
Research on Coded Excitation Using Kasami Sequence in the Long Rail Detection Based on UGW


Abstract
:1. Introduction
2. Materials and Methods
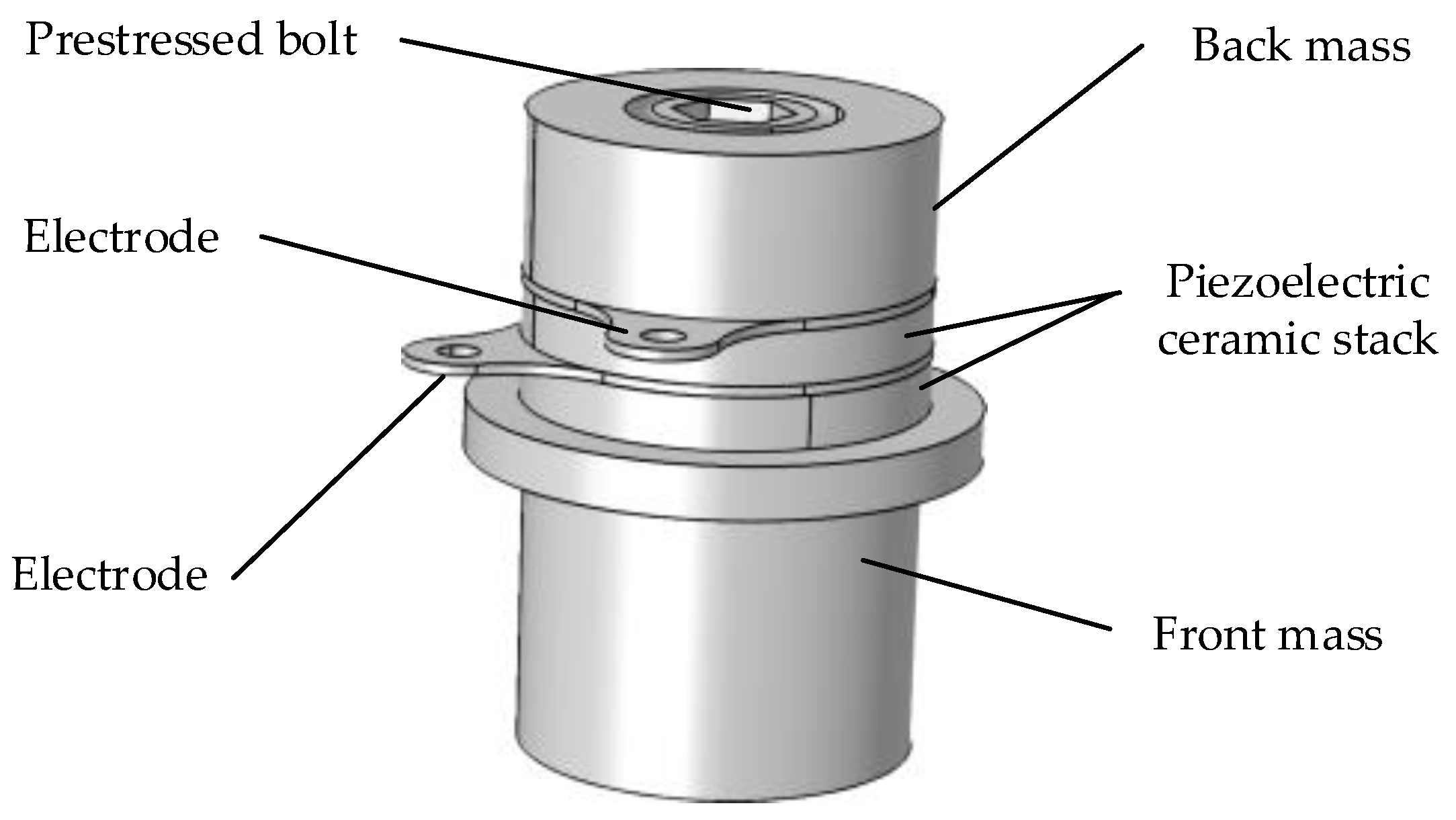
2.1. PSpice Model of SPUT in Longitudinal Vibration
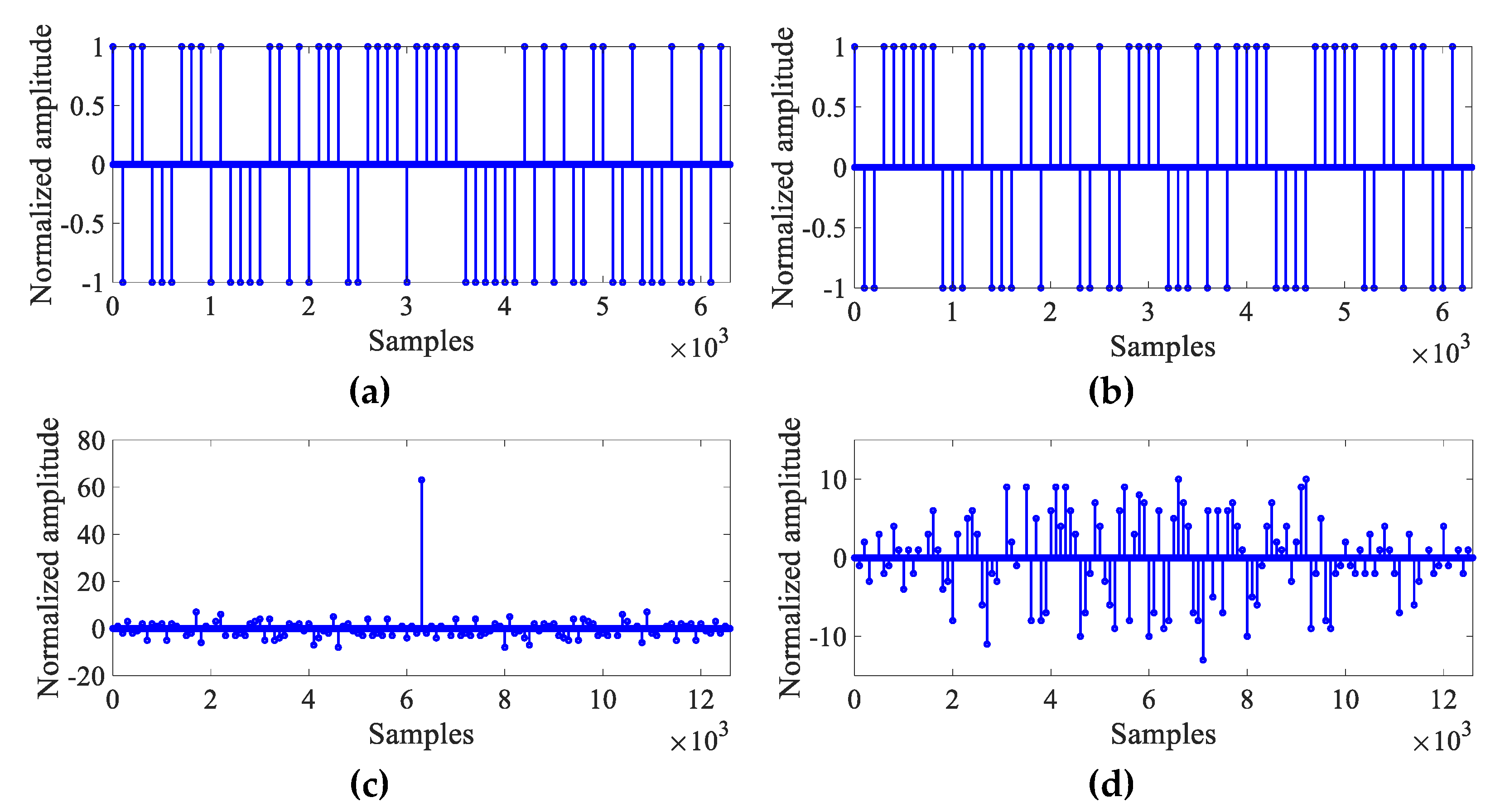
2.2. Scheme of Kasami Sequences Encoding and Decoding
3. Results
3.1. Analysis of Encoding Excitation by Kasami Sequences
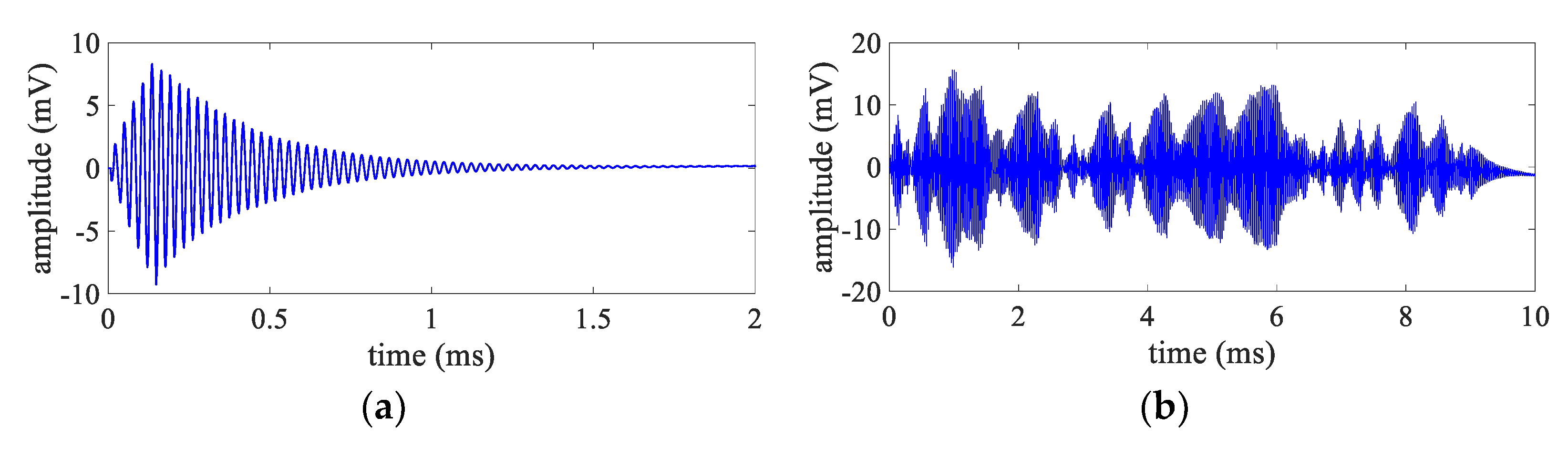
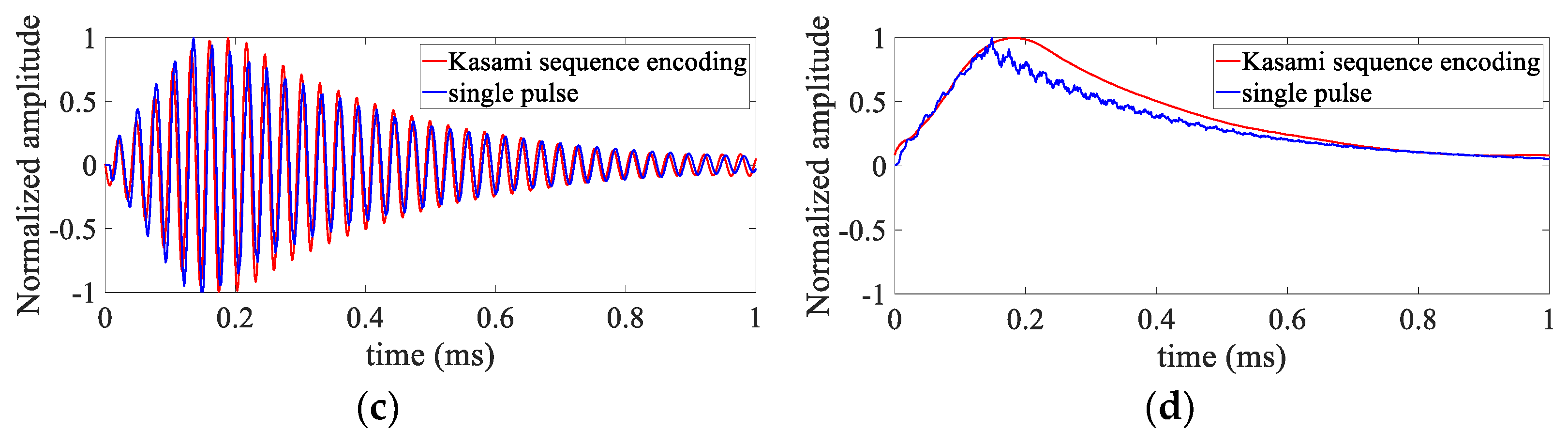
3.1.1. Comparison Analysis of Single Pulse and Encoding Excitation
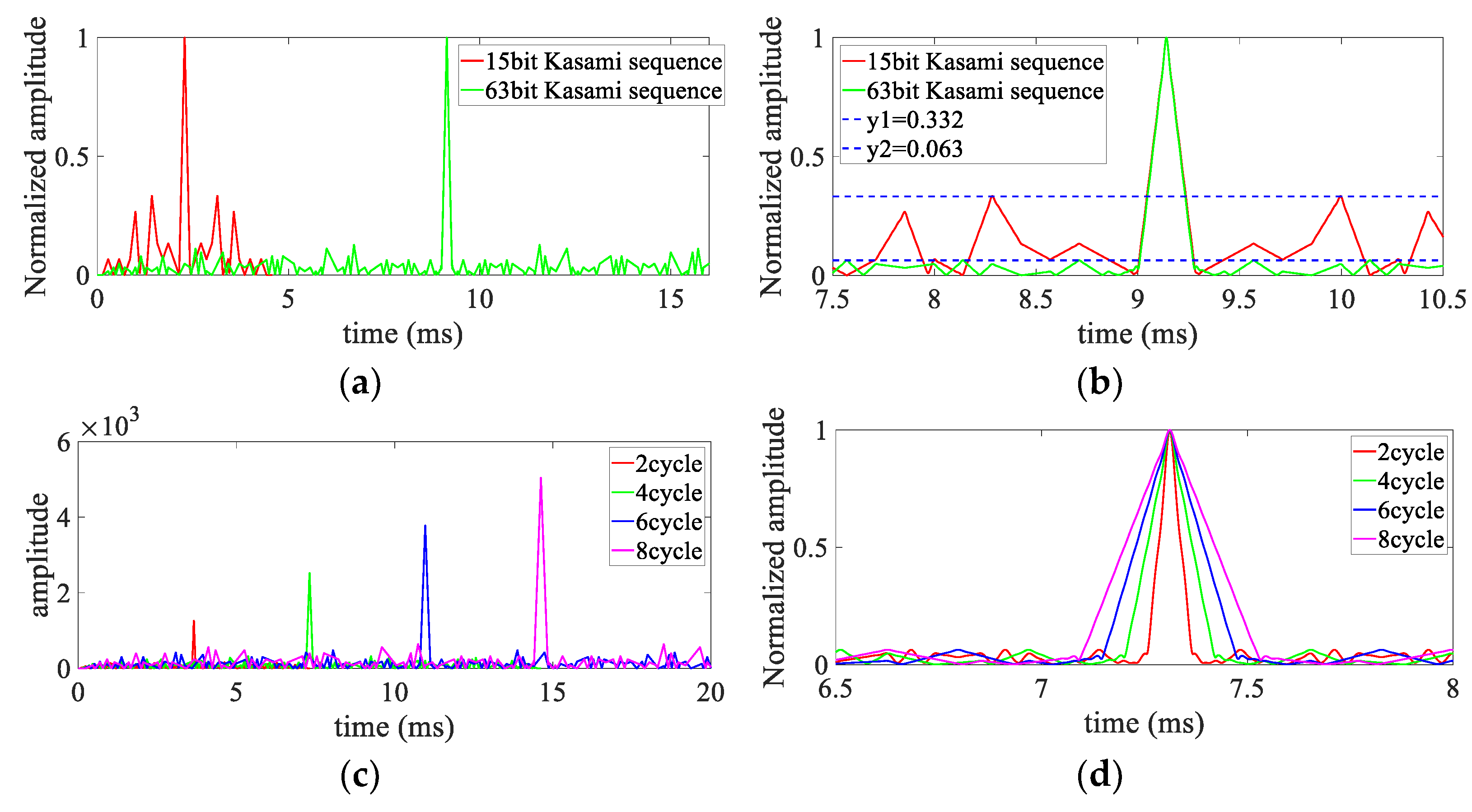
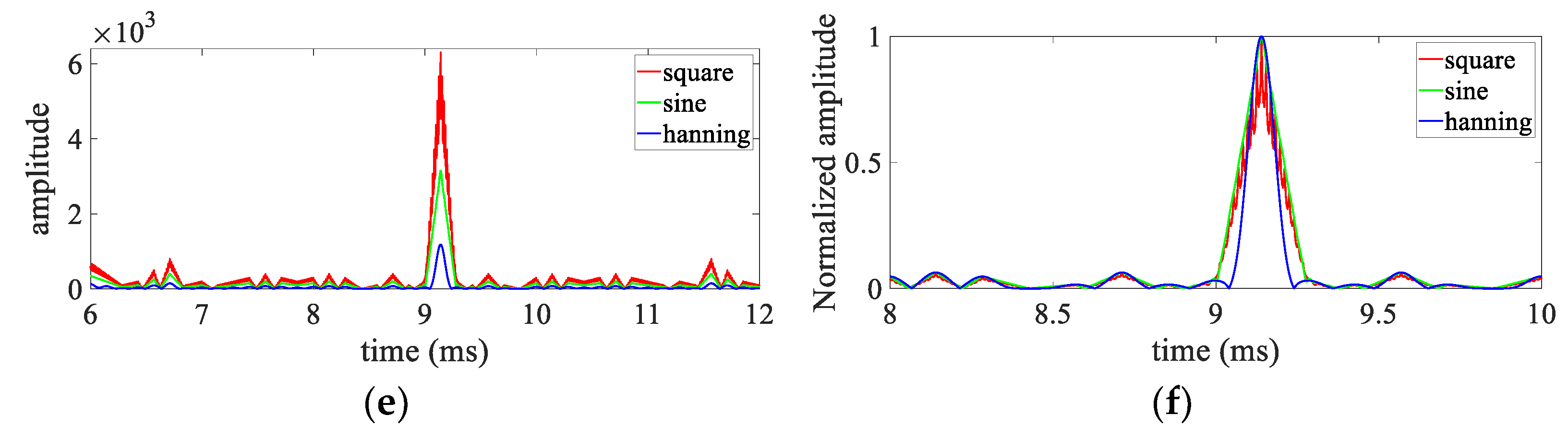
3.1.2. The Effect of Carrier Signals and Bits of Kasami Sequences on Encoding Excitation
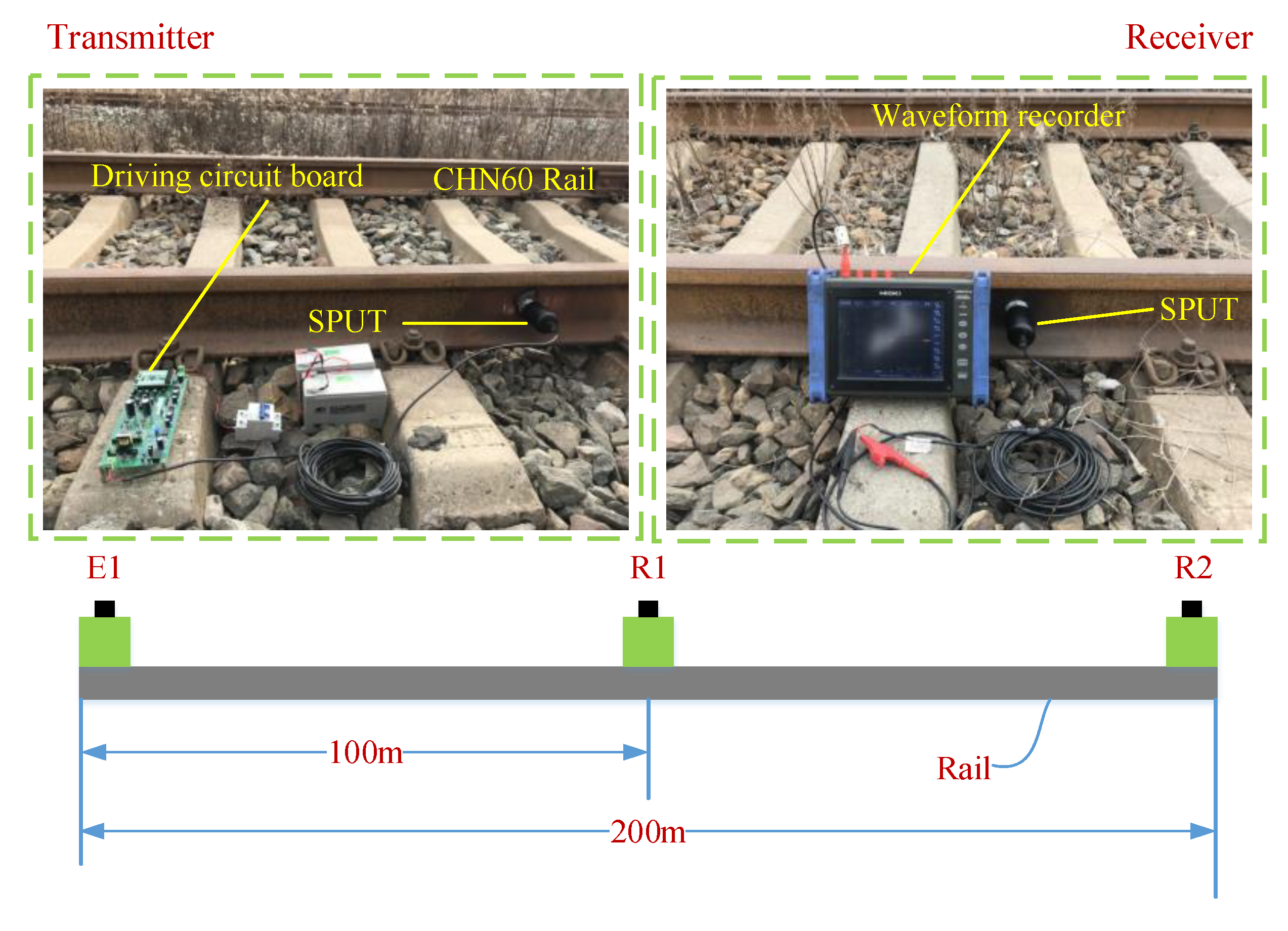
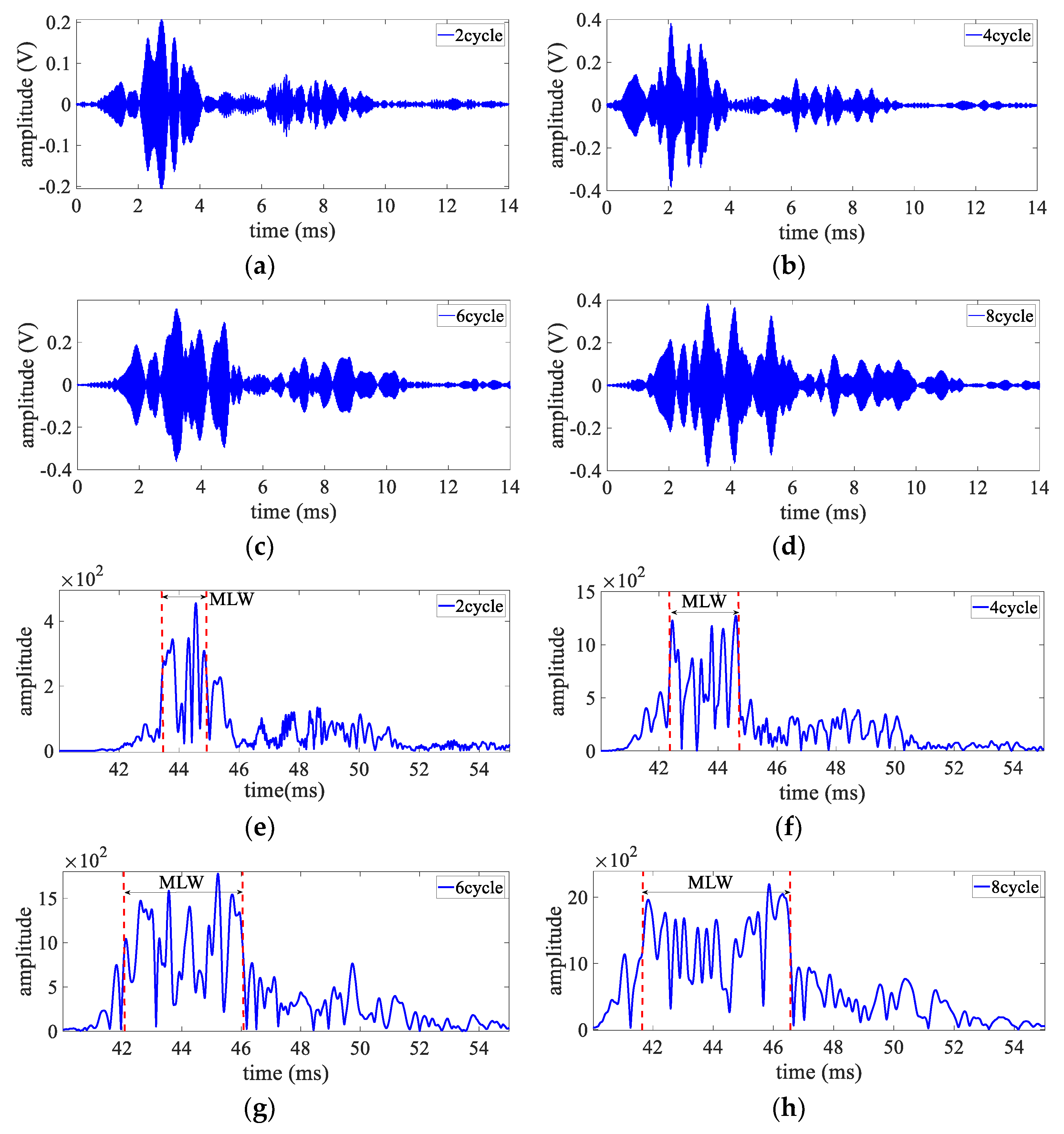
3.1.3. Field Test of Kasami Sequences on Encoding Excitation
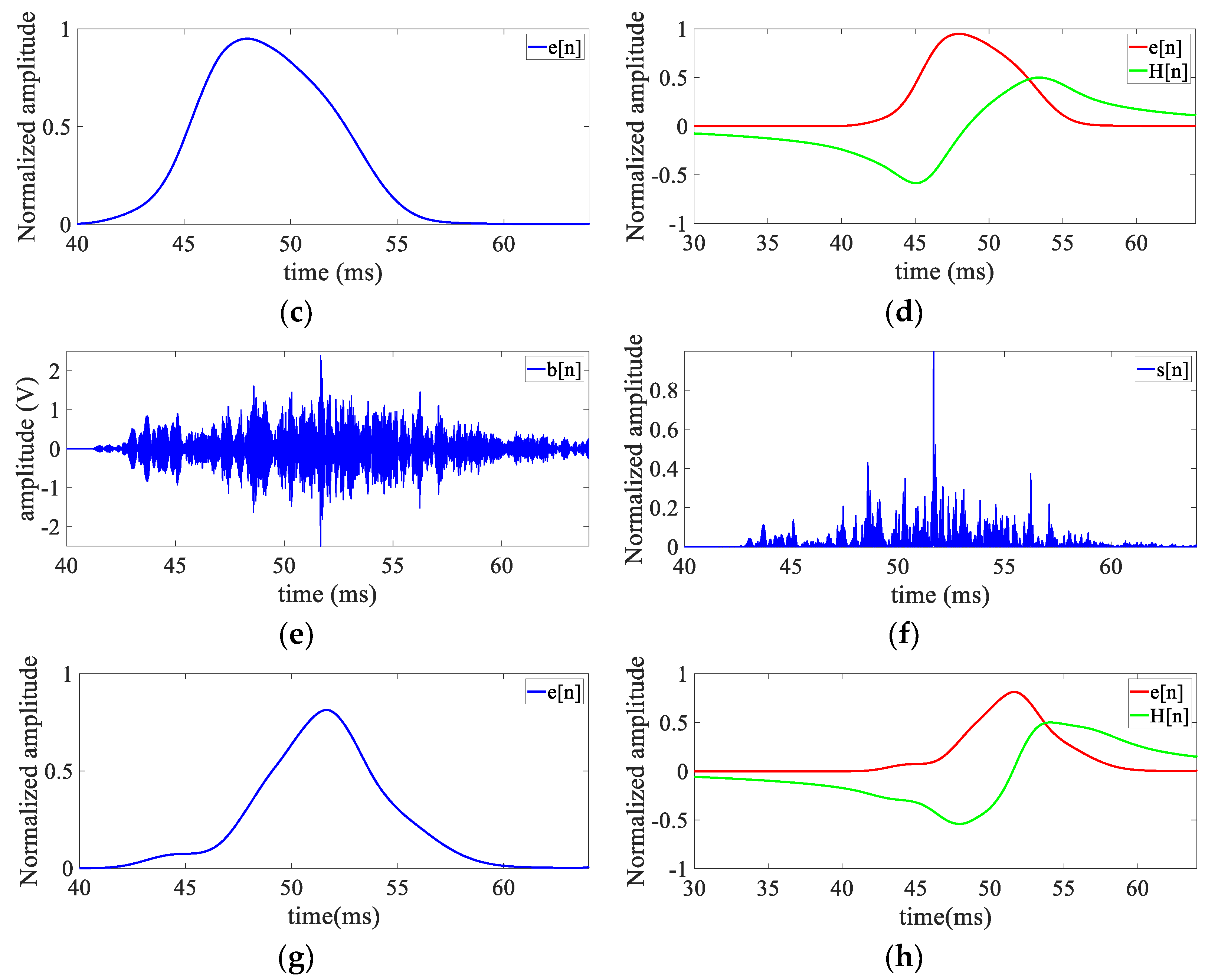
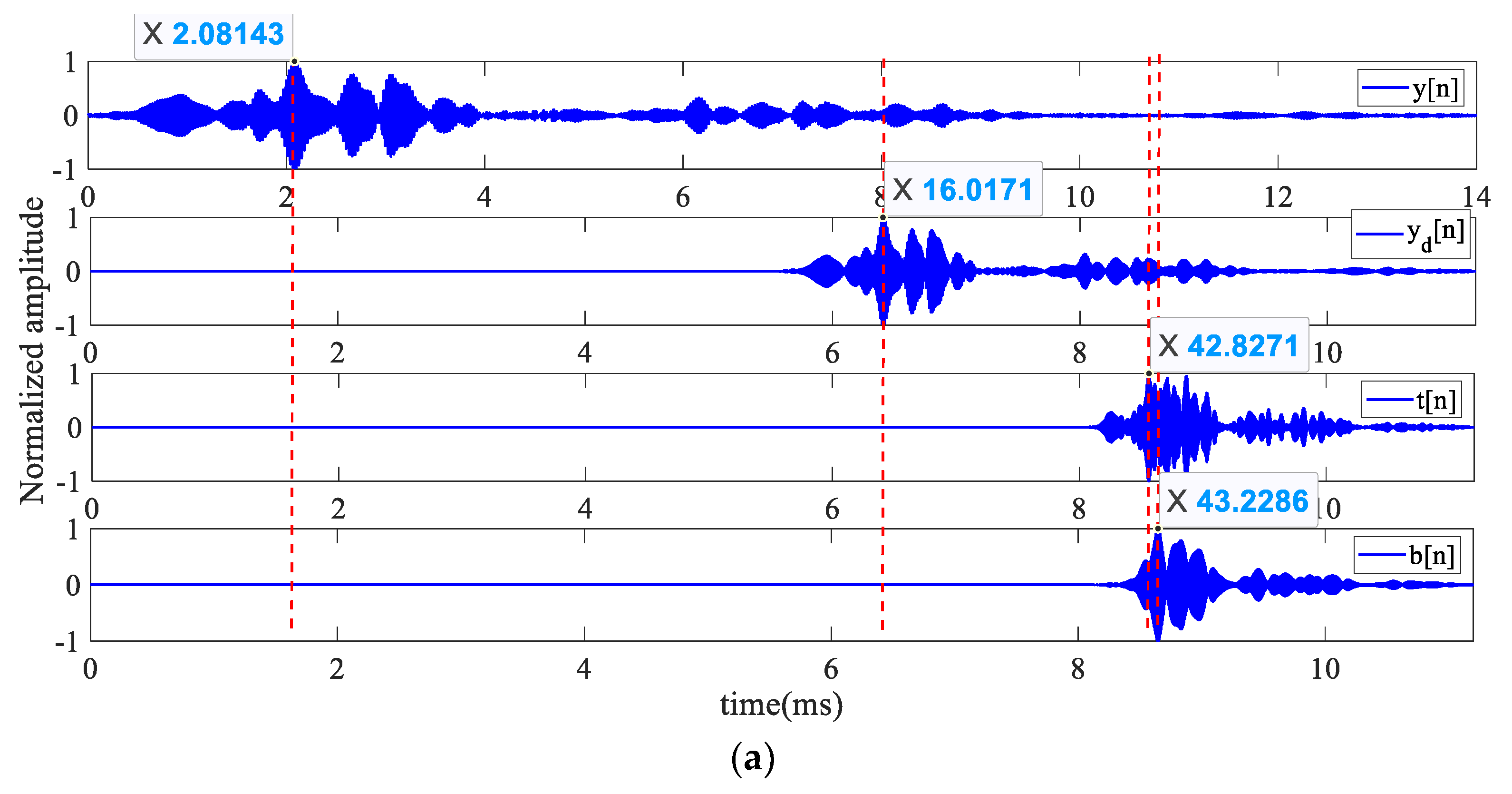
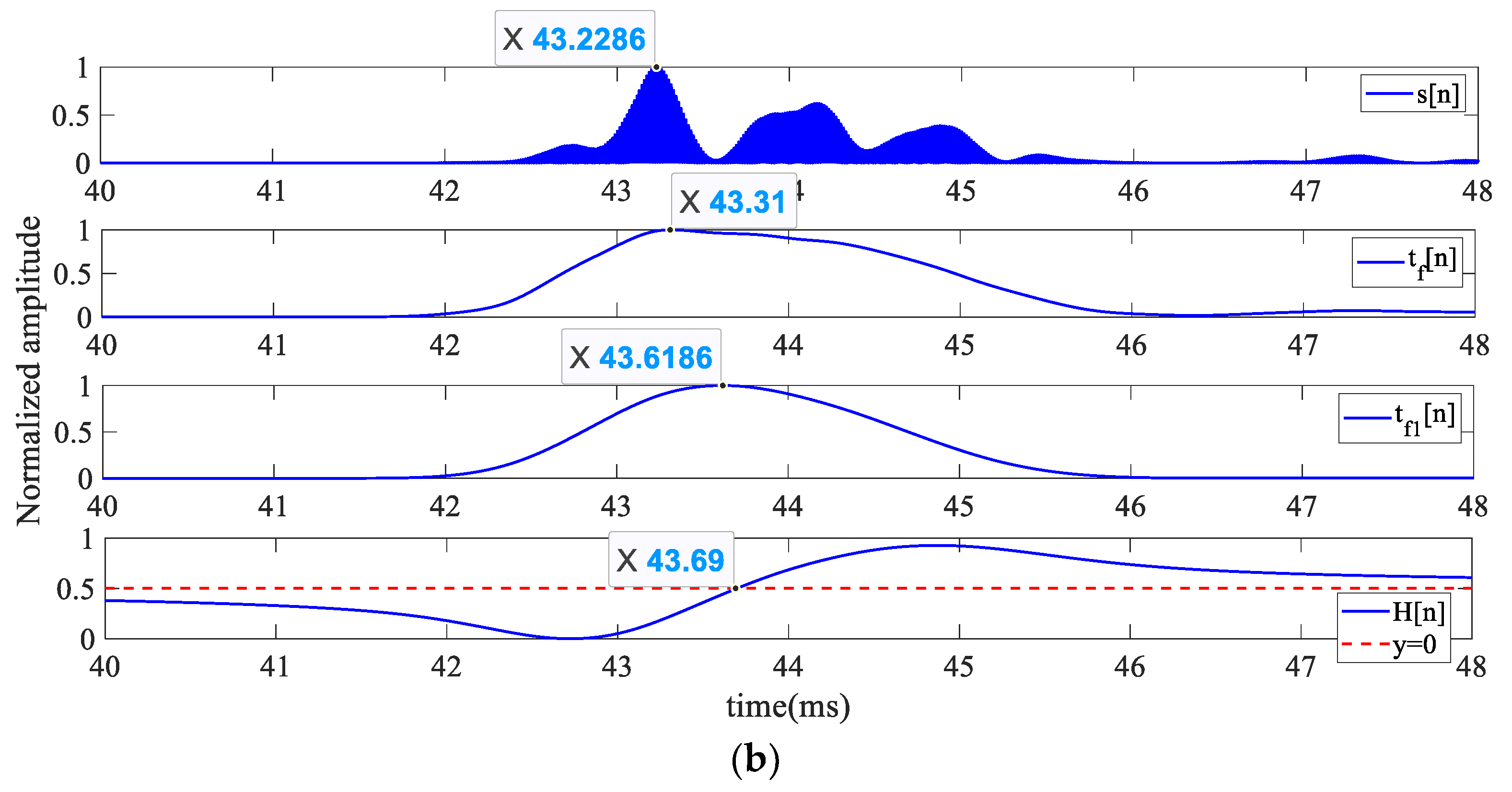
3.2. Peaks Detection
4. Discussion
5. Conclusions
- (1)
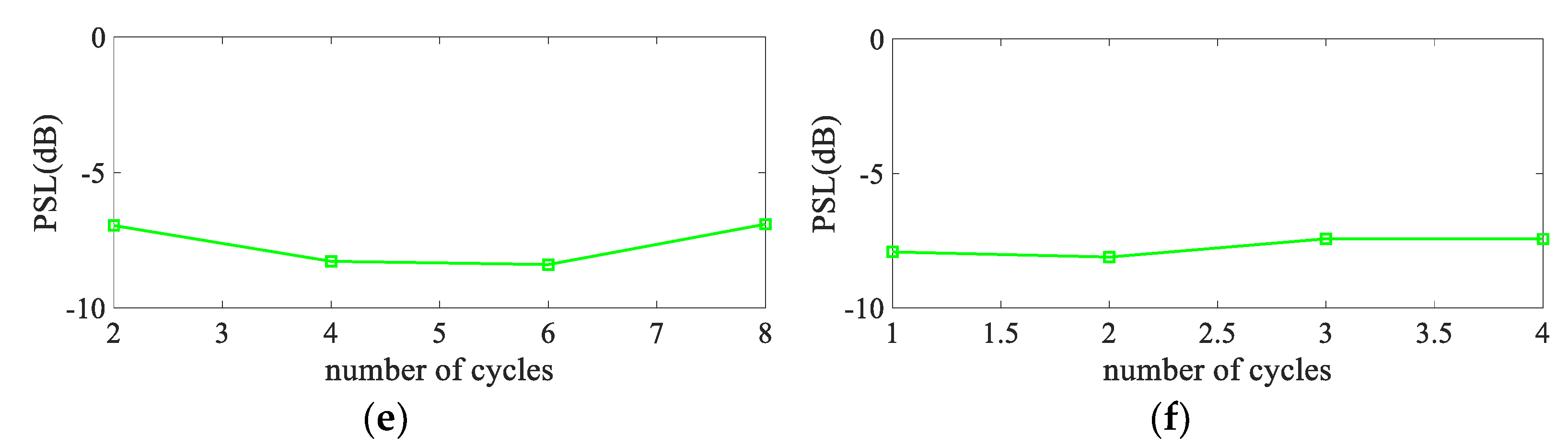
- It is shown that Kasami sequence-coded UGW signals can efficiently increase the SNRG (the gain of SNR) by 6.29 dB and have a strong anti-noise performance. As the number of carrier cycles increases, the main lobe width of the decoded signal envelope gradually widens and amplitude increases. Generally, the main lobe width is mainly determined by the number of carrier cycles and the carrier waveform, and the size of the side lobes is mainly determined by the number of coding bits.
- (2)
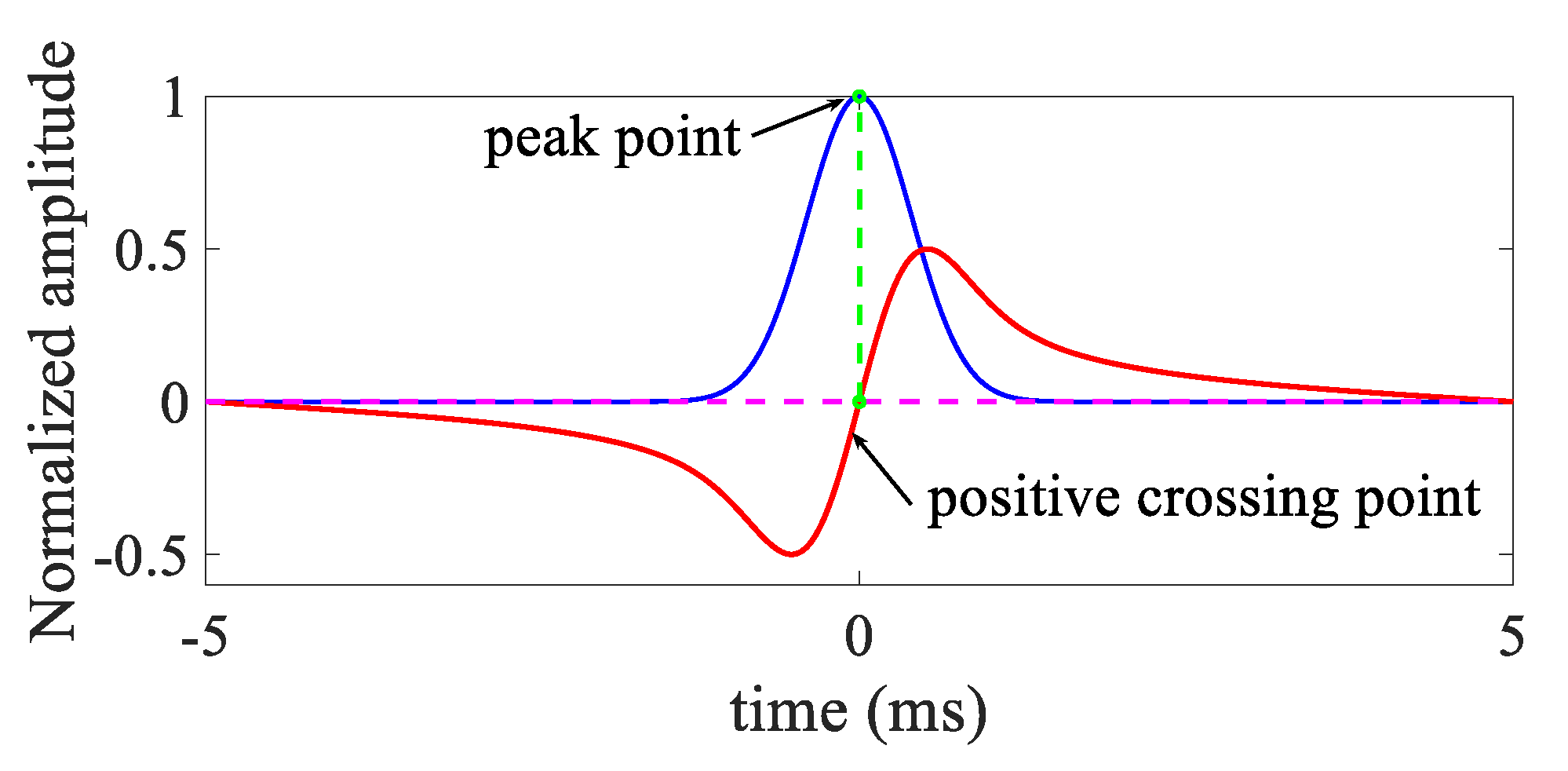
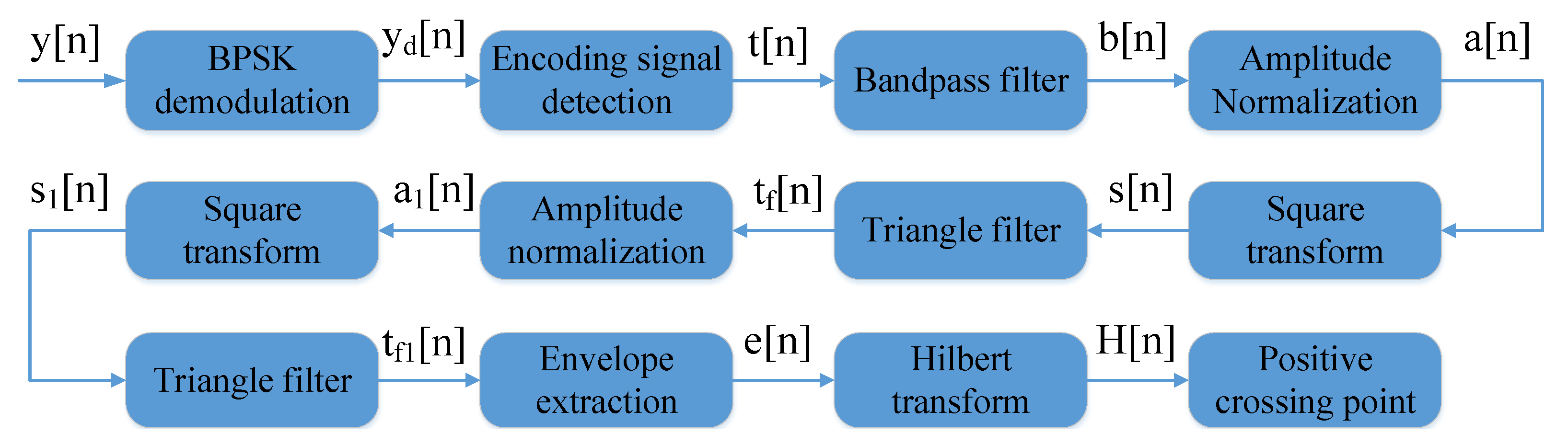
- It is found that the presented adaptive peak detection algorithm has strong robustness and immunity to noise. The presented method is easy to accomplish by programming and to integrate into a real-time detection system. To improve defect positioning accuracy, the time shift resulting from bandpass filtering, triangle filtering and Hilbert transform should be small as soon as possible.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, J.; Lu, Y.; Guan, R.; Qu, W. Guided waves for debonding identification in CFRP-reinforced concrete beams. Constr. Build. Mater. 2017, 131, 388–399. [Google Scholar] [CrossRef]
- Ostachowicz, W.; Kudela, P.; Krawczuk, M.; Zak, A. Guided Waves in Structures for SHM: The Time - Domain Spectral Element Method; John Wiley & Sons, Ltd.: New York, NY, USA, 2012. [Google Scholar]
- Miniaci, M.; Mazzotti, M.; Radzieński, M.; Kudela, P.; Kherraz, N.; Bosia, F.; Pugno, N.M.; Ostachowicz, W. Application of a Laser-Based Time Reversal Algorithm for Impact Localization in a Stiffened Aluminum Plate. Front. Mater. 2019, 6, 30. [Google Scholar] [CrossRef]
- Meo, M.; Polimeno, U.; Zumpano, G. Detecting damage in composite material using nonlinear elastic wave spectroscopy methods. Appl. Compos. Mater. 2008, 15, 115–126. [Google Scholar] [CrossRef]
- Ulrich, T.J.; Johnson, P.A.; Guyer, R.A. Interaction dynamics of elastic waves with a complex nonlinear scatterer through the use of a time reversal mirror. Phys. Rev. Lett. 2007, 98, 104301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Setshedi, I.I.; Loveday, P.W.; Long, C.S.; Wilke, D.N. Estimation of rail properties using semi-analytical finite element models and guided wave ultrasound measurements. Ultrasonics 2019, 96, 240–252. [Google Scholar] [CrossRef] [PubMed]
- Hu, S.; Shi, W.; Lu, C.; Chen, Y.; Chen, G.; Shen, G. Rapid detection of cracks in the rail foot by ultrasonic b-scan imaging using a shear horizontal guided wave electromagnetic acoustic transducer. NDT E Int. 2021, 120, 102437. [Google Scholar] [CrossRef]
- Bombarda, D.; Vitetta, G.M.; Ferrante, G. Rail diagnostics based on ultrasonic guided waves: An overview. Appl. Sci. 2021, 11, 1071. [Google Scholar] [CrossRef]
- Deng, F.; Li, S.-Q.; Zhang, X.-R.; Zhao, L.; Huang, J.-B.; Zhou, C. An Intelligence Method for Recognizing Multiple Defects in Rail. Sensors 2021, 21, 8108. [Google Scholar] [CrossRef]
- Wang, J.-D.; Jiang, J.-J.; Duan, F.-J.; Cheng, S.-Y.; Peng, C.-X.; Liu, W.; Qu, X.-H. A high-tolerance matching method against load fluctuation for ultrasonic transducers. IEEE Trans. Power Electron. 2020, 35, 1147–1155. [Google Scholar] [CrossRef]
- Wang, J.-D.; Jiang, J.-J.; Duan, F.-J.; Zhang, F.-M.; Liu, W.; Qu, X.-H. A novel fast resonance frequency tracking method based on the admittance circle for ultrasonic transducers. IEEE Trans. Ind. Electron. 2019, 67, 6864–6873. [Google Scholar] [CrossRef]
- Wei, X.; Yang, Y.; Yao, W.; Zhang, L. Design of full bridge high voltage pulser for sandwiched piezoelectric ultrasonic transducers used in long rail detection. Appl. Acoust. 2019, 149, 15–24. [Google Scholar] [CrossRef]
- Miniaci, M.; Gliozzi, A.S.; Morvan, B.; Krushynska, A.; Bosia, F.; Scalerandi, M.; Pugno, N.M. Proof of Concept for an Ultrasensitive Technique to Detect and Localize Sources of Elastic Nonlinearity Using Phononic Crystals. Phys. Rev. Lett. 2017, 118, 214301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ciampa, F.; Mankar, A.; Marini, A. Phononic Crystal Waveguide Transducers for Nonlinear Elastic Wave Sensing. Sci. Rep. 2017, 7, 115–126. [Google Scholar]
- Xu, C.; Yang, Z.; Chen, X.; Tian, S.; Xie, Y. A guided wave dispersion compensation method based on compressed sensing. Mech. Syst. Signal Process. 2018, 103, 89–104. [Google Scholar] [CrossRef]
- De Marchi, L.; Marzani, A.; Miniaci, M. A dispersion compensation procedure to extend pulse-echo defects location to irregular waveguides. NDT E Int. 2013, 54, 115–122. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, Z.; Zhang, W.; Meng, G. Parameterised time-frequency analysis methods and their engineering applications: A review of recent advances. Mech. Syst. Signal Process. 2019, 119, 182–221. [Google Scholar] [CrossRef]
- Fan, Z.; Rudlin, J.; Asfis, G.; Meng, H. Convolution of Barker and Golay Codes for Low Voltage Ultrasonic Testing. Technologies 2019, 7, 72. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Gang, W.; Huang, Q.; Ji, F.; Feng, Y. Barker coded excitation with linear frequency modulated carrier for ultrasonic imaging. Biomed. Signal Process. Control 2014, 13, 306–312. [Google Scholar] [CrossRef]
- Yucel, M.; Fateri, S.; Legg, M.; Wilkinson, A.; Kappatos, V.; Selcuk, C.; Gan, T.-H. Coded waveform excitation for high-resolution ultrasonic guided wave response. IEEE Trans. Ind. Inform. 2016, 12, 257–266. [Google Scholar] [CrossRef]
- Wei, X.; Yang, Y.; Ureña, J.; Yan, J.; Wang, H. An adaptive peak detection method for inspection of breakages in long rails by using barker coded UGW. IEEE Access 2020, 8, 48529–48542. [Google Scholar] [CrossRef]
- Yuan, L.; Yang, Y.; Hernández, Á.; Shi, L. Novel adaptive peak detection method for track circuits based on encoded transmissions. IEEE Sens. J. 2018, 18, 6224–6234. [Google Scholar] [CrossRef]
- Burger, F.A.; Loveday, P.; Long, C. Large scale implementation of guided wave based broken rail monitoring. AIP Conf. Proc. 2015, 1650, 771–776. [Google Scholar]
- Wei, X.; Yang, Y.; Yao, W.; Zhang, L. PSpice modeling of a sandwich piezoelectric ceramic ultrasonic transducer in longitudinal vibration. Sensors 2017, 17, 2253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dennis, F. Analog Design and Simulation Using OrCAD Capture and PSpice, 1st ed.; Newnes: Oxford, UK, 2011; pp. 217–218. ISBN 9780080970950. [Google Scholar]
- Galloy, L.; Berquez, L.; Baudoin, F. PSpice modeling of the pulsed electro-acoustic signal. IEEE Trans. Dielectr. Electri. Insul. 2014, 21, 1143–1153. [Google Scholar] [CrossRef]
- Sarwate, D.V.; Pursley, M.B. Crosscorrelation properties of pseudorandom and related sequences. Proc. IEEE 1980, 68, 593–619. [Google Scholar] [CrossRef]
- Manikandan, M.S.; Soman, K. A novel method for detecting R-peaks in electrocardiogram (ECG) signal. Biomed. Signal Process. Control 2012, 7, 118–128. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bits | Types | Specific Values |
|---|---|---|
| 63 | 01 | 1 → −1 → 1 → 1 → −1 → −1 → −1 → 1 → 1 → 1 → − 1 → 1 → − 1 → − 1 → −1 → −1 → 1 → 1 → −1 → 1 → − 1 → 1 → 1 → 1 → −1 → −1 → 1 → 1 → 1 → 1 → −1 → 1 → 1 → 1 → 1 → 1 → −1 → −1 → −1 → −1 → −1 → −1 → 1 → −1 → 1→ −1 → 1 → −1 → −1 → 1 → 1 → −1 → − 1→ 1 → −1 → −1 → −1 → 1 → −1 → −1 → 1 → −1 → 1 |
| 63 | 02 | 1 → −1 → −1 → 1 → 1 → 1 → 1 → 1 → 1 → −1 → −1 → −1 → 1 → 1 → −1 → −1 → −1 → 1 → 1 → −1 → 1 → 1 → 1 → −1 → −1 → 1 → −1 → −1 → 1 → 1 → 1 → 1 → −1 → −1 → −1 → 1 → −1 → 1 → −1 → 1 → 1 → 1 → 1 → −1 → −1 → −1 → −1 → 1 → 1 → 1 → 1 → 1 → −1 → −1 → 1 → 1 → −1 → 1 → 1 → −1 → −1 → 1 → −1 |
| 15 | 01 | −1 → −1 → 1 → 1 → −1 → 1 → 1 → 1 → −1 → −1 → −1 → −1 → 1 → −1 → 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, W.; Yang, Y.; Wei, X. Research on Coded Excitation Using Kasami Sequence in the Long Rail Detection Based on UGW. Electronics 2022, 11, 1465. https://doi.org/10.3390/electronics11091465
Yao W, Yang Y, Wei X. Research on Coded Excitation Using Kasami Sequence in the Long Rail Detection Based on UGW. Electronics. 2022; 11(9):1465. https://doi.org/10.3390/electronics11091465
Chicago/Turabian StyleYao, Wenqing, Yuan Yang, and Xiaoyuan Wei. 2022. "Research on Coded Excitation Using Kasami Sequence in the Long Rail Detection Based on UGW" Electronics 11, no. 9: 1465. https://doi.org/10.3390/electronics11091465
APA StyleYao, W., Yang, Y., & Wei, X. (2022). Research on Coded Excitation Using Kasami Sequence in the Long Rail Detection Based on UGW. Electronics, 11(9), 1465. https://doi.org/10.3390/electronics11091465