
Tone Mapping Method Based on the Least Squares Method


Abstract
1. Introduction
2. Background
3. Proposed Method
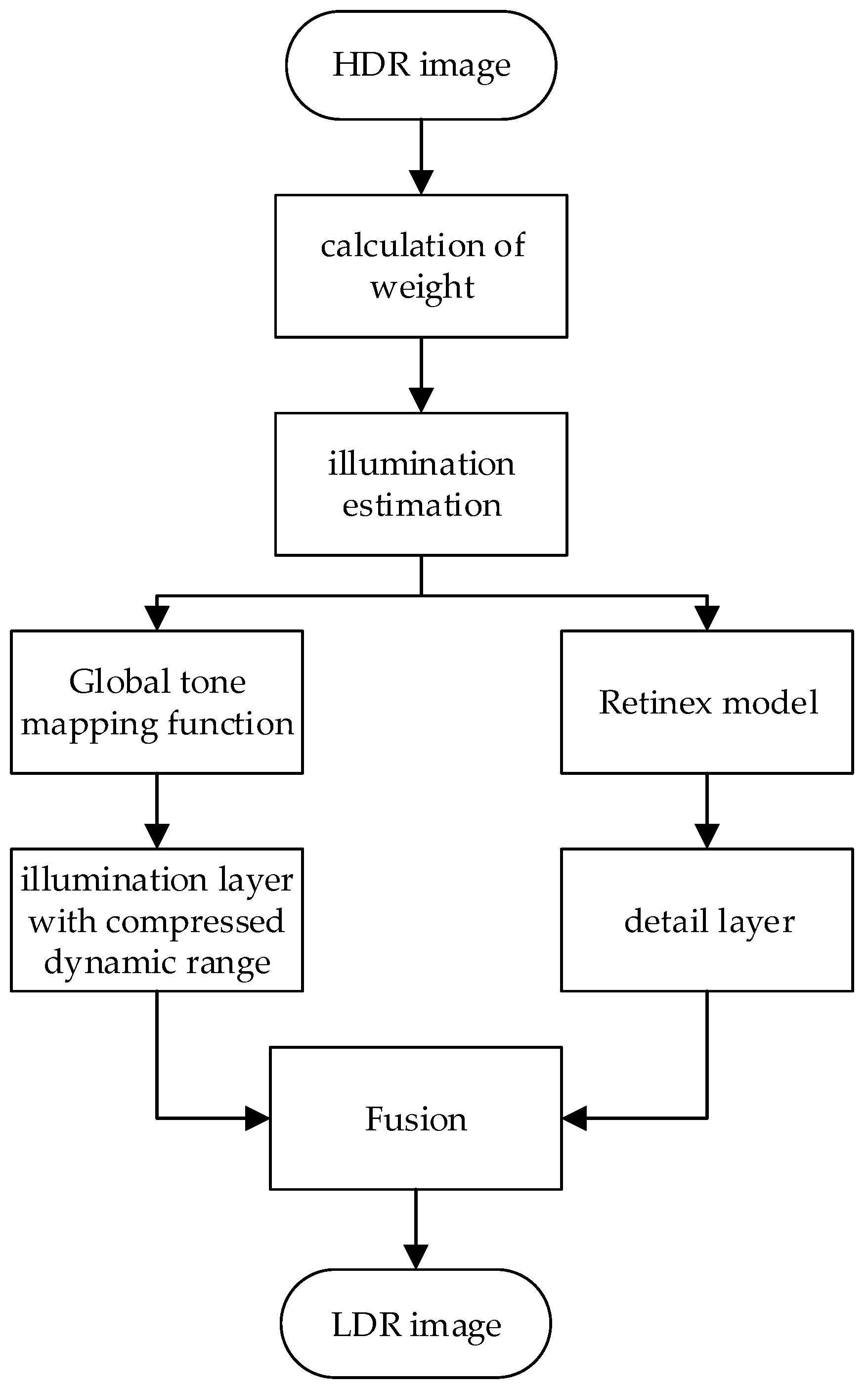
- The weight between the original image pixel points and other pixel points in their neighborhood is obtained by the least squares method, and the boundary-aware weights are introduced to prevent the halo artifacts and are used to estimate the illumination of the original image.
- The detail layer of the image is obtained by the Retinex model.
- A global tone mapping function with a parameter is used to process the illumination layer obtained in step (1).
3.1. The Illumination Estimation
3.2. Improved Illumination Estimation
3.3. Dynamic Range Compression
3.4. LDR Image Generation
3.4.1. Detail Layer Estimation
3.4.2. Image Fusion and Color Retention
4. Experimental Results and Analysis
4.1. Subjective Effect Analysis
4.2. Objective Evaluation Effect Analysis
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khan, I.R.; Aziz, W.; Shim, S.O. Tone Mapping Using Perceptual-quantizer and Image Histogram. IEEE Access 2020, 12, 12–15. [Google Scholar] [CrossRef]
- Choi, H.H.; Kang, H.S.; Yun, B.J. A Perceptual Tone Mapping HDR Images Using Tone Mapping Operator and Chromatic Adaptation Transform. Imaging Sci. Technol. 2017, 61, 15–20. [Google Scholar] [CrossRef]
- Khan, I.R.; Rahardja, S.; Khan, M.M.; Movania, M.M.; Abed, F.A. Tone Mapping Technique Based on Histogram Using a Sensitivity Model of The Human Visual System. IEEE Trans. Ind. Electron. 2018, 65, 3469–3479. [Google Scholar] [CrossRef]
- Husseis, A.; Mokraoui, A.; Matei, B. Revisited Histogram Equalization as HDR Images Tone Mapping Operators. IEEE Comput. Soc. 2017, 15, 144–149. [Google Scholar]
- Chien, B.; Mokraoui, A.; Matei, B. Contrast Enhancement and Details Preservation of Tone Mapped High Dynamic Range Images. Image Represent. 2018, 58, 22–26. [Google Scholar]
- Kai-Fu, Y.; Hui, L.; Hulin, K.; Chao-Yi, L.; Yong-Jie, L. An Adaptive Method for Image Dynamic Range Adjustment. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 15–18. [Google Scholar]
- Hui, L.; Xixi, J.; Zhang, L. Clustering Based Content and Color Adaptive Tone Mapping. Comput. Vis. Image Underst. 2018, 168, 15–20. [Google Scholar]
- Thai, B.C.; Mokraoui, A. HDR Image Tone Mapping Histogram Adjustment with Using an Optimized Contrast Parameter. In Proceedings of the International Symposium on Signal, Image, Video and Communications (ISIVC), Rabat, Morocco, 27–30 November 2018; Volume 12, pp. 15–20. [Google Scholar]
- Fahim, M.A.N.I.; Jung, H.Y. Fast Single-Image HDR Tone Mapping by Avoiding Base Layer Extraction. Sensors 2020, 20, 4378. [Google Scholar] [CrossRef] [PubMed]
- Gommelet, D.; Roumy, A.; Guillemot, C.; Ropert, M.; Julien, L. Gradient-Based Tone Mapping for Rate-Distortion Optimized Backward-Compatible High Dynamic Range Compression. IEEE Trans. Image Processing 2017, 15, 12–18. [Google Scholar] [CrossRef] [PubMed]
- Liang, Z.; Xu, J.; Zhang, D. A Hybrid l1-l0 layer Decomposition Model for Tone Mapping. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4758–4766. [Google Scholar]
- Rana, A.; Singh, P.; Valenzise, G.; Dufaux, F.; Komodakis, N.; Smolic, A. Deep Tone Mapping Operator for High Dynamic Range Images. IEEE Trans. Image Processing 2019, 29, 18–25. [Google Scholar] [CrossRef] [PubMed]
- Hu, L.; Chen, H.; Allebach, J.P. Joint Multi-Scale Tone Mapping and Denoising for HDR Image Enhancement. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2022; Volume 26, pp. 729–738. [Google Scholar]
- Yeganeh, H.; Wang, Z. Objective Quality Assessment of Tone-mapped Images. IEEE Trans. Image Processing 2012, 22, 657–667. [Google Scholar] [CrossRef] [PubMed]
- Gu, B.; Li, W.; Zhu, M. Local Edge-preserving Multiscale Decomposition for High Dynamic Range Image Tone Mapping. IEEE Trans. Image Processing 2012, 22, 70–79. [Google Scholar]
- Shibata, T.; Tanaka, M. Gradient-domain Image Reconstruction Framework with Intensity-range and Base-structure Constraints. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27 June 2016; pp. 2745–2753. [Google Scholar]
- Khosravy, M.; Gupta, N.; Marina, N. Perceptual Adaptation of Image Based on Chevreul–Mach Bands Visual Phenomenon. IEEE Signal Processing Lett. 2017, 24, 594–598. [Google Scholar] [CrossRef]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “completely blind” image quality analyzer. IEEE Signal Process. Lett. 2012, 20, 209–212. [Google Scholar] [CrossRef]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Index | TVI-TMO | Li et al. | Aziz et al. | Gu et al. | Shibata et al. | Proposed Method |
|---|---|---|---|---|---|---|
| 1 | 0.725 | 0.735 | 0.785 | 0.822 | 0.796 | 0.896 |
| 2 | 0.693 | 0.705 | 0.728 | 0.832 | 0.826 | 0.908 |
| 3 | 0.753 | 0.723 | 0.722 | 0.831 | 0.785 | 0.886 |
| 4 | 0.659 | 0.695 | 0.732 | 0.796 | 0.801 | 0.876 |
| 5 | 0.698 | 0.698 | 0.702 | 0.852 | 0.793 | 0.894 |
| 6 | 0.682 | 0.712 | 0.712 | 0.804 | 0.811 | 0.898 |
| 7 | 0.632 | 0.722 | 0.710 | 0.832 | 0.786 | 0.901 |
| 8 | 0.689 | 0.709 | 0.722 | 0.862 | 0.822 | 0.876 |
| 9 | 0.705 | 0.708 | 0.709 | 0.821 | 0.815 | 0.903 |
| 10 | 0.688 | 0.725 | 0.774 | 0.832 | 0.813 | 0.893 |
| 11 | 0.668 | 0.731 | 0.765 | 0.845 | 0.809 | 0.901 |
| 12 | 0.675 | 0.724 | 0.755 | 0.833 | 0.795 | 0.897 |
| 13 | 0.685 | 0.706 | 0.742 | 0.826 | 0.782 | 0.882 |
| 14 | 0.690 | 0.730 | 0.738 | 0.836 | 0.821 | 0.902 |
| 15 | 0.675 | 0.726 | 0.729 | 0.842 | 0.796 | 0.896 |
| Average | 0.687 | 0.720 | 0.734 | 0.831 | 0.803 | 0.893 |
| Image Index | TVI-TMO | Li et al. | Aziz et al. | Gu et al. | Shibata et al. | Proposed Method | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MLWC | NIQE | MLWC | NIQE | MLWC | NIQE | MLQC | NIQE | MLWC | NIQE | MLWC | NIQE | |
| 1 | 1.225 | 5.56 | 1.263 | 5.26 | 1.325 | 4.89 | 1.456 | 3.75 | 1.320 | 3.62 | 1.689 | 3.06 |
| 2 | 1.382 | 5.89 | 1.256 | 5.36 | 1.382 | 4.86 | 1.442 | 3.85 | 1.423 | 3.52 | 1.742 | 3.16 |
| 3 | 1.330 | 5.36 | 1.396 | 5.12 | 1.430 | 4.92 | 1.323 | 3.91 | 1.425 | 3.66 | 1.623 | 2.94 |
| 4 | 1.356 | 5.45 | 1.423 | 5.14 | 1.456 | 4.93 | 1.412 | 4.04 | 1.365 | 3.42 | 1.712 | 3.26 |
| 5 | 1.289 | 5.25 | 1.368 | 5.13 | 1.489 | 4.95 | 1.469 | 3.82 | 1.423 | 3.44 | 1.569 | 3.56 |
| 6 | 1.332 | 5.54 | 1.232 | 5.22 | 1.332 | 5.01 | 1.303 | 3.88 | 1.436 | 3.38 | 1.603 | 3.18 |
| 7 | 1.236 | 5.38 | 1.389 | 5.15 | 1.336 | 4.75 | 1.330 | 3.76 | 1.496 | 3.51 | 1.630 | 2.89 |
| 8 | 1.256 | 5.42 | 1.323 | 4.95 | 1.356 | 4.79 | 1.498 | 3.81 | 1.368 | 3.55 | 1.598 | 3.18 |
| 9 | 1.212 | 5.39 | 1.225 | 5.02 | 1.412 | 4.85 | 1.305 | 3.84 | 1.456 | 3.78 | 1.605 | 3.14 |
| 10 | 1.265 | 5.72 | 1.386 | 5.11 | 1.365 | 4.91 | 1.412 | 3.91 | 1.423 | 3.70 | 1.612 | 3.17 |
| 11 | 1.313 | 5.32 | 1.389 | 5.18 | 1.213 | 4.93 | 1.363 | 3.69 | 1.425 | 3.78 | 1.563 | 3.11 |
| 12 | 1.158 | 5.63 | 1.305 | 5.06 | 1.258 | 4.99 | 1.423 | 3.70 | 1.403 | 3.69 | 1.723 | 3.12 |
| 13 | 1.268 | 5.75 | 1.332 | 5.13 | 1.352 | 4.97 | 1.412 | 3.83 | 1.456 | 3.59 | 1.659 | 3.08 |
| 14 | 1.312 | 5.12 | 1.268 | 5.11 | 1.372 | 4.86 | 1.386 | 3.62 | 1.432 | 3.65 | 1.756 | 3.25 |
| 15 | 1.330 | 5.35 | 1.392 | 5.03 | 1.402 | 4.88 | 1.396 | 3.72 | 1.392 | 3.58 | 1.723 | 3.20 |
| Mean | 1.283 | 5.47 | 1.330 | 5.13 | 1.363 | 4.89 | 1.395 | 3.81 | 1.473 | 3.60 | 1.654 | 3.15 |
| Image Index | TVI-TMO | Li et al. | Aziz et al. | Gu et al. | Shibata et al. | Proposed Method |
|---|---|---|---|---|---|---|
| 1 | 43.63 | 43.25 | 38.52 | 32.14 | 33.14 | 20.15 |
| 2 | 42.53 | 42.21 | 37.25 | 35.85 | 29.26 | 23.15 |
| 3 | 43.52 | 42.25 | 38.39 | 26.14 | 33.36 | 24.15 |
| 4 | 43.53 | 43.25 | 35.26 | 31.25 | 34.57 | 21.14 |
| 5 | 42.25 | 42.38 | 39.25 | 30.25 | 38.14 | 20.19 |
| 6 | 40.59 | 43.12 | 37.32 | 29.25 | 35.25 | 22.83 |
| 7 | 41.28 | 42.24 | 36.25 | 32.18 | 33.14 | 20.69 |
| 8 | 38.58 | 42.69 | 38.25 | 30.15 | 33.47 | 20.73 |
| 9 | 42.55 | 44.89 | 36.14 | 33.25 | 32.16 | 22.14 |
| 10 | 43.52 | 42.28 | 35.69 | 30.19 | 32.47 | 22.98 |
| 11 | 44.25 | 42.12 | 35.89 | 28.93 | 33.88 | 20.78 |
| 12 | 43.52 | 43.25 | 37.25 | 34.12 | 34.17 | 22.79 |
| 13 | 42.36 | 42.25 | 37.86 | 30.13 | 33.49 | 21.47 |
| 14 | 43.14 | 41.25 | 36.14 | 31.25 | 32.95 | 20.83 |
| 15 | 43.25 | 42.25 | 39.25 | 26.85 | 31.85 | 19.09 |
| Mean | 42.57 | 42.65 | 37.25 | 30.80 | 33.42 | 21.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Li, G.; Wang, J. Tone Mapping Method Based on the Least Squares Method. Electronics 2023, 12, 31. https://doi.org/10.3390/electronics12010031
Zhao L, Li G, Wang J. Tone Mapping Method Based on the Least Squares Method. Electronics. 2023; 12(1):31. https://doi.org/10.3390/electronics12010031
Chicago/Turabian StyleZhao, Lanfei, Guoqing Li, and Jun Wang. 2023. "Tone Mapping Method Based on the Least Squares Method" Electronics 12, no. 1: 31. https://doi.org/10.3390/electronics12010031
APA StyleZhao, L., Li, G., & Wang, J. (2023). Tone Mapping Method Based on the Least Squares Method. Electronics, 12(1), 31. https://doi.org/10.3390/electronics12010031