Abstract
The health monitoring system is one of the most innovative technologies that has gained traction in the Internet of Medical Things (IoMT). It allows the connection of multiple sensors and actuators that can capture and monitor the data through the web page or mobile application. IoMT technology not only provides communications but also will provide monitoring, recording, storage, and display. IoMT in healthcare is used for measuring the vital signs of the human body, which allows medical professionals to assess the well-being of a patient. The doctor may recommend lifestyle modifications, prescribe more tests, or diagnose a disorder according to the results. This paper illustrates the remote-control health monitoring system (HMS) with the integration of a UAV, which allows the doctor to access the data and analyze the patient data remotely. Thus, the proposed HMS-UAV system aims to measure the temperature, humidity, blood pressure, heart rate, and SpO2 and stores the data on the UAV. Several sensors were thus used namely DHT11, MAX30102, Myoware and K24C16, and the Raspberry Pi camera. Reduced hospital stays and avoidance of readmissions are benefits of remote patient monitoring with IoMT-based UAVs. Contrary to its advantages, IoMT has flaws in information processing since a huge volume of data are needed to be handled in a single environment. One major novel inclusion in this work is to measure multiple parameters and provide a comparative analysis for all of them. Furthermore, the functionality of video recorded and stored is included where the doctor can surveil the patient.
1. Introduction
Health is of major concern to the human body since it determines a person’s well-being and ensures a prolonged lifespan. Over the years, the world has been facing the inability to cope with the spread of chronic diseases due to their more advanced and mutated versions constantly evolving. This makes it essential to combat major health issues all over the world. IoT has been majorly used in improving the technology of treating patients [1]. The growth of IoT over the past few years has been exponential. In 2012, there were 8.7 billion devices connected, but it grew exponentially and, in 2020, there are 50.1 billion devices connected [2].
In [3], it is further illustrated that the market share is anticipated to be held by the most prevalent IoT applications by the year 2025. It can be noticed that 41% of the market share is for healthcare applications while 33% is for manufacturing, 7% is for electricity and other applications such as security, infrastructure, agriculture, and resource extraction, and vehicles account for the other 19%. The range of the use of IoT in the healthcare sector is enormous. It has many different applications which include telemedicine, inpatient monitoring, clinical operations, workflow management, telemedicine, connected imaging, medication management, and other applications. In [4], it is established that inpatient monitoring has the largest market share among all different applications. Considering the merits of IoT and its huge market in healthcare, this research work primarily focuses on the implementation of an IoMT framework for health monitoring systems onto UAVs to facilitate monitoring and diagnosis of patients in remote areas. This research brings out the concept of a mobile system that can be utilized by anyone and can be accessed anywhere. Surveillance UAVs have shown promise and their implementation in medicine still shows promise to improve the existing infrastructure.
Remote health monitoring is currently being implemented for various purposes that range from protecting the elderly and sending regular updates to their kin and even reducing the costs of visiting a doctor in-house. Individuals who are subjected to remote monitoring are not only shielded from a mishap, but it also contributes to the prevention of premature mortality by constantly monitoring and diagnosing the patient. There are countless other benefits such as improving data-driven decision-making and helping patients improve self-management while also reducing the cost for them. It also improves access to care, builds patient engagement, and combats clinical staff shortages. The Unnamed Aerial Vehicles (UAV) provide complete support to these kinds of people by providing medical assistance to these elderly people if they get ill. They are capable of supplying medicine to the patients if their body vitals fluctuate. The IoMT assisted UAV introduced additional aspects to the healthcare system. There are several approaches to incorporating IoMT into the health monitoring system. Clinics, hospitals, and other healthcare facilities are now utilizing IoT to increase patient comfort, improve medical decision-making, and make facilities safer for both patients and staff. IoT integration in the healthcare system makes it simpler than the traditional healthcare system which does not use IoMT. Additionally, it is used in e-health applications for early symptom detection, medical identification, emergency alerting, and computer-assisted therapy.
1.1. Contributions of the Paper
- Provides solution architecture for integrating UAV with IoMT;
- Discusses various possibilities, opportunities, and challenges on implementing the IoMT based UAV for medical assistance;
- To integrate multiple sensors for measuring various parameters, sending the obtained data to the healthcare provider through a UAV, and providing a detailed analysis for the same;
- To make the data of the patient accessible through a secure log-in page to prevent data breach, and access is provided to the kin and the healthcare provider.
1.2. Organization of the Paper
This paper is organized into four sections. First, this paper illustrates the previous research work and identifies some useful contributions made in these articles. Section 2 deals with the material and methods of this work, which describes the techniques of the suggested system and proposes a UAV model-assisted IoMT architecture. The Section 3 explores the system’s results and offers further analysis. In Section 4, we perform the accuracy analysis of the system with a machine learning algorithm, and we also discuss the challenges, opportunities, and the future scope of the UAV-assisted IoMT architecture. The Section 5 gives the conclusions of this work.
2. Literature Review
The outdoor healthcare system for older adults in emergencies was implemented by Cao et al. [5]. A healthcare system based on UAVs and IoT is created to speed up reaction times in emergencies. With the use of the UAV, the suggested system may offer older persons real-time assistance in outside emergency scenarios. Additionally, it can aid specialists or medical personnel and send emergency information utilizing communication networks. Computer-assisted treatment refers to psychotherapy or behavioral treatment that may be offered to patients through a computer program or the internet as per a publication by Chola et al. [6]. Based on the Edge Computing by mobile-based UAV last-mile delivery procedure, the system suggested by Chu et al. [7] is a UAV Delivery System framework that takes both dynamic and static service supply into account. To give a comprehensive modeling of the service supply problem in edge computing-based UAV delivery, two service provision models are provided based on the delivery system’s framework: the static delivery and dynamic computing service models. The experimental findings have effectively proved the higher performance of the suggested holistic strategy in comparison with several representative service-providing options through simulated studies depending on a conceptual UAV delivery system. Health monitoring systems are based on sensing, and according to Subramaniyaswamy et al. [8], the system mines data from the wards and diagnostic tools to determine the most effective and beneficial therapy for patients. IoT technology also allows for effective surveillance. The countless advantages of remote health monitoring were inferred from the paper by Verma et al. [9].
Su et al. [10] talk about developing some edge computer stations to enable remote distributed control and incorporating an automated defibrillator into a UAV to decrease weight. The information system controls the flight path and attitude of UAVs using the Modbus protocol and Message Queuing Telemetry Transport (MQTT). Additionally, they examine the viability of integrating this information into electromechanical systems and intend to do so in the future. Healthcare data are managed via cloud computing. This allows for the sharing of resources. It allows flexibility of services and early data integration of services with scalable data storage and parallel computing. This is inferred from the work carried out by Yang et al. [11]. Patients in the study had a wearable sensor implanted in them. The battery supply for IoT-based healthcare systems is quite restricted. The charging of these gadgets and mobile phones regularly is a drawback of IoT. Devices may exhaust patients and need nurse involvement, lowering the user experience according to Gupta et al. [12]. The cost of cloud computing increases significantly as a result of the cloud data center’s high energy consumption. A health monitoring system (HMS), however, requires the utilization of the cloud in addition to low latency and energy-consuming services. This is inferred from the research conducted by Sethuraman et al. [13]. People have become much more concerned about their health in recent years as diseases have become more prevalent. Considering the present healthcare systems, it is observed that the lack of efficiency in healthcare services often turns out to be very crucial when it comes to the situation of life and death.
Earlier efforts in the field of IoT in healthcare began with research and development initiatives based on wireless sensor networks (WSNs). According to the work conducted by Chao et al. in [14], it can be ascertained that incorporating WSNs guarantees that gadgets are economical, low-cost, dependable, and easy to transport or assemble with patients, allowing for a more efficient workflow. A similar inference is drawn from the work carried out by Subramaniyaswamy et al. in [8]. In [15], and Aggarwal et al. illustrate the blockchain-based UAV route planning system concept in this section. They assessed the blockchain-based system for exchanging medical data. It offers a dispersed network and assures users of authentication, security, privacy, and integrity. It was also proven that the suggested approach protects the users’ shared medical data’s privacy and security.
To link up the two contributing stations, Haleem et al. developed a cooperative UAV-based wireless network in [16]. The suggested solution offers on-demand communication capabilities to link the two base stations via an IEEE 802.11a/b/g/n access point (AP) placed on the UAV. In terms of the data rate, 802.11n at 2.4 GHz surpasses the other IEEE protocols, followed by 802.11n at 5 GHz, according to observations from the testing for online of vision indoors. They also concluded that 802.11n is the better protocol that may be used in emergency scenarios such as rescue efforts and medical applications. Galán-Jiménez et al. [17] propose a UAV-based network topology as well as an energy-efficient methodology to deploy IoT solutions to bring services closer to those who live in rural regions. To get around the drawbacks of running the whole IoT program, IoT applications are specifically divided into microservices and distributed into a subset of UAVs. The proportion of IoT request that is provided to users in the assessment region and the reduction in the energy consumption needed by UAVs are two metrics that demonstrate the efficacy of the suggested solution.
The study in [18] by Mukhopadhyay et al. takes into account an ad-hoc network of flying UAVs, which improves communication between distant places and facilitates data transfer. The major goal of this study is to increase data transmission performance when there is a large distance between the mobile(hospital) and the vehicular(ambulance) nodes when the vehicular node is immobile due to traffic or natural disasters. The scenarios have been examined based on a variety of parameters, including the packet conveyance ratio, throughput, and delay, to analyze performance. By promoting interoperability in rural locations. Vangimalla et al. [19] seek to improve the quality of present health care. Unmanned aerial vehicles can adopt a secure network such as Thread to accomplish this (UAV). Although this is specifically intended to increase interoperability in remote areas without the internet, another significant benefit of this study is that it aids in the collection of medical data that can be used for big data analysis and innovative community solutions that will usher in a revolution in healthcare. Additionally, this lessens the need for paper patient records, which cannot be kept for a long time or made accessible anywhere.
The use of UAVs for interior sanitation during a pandemic was discussed by Ganesan et al. [20]. According to research and prior studies, liquid sanitation is not advised; therefore, the utilization of UVC light has indeed been suggested. The prototype was capable of holding and moving a two-kilogram weight that might be utilized to move medical supplies such as medical kits, medicines, or even vaccines in an installed emergency case. Tarzin et al. [21] examined the offloading of health data from wireless terminals (WTs) used by residents of rural areas, such as user cellphones, IoT devices, vital monitoring, and other devices, using unmanned aerial vehicles (UAVs). This issue may be resolved by creating a randomization energy-efficient route selection method and then optimizing it with a greedy heuristic. To deliver a significantly better solution with a quick execution time as compared to commercialized optimization solutions for big situations, they next developed a genetic algorithm-based approach. Gregoski et al. in [22] devised a wire-free sensor network (WSN) to monitor vital signs. In this application, Spartan3 is used to process data by utilizing an FPGA architecture in parallel. The MCU’s findings are shown on an LCD, and all sensors are connected to an MCU. Regardless, not all machine components are integrated into a single unit. Desai et al. in [23] presented a mobile device-controlled Arduino-based health parameter monitoring system.
The Internet of Things (IoT) and Cloud computing are major elements of the modern architecture of a healthcare system. This system monitors the patient’s physiological characteristics by collecting data from various sensing devices integrated along with the Raspberry Pi board. Physicians generate the patient’s healthcare card, which is then published on a website so that patients and physicians may interact virtually without meeting in person [24]. Data may be stored, updated, and accessed from anywhere in the globe using cloud computing. It is ideal for remote locations when medical services are scarce. Wireless biosensor systems are currently being researched and developed for effective monitoring, according to Pantelopoulos et al. [25]. This system consists of ZigBee wireless technology and ultra-low power technology used by wireless sensors. This device employs an artificial neural network to modify the various physiological parameters while enabling wireless body area networks (WBANs) connection. To reduce interference from wireless technologies, it also uses specific bands in the 2360–2400 MHz spectrum for medical BAN services.
These smart wearable devices must be dependable, multifunctional, and easy to be used for patient monitoring. In [26], Sneha et al. proposed a new idealogy that was discussed for implementation in hospitals that provide medical attention to patients for an extended length of time, and constant supervision is essential. Despite the fact that the patient is not in a serious condition, the physicians want confirmation on their health metrics. Hospitalization costs are substantial and expensive these days. As a result, health policies in numerous nations have changed away from providing reactive, acute treatment and toward providing care outside of the hospital. As a result, the author creates sensory data that train the system to show the precise bodily characteristics of the patients. Gupta et al. in [27] designed a structure that requires data to be supplied via a GSM module connected via Bluetooth technology has been developed to reduce the problem of time waste during ambulatory services and in hospitals. The main emphasis is on regular health examinations and tracking different physical traits using various sensors affixed to the body. They focused on creating a small wearable gadget that could send data through GPRS to customized networks. A Body Wireless Sensor Network (BWSN) is utilized in remote health monitoring systems employing the Internet of Things (IoT) to wirelessly send patient health data collected by a Raspberry Pi microcontroller to doctors and caregivers [28] by Kajaree et al., and due to the long-range wireless technology, the patient’s health emergency is swiftly identified, and prompt intervention results in the patient’s life being saved.
The UAV-assisted healthcare system for COVID-19 patients to provide rapid detection, testing, and providing treatment to the patients through drone-assisted systems is discussed in the work of Naren et al. [29]. The challenges in the integration of IoMT with UAV vehicles are discussed in the work of Seid et al. [30]. This work deals with the challenges regarding the privacy and security of the end user. The work related to the automation of IoT sensors which works with an automation control algorithm framework is discussed in the work by Jia et al. [31], and it deals with self-organizing UAV-based IoT networks. Various Emerging Technologies of the IoMT are discussed in the work by Razdan et al. [32]. The paper provides an introduction to IoMTs and then moves on to an IoMT architecture. Later, it describes the existing activities of the health service and how they are mapped into the architectural design.
Khan et al. [33] emphasize the significance of distributed modular infrastructure built on blockchain technology for creating effective fog environments that manage data from drones. Such emerging ecosystems enable tracking of urban land cover variations and data management for a prospective future. They have suggested B-Drone, a decentralized framework for fog-based UAV information management that is supported by a hyperledger sawtooth and blockchain. This design enables UAVs to collect image-based input from the specified area of urban regions and share it with the base station’s WSN for processing.
Summary of the Literature Review
Considering the literature review and the extensive work carried out in the field of IoMT and UAVs, the proposed system has been designed to adapt to the retention and retrieval of the data by the nodeMCU microcontroller. The built-in analog-to-digital converter transforms the analog values captured into digital data. This proposed system has the added advantage of Wi-Fi technology, which makes this device more reliable than the other devices. In addition, this system can analyze the patient’s data through the webpage, and the system is equipped with an OLED display to show the readings on the hardware itself. This allows the patient to be aware of the current condition of the body and also notify the healthcare providers in case of a spike in the body readings. This system is also tested by one of the authors. To summarize, this system will be a viable e-health solution that can be easily integrated with the existing healthcare facilities. Unmanned aerial vehicles (UAVs) are crucial for transmitting patients ’ data to doctors. It aids in data transmission that is secure and error-free. The line of sight between two users is maintained by the UAV. The likelihood of data loss is reduced, and security is improved. The data are automatically sent by UAV using aerodynamic force. This study used the Ardupilot, an embedded airplane that utilizes the Arduino IDE. With the aid of the autopilot feature and GSM, this Ardupilot enables guiding the UAV. The fly-by-wire approach was employed in this concept for data transfer.
Table 1 focuses on the challenges in the pre-existing works.

Table 1.
Comparison of the significant existing works.
3. Architecture of the System
The proposed system is developed by the following three methods which include hardware setup, firmware development, and webpage creation. When the system’s power is turned ON, the sensor starts to take values that are noted sequentially. The system incorporates different sensors to monitor SpO level, pulse rate, blood pressure, and temperature, namely MAX30102, DHT11, and Myoware. These sensors capture physiological data from the human body and transfer it to the NodeMCU module, which thereby converts it to digital format. These data can be observed on the OLED display which is attached to the hardware setup itself. The digitized data are further stored in the UAV and transported to the server and thereafter shares the measured data with a web application. The IoT domain model for the proposed system is depicted in Figure 1, which details how the technical artifacts function as interfaces between the physical and virtual entities and also showcase the system architecture for the proposed system.
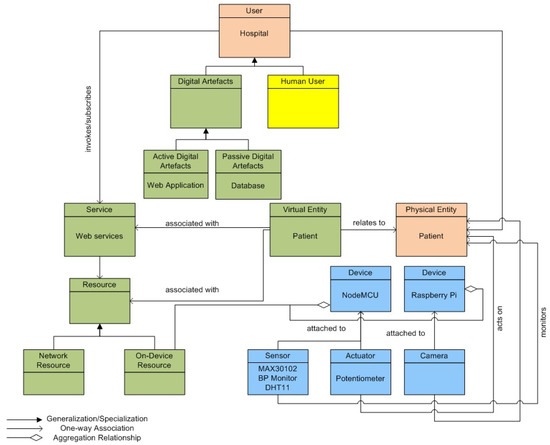
Figure 1.
Domain model of the health monitoring system.
The health monitoring system consists of a NodeMCU which is connected to the internet and is also responsible for collecting the data from the patient’s body and displaying it on the webpage, which can be analyzed by the doctor. MAX30102 is used to measure heart rate and SpO levels using the Photoplethysmography (PPG) technique. PPG is a technique that uses a light source and a photodiode detector placed on the surface of the skin to monitor the volumetric changes in blood circulation. The working of MAX30102 has two major components which are Heart rate measurement and Pulse Oximetry. In arterial blood, oxygenated hemoglobin (HbO2) is present, which has the property of absorbing infrared (IR) light. The greater the hemoglobin content present in a person’s body, the more its tendency to absorb IR light will be. The DHT11 sensor senses temperature and humidity while the pulse oximeter determines blood oxygen saturation and pulse rate using a laser beam. An automated BP monitor (K24C16) is used to monitor the patient’s systolic and diastolic pressures at regular intervals. It works by employing optical sensors that are positioned on the fingertip to detect how much light is reflected from the blood vessels beneath the skin. A Myoware sensor is used to measure muscle movement by electromyography (EMG). This technique is used for evaluating muscle responses that arise as a result of nerve stimulation. The proposed system is also capable of measuring the ambient skin temperature which can serve as a biomarker for sympathetic nervous system activation. Skin temperature rises as a result of increased blood flow and vasodilation to the body’s peripheral regions brought on by a decrease in arousal, or sympathetic outflow.
We propose in this work a way for monitoring life disasters to ensure safety at an early stage by collecting and sending health information of people who have contacted a medical UAV for a health checkup. The following summarizes the aim of the proposed system as shown in Figure 2:
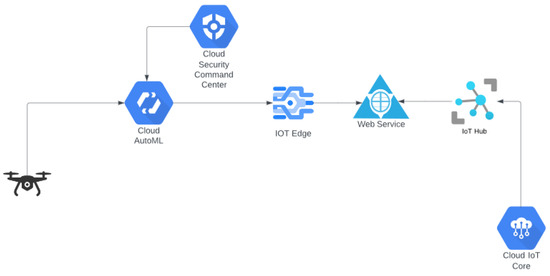
Figure 2.
UAV based futuristic patient monitoring and support systems.
AutoML is believed to be about algorithm choice, hyperparameter tweaking, modeling iteratively, and model assessment. It aims to simplify machine learning operations by using less code and avoiding human intervention in parameter selection. The key innovation of AutoML is the hyperparameters search technique, which is used for preprocessing elements, choosing model types, and improving their hyperparameters. There are many different types of optimization algorithms, ranging from Bayesian and genetic algorithms to grid and random search. The cloud Security Command center is a part of the AutoML to protect the data being sent to and from the the UAV for processing. This ensures that there is no data leak in the system and avoids intrusions. The IoT Edge is where devices and sensors shown in Figure 3 communicate to a network to provide real-time data. Since data are handled and processed near its place of origin using IoT edge computing, latency problems with the cloud are resolved. IoT Edge design also improves security and user experience while reducing latency. IoT Edge may be used to analyze vast volumes of data almost instantly over a high-throughput network, such as 5G, giving the user a more complete and immersive experience. An IoT application and the devices it administers can communicate with one another in both directions using the Platform-as-a-Services (PaaS) known as IoT Hub that is hosted in the UAV. IoT Core is designed to be flexible as a managed service to securely connect, manage, and ingest data from vast fleets of connected devices. It offers simple identity provisioning, allowing devices to read the majority of the data, scalability, performance, and interoperability, and support for the majority of industry-standard IoT protocols. The IoT core is implemented in the data collection stage, whereas the IoT hub is in the data transmission stage; similarly, the IoT Edge, AutoML, and the security command center are part of the data processing stage as seen in Figure 4.
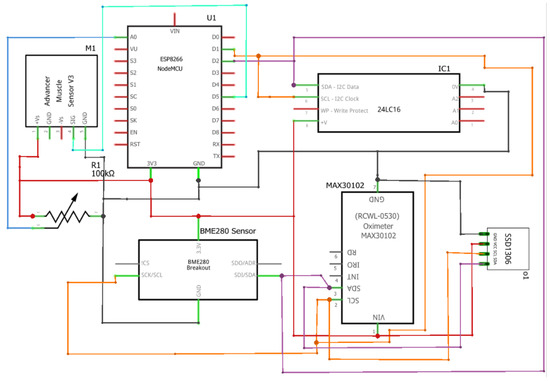
Figure 3.
Circuit diagram of the sensors.
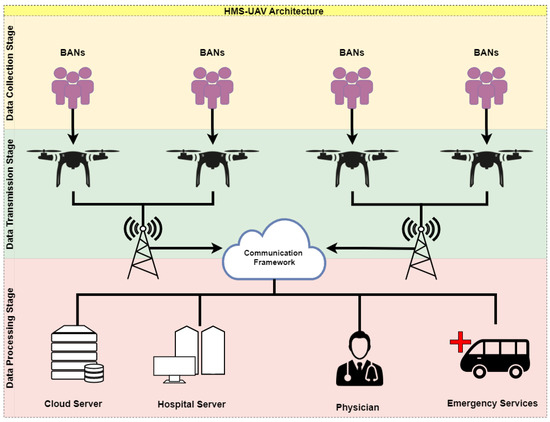
Figure 4.
IoMT service architecture.
To begin collecting health data from an active body, the proposed health monitoring system is connected to the system of the Unmanned Aerial Vehicle since most of the components can be repurposed in the UAV navigation as well. The sensors mentioned earlier are coupled into the system in this study to collect critical health and emergency information. A gateway is also created to gather, store, and transmit data through a NodeMCU microcontroller to the UAV.
The design system can transmit acquired data via unmanned aerial vehicles (UAVs) even at hilly or island places where communication is at risk. The data transmission is examined by joining two or three unmanned units in this study with the inbuilt health monitoring system. Given the time and cost of the investigation, the UAVs are initially organized within the cell structure data relay in cellular communication. Each cell is in the shape of a triangle where the edges represent the UAVs that relay data to the base station in the center. Irrespective of their range of data collection, these UAVs can store the healthcare data in their in-board storage systems and relay it at the network availability zone. In the future, the delivery range and response time can be significantly increased by adding more UAVs.
The central base station in every cellular structure has to gather the sent data and notify the application system for emergency data alerting. When data obtained via a sensor exceed the permitted range after the user’s normal health index is saved in a database, an alarm is generated. The data obtained by the UAV is relayed to medical personnel, family members, and emergency workers, allowing them to take necessary action. The system can be designed as an application that may be accessed via a mobile device and the obtained health measurements can be readily accessed in the system proposed in this paper.
After analysis of the data sent from the central base to the hospital or clinic, the UAVs can also play a role in post-analysis treatment by the transportation of medicines to these remote locations. The report for analysis is auto-generated and available on the webpage for patient access. The UAVs can also be directed to re-visit the patient after a set period for a regular checkup on the previous analysis and detect improvements in the patient health.
The schematic diagram, as portrayed in Figure 3, is designed in a Fritzing environment. All the required connections between the microcontroller and other peripherals are given in the circuit diagram. All the sensors are connected to the GPIO pin of NodeMCU, which is powered via a USB cable.
The next three phases make up the HMS-UAV architecture, as shown in Figure 4.
- Phase 1—Data collection: During this stage, the UAV gathers patient data from several BANs. The cores often have access to these details. This is explained further in Figure 5, where the architecture uses UAVs to reliably and efficiently gather data from the BANs. In the suggested architecture, the UAV arranges the cores into a star network topology and manages resources using a WUR approach. WUR and data transfer, respectively, employ data and control channels.
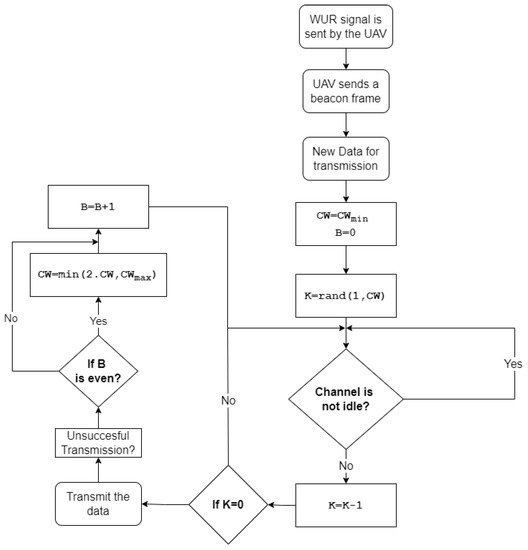 Figure 5. Schema of the suggested protocol.
Figure 5. Schema of the suggested protocol. - Phase 2—Data Transmission: This is when the UAV communicates the data it has gathered to data servers, medical servers, and doctors.
- Phase 3—Data processing: During this stage, servers process patient data to make different health choices, including real-time prescription and diagnosis. This architecture is involved with a fog layer interface between the UAV and IoT sensors. The next step is data integration. After that, we generate the dataset. From the dataset, we classify the results of the sensor into normal and abnormal classes using a Decision Tree, where the accuracy is tested regarding the performance of the data extraction and analysis.
It is challenging to build a beacon-based synchronizing technique to align the UAV’s scheduling with BANs because the protocols being used for BANs typically adhere to the IEEE 802.15.6 standard, which uses beacon transmission for synchronization. One of the key causes is that each core must be operational for periodical beacon transmission to continue, regardless of whether they intend to deliver data.
Additionally, while the cores are in standby mode, the beacons could not be picked up, lengthening the time it takes for data to be sent. It is suggested to employ a wakeup-radio (WUR) based communication method that enables the UAV to effectively gather data from several BANs. The following two steps make up the suggested technique:
3.1. WUR Stage
For WSNs, the WUR idea has previously been modified to address the drawbacks of synchronization and duty cycle techniques. The WURs may enable the UAV to connect with the cores dependably since they are more efficient for delay-sensitive and low-power applications. WUR circuits can be installed in the core and the UAV, respectively. While the passive WUR circuit relies on the WUR’s signal for power, the active WUR receives its supply from the UAV’s battery. There are two ways to use the WUR:
- (1)
- Out-of-band WUR, which uses two channels for data communication, i.e, a control channel for delivering WUR packets and a data channel for data transmission;
- (2)
- In-band WUR, which uses a single channel for both data and wake-radio signal transmission. In the method we suggest, a UAV transmits a wake-radio signal to the cores on a different control channel whenever necessary by adapting an out-of-band WUR. When the signal reaches the cores, which are in charge of their BANs, it opens up the primary channel for data transmission to the UAV.
3.2. Data Collection Stage
The data channel is constrained by superframe structures, similar to those in the IEEE 802.15.6 standard. A Random Access Period (RAP), a beacon, and an optional Contention Free Period (CFP) make up each superframe. Beacons are utilized to transmit control data such as superframe borders and packet sizes. The cores use a prioritized Carrier Sensor Multiple Access with Collision Avoidance (CSMA/CA) protocol to transfer data to the UAV using the RAP. Variable time periods are set aside during the optional CFP period for multimedia traffic.
The priority-based system in this work’s CSMA/CA adaptation has three priority tiers. The priority levels distinguish cores that contain life-critical information; this is significant in disaster zones because several cores may have life-critical information and require immediate access to the channel. Following receipt of the WUR signal as well as the beacon frames, all cores adjust their back-off counter represented by K, to a random number between (1, CW), where the contention window is represented by CW and is chosen from the least and highest contention bounds in the range . When K is 0, the core transmits information to the UAV and decrements it for every unoccupied slot. The value of the CW is doubled for every even quantity of failures, by the IEEE 802.15.6 standard. The high-priority core will have a tiny CW, allowing it to transfer the data just before the low-priority core. After a successful transmission, the backoff stage, indicated by B, does not reset. The amount of CW may be scaled effectively because the present backoff stage indicates the total number of effective transmissions or collisions of the UAV data.
The data flow schema for uplink transmission is such that the UAV initially sends a WUR signal to the core. Once the core is operational, the UAV emits a beacon frame that specifies the period bounds. The core transmits data to the UAV through the previously specified prioritized CSMA/CA protocol. When the data have been received, the UAV transmits an acknowledgment back. A similar data flow schema is used for multimedia transmission, which includes the live patient video, and just like uplink transmission, after the request is received in the beacon frames, the cores transfer the multimedia information in the CFP slots. The data flow schema for downlink transmission is such that, in the beacon, the UAV may provide downlink control data such as synchronization and configuration frames. Figure 5 provides the suggested protocol’s schema.
4. Results
The proposed system displays the monitored signals through two different means, firstly, with the help of the OLED display that is directly inbuilt into the monitoring system, as well as with the help of the web application that is being developed which allows for accessing the data remotely using Wi-Fi technology. The webpage for the proposed system is developed using HTML and CSS (Cascading Style Sheets). This system takes the data from the sensors, namely MAX30102 and DHT11, using the “Get” command, to securely pass the sensor data through the NodeMCU, and finally to the webpage for getting it displayed. The developed model was tested on a real-time basis among the group members of the project, and the results from the gathered data were analyzed, which was successfully shown on the OLED display and the designed webpage. The microprocessor is used to calibrate the readings of the body temperature sensor and pulse rate sensor. The complete prototype of the health monitoring system with all the sensors and devices, where the output values of the sensors are computed and displayed on the OLED SSD1306 display, can be visualized by the patient or a nurse taking care of the patient as well.
Another aspect that was taken into consideration while developing the proposed model was security, for which password hash encryption protocol is used to save the system from any third-party data breaching agents. The user needs to log in with the right credentials of his registered profile on the webpage; otherwise, the user does not have access to see any data available on the webpage. Hence, this adds a vulnerable security system to this developed device. The page in Figure 6 can only be accessed after a sign-in is completed using the credentials provided by the healthcare organization.

Figure 6.
User interface of the “Your Health” webpage.
The real-time heart rate, SpO percentage, and body temperature of the patient as displayed in the “Your Health” webpage are shown in Figure 7. In addition, the respective plots of the displayed parameters that have been interfaced from the sensors are depicted by real-time plots as shown in Figure 8. The sensor readings for the same are also sent subsequently to the database server.
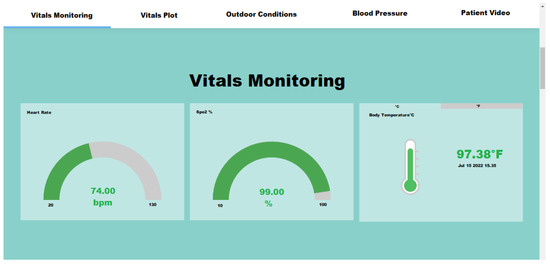
Figure 7.
Vitals monitoring page in the website.
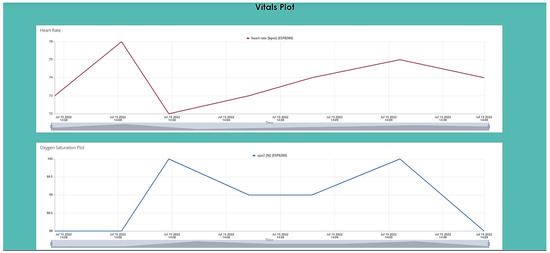
Figure 8.
Data visualization on the website.
Figure 9 displays the systolic and diastolic pressures of the patient and the data for the same are obtained from 24LC16 IC, which is easily integrated with an automatic blood pressure machine to keep track of the patient at regular intervals and the measured pressure values are sent to the website after each measurement.
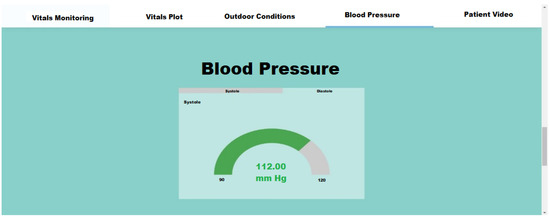
Figure 9.
Systolic and diastolic blood pressure displayed on the website.
Figure 10 and Figure 11 help the doctor or the healthcare professional to better understand the patient’s condition by analyzing the external conditions and through virtual inspection of the patient’s live feed that is streamed using the Raspberry Pi’s camera; the Pi’s camera is also used for autonomous traversal for the UAV besides providing video feedback of the patient.
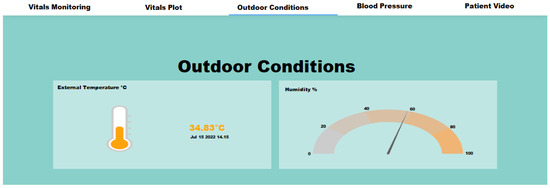
Figure 10.
Patient’s surrounding weather conditions displayed on the website.
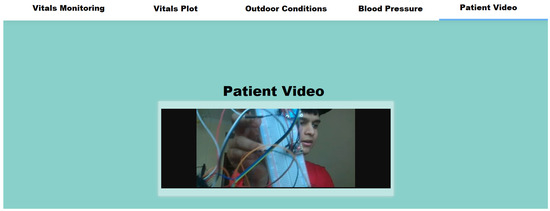
Figure 11.
Live feed of the patient displayed on the website.
This feature provides an edge for healthcare professionals to analyze if the patient is feeling uneasiness or if certain illnesses are triggered due to the influence of one’s surrounding conditions. Figure 12 shows how the website alerts the healthcare professionals when the vitals cross the set thresholds during monitoring. The working pseudocode of the prescribed work is presented as follows:
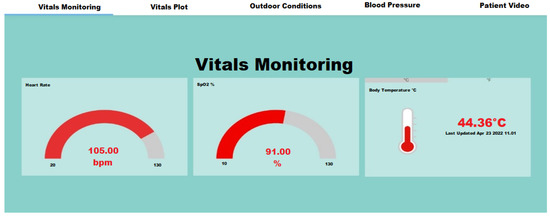
Figure 12.
Website reaction during a spike in vitals and temperature.
- Step 1: Identify the patient.
- Step 2: Collect the vitals SPO2, BP, Temp, and Heart Rate.
- Step 3: Calculate the detection function for the respective signals .
- Step 4: Perform AND operation .
- Step 5: Predict the trigger function .
- Step 6: Proceed to the next step in case the threshold is crossed ELSE to STEP 2.
- Step 7: UAV transmits the alert signal .
- Step 8: END.
5. Discussion
5.1. Machine Learning Experimentation and Result Analysis
The system generates the reports of the patients in real time through live streaming of the data. The data are captured in the UAV and, once it returns to the base station, it is stored in a database which is developed by the authors through the web service that is also implemented originally. The system is trained with 452 instances of the live stream data from the designed web page’s server. These instances train the system with Logistic Regression, Decision Tree, Random Tree, and Random Forest algorithms. The test cases are run with a 66–34% split up of the training and the test data. The system takes 154 instances to test the performance of the system with various algorithms, and results are tabulated in Table 2. The decision tree provides an accuracy of 96.7532%, the Logistic Regression provides an accuracy of only 87.6623%, Random Tree provides an accuracy of 98.7013%, and the Random Forest algorithm provides an accuracy of 98.7013% as shown in Table 3:
where are the values of the heart rate, SpO, temperature, and myoware signals, respectively, and , and are the detection functions, respectively. is an AND gate function that obtains inputs from different parameters in parallel. Whenever any parameter drops within these set limits, a trigger is set to the website, and the onboard buzzer as the following low-trigger function
Table 2.
Different types of the parameters used.
Table 3.
Results of different ML algorithms.
The performance of these systems is compared with the various machine learning algorithms and tabulated in Table 3 The random forest algorithm predicts with 98.7013% accuracy on the test data evaluation, which is on par with the random tree results. Thus, this system provides the best accuracy even in the situation of the real-time data analysis of the live streamed data on the web service. Thus, the proposed system provides adequate performance with the desired accuracy of producing the results of the vitals. The results are shown in Figure 13.
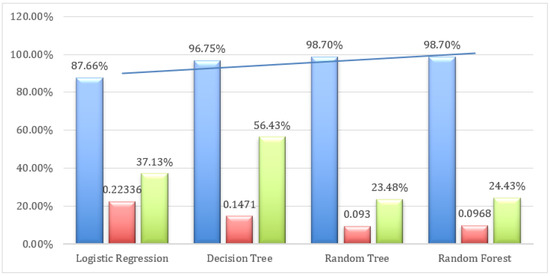
Figure 13.
Performance comparison of various machine learning algorithms.
5.2. Challenges of the UAV-Based IoMT
- Integrity: The system has to be calibrated and frequently checked for integrity gaps due to a lack of control of the system. These UAVs have to be called back to the base after regular intervals for maintenance.
- Security: The security of these deployed UAVs is of major concern. Protecting them from climatic calamities, collision with birds, and malfunctioning mid-flight are some of the major concerns. It is important to develop a predictive decision-making algorithm to protect and secure UAVs from the above security concerns. Another security issue would be a data breach, since the UAV is storing the data in the system before transmitting it to a base station, it may be susceptible to data manipulation or attacks before relaying the data.
- Confidentiality: It is critical to safeguard sensitive data and information interchange between the UAVs and the base station from unwanted access since this might be a source of sensitive patient information leaks or video access into other people’s property. Thus, it is important to consider developing effective cryptographic methods to prevent the adversary from gaining such information.
- Reliability: Some failures are more critical than others during a normal mission: loss of GPS signal, loss of data stored from the patient, or loss of control over system functions are some examples. As a result, multiple degrees of rising importance to a fault must first be established. Furthermore, failures must be subdivided into sections based on the individual mission and the UAV. Then, for each scenario, appropriateness, and a preventive projected scenario, a minimum acceptable degree of reliability must be defined.
- Authorization: Data exchange in the UAV system must be restricted to authorized users only. Unauthorized users are not permitted to undertake any actions in the UAV’s communication network. Furthermore, the UAV system must describe which resources an authorized user has access to. Access to such resources must be monitored using access control regulations.
- Non-disclosure: In the privacy requirements of the UAV, it is important to include the non-disclosure property. It is important to keep sensitive information shared between the base station and the UAV, such as photographs and surveillance video for maneuvering that has been acquired, private from 3rd party users.
5.3. Opportunities
- Remote monitoring and support of medication is possible through UAV vehicles during COVID infection times;
- The UAV systems provide support through first aid kit provision during a flood or any other natural calamities;
- The UAV systems provide medical assistants in military war zones for injured army persons through telemedicine;
- The similar system can detect patients in the hospital who needs immediate medical attention in the background.
5.4. Future Directions
Many MAC protocols have been suggested for UAV-based connectivity for WSNs, but none of them have been approved as a standard procedure. One of the major reasons is that these protocols are designed for a specific objective and do not provide high throughput, low-power communication, synchronization, scalability, and other features. The CSMA/CA protocol enables fast throughput with little synchronization cost, but it needs alternate methods to prevent collisions between numerous cores in disaster zones when several BANs must relay data urgently.
UAVs often follow a variety of paths and may fly or hover continuously. This has an impact mostly on the coverage zones that the UAVs can monitor and detect for data collection. Whenever the UAV is stationary, the problem is identical to that of WSN coverage; however, once the UAV is moving, numerous UAVs may be necessary to cover a certain region for data gathering. Coverage difficulties must be addressed as part of smart healthcare systems, with an emphasis on maximizing and improving coverage in affected areas.
Localization methods are critical for monitoring and tracking UAVs as they transmit health data. They could also monitor the whereabouts of people that require rapid medical attention. The Global Positioning System (GPS) is used to accurately localize UAVs, although it has communication challenges owing to bad weather, which could result in poor accuracy and signal reception. Because UAVs must connect to BANs in emergency zones or during severe weather, further research is needed to establish localization methods in this approach.
Routing protocols are critical for allowing several UAVs to transmit BAN data by determining the best and quickest way. Path scheduling is among the primary issues with UAVs and to determine an ideal travel trajectory for UAVs, and alternative techniques are required, particularly in disaster situations. UAVs could be able to adapt to position-based navigation. However, because of the movement of UAVs, it frequently fails to find an ideal path, necessitating additional research in this area.
6. Conclusions
This work is based on an IoT Based Health Monitoring system which makes the monitoring process along with diagnosis easier for the doctor as well as the patient. The proposed project is considered to be economical, and it can be easily manufactured on a large scale, and it is a smart device. Fritzing software was used for designing the circuit and developing the PCB layout. Several sensors and ICs, namely DHT11, MAX30102, Myoware, K24C16 and a Raspberry Pi camera, were used in the proposed HMS model. This device can be further upgraded to add various other sensors to gather more data from the patient and can be remotely accessed by medical specialists. Currently, there is only a video function integrated with the system; however, the future scope can focus on audio integration with the system and also a patient history tab that can project the previous scan or diagnosis reports of the patient. This system is optimized for the complete solution in a health monitoring setup. There is no need to take any extra hassle to install this device on the patient’s body. With just the touch of a finger, the doctor can easily measure the patient’s body parameters. A novel inclusion to this work is to measure multiple parameters such as temperature, humidity, blood pressure, heart rate, and SpO and provide a detailed analysis of all of them. The video storage is another notable functionality which is included in the design model, and the addition of an entirely secure log-in page along with a Role Based Access control is another novel feature of this work. The experimental research on various machine learning techniques adds value to the proposed work by predicting the performance of the system through various machine learning techniques with the desired level of accuracy. The performance and the result production of the whole system is thus evaluated and justified for the purpose of this proposed work.
Author Contributions
Conceptualization, N.S.; methodology, N.S., M.K.N.; software, V.R.; validation, N.S.; formal analysis, N.S., M.K.N.; investigation, N.S.; resources, M.K.N., V.R.; data curation, V.R.; writing—original draft preparation, N.S.; writing—review and editing, M.S., B.P.B.; visualization, N.S.; supervision, B.P.B.; project administration, M.S.; funding acquisition, M.S. All authors have read and agreed to the published version of the manuscript.
Funding
No Funding acquired for this work.
Data Availability Statement
Data are real-time data recorded with UAV and sensors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, X.; Ma, M.; Liu, A. Dynamic power management and adaptive packet size selection for IoT in e-Healthcare. Comput. Electr. Eng. 2018, 65, 357–375. [Google Scholar] [CrossRef]
- Internet of Things (IoT) Devices. Available online: http://businessresearcher.sagepub.com/sbr-1863-102197-2772812/20170306/more-than-28-billion-devices-connect-via-internet-of-things (accessed on 16 December 2017).
- Sujithra, M.; Padmavathi, G. Internet of Things—An Overview. World Sci. News 2016, 41, 208–213. [Google Scholar]
- Internet of Things (IOT) in Healthcare Market Size, Share: 2022–27: Industry Trends. Internet of Things (IoT) in Healthcare Market Size, Share | 2022–27 | Industry Trends. Available online: https://www.mordorintelligence.com/industry-reports/internet-of-things-in-healthcare-market (accessed on 10 July 2022).
- Cao, H.-R.; Zhan, C. A Novel Emergency Healthcare System for Elderly Community in Outdoor Environment. Wirel. Commun. Mob. Comput. 2018, 2018, 7841026. [Google Scholar] [CrossRef]
- Chola, C.; Heyat, M.B.; Akhtar, F.; Al Shorman, O.; V, B.B.; Muaad, A.Y.; Masadeh, M.; Alkahatni, F. IOT based intelligent computer-aided diagnosis and decision-making system for Health Care. In Proceedings of the 2021 International Conference on Information Technology (ICIT), Amman, Jordan, 14–15 July 2021. [Google Scholar] [CrossRef]
- Chu, L.; Li, X.; Xu, J.; Neiat, A.G.; Liu, X. A Holistic Service Provision Strategy for Drone-as-a-Service in MEC-based UAV Delivery. In Proceedings of the 2021 IEEE International Conference on Web Services (ICWS), Chicago, IL, USA, 5–10 September 2021; pp. 669–674. [Google Scholar] [CrossRef]
- Subramaniyaswamy, V.; Manogaran, G.; Logesh, R.; Vijayakumar, V.; Chilamkurti, N.; Malathi, D.; Senthilselvan, N. An ontology-driven personalized food recommendation in IoT-based healthcare system. J. Supercomput. 2019, 75, 3184–3216. [Google Scholar] [CrossRef]
- Verma, P.; Sood, S.K.; Kalra, S. Cloud-centric IoT based student healthcare monitoring framework. J. Ambient. Intell. Humaniz. Comput. 2018, 9, 1293–1309. [Google Scholar] [CrossRef]
- Su, W.; Delima, A.J.P.; Machica, I.K.D.; Arroyo, J.C.T.; Pan, X. An AED-UAV Healthcare Information Robot Integration System Based on Edge Computing Airport Station. In Proceedings of the 2022 the 5th International Conference on Robot Systems and Applications (ICRSA) (ICRSA 2022), Shenzhen, China, 23–25 April 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 29–36. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, X.; Deng, R.H. Lightweight break-glass access control system for healthcare Internet-of-Things. IEEE Trans. Ind. Inform. 2018, 14, 3610–3617. [Google Scholar] [CrossRef]
- Gupta, V.; Singh Gill, H.; Singh, P.; Kaur, R. An energy efficient fog-cloud based architecture for healthcare. J. Stat. Manag. Syst. 2018, 21, 529–537. [Google Scholar] [CrossRef]
- Sethuraman, T.V.; Rathore, K.S.; Amritha, G.; Kanimozhi, G. IoT based system for Heart Rate Monitoring and Heart Attack Detection. Int. J. Eng. Adv. Technol. (IJEAT) 2019, 8, 1459–1464. [Google Scholar]
- Li, C.; Hu, X.; Zhang, L. The IoT-based heart disease monitoring system for pervasive healthcare service. In Proceedings of the International Conference on Knowledge Based and Intelligent Information and Engineering Systems, KES2017, Marseille, France, 6–8 September 2017. [Google Scholar]
- Aggarwal, S.; Kumar, N.; Alhussein, M.; Muhammad, G. Blockchain-Based UAV Path Planning for Healthcare 4.0: Current Challenges and the Way Ahead. IEEE Netw. 2021, 35, 20–29. [Google Scholar] [CrossRef]
- Haleem, A.; Javaid, M.; Singh, R.P.; Suman, R.; Rab, S. Blockchain technology applications in healthcare: An overview. Int. J. Intell. Netw. 2021, 2, 130–139. [Google Scholar] [CrossRef]
- Galán-Jiménez, J.; Vegas, A.G.; Berrocal, J. Energy-efficient deployment of IoT applications in remote rural areas using UAV networks. In Proceedings of the 2022 14th IFIP Wireless and Mobile Networking Conference (WMNC), Sousse, Tunisia, 17–19 October 2022; pp. 70–74. [Google Scholar] [CrossRef]
- Mukhopadhyay, A.; Ganguly, D. FANET based Emergency Healthcare Data Dissemination. In Proceedings of the 2020 Second International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 15–17 July 2020; pp. 170–175. [Google Scholar] [CrossRef]
- Vangimalla, S.R.; El-Sharkawy, M. Interoperability Enhancement in Health Care at Remote Locations using Thread Protocol in UAVs. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2821–2826. [Google Scholar] [CrossRef]
- Ganesan, G.S.; Mokayef, M. Multi-Purpose Medical Drone for the Use in Pandemic Situation. In Proceedings of the 2021 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 7–8 October 2021; pp. 188–192. [Google Scholar] [CrossRef]
- Tazrin, T.; Ayaz, Z.; Fouda, M.M.; Fadlullah, Z.M. On Energy-Efficient UAV Route Scheduling to Offload Health Data from Under-Served Rural Communities. In Proceedings of the 2021 IEEE International Conference on Internet of Things and Intelligence Systems (IoTaIS), Bandung, Indonesia, 23–24 November 2021; pp. 86–91. [Google Scholar] [CrossRef]
- Gregoski, M.J.; Mueller, M.; Vertegel, A.; Shaporev, A.; Jackson, B.B.; Frenzel, R.M.; Sprehn, S.M.; Treiber, F.A. Development and validation of a smartphone heart rate acquisition application for health promotion and wellness telehealth applications. Int. J. Telemed. Appl. 2012, 2012, 696324. [Google Scholar] [CrossRef] [PubMed]
- Desai, M.R.; Toravi, S. A smart sensor interface for smart homes and heart beat monitoring using WSN in IoT environment. In Proceedings of the 2017 International Conference on Current Trends in Computer, Electrical, Electronics and Communication (CTCEEC), Mysore, India, 8–9 September 2017; pp. 74–77. [Google Scholar]
- Jaiswal, S.; Katake, R.; Kute, B.; Ranjane, S.; Mehetre, P.D. Survey of Health Monitoring Management Using Internet of Things (IOT). Int. J. Sci. Res. 2017, 5, 2243–2246. [Google Scholar]
- Pantelopoulos, A.; Bourbakis, N.G. A survey on wearable sensor-based systems for health monitoring and prognosis. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2010, 40, 1–2. [Google Scholar] [CrossRef]
- Malokar, S.N.; Mali, S.D. A IoT Based Health Care Monitoring System. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2017, 6, 4661–4667. [Google Scholar]
- Gupta, N.; Saeed, H.; Jha, S.; Chahande, M.; Pandey, S. IOT based health monitoring systems. In Proceedings of the International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Amity Institute of Telecommunication Engineering and Management. Amity University Uttar Pradesh, Noida, India, 17–18 March 2017. [Google Scholar]
- Kajaree, D.; Behera, R. A Survey on Healthcare Monitoring System Using Body Sensor Network. Int. J. Innov. Res. Comput. Commun. Eng. 2017, 5, 1302–1309. [Google Scholar]
- Naren, N.; Chamola, V.; Baitragunta, S.; Chintanpalli, A.; Mishra, P.; Yenuganti, S.; Guizani, M. IoMT and DNN-Enabled Drone-Assisted Covid-19 Screening and Detection Framework for Rural Areas. IEEE Internet Things Mag. 2021, 4, 4–9. [Google Scholar] [CrossRef]
- Mohammed, A.; Erbad, A.; Nahom, H.; Albaseer, A.; Abdallah, M.; Guizani, M. FDRL Approach for Association and Resource Allocation in Multi-UAV Air-To-Ground IoMT Network. TechRxiv 2022. [Google Scholar] [CrossRef]
- Jia, F.; Song, Y. UAV Automation Control System Based on an Intelligent Sensor Network. J. Sens. 2022, 2022, 7143194. [Google Scholar] [CrossRef]
- Razdan, S.; Sharma, S. Internet of Medical Things (IoMT): Overview, Emerging Technologies, and Case Studies. IETE Tech. Rev. 2022, 39, 775–788. [Google Scholar] [CrossRef]
- Khan, A.A.; Laghari, A.A.; Gadekallu, T.R.; Shaikh, Z.A.; Javed, A.R.; Rashid, M.; Estrela, V.V.; Mikhaylov, A. A drone-based data management and optimization using metaheuristic algorithms and blockchain smart contracts in a secure fog environment. Comput. Electr. Eng. 2022, 102, 108234. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).