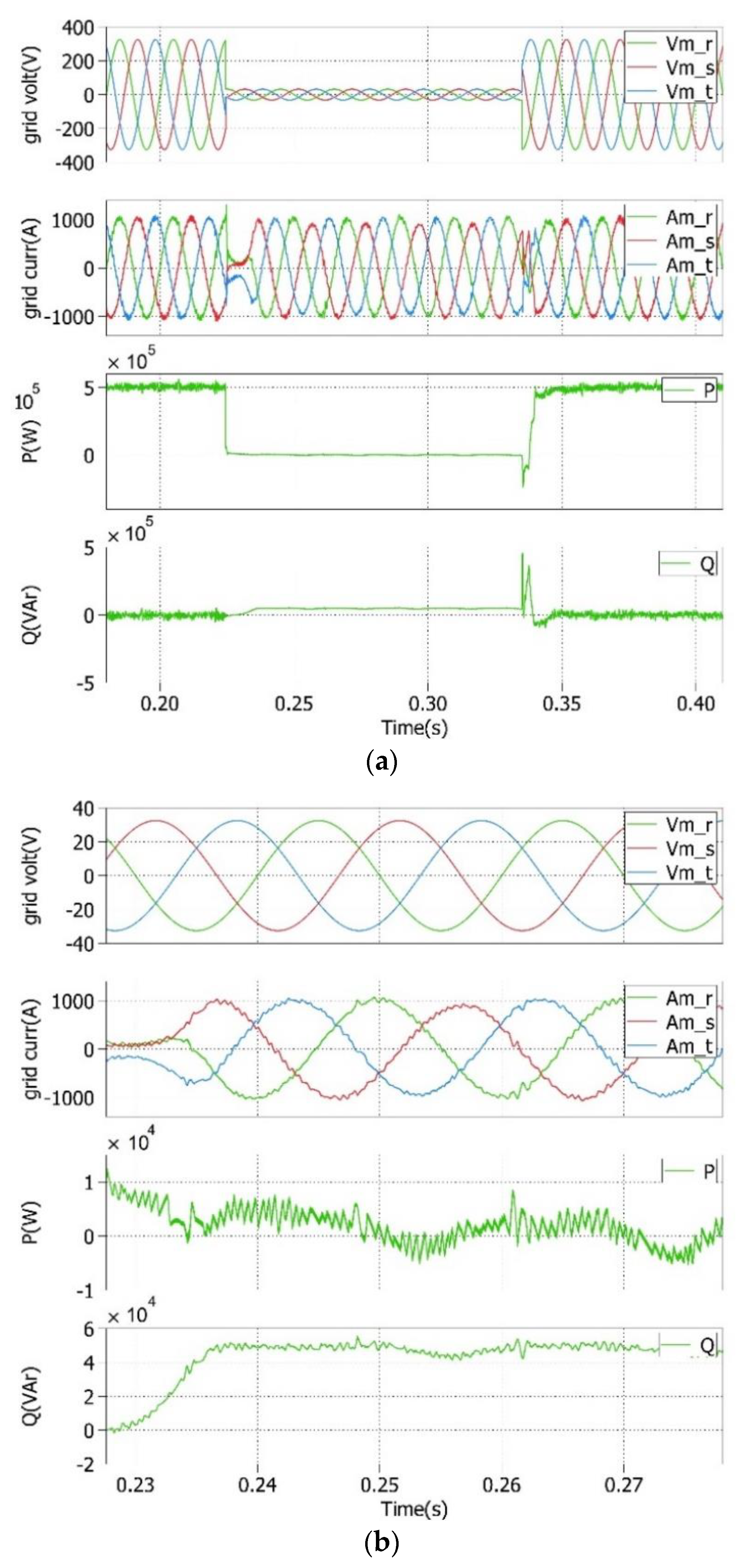
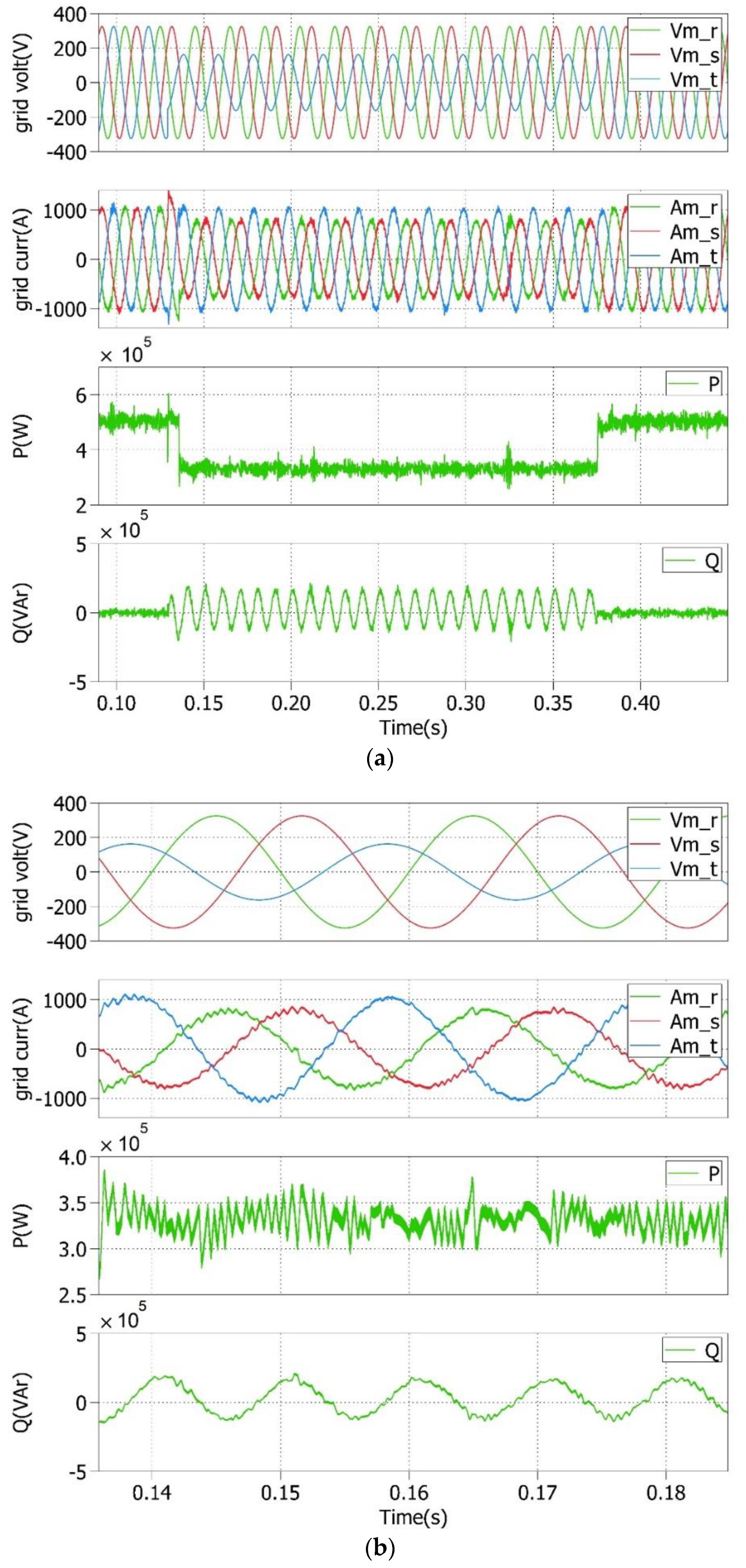
4. Performed Experiments and Results
4.1. Realized Case Study
4.2. Performed Experiments
- A symmetrical (balanced) sag of 90% amplitude;
- An asymmetrical (unbalanced) sag of 90% amplitude of phase three;
- An asymmetrical (unbalanced) sag of 50% amplitude of phase three.
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronyms | |
| ADC | Analog-to-digital converter |
| CHIL | Controller hardware-in-the-loop |
| CRG | Current references generator |
| DG | Distributed generator |
| DER | Distributed energy resources |
| DFIG | Doubly fed induction generators |
| DRTS | Digital real-time simulator |
| DSOGI-FLL | Dual second-order generalized integrator FLL |
| FLL | Frequency-locked loop |
| LVRT | Low-voltage ride-through |
| MMC | Modular multilevel converter |
| MPC | Model predictive control |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| MSOGI-FLL | Multiple second-order generalized integrator FLL |
| non-MPPT | Non-maximum power point tracking |
| NS | Negative-sequence component |
| PCC | Point of common coupling |
| PF | Power factor |
| PLL | Phase-locked loop |
| PR | Proportional resonant |
| PS | Positive-sequence component |
| PV | Photovoltaic |
| PWM | Pulse width modulation |
| RSC | Rotor-side converter |
| SRF | Synchronous reference frame |
| VSI | Voltage source inverter |
| Symbols | |
| c(t) | Carrier signal of the PWM |
| fCI | Crossover frequency of the current loop |
| fsw | Switching frequency |
| iuvw | three-phase currents through the inverter |
| igrst | three-phase currents delivered to the mains |
| i*αβ± | αβ reference commands of the PS and the NS values of the instantaneous three-phase currents through the inverter |
| i*αβP(Q) | αβ reference commands of P (Q) of the instantaneous three-phase currents through the inverter |
| iDC | DC current at the input of the VSI |
| iαβ | αβ components of the instantaneous three-phase currents through the inverter |
| iαβ* | αβ reference commands of the instantaneous three-phase currents through the inverter |
| KIαβ(KPαβ) | Integral (proportional) constant of the PR regulators |
| KPWM | Gain of the three-phase VSI |
| L | Inductance of the L filter |
| mabc(t) | Three-phase modulating signals of the PWM |
| mαβ | αβ components of the three-phase modulating signals of the PWM |
| P(Q) | Instantaneous active (reactive) power in normal operating conditions |
| P*(Q*) | Reference command for P(Q) |
| Q*normal | Reference command for the normal reactive power |
| P0 (Q0) | Average active (reactive) power |
| P0− (Q0−) | NS values of the average active (reactive) power |
| P0+ (Q0+) | PS values of the average active (reactive) power |
| Pfault (Qfault) | Instantaneous active (reactive) power during voltage sags conditions (or faulty operating conditions) |
| Pmax | Maximum active power delivered to the mains |
| P*max | Reference command of Pmax |
| Oscillating active (reactive) power at 2ω0′ | |
| PMI | Phase margin of the current loop |
| TS | Step size of the power subsystem |
| TREG | Step size of the control subsystem |
| Sfault | Maximum apparent power during voltage sags conditions (or faulty operating conditions) |
| Snom | Nominal apparent power |
| ug(αβ) | αβ components of the instantaneous three-phase grid voltages |
| ug(αβ)± | αβ components of the instantaneous PS and NS values of the three-phase grid voltages |
| ugnom | Nominal root-mean-square (rms) value of the phase-to-neutral three-phase grid voltages |
| ugrst | Instantaneous values of the phase-to-neutral three-phase grid voltages (the mains) |
| Vfault | Normalized depth of the voltage sag |
| Z | Impedance of the mains |
| ω0 | Fundamental nominal frequency |
| ω0′ | Estimated frequency of the mains |
| ωo | Resonant angular frequency of the PR regulator |
| ωc | Cut-off frequency of the PR regulator |
References
- Meyer, R.; Zlotnik, A.; Mertens, A. Fault Ride-Through Control of Medium-Voltage Converters with LCL Filter in Distributed Generation Systems. IEEE Trans. Ind. Appl. 2014, 50, 3448–3456. [Google Scholar] [CrossRef]
- Habib, A.; Sou, C.; Hafeez, H.M.; Arshad, A. Evaluation of the Effect of High Penetration of Renewable Energy Sources (RES) on System Frequency Regulation Using Stochastic Risk Assessment Technique (an Approach Based on Improved Cumulant). Renew. Energy 2018, 127, 204–212. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q.; Sujod, M.Z. Modeling and Control of Grid-Connected Photovoltaic Power Plant With Fault Ride-Through Capability. J. Sol. Energy Eng. 2017, 140, 021001. [Google Scholar] [CrossRef] [Green Version]
- Etxegarai, A.; Eguia, P.; Torres, E.; Buigues, G.; Iturregi, A. Current Procedures and Practices on Grid Code Compliance Verification of Renewable Power Generation. Renew. Sustain. Energy Rev. 2017, 71, 191–202. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Wojcik, J.D.; Wang, J.; Li, D.; Draganescu, M.; Li, Y.; Miao, S. Review of Voltage and Frequency Grid Code Specifications for Electrical Energy Storage Applications. Energies 2018, 11, 1070. [Google Scholar] [CrossRef] [Green Version]
- Robles, E.; Haro-Larrode, M.; Santos-Mugica, M.; Etxegarai, A.; Tedeschi, E. Comparative Analysis of European Grid Codes Relevant to Offshore Renewable Energy Installations. Renew. Sustain. Energy Rev. 2019, 102, 171–185. [Google Scholar] [CrossRef]
- Dehghani Tafti, H.; Maswood, A.I.; Konstantinou, G.; Pou, J.; Kandasamy, K.; Lim, Z.; Ooi, G.H.P. Low-Voltage Ride-Thorough Capability of Photovoltaic Grid-Connected Neutral-Point-Clamped Inverters with Active/Reactive Power Injection. IET Renew. Power Gener. 2017, 11, 1182–1190. [Google Scholar] [CrossRef]
- Oon, K.H.; Tan, C.K.; Bakar, A.H.A.; Che, H.S.; Mokhlis, H.; Illias, H.A. Establishment of Fault Current Characteristics for Solar Photovoltaic Generator Considering Low Voltage Ride through and Reactive Current Injection Requirement. Renew. Sustain. Energy Rev. 2018, 92, 478–488. [Google Scholar] [CrossRef]
- Huka, G.B.; Li, W.; Chao, P.; Peng, S. A Comprehensive LVRT Strategy of Two-Stage Photovoltaic Systems under Balanced and Unbalanced Faults. Int. J. Electr. Power Energy Syst. 2018, 103, 288–301. [Google Scholar] [CrossRef]
- Todorović, I.; Grabić, S.; Ivanović, Z. Grid-Connected Converter Active and Reactive Power Production Maximization with Respect to Current Limitations during Grid Faults. Int. J. Electr. Power Energy Syst. 2018, 101, 311–322. [Google Scholar] [CrossRef]
- Cupertino, A.F.; Xavier, L.S.; Brito, E.M.S.; Mendes, V.F.; Pereira, H.A. Benchmarking of Power Control Strategies for Photovoltaic Systems under Unbalanced Conditions. Int. J. Electr. Power Energy Syst. 2019, 106, 335–345. [Google Scholar] [CrossRef]
- Talha, M.; Raihan, S.R.S.; Rahim, N.A. PV Inverter with Decoupled Active and Reactive Power Control to Mitigate Grid Faults. Renew. Energy 2020, 162, 877–892. [Google Scholar] [CrossRef]
- Islam, M.R.; Hasan, J.; Shipon, M.R.R.; Sadi, M.A.H.; Abuhussein, A.; Roy, T.K. Neuro Fuzzy Logic Controlled Parallel Resonance Type Fault Current Limiter to Improve the Fault Ride through Capability of DFIG Based Wind Farm. IEEE Access 2020, 8, 115314–115334. [Google Scholar] [CrossRef]
- Ali, M.A.S.; Mehmood, K.K.; Baloch, S.; Kim, C.H. Modified Rotor-Side Converter Control Design for Improving the LVRT Capability of a DFIG-Based WECS. Electr. Power Syst. Res. 2020, 186, 106403. [Google Scholar] [CrossRef]
- Mei, H.; Jia, C.; Fu, J.; Luan, X. Low Voltage Ride through Control Strategy for MMC Photovoltaic System Based on Model Predictive Control. Int. J. Electr. Power Energy Syst. 2021, 125, 106530. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Iravani, M.R. A Method for Synchronization of Power Electronic Converters in Polluted and Variable-Frequency Environments. IEEE Trans. Power Syst. 2004, 19, 1263–1270. [Google Scholar] [CrossRef]
- Rodríguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled Double Synchronous Reference Frame PLL for Power Converters Control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. Advanced Grid Synchronization System for Power Converters under Unbalanced and Distorted Operating Conditions. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 5173–5178. [Google Scholar]
- Rodríguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Rey-Boué, A.B.; Guerrero-Rodríguez, N.F.; Stöckl, J.; Strasser, T.I. Modeling and Design of the Vector Control for a Three-Phase Single-Stage Grid-Connected PV System with LVRT Capability According to the Spanish Grid Code. Energies 2019, 12, 2899. [Google Scholar] [CrossRef] [Green Version]
- Guerrero-Rodríguez, N.F.; Rey-Boué, A.B. Modelling, Simulation and Experimental Verification for Renewable Agents Connected to a Distorted Utility Grid Using a Real-Time Digital Simulation Platform. Energy Convers. Manag. 2014, 84, 108–121. [Google Scholar] [CrossRef]
- Díaz, M.; Cárdenas, R.; Wheeler, P.; Clare, J.; Rojas, F. Resonant Control System for Low-Voltage Ride-through in Wind Energy Conversion Systems. IET Power Electron. 2016, 9, 1297–1305. [Google Scholar] [CrossRef]
- IEC 61400-21:2008|IEC Webstore|Rural Electrification, Wind Power. Available online: https://webstore.iec.ch/publication/5434 (accessed on 14 January 2019).
- Afshari, E.; Moradi, G.R.; Rahimi, R.; Farhangi, B.; Yang, Y.; Blaabjerg, F.; Farhangi, S. Control Strategy for Three-Phase Grid-Connected PV Inverters Enabling Current Limitation under Unbalanced Faults. IEEE Trans. Ind. Electron. 2017, 64, 8908–8918. [Google Scholar] [CrossRef] [Green Version]
- Camacho, A.; Castilla, M.; Miret, J.; Borrell, A.; de Vicuna, L.G. Active and Reactive Power Strategies with Peak Current Limitation for Distributed Generation Inverters during Unbalanced Grid Faults. IEEE Trans. Ind. Electron. 2015, 62, 1515–1525. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible Active Power Control of Distributed Power Generation Systems during Grid Faults. IEEE Trans. Ind. Electron. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodríguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011; ISBN 9781119957201. [Google Scholar]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-Resonant Controllers and Filters for Grid-Connected Voltage-Source Converters. IEE Proc. Electr. Power Appl. 2006, 153, 750. [Google Scholar] [CrossRef] [Green Version]
- Circuit Analysis of A-c Power Systems Vol. I: Shoults D.R: Free Download, Borrow, and Streaming: Internet Archive. Available online: https://archive.org/details/in.ernet.dli.2015.1252/page/n5 (accessed on 31 January 2019).
- Wang, Y.; Yang, P.; Yin, X.; Ma, Y. Evaluation of Low-Voltage Ride-through Capability of a Two-Stage Grid-Connected Three-Level Photovoltaic Inverter. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems, ICEMS, Hangzhou, China, 22–25 October 2014; IEEE: Piscataway, NJ, USA, 2015; pp. 822–828. [Google Scholar]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017; ISBN 9781119307181. [Google Scholar]
- Energinet, D. Technical Regulation 3.2 2 for PV Power Plants with a Power Output above 11 KW; Energinet: Fredericia, Denmark, 2015; pp. 1–96. [Google Scholar]
- Faulstich, A.; Stinke, J.K.; Wittwer, F. Medium Voltage Converter for Permanent Magnet Wind Power Generators up to 5 MW. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; IEEE: Piscataway, NJ, USA, 2005; p. 9. [Google Scholar]
- Buso, S.; Mattavelli, P. Digital Control in Power Electronics; Morgan & Claypool Publishers: San Rafael, CA, USA, 2006; Volume 1, ISBN 9781598291124. [Google Scholar]
- Electrical Engineering Software Plexim. Available online: https://www.plexim.com/ (accessed on 14 January 2019).
- Omar Faruque, M.D.; Strasser, T.; Lauss, G.; Jalili-Marandi, V.; Forsyth, P.; Dufour, C.; Dinavahi, V.; Monti, A.; Kotsampopoulos, P.; Martinez, J.A.; et al. Real-Time Simulation Technologies for Power Systems Design, Testing, and Analysis. IEEE Power Energy Technol. Syst. J. 2015, 2, 63–73. [Google Scholar] [CrossRef]
- Guillaud, X.; Faruque, M.O.; Teninge, A.; Hariri, A.H.; Vanfretti, L.; Paolone, M.; Dinavahi, V.; Mitra, P.; Lauss, G.; Dufour, C.; et al. Applications of Real-Time Simulation Technologies in Power and Energy Systems. IEEE Power Energy Technol. Syst. J. 2015, 2, 103–115. [Google Scholar] [CrossRef] [Green Version]
- Benigni, A.; Strasser, T.; De Carne, G.; Liserre, M.; Cupelli, M.; Monti, A. Real-Time Simulation-Based Testing of Modern Energy Systems: A Review and Discussion. IEEE Ind. Electron. Mag. 2020, 14, 28–39. [Google Scholar] [CrossRef]
- Analog, Embedded Processing, Semiconductor Company, Texas Instruments—TI.Com. Available online: http://www.ti.com/# (accessed on 14 January 2019).
- Jonke, P.; Stockl, J.; Miletic, Z.; Brundlinger, R.; Seitl, C.; Andren, F.; Lauss, G.; Strasser, T. Integrated Rapid Prototyping of Distributed Energy Resources in a Real-Time Validation Environment. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 714–719. [Google Scholar]
- SKM350MB120SCH17 SEMIKRON. Available online: https://www.semikron.com/de/produkte/produktklassen/sic/voll-sic-module/detail/skm350mb120sch17-21920420.html (accessed on 10 February 2020).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Inverter Gain KPWM | |
| Switching frequency fsw | 24.416 kHz |
| Line inductance L | 0.15 mH |
| Mains (AC system ugrst) | 230 Vrms phase-to-neutral, 50 Hz |
| Parameters of the PR Regulator | Value |
|---|---|
| Proportional constant KPαβ | 0.0011 |
| Integral constant KIαβ | 0.1 |
| Resonant angular frequency ωo | 314.16 rad/s |
| Cutoff frequency ωc | 1 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rey-Boué, A.B.; Guerrero-Rodríguez, N.F.; Stöckl, J.; Strasser, T.I. Enhanced Control of Three-Phase Grid-Connected Renewables with Fault Ride-Through Capability under Voltage Sags. Electronics 2022, 11, 1404. https://doi.org/10.3390/electronics11091404
Rey-Boué AB, Guerrero-Rodríguez NF, Stöckl J, Strasser TI. Enhanced Control of Three-Phase Grid-Connected Renewables with Fault Ride-Through Capability under Voltage Sags. Electronics. 2022; 11(9):1404. https://doi.org/10.3390/electronics11091404
Chicago/Turabian StyleRey-Boué, Alexis B., N. F. Guerrero-Rodríguez, Johannes Stöckl, and Thomas I. Strasser. 2022. "Enhanced Control of Three-Phase Grid-Connected Renewables with Fault Ride-Through Capability under Voltage Sags" Electronics 11, no. 9: 1404. https://doi.org/10.3390/electronics11091404