1. Introduction
At present, although the theory and application of digital signals is closely related to the rapid development of electronic technology, analog signals still occupy an important position. The proportion of analog and digital circuits in hybrid circuits is about 60% and will continue to grow, the data show. Although analog components account for only 20% of hybrid circuits, the cost of testing and diagnosing analog component has reached 80% of the total cost [
1]. There are two types of analog circuit fault modes: hard fault and soft fault. Hard faults are catastrophic faults such as an open circuit and short circuit, which are easy to identify, and soft faults are when the parameters of circuit components constantly change and deviate from their nominal values. In the event of a soft fault, the topology of the circuit will not change, but it will affect the performance of the circuit. If the soft fault is not fixed in time, it becomes a hard fault [
2]. If so, it can cause a lot of damage to the circuit and even threaten personal safety.
In order to identify soft faults in analog circuits, various diagnostic methods such as the fault dictionary method and the parameter identification method have been proposed by scholars. However, these methods are applicable to only single faults and are much more computationally intensive for diagnosing circuits dealing with multiple faults. With the development of fault diagnosis technology, linear extraction methods such as principal element analysis and factor analysis are proposed successively. These methods are more effective for linear circuits, but most circuits in daily life are nonlinear and the above methods cannot reflect the nonstationary characteristics of signals, which leads to low separability of the extracted fault features, which leads to large classification error in fault pattern recognition. For this reason, scholars have proposed time–frequency domain analysis methods, such as SVM, principal component analysis (PCA), and singular value decomposition (SVD), but each of the above time–frequency domain methods has limitations and shortcomings; for example, the typical fault characteristic parameters of SVM are difficult to choose; PCA is a linear algorithm that cannot accommodate real processes with varying degrees of nonlinearity; the performance of SVD mainly depends on the selection of embedding dimensions; however, the current embedding dimensions are mostly selected empirically and poorly adapted [
3,
4,
5]. In recent years, along with the development of artificial intelligence, more and more artificial intelligence-based methods are applied to the field of circuit fault diagnosis; for example, the literature [
6] used artificial neural networks to train and model circuit fault samples, thus improving the circuit fault diagnosis accuracy and shortening the diagnosis time, but artificial neural networks require a large amount of experimental data to form an accurate classification of fault phenomena, while the algorithm converges slowly and is prone to local minima; the literature [
7] applied a deep belief network method in deep learning for circuit fault feature extraction. Although it improved the analog circuit fault diagnosis rate, the deep learning model lacks theoretical support in parameter selection and the fault sample library is not rich enough, so there is still much room for improvement in deep learning in nonlinear analog circuit diagnosis. Due to the increasing complexity of electronic systems and the strong coupling of operating states, which leads to the complexity and diversity of their fault patterns, and sometimes even chaos, the traditional theories and methods to portray this complexity increasingly feel the limitations of the theory itself. The fractal theory developed in recent years has provided a good idea for solving this problem. Sheng et al. [
8] combined local characteristic-scale decomposition with fractal theory to effectively extract fault features of analog circuits and achieve fault diagnosis of analog circuits. Yao et al. [
9] used fractal theory and probabilistic neural networks to implement fault diagnosis of miniature circuit breakers. Mao et al. [
10] proposed the method of combining support vector machines with fractal theory and obtained good results. However, the fractal in the above methods is a single fractal. A single fractal can only describe the fractal characteristics of the signal from one perspective, which is not comprehensive enough to describe the fractal characteristics of the signal and cannot portray the local fractal characteristics of the signal. In fault diagnosis, it is difficult to achieve accurate classification and identification once there are intervals where the dimensions of different state signals overlap. The improved MF-DFA method proposed in this paper analyzes from multiple scales to comprehensively respond to the distribution of nonuniformity and probability measures of the structure of fractal objects and provides a more refined description of local fractal features. At the same time, because the actual measured signals are often accompanied by abnormal events, such as noise effects, intermittent signals, etc., leading to the occurrence of the phenomenon of modal aliasing, which has a great impact on the subsequent fault diagnosis rate, this paper thus proposes the EEMD method to preprocess the signal, which can effectively avoid the phenomenon of modal aliasing.
In summary, an analog circuit fault signal state identification method based on EEMD and improved MF-DFA was proposed in this paper. Firstly, EEMD of the circuit fault signal was carried out to obtain several IMF components with no mode overlap; then, the IMF components with circuit fault signal characteristics were selected to reconstruct the fault signal according to the circuit fault characteristics. Later, the fault signal was analyzed by the improved MF-DFA, the Hurst exponent and multifractal spectrum of the fault signal were obtained, and the multifractal spectrum width, extreme value, dimension difference and generalized Hurst exponent fluctuation mean of fault signal were calculated to the characteristic parameters of circuit fault state. Finally, the feature parameters extracted from the improved MF-DFA were classified by SVM to realize the diagnosis of the analog circuits’ soft fault.
The rest of this paper is organized as follows:
Section 2 presents the signal preprocessing method (EEMD). The signal feature extraction method (improved MF-DFA) is proposed in
Section 3.
Section 4 contains the experimental simulations and results.
Section 5 contains the conclusion.
2. EEMD
EMD is an effective method for processing circuit fault signals. EMD has the adaptive property of delocalizing time-varying features, which can decompose the signal into the sum of several IMF and reduce the coupling of feature information between signals. By decomposing the signal by EMD method, we can grasp the characteristic information of the original data accurately and efficiently, which is helpful for the mining of information characteristics [
11]. However, EMD leads to modal confusion in circuit signal decomposition. To this end, Wu et al. [
12] proposed a new method, namely EEMD, in which the unstable signal is decomposed by EEMD to obtain a stationary IMF, effectively avoiding modal confusion.
The essence of EEMD is to superimpose circuit fault signal with Gaussian white noise, and then to EMD decompose it several times, using Gaussian white noise with statistical properties of uniform frequency distribution to make the circuit fault signal have continuity at different scales, thus reducing the degree of mode confounding of each IMF component [
13]. In EEMD decomposition, the decomposed circuit fault signal components are averaged through several iterations, and the more the averaging process, the less noise interferes with the decomposition results and the more useful signals can be highlighted. Set the average number of times the original fault signal is processed to
N, initially 1, 2, …,
N. The decomposition of EEMD is as follows:
(1) Gaussian white noise
is added to the original circuit fault signal
to obtain the signal
:
(2) The fault signal components IMF at different scales are obtained by EMD decomposition:
where
n is the number of IMFs after EMD decomposition;
is the residual component.
(3)
adds different Gaussian white noise and repeats steps (1) and (2), N is the number of clusters, so when the number of noise added is equal to the number of clusters, then the iteration of the algorithm is stopped. The results of EEMD decomposition are as follows:
(4) Averaging of the IMF components after EEMD decomposition to eliminate noise interference with the signal:
The error between the reconstructed signal obtained using the sum of
and the original signal satisfies the following equation:
N is the average number of times EEMD; is the standard deviation of the added white noise; and as can be seen from the equation above, decreases with the increase of the total N. It is known from several tests that the decomposition effect is best when is 0.2 and N is 100.
The flow chart of EEMD signal decomposition is shown in
Figure 1.
As can be seen from
Figure 1, after the input excitation signal, we first add Gaussian white noise to the original signal several times, then we separately perform EMD decomposition on the signal after adding Gaussian white noise, and finally we statistically average the IMF components obtained after EMD decomposition to obtain the final IMF components. In order to eliminate the effect of noise confusion, we performed the above process for each circuit signal.
3. Improved MF-DFA
The MF-DFA method is a nonstationary time series multiple fractal characterization method based on the detrended fluctuation analysis (DFA) method proposed by Kantelhard J. w. et al. This method firstly eliminates the influence of the nonstationary trend of fault signal sequence by de-volatility process and then describes the fractal structure of time series in different dimensions by calculating the volatility functions of different order. Compared to the DFA method, the MF-DFA method avoids human-induced effects and can more accurately characterize the multiple fractal features hidden in non-stationary time series [
14]. For a circuit fault signal sequence
of length N, the steps for MF-DFA are as follows:
(1) Calculate the cumulative deviation
of the fault signal sequence
:
where
is the original fault signal sequence and
is the average value of the signal,
.
(2) The traditional MF-DFA method uses the equal sequence partitioning method, which divides the cumulative deviation sequence
into m equal-length sequences without overlapping each other on average, where the data length of each subsequence is s. When
N cannot divide s integerly, to avoid data remainder, the sequence is partitioned again from the end of the sequence, and finally 2
m equal-length subsequences are obtained. This leads to data discontinuity at the segmentation point of the fault signal subsequence, generating new pseudo-volatility errors, and there is a risk of losing the data at the end of the circuit fault sequence or disrupting the order of the original fault signal sequence in the process of constructing the subsequence, resulting in distortion of the estimated generalized Hurst index. In order to overcome the shortcoming of the traditional MF-DFA method, the sliding window technique is introduced to improve the MF-DFA sequence segmentation method. The principle of the sliding window segmentation method shown in
Figure 2.
In order to minimize the data discontinuity at the segmentation point of the fault signal subsequence and the risk of losing the data at the end of the circuit fault sequence or disrupting the order of the original fault signal sequence in the process of constructing the subsequence, this paper uses an overlapping window for segmenting the data sequence.
The sliding window overlap segmentation method results in an increase in the segmented subsequences from m or 2m to N-s + 1 (to avoid remaining data at the end, step r = 1).
(3) The local trend function of each subsequence is fitted with least-squares:
where
is the coefficient of the polynomial fit and
k is the order of the polynomial fit.
The polynomial fitting process is prone to underfitting and overfitting problems. Underfitting occurs generally because the complexity of the model used is too low and the amount of features used is too small. In this paper, because the circuit model is fixed, the number of features in the sample is increased by polynomial regression in this paper so as to solve the error problem caused by overfitting. Overfitting occurs due to a single sample of training data set, insufficient samples, and too much noise interference in the training process, so this paper selects data samples with positive and negative deviations to ensure the diversity of samples, while using the EEMD method to denoise the samples, which greatly avoids the test error caused by overfitting.
(4) Calculate the mean square error function when
v = 1, 2, 3, …,
m, with
When
v =
m + 1,
m + 2, …, 2
m,
(5) Traditional MF-DFA calculates the
q-rung fluctuation function:
Improved MF-DFA to calculate the
q-rung fluctuation function:
To ensure high stability of the fluctuation function , the fixed window length is 2k + 2< s < int (N) (in which k is the polynomial fitting order).
(6) the order q takes a certain value in turn, the scale s takes different values, and repeat steps (2)–(5) to calculate the double logarithmic value of F(q,s) for q.
(7) The fluctuation function is a function on the data length
q and the subsequence data length
s, which is related to
s as shown below:
(8) The relationship between generalized Hurst index
and scalar index
obtained by MF-DFA method is as follows:
Both sides of Equation (15) are simultaneously derived for
q:
The relationship between the multiple fractal spectrum
, the singularity index
and the scalar index
is obtained by the Lejeune transform:
Substituting Equation (15) into Equation (16) yields the following relationship:
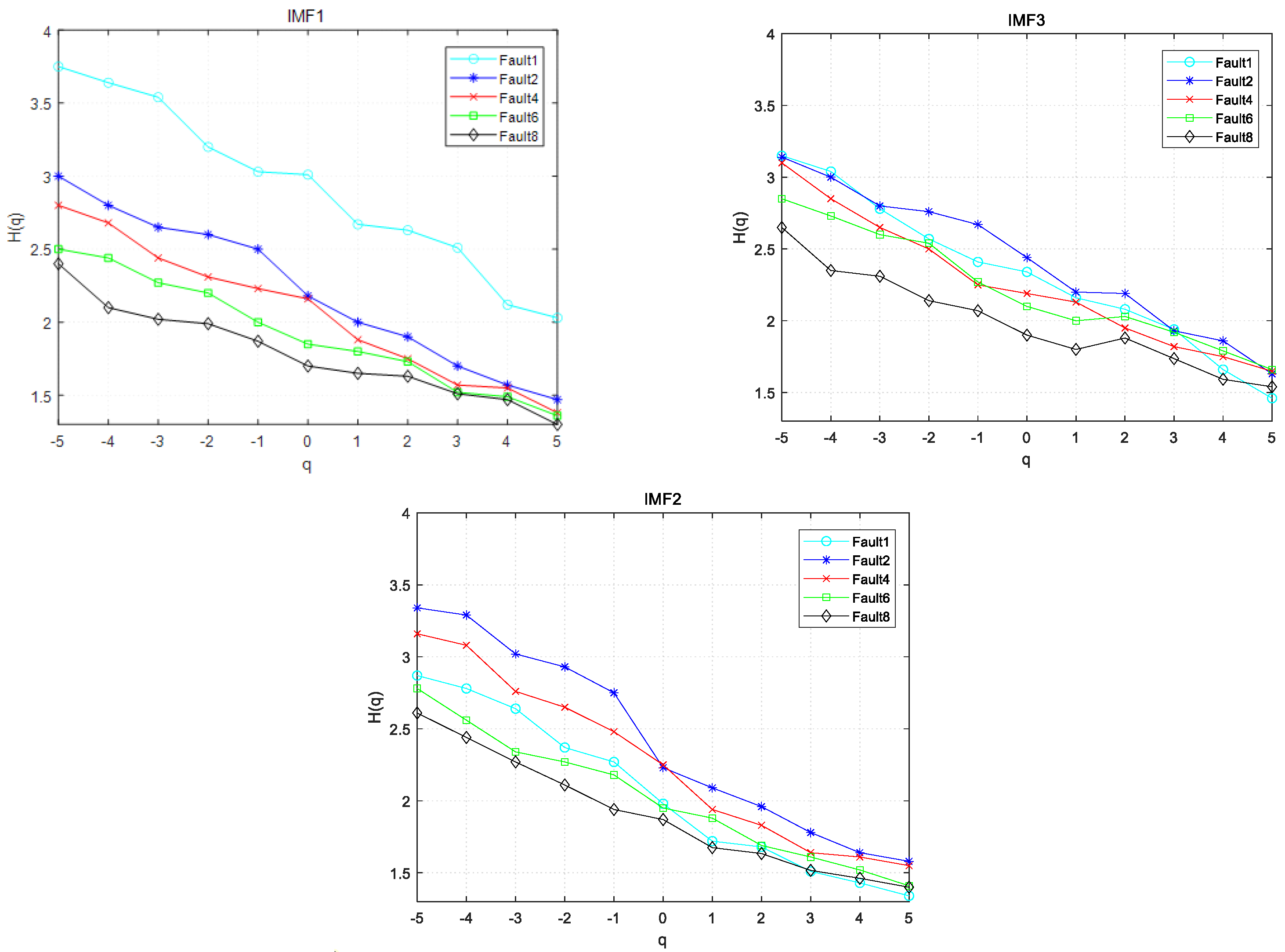
The generalized Hurst index reflects the relationship between the different scales of circuit signal and is a characteristic measure of the multifractal characteristics of circuit signal. In a coordinate system with as horizontal and as vertical, if and are a nearly smooth straight line, the circuit signal has no multifractal characteristics; if and are a non-linear decreasing function, the circuit signal has multifractal characteristics, and the more fluctuates, the stronger the multifractal characteristics of the circuit signal. Therefore, the generalized Hurst exponent fluctuation mean is taken as one of the fault’s characteristics.
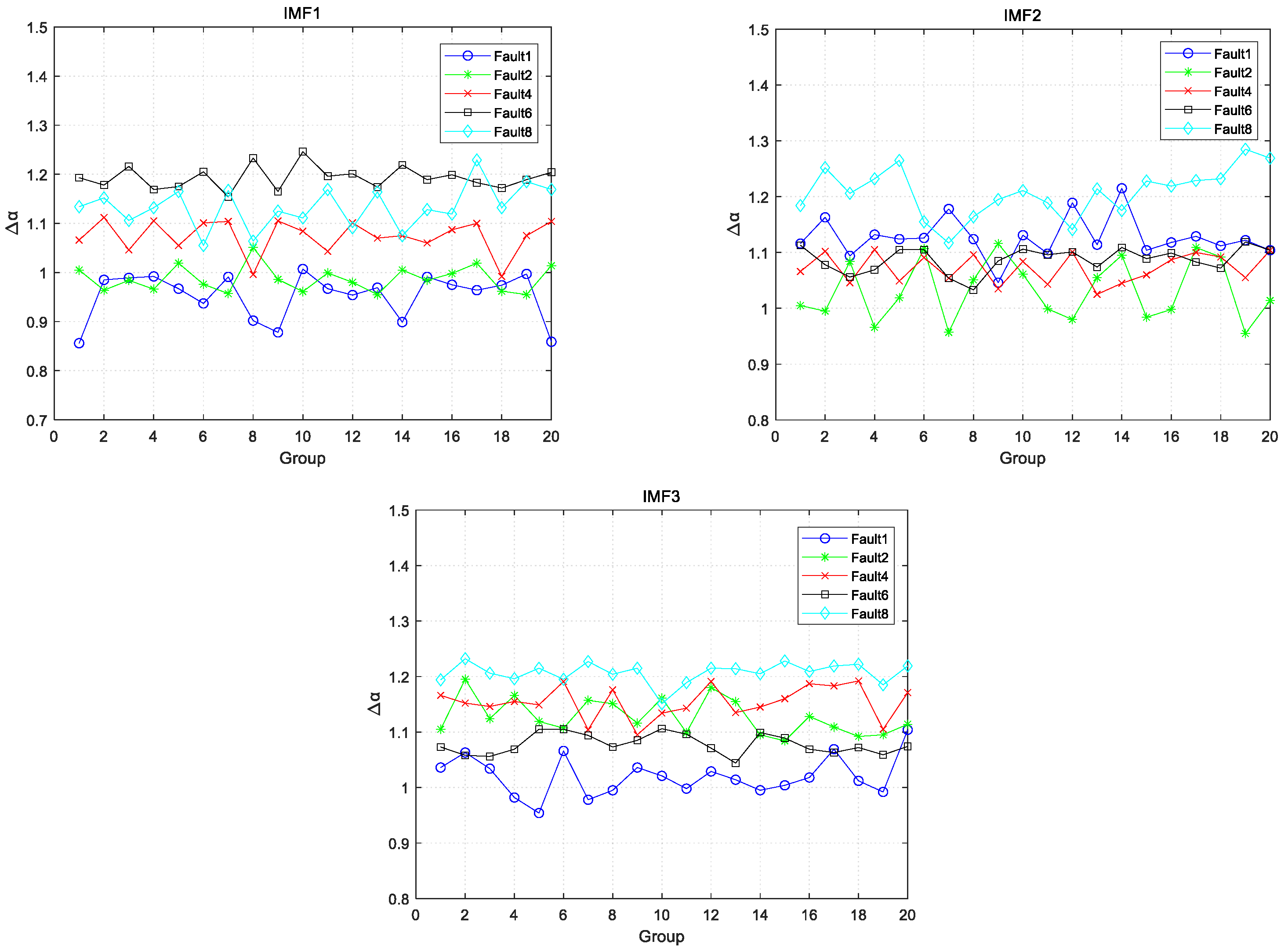
The width of the multifractal spectrum is the difference between the strongest and weakest singularities of the signal, reflecting the strength of the multifractal characteristics of the circuit signal; the stronger the multifractal characteristics, the larger the value of ; for the singularity index corresponding to the extreme value point, which reflects the randomness of the circuit signal, the greater the randomness, the greater the ; the difference between the fractal dimension of the maximum and minimum probability subsets = , reflecting the change in the maximum and minimum peak frequencies of circuit signal, which is less than 0, indicating that the number of maximum probability subsets is greater than the number of minimum probability subsets, and vice versa. Through the above analysis, it can be seen that the multiple fractal spectrum parameters can reflect the intrinsic characteristics of a fault signal in different states quantitatively; therefore, four characteristic parameters are proposed as circuit fault state identification parameters.
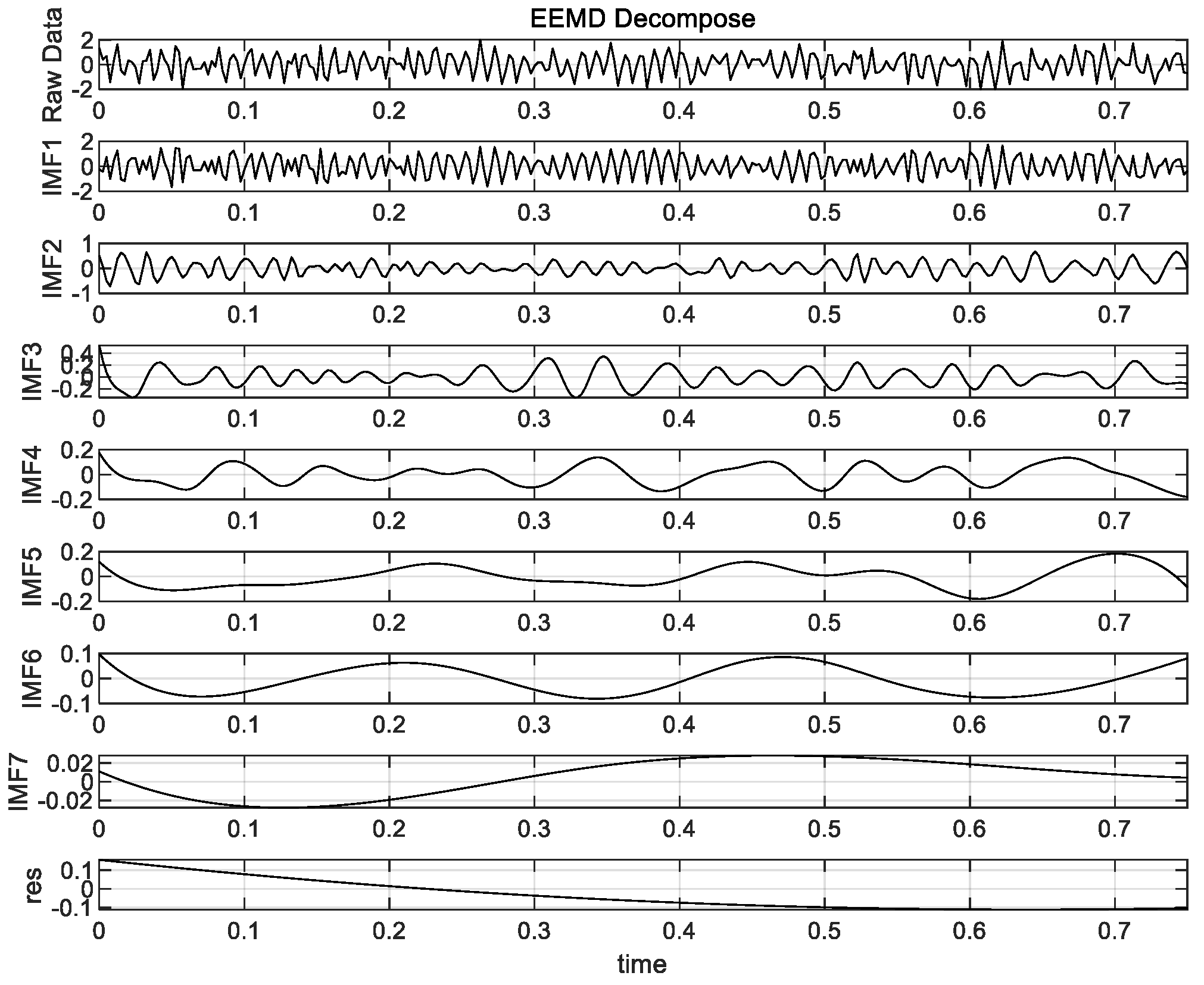
As can be seen from
Figure 3, after the original signal is processed by EEMD, a number of IMF components are obtained. The IMF components without mode overlap are selected by correlation calculation. Then, we calculate the cumulative deviation of these IMF components, and then cut the cumulative deviation sequence by sliding window to obtain N-S + 1 subseries, and then calculate the mean square error function and q-rung fluctuation function by polynomial fitting of these subseries, and finally obtain the multifractal spectrum of the fault signal by the q-rung fluctuation function, so as to calculate the multifractal spectrum parameters as eigenvalues into the support vector machine.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}