
Improved Rapidly Exploring Random Tree with Bacterial Mutation and Node Deletion for Offline Path Planning of Mobile Robot



Abstract
:1. Introduction
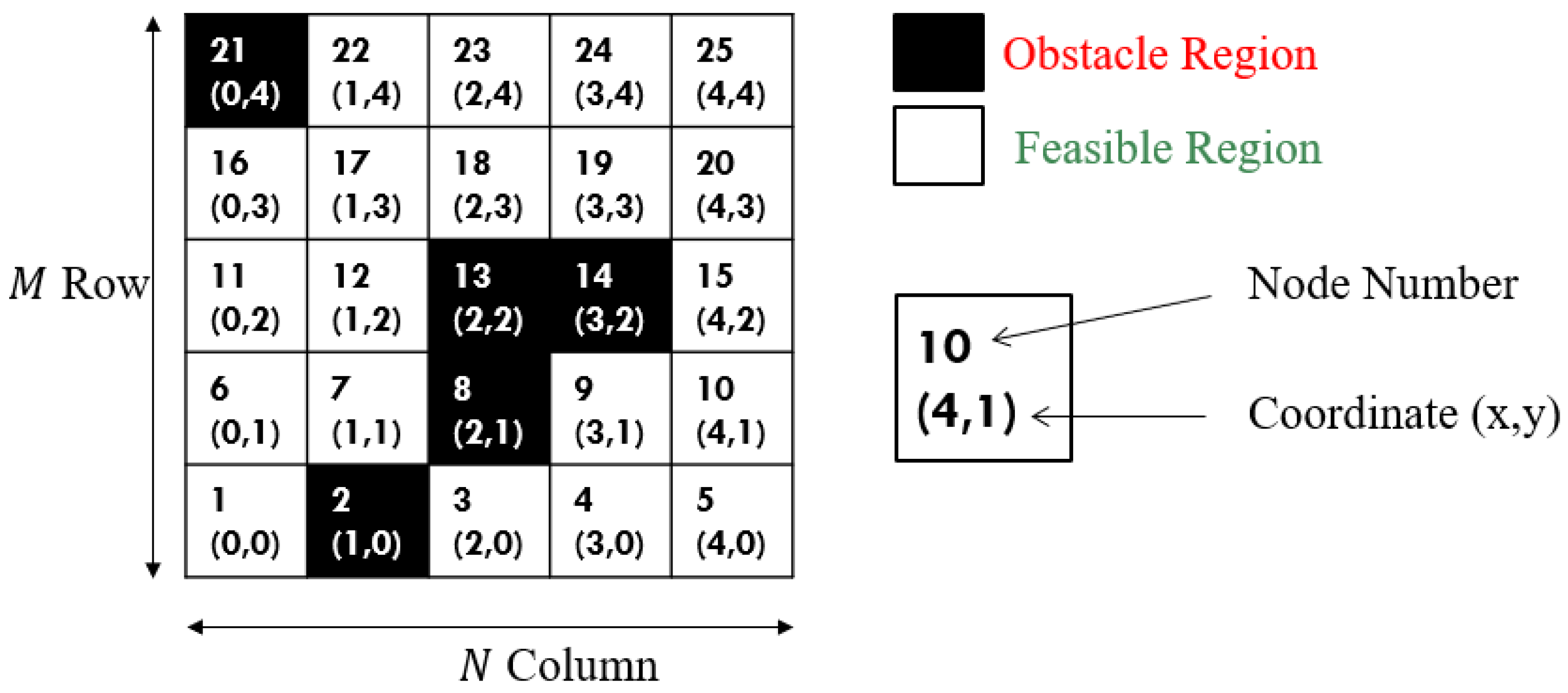
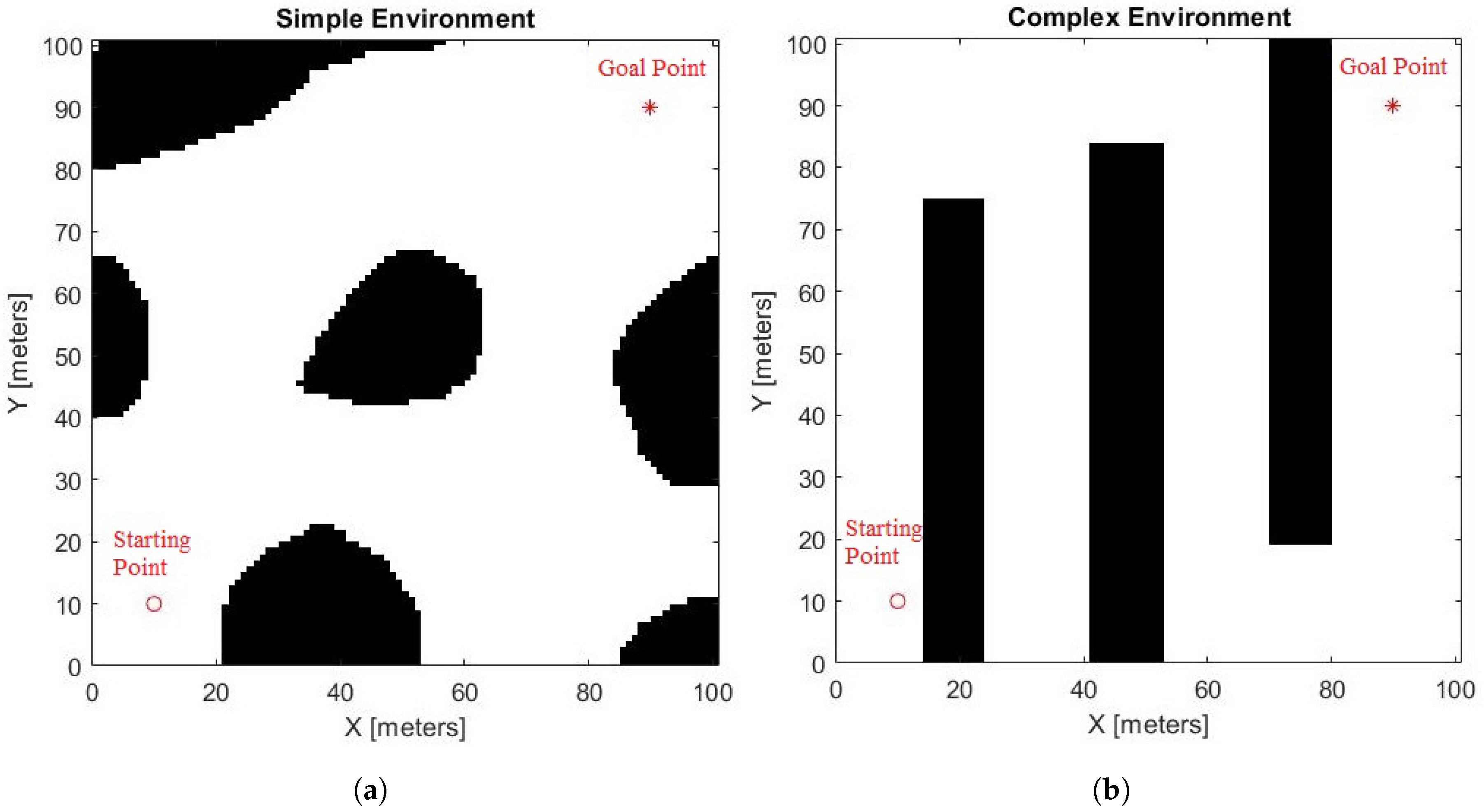
2. Environment and Mapping
3. Traditional RRT* Algorithm, Bacterial Mutation, and Local Search Operators
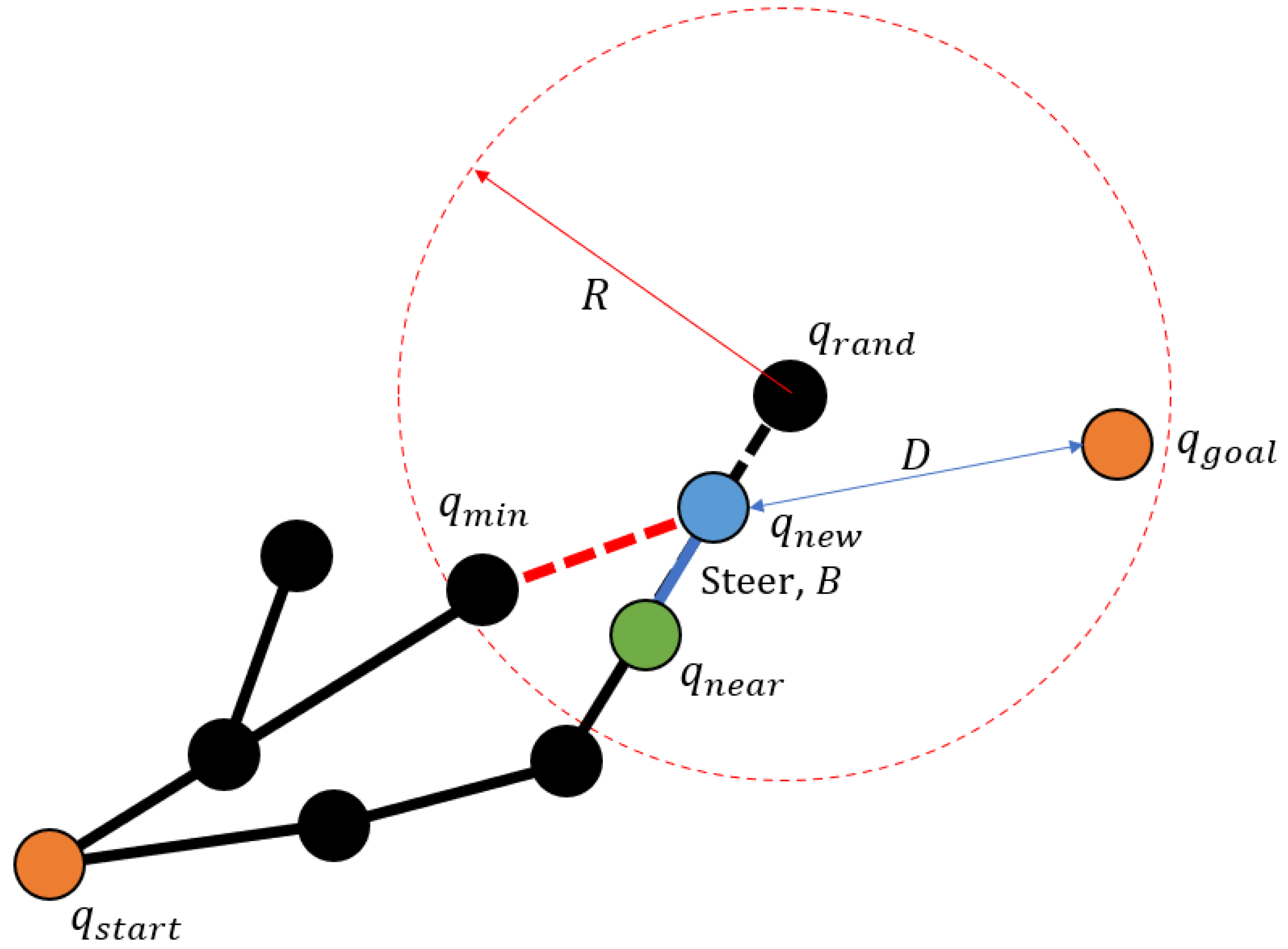
3.1. RRT* Algorithm
| Algorithm 1 RRT* Algorithm |
|
3.2. Bacterial Mutation Operator
3.3. Node Deletion Operator
4. Proposed RRT* Algorithm
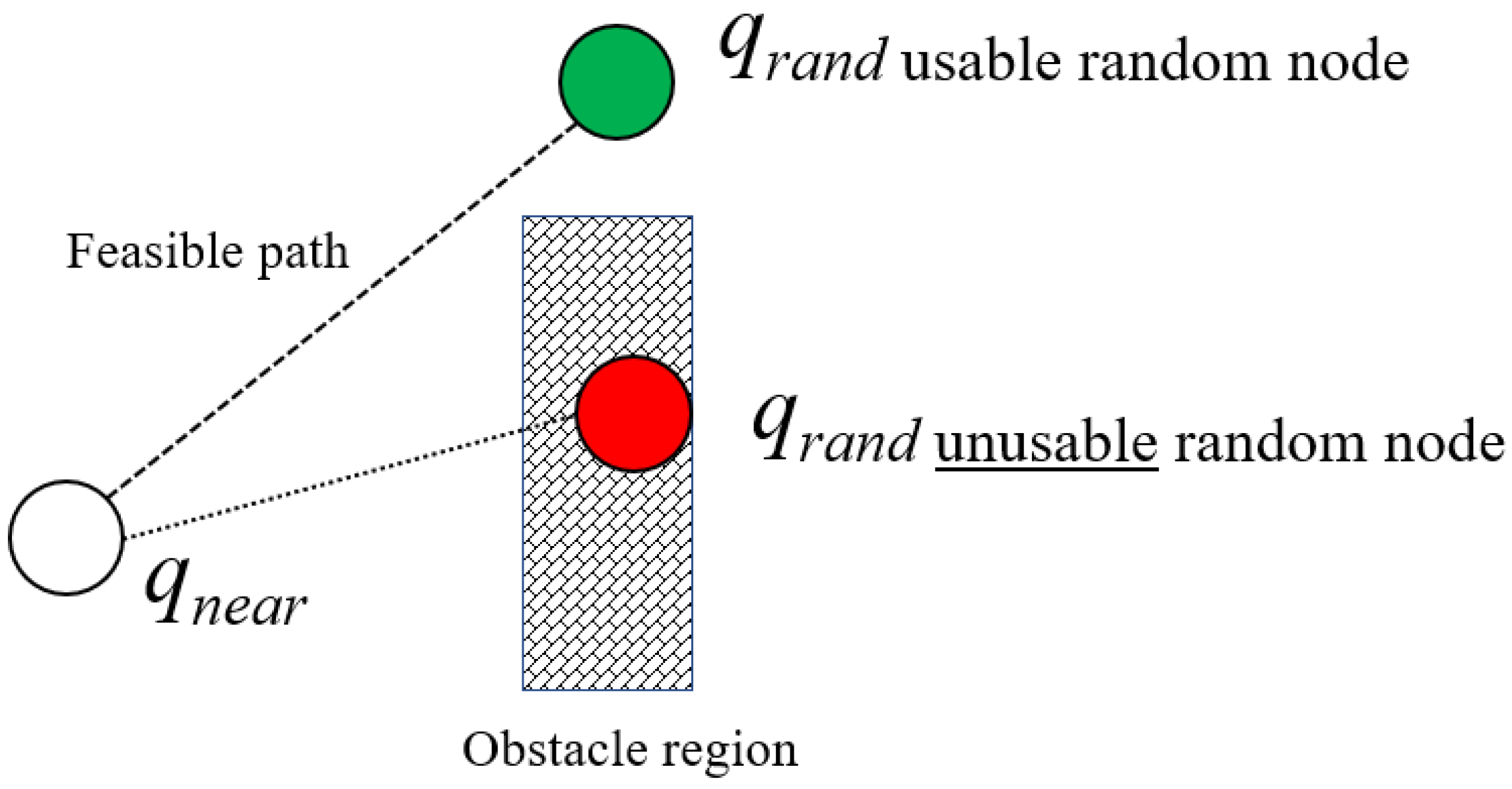
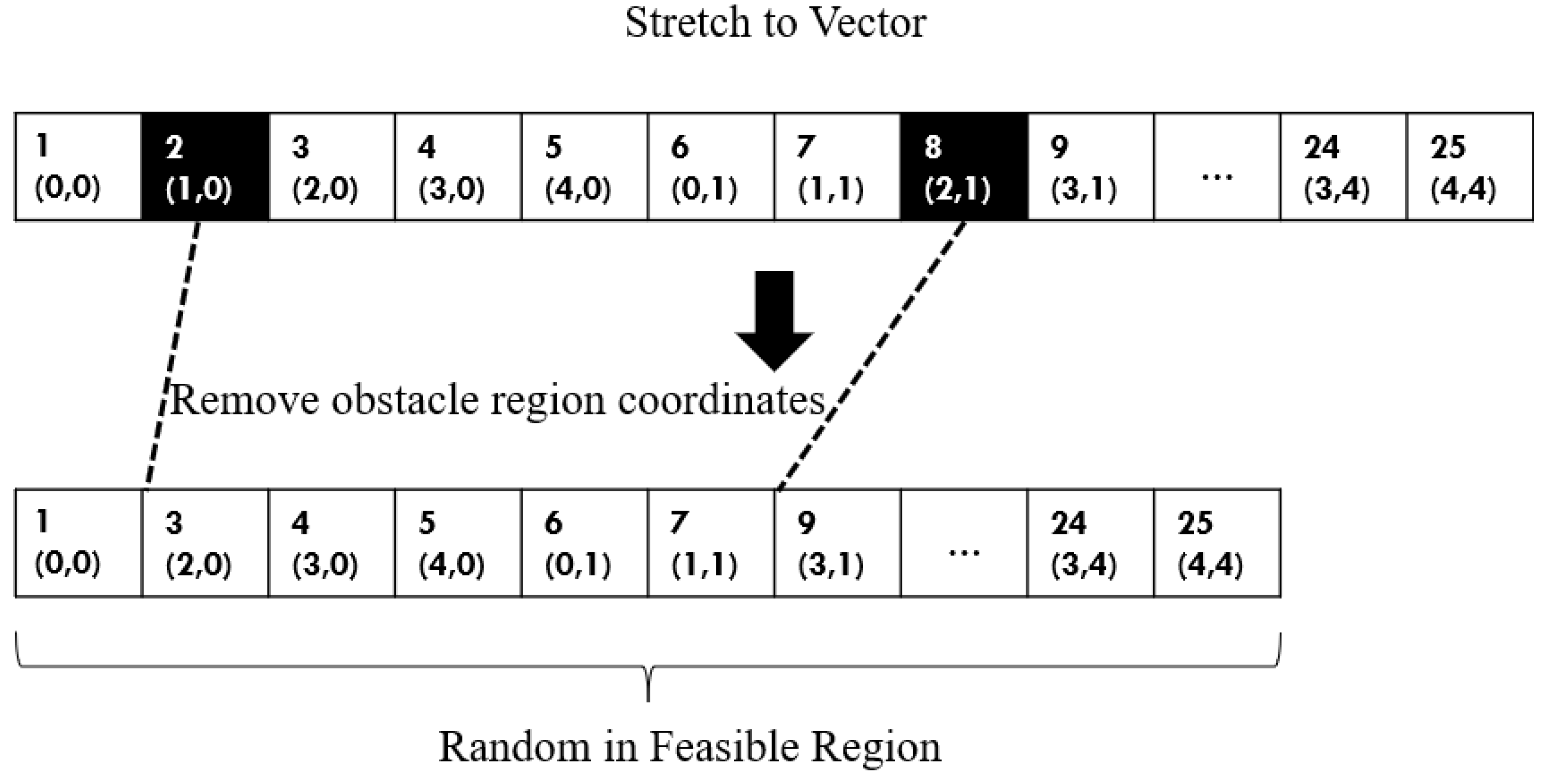
4.1. Unusable Nodes
4.2. Improved Algorithm
| Algorithm 2 Feasible region mapping for use in RRT*. |
|
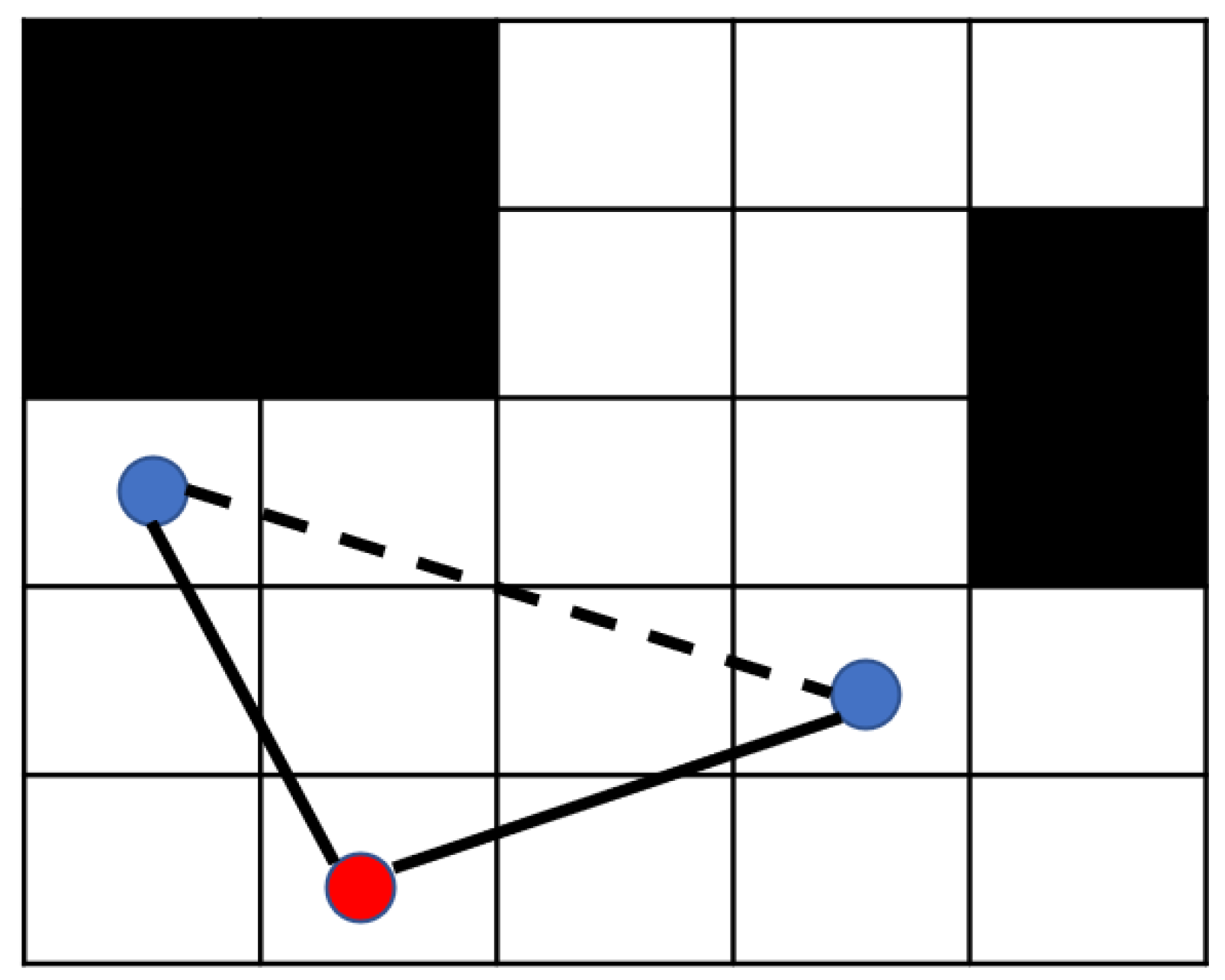
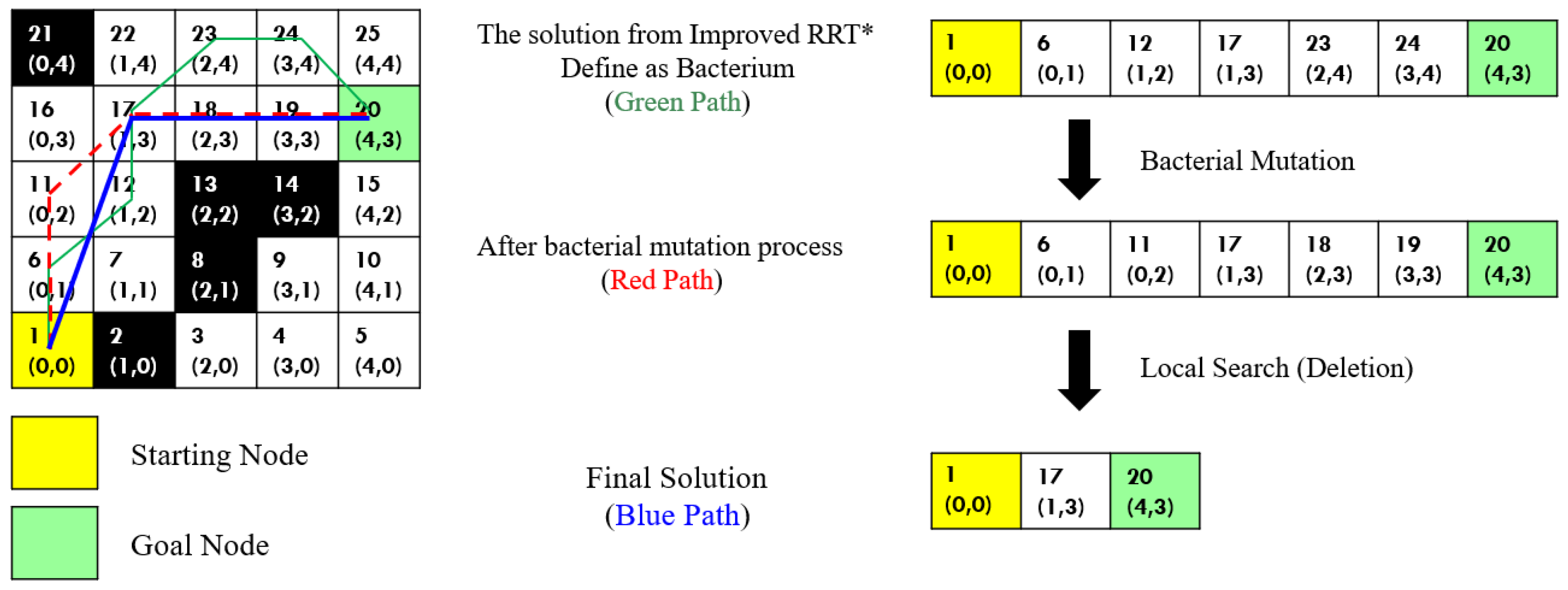
4.3. Post-Processing Algorithms
5. Experimental Results
5.1. Parameter Setting
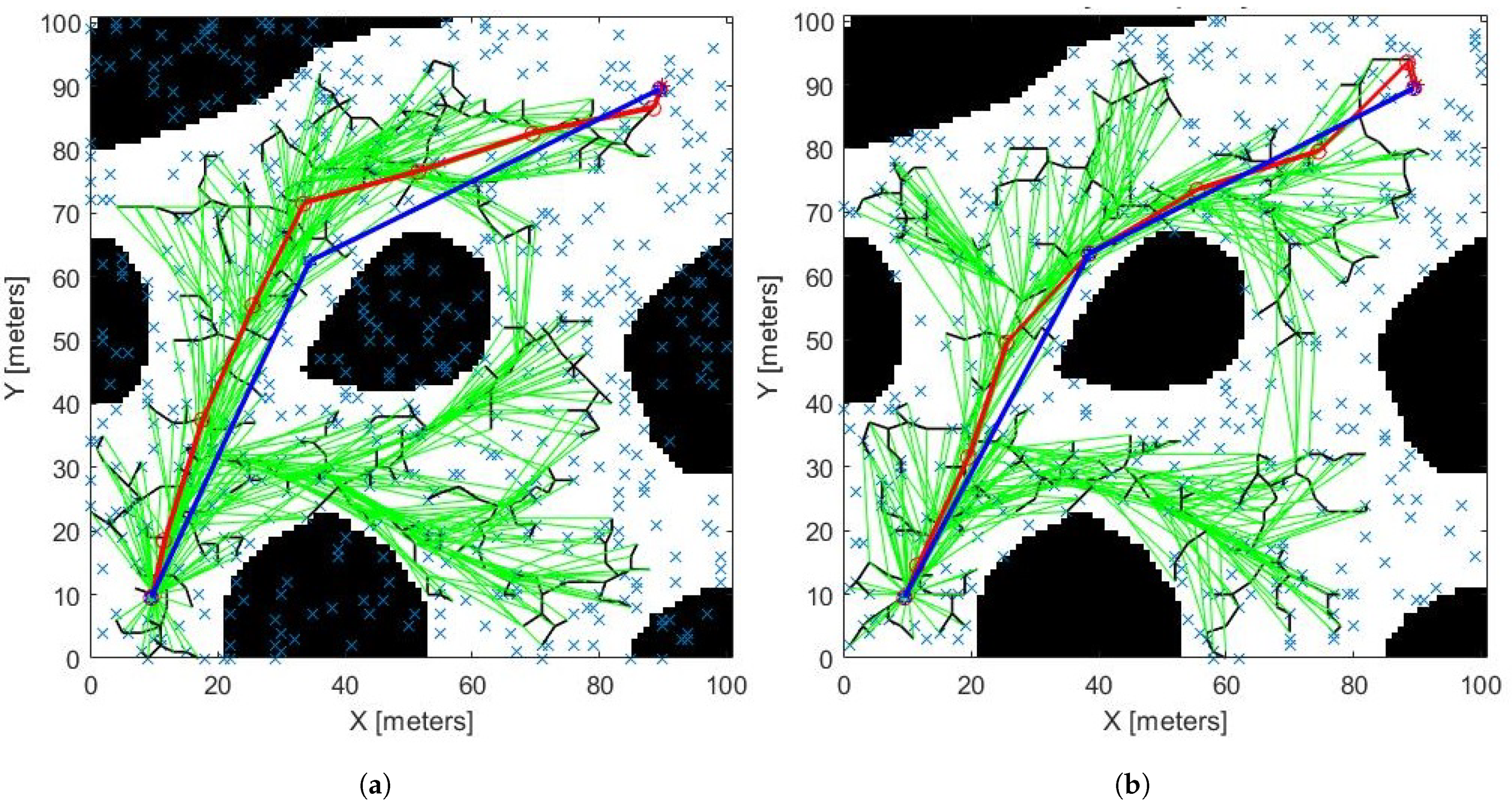
5.2. Results
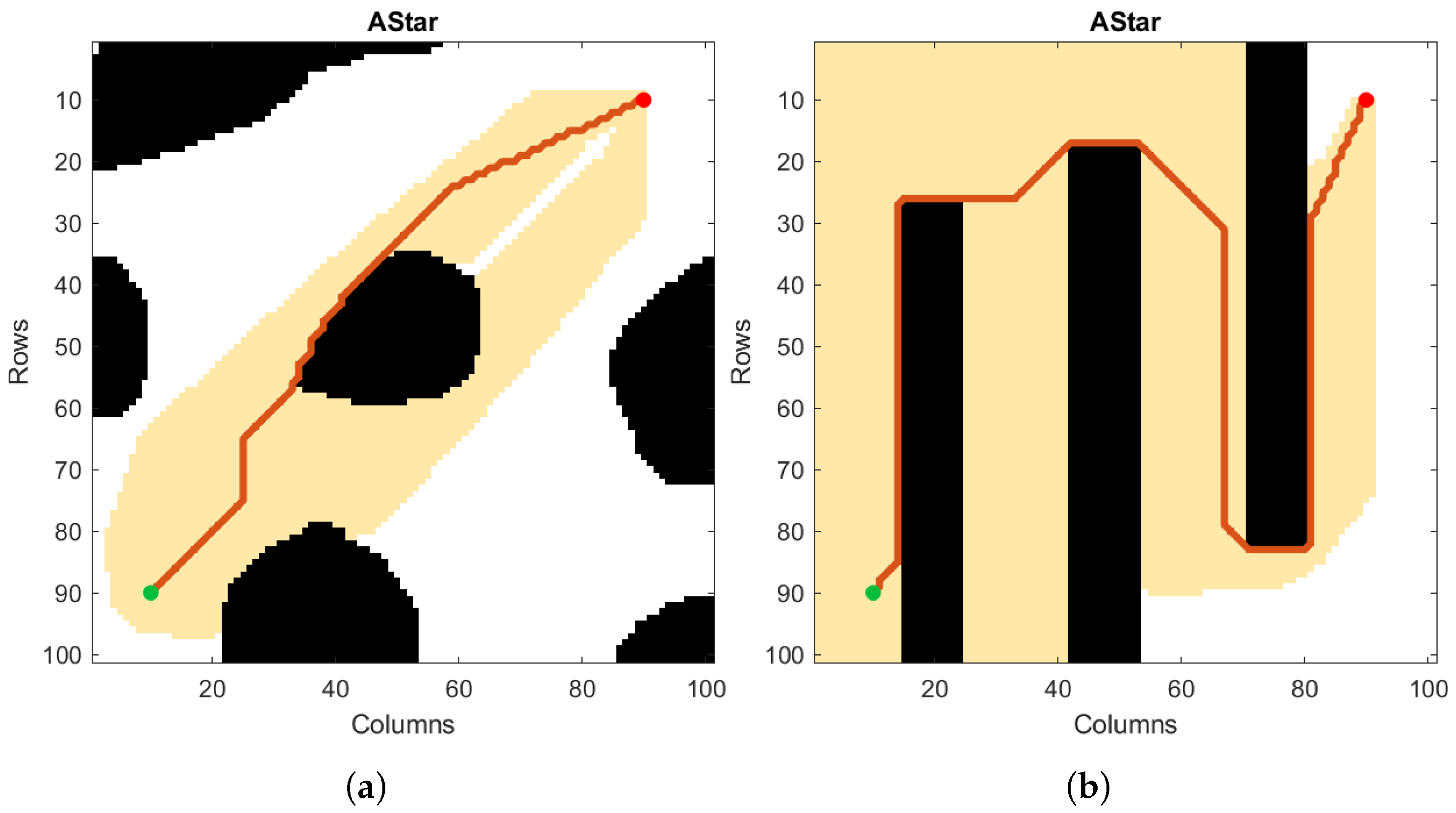
5.3. Comparing the Result with Commonly Used Algorithms
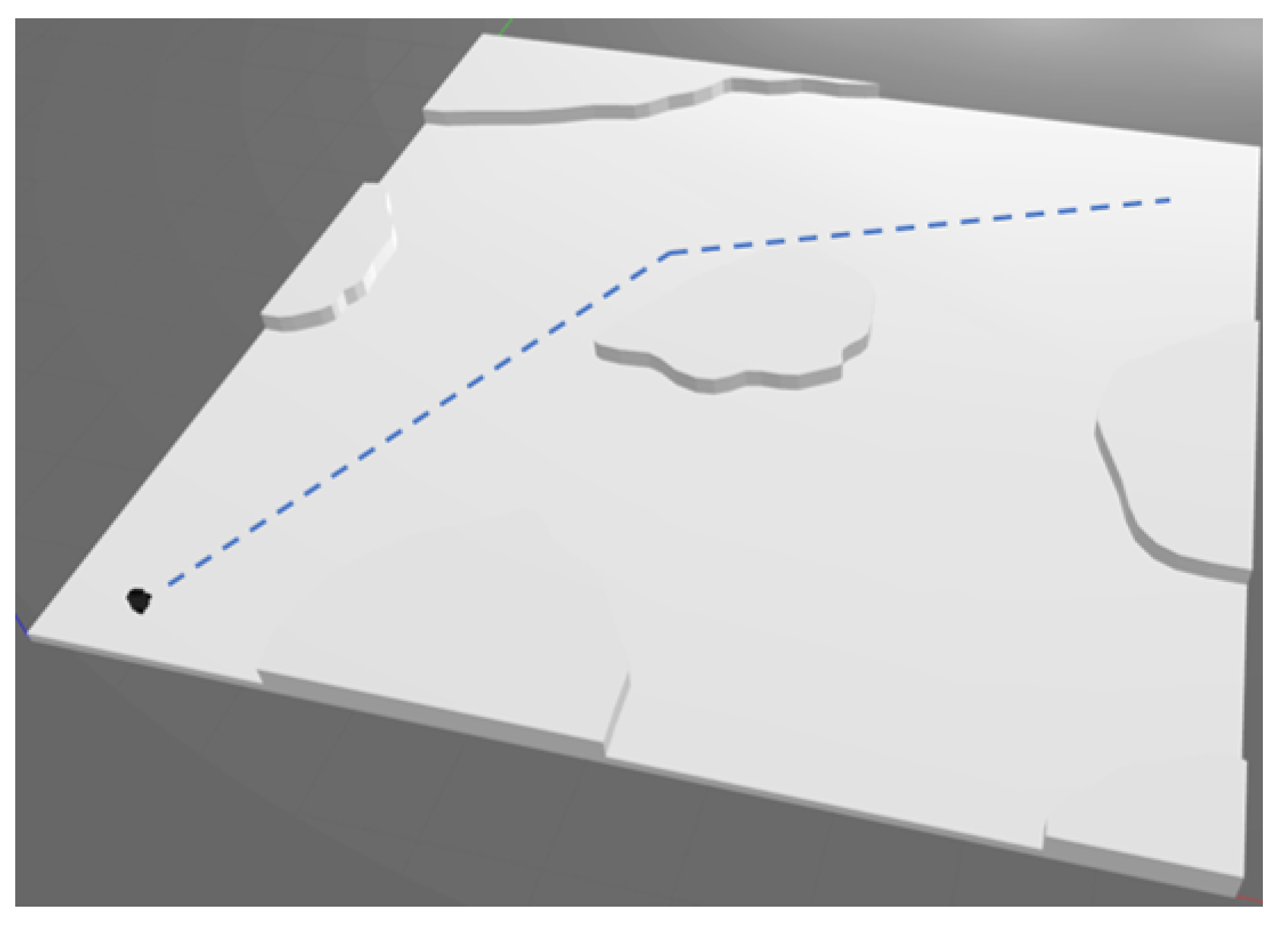
5.4. Simulation Result in Gazebo
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Botzheim, J. Cognitive Robotics. Electronics 2021, 10, 1510. [Google Scholar] [CrossRef]
- Gao, Y.; Hu, T.; Wang, Y.; Zhang, Y. Research on the Path Planning Algorithm of Mobile Robot. In Proceedings of the 2021 13th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Beihai, China, 16–17 January 2021; pp. 447–450. [Google Scholar] [CrossRef]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Zheyi, C.; Bing, X. AGV Path Planning Based on Improved Artificial Potential Field Method. In Proceedings of the 2021 IEEE International Conference on Power Electronics, Computer Applications (ICPECA), Shenyang, China, 22–24 January 2021; pp. 32–37. [Google Scholar] [CrossRef]
- Li, H. Robotic Path Planning Strategy Based on Improved Artificial Potential Field. In Proceedings of the 2020 International Conference on Artificial Intelligence and Computer Engineering (ICAICE), Beijing, China, 23–25 October 2020; pp. 67–71. [Google Scholar] [CrossRef]
- Ju, C.; Luo, Q.; Yan, X. Path Planning Using an Improved A-star Algorithm. In Proceedings of the 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), Jinan, China, 23–25 October 2020; pp. 23–26. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, P.; Zheng, C.; Tian, L.; Tian, Y. A Deep Reinforcement Learning Strategy Combining Expert Experience Guidance for a Fruit-Picking Manipulator. Electronics 2022, 11, 311. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Springer: London, UK, 1998. [Google Scholar]
- Karaman, S.; Frazzoli, E. Incremental Sampling-based Algorithms for Optimal Motion Planning. Robot. Sci. Syst. VI 2010, 104, 34–53. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based Algorithms for Optimal Motion Planning. Int. J. Robot. Res. IJRR 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Wang, H.; Li, G.; Hou, J.; Chen, L.; Hu, N. A Path Planning Method for Underground Intelligent Vehicles Based on an Improved RRT* Algorithm. Electronics 2022, 11, 294. [Google Scholar] [CrossRef]
- Yang, R.; Cai, P.; Wang, L. Comparison of Strategies for Optimizing Bi-RRT* on Mobile Robots. In Proceedings of the 2021 IEEE International Conference on Computer Science, Artificial Intelligence and Electronic Engineering (CSAIEE), Virtual, SC, USA, 20–22 August 2021; pp. 328–334. [Google Scholar] [CrossRef]
- Ghosh, D.; Nandakumar, G.; Narayanan, K.; Honkote, V.; Sharma, S. Kinematic Constraints Based Bi-directional RRT (KB-RRT) with Parameterized Trajectories for Robot Path Planning in Cluttered Environment. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8627–8633. [Google Scholar] [CrossRef]
- Wu, X.; Xu, L.; Zhen, R.; Wu, X. Biased Sampling Potentially Guided Intelligent Bidirectional RRT* Algorithm for UAV Path Planning in 3D Environment. Math. Probl. Eng. 2019, 2019, 5157403. [Google Scholar] [CrossRef] [Green Version]
- Živojević, D.; Velagić, J. Path Planning for Mobile Robot using Dubins-curve based RRT Algorithm with Differential Constraints. In Proceedings of the 2019 International Symposium ELMAR, Zadar, Croatia, 23–25 September 2019; pp. 139–142. [Google Scholar] [CrossRef]
- Varghese, A.M.; Jisha, V.R. Motion Planning and Control of an Autonomous Mobile Robot. In Proceedings of the 2018 International CET Conference on Control, Communication, and Computing (IC4), Thiruvananthapuram, India, 5–7 July 2018; pp. 17–21. [Google Scholar] [CrossRef]
- Qi, J.; Yang, H.; Sun, H. MOD-RRT*: A Sampling-Based Algorithm for Robot Path Planning in Dynamic Environment. IEEE Trans. Ind. Electron. 2021, 68, 7244–7251. [Google Scholar] [CrossRef]
- Liu, G.; Jiang, Y. Research on Dynamic Trajectory Planning of Collaborative Robots Base on RRT-RV Algorithm. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 14–16 December 2018; pp. 1020–1023. [Google Scholar] [CrossRef]
- Li, S.; Zhao, D.; Sun, Y.; Yang, J.; Wang, S. Path Planning Algorithm Based on the Improved RRT-Connect for Home Service Robot Arms. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 403–407. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S.; Kadry, S.; Nam, Y. Control Framework for Trajectory Planning of Soft Manipulator Using Optimized RRT Algorithm. IEEE Access 2020, 8, 171730–171743. [Google Scholar] [CrossRef]
- Wang, Z.; Chang, J.; Li, B.; Wang, C.; Liu, C. Application of Improved Rapidly-exploring Random Trees (RRT) algorithm for Obstacle Avoidance of Snake-like Manipulator. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 490–495. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, Y.; Yao, X. An Improved Path Planning Algorithm for Unmanned Aerial Vehicle Based on RRT-Connect. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4854–4858. [Google Scholar] [CrossRef]
- Chen, J.; Yu, J. An Improved Path Planning Algorithm for UAV Based on RRT. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 895–898. [Google Scholar] [CrossRef]
- Yafei, L.; Anping, W.; Qingyang, C.; Yujie, W. An Improved UAV Path Planning method Based on RRT-APF Hybrid strategy. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 19–20 September 2020; pp. 81–86. [Google Scholar] [CrossRef]
- Xue, Y.; Zhang, X.; Jia, S.; Sun, Y.; Diao, C. Hybrid bidirectional rapidly-exploring random trees algorithm with heuristic target graviton. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 4357–4361. [Google Scholar] [CrossRef]
- Khanmohammadi, S.; Mahdizadeh, A. Density Avoided Sampling: An Intelligent Sampling Technique for Rapidly-Exploring Random Trees. In Proceedings of the 2008 Eighth International Conference on Hybrid Intelligent Systems, Barcelona, Spain, 10–12 September 2008; pp. 672–677. [Google Scholar] [CrossRef]
- Nawa, N.E.; Furuhashi, T. Fuzzy system parameters discovery by bacterial evolutionary algorithm. IEEE Trans. Fuzzy Syst. 1999, 7, 608–616. [Google Scholar] [CrossRef]
- Qing, L.; Chao, Z.; Yinmei, X.; Yixin, Y. Path planning of mobile robots based on specialized genetic algorithm and improved particle swarm optimization. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 7204–7209. [Google Scholar]
- Gou, P.; Jiang, B. Research on Path planning of Three-Dimensional UAV Based on Levy Flight Strategy and Improved Particle Swarm Optimization Algorithm. In Proceedings of the 2020 7th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 18–20 December 2020; pp. 1199–1203. [Google Scholar] [CrossRef]
- Praserttaweelap, R.; Kiatwanidvilai, S. Optimal A* Path Planning with Ant Colony Optimization on Multi-Robot Task Allocation for Manufacturing Model. In Proceedings of the 2021 IEEE 8th International Conference on Industrial Engineering and Applications (ICIEA), Chengdu, China, 23–26 April 2021; pp. 137–141. [Google Scholar] [CrossRef]
- Lee, M.; Yu, K. Dynamic Path Planning Based on an Improved Ant Colony Optimization with Genetic Algorithm. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP), Auckland, New Zealand, 5–8 August 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Botzheim, J.; Cabrita, C.; Kóczy, L.T.; Ruano, A.E. Fuzzy rule extraction by bacterial memetic algorithms. Int. J. Intell. Syst. 2009, 24, 312–339. [Google Scholar] [CrossRef]
- Botzheim, J.; Toda, Y.; Kubota, N. Bacterial memetic algorithm for offline path planning of mobile robots. Memetic Comput. 2012, 4, 73–86. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Value |
|---|---|---|
| RRT* | Maximum Iteration | 5000 |
| Map Size () | ||
| Steering Distance (B) | 3 | |
| Optimized Radius (R) | 20 | |
| Bacterial Mutation | 5 | |
| Number of Generations | Size of Bacterium | |
| Penalty | 1000 | |
| S | 0.1 | |
| Deletion | Iteration | Size of Bacterium |
| Result | Traditional RRT* | Traditional RRT* with BM and ND | Proposed RRT* with BM and ND |
|---|---|---|---|
| Simple Environment | |||
| Number of Iterations | 609 | 609 | 353 |
| Path Length | 127 | 120 | 120 |
| Number of Unusable Nodes | 183 | 183 | 35 |
| Computation Time (s) | 1.701 | 2.520 | 1.808 |
| Number of Result Nodes | 9 | 3 | 3 |
| Complex Environment | |||
| Number of Iterations | 2791 | 2791 | 1816 |
| Path Length | 284 | 274 | 266 |
| Number of Unusable Nodes | 1411 | 1411 | 659 |
| Computation Time (s) | 13.382 | 16.152 | 12.093 |
| Number of Result Nodes | 16 | 7 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lonklang, A.; Botzheim, J. Improved Rapidly Exploring Random Tree with Bacterial Mutation and Node Deletion for Offline Path Planning of Mobile Robot. Electronics 2022, 11, 1459. https://doi.org/10.3390/electronics11091459
Lonklang A, Botzheim J. Improved Rapidly Exploring Random Tree with Bacterial Mutation and Node Deletion for Offline Path Planning of Mobile Robot. Electronics. 2022; 11(9):1459. https://doi.org/10.3390/electronics11091459
Chicago/Turabian StyleLonklang, Aphilak, and János Botzheim. 2022. "Improved Rapidly Exploring Random Tree with Bacterial Mutation and Node Deletion for Offline Path Planning of Mobile Robot" Electronics 11, no. 9: 1459. https://doi.org/10.3390/electronics11091459
APA StyleLonklang, A., & Botzheim, J. (2022). Improved Rapidly Exploring Random Tree with Bacterial Mutation and Node Deletion for Offline Path Planning of Mobile Robot. Electronics, 11(9), 1459. https://doi.org/10.3390/electronics11091459