Abstract
Air pollution (AP) is a significant environmental issue that poses a potential threat to human health. Its adverse effects on human health are diverse, ranging from sensory discomfort to acute physiological reactions. As such, air quality evaluation (AQE) serves as a crucial process that involves the collection of samples from the environment and their analysis to measure AP levels. With the proliferation of Internet of Things (IoT) devices and sensors, real-time and continuous measurement of air pollutants in urban environments has become possible. However, the data obtained from multiple sources of IoT sensors can be uncertain and inaccurate, posing challenges in effectively utilizing and fusing this data. Meanwhile, differences in opinions among decision-makers regarding AQE can affect the outcome of the final decision. To tackle these challenges, this paper systematically investigates a novel multi-attribute group decision-making (MAGDM) approach based on hesitant trapezoidal fuzzy (HTrF) information and discusses its application to AQE. First, by combining HTrF sets (HTrFSs) with multi-granulation rough sets (MGRSs), a new rough set model, named HTrF MGRSs, on a two-universe model is proposed. Second, the definition and property of the presented model are studied. Third, a decision-making approach based on the background of AQE is constructed via utilizing decision-making index sets (DMISs). Lastly, the validity and feasibility of the constructed approach are demonstrated via a case study conducted in the AQE setting using experimental and comparative analyses. The outcomes of the experiment demonstrate that the presented architecture owns the ability to handle multi-source IoT sensor data (MSIoTSD), providing a sensible conclusion for AQE. In summary, the MAGDM method presented in this article is a promising scheme for solving decision-making problems, where HTrFSs possess excellent information description capabilities and can adequately describe indecision and uncertainty information. Meanwhile, MGRSs serve as an outstanding information fusion tool that can improve the quality and level of decision-making. DMISs are better able to analyze and evaluate information and reduce the impact of disagreement on decision outcomes. The proposed architecture, therefore, provides a viable solution for MSIoTSD facing uncertainty or hesitancy in the AQE environment.
1. Introduction
AP [,] is a matter of paramount concern to both the environment and public health, brought about by the contamination of air by chemical, physical, or biological agents. This deleterious phenomenon is known to have far-reaching implications in the agricultural industry [], as it has been demonstrated to cause acid rain, reduced crop production, and inferior soil fertility. Notably, AP is a leading contributor to the global climate change crisis, resulting in more severe weather patterns across the globe []. Recent studies have provided compelling evidence to suggest that exposure to AP is linked to several negative health outcomes, including developmental delays in children [], increased risk of mental illnesses such as depression [], and poor reproductive health in females []. In this light, AP is currently one of the most significant risk factors affecting global health. According to a survey by the European Environment Agency (EEA) in 2020, 96% of city residents in the European Union were exposed to higher than recommended levels of fine particulate matter, according to the World Health Organization (WHO) [], resulting in 238,000 premature deaths. Furthermore, WHO has conducted extensive research on the effects of AP and found that environmental and household AP cause approximately 6.7 million deaths per year, with 2.4 billion people exposed to hazardous levels of household AP.
AQE is an indispensable tool for comprehending the state of air quality and forecasting its future trends. The objective of AQE is to mitigate the deleterious impact of AP and foster a healthy atmospheric environment, and, thus, it has become a prominent research topic in recent years [,]. Numerous scholars have conducted research in various directions via using different approaches in the context of AQE. For instance, Oprea [] utilized an expert system to carry out research on knowledge modeling for better analysis of AP in city regions. Wang et al. [] proposed a deep convolutional neural network method for predicting AP. Gu et al. [] suggested a new fuzzy multiple linear regression model to forecast the air quality index [,,]. However, AQE, using neural networks, necessitates an adequate amount of training examples to ensure sufficient training of the model, and AQE based on expert systems requires frequent manual maintenance and manipulation of the AQE knowledge base, which hinder the accuracy guarantee. With the widespread adoption of IoT technologies [,,,], sensor networks have become increasingly popular for collecting air quality data from multiple sources. IoT sensors [] are capable of collecting and transmitting data in real time, providing a dynamic understanding of AP patterns by continuous and high-resolution measurements of air quality parameters. The use of MSIoTSD allows for a more comprehensive and accurate assessment of air quality. However, the accuracy and reliability of MSIoTSD [] can be affected by various factors, leading to uncertain data. Moreover, effectively utilizing and fusing MSIoTSD presents a challenge. In contrast, AQE, using fuzzy methods, not only overcomes the limitations of the aforementioned approaches, but can also effectively deal with multi-source uncertain data. Furthermore, AQE is influenced by several factors, including different locations, attributes, and times, which can be established as a typical MAGDM problem.
This paper primarily examines and resolves the AQE issue from three perspectives. First, we investigate a fuzzy approach applied to AQE in the context of HTrFSs during the information description process. Second, we use MGRSs to fuse multiple sources of AQE data during the information fusion stage process. Finally, we employ DMISs to diminish the impact of inconsistent opinions of individual decision-makers within a decision group on the decision outcome during the information analysis process. Based on the analysis above, we recall the components of HTrFSs and MGRSs below.
1.1. A Brief Review of HTrFSs
Zadeh [] proposed the theory of fuzzy sets to describe various fuzzy concepts of reality in 1965. However, classical fuzzy sets have their own limitations when dealing with multiple sources of uncertain information. Therefore, scholars have explored generalized fuzzy sets in depth [,,,]. Hesitant fuzzy sets (HFSs), which represent generalized fuzzy sets describing hesitant information, were proposed by Torra []. HFSs permit the membership degree of elements belonging to a set to consist of multiple possible values. Since the creation of HFSs, many experts have researched HFSs from various perspectives, and a series of achievements have been obtained. For instance, Divsalar et al. [] presented a novel TODIM approach using the Choquet integral in a probabilistic hesitant fuzzy environment. Krishankumar et al. [] proposed a novel decision framework with completely unknown weight information in the context of interval-valued probabilistic HFSs. Ahmad et al. [] proposed an innovative resolution of multi-objective optimization issues by applying hesitant fuzzy aggregation operators. Fuzzy data serve as a type of data that are imprecise or have uncertain sources. Trapezoidal fuzzy numbers (TrFNs) have more advantages in describing fuzzy data compared with simple real-valued numbers, as they contain a specific interval with a full membership rank. Therefore, Ye [] introduced the concept of HTrFSs, which takes advantage of the unique benefits of TrFNs and HFSs. The distinctive advantages of HTrFSs in dealing with uncertain information have prompted scholars to conduct a substantial number of theoretical and practical explorations [,].
1.2. A Brief Review of MGRSs
Granular computing (GrC) has emerged as a structured solution model for addressing large-scale complicated problems by simulating human thinking and replacing exact solutions with feasible satisfactory approximations that meet the needs of actual problems. As a novel concept and computing paradigm in artificial intelligence, GrC has revolutionized the traditional understanding of computing and holds great value in tackling complex problems [,]. Zadeh introduced the concept of fuzzy information granulation in 1979 [], and, after years of research, officially presented the concept of GrC in 1997 []. With continuous research and development efforts, GrC has been widely utilized and refined [,,].
The rough set theory is a prominent GrC model that was first proposed by Pawlak [] in 1982. However, due to the overly stringent requirements for equivalence relations in classical rough set models, scholars have extended rough sets from different aspects [,,]. In terms of relations, Qian et al. introduced optimistic and pessimistic styles of MGRSs [] to describe issues through multiple binary relations, thereby enhancing the ability of multi-source information systems to handle uncertain information. In recent years, many generalized MGRSs have been developed to cater to the diverse needs of users [,,,]. In terms of universes, decision-makers can express decision information more accurately on two universes [] than on a single universe. Sun and Ma [] further proposed the theory of MGRSs on two-universe. The MGRSs on two-universe can effectively describe complex real-world information. For instance, in AQE, it is essential to consider the relationship between locations and air pollutants. This relationship consists of two distinct types of objects that belong to different universes. Furthermore, MGRSs on two-universe offer both optimistic and pessimistic information fusion strategies, which are valuable for risk-seeking and risk-averse decision-making, respectively. This allows the integration of diverse opinions from various experts, leading to a consensus through the integration of multiple binary relations. Thus, MGRSs on two-universe serve as an excellent information fusion strategy. Therefore, the research on the MGRSs theory of two universes and its application has made significant progress [,,]. Moreover, the probabilistic soft logic has also shown remarkable performance in handling uncertain information and integrating multiple sources of information. In recent years, researchers have applied this approach to a wide range of fields. For instance, Gu et al. [] proposed a novel approach for extracting temporal information about complex medicine by integrating the probabilistic soft logic and textual feature feedback. Alshukaili et al. [] presented a technique for structuring linked data search results by leveraging the probabilistic soft logic. Fakhraei et al. [] developed a network-based method for predicting drug-targeted interactions using the probabilistic soft logic.
1.3. Study Motivations
This paper explores an MAGDM approach based on HTrF MGRSs and its applications in AQE. In the following, we introduce some of the main study motivations.
- As AQE plays a crucial role in measuring air quality to reduce air pollution, there is a pressing need to explore further methods in AQE. Consequently, we intend to propose a new collaborative multi-granularity architecture to AQE.
- HTrFSs demonstrate superior capabilities in handling hesitant and uncertain data, while MGRSs exhibit excellent performance in multi-source information fusion. Thus, we intend to synergistically combine HTrFSs and MGRSs to present a novel model.
- Considering that the opinions of different experts within a decision-making group may differ significantly, it is imperative to utilize DMISs to mitigate the impact of disagreement on the outcome of decisions.
1.4. Contributions of This Article
By combining the above research motivations, this article presents the following innovative ideas.
- An HTrF MGRS two-universe model is proposed, and some properties and definitions are discussed.
- A novel MAGDM method is constructed by utilizing HTrF, MGRSs, and DMISs, and applying them to the AQE.
This paper is structured as below. In Section 2, we review the fundamental concept of HTrFSs and MGRSs on two-universe. In Section 3, we develop the concept of HTrF MGRSs and introduce the related properties. In Section 4, we present an MAGDM method based on HTrF MGRSs. Then, we give an application of the presented approach to AQE and analyze it in comparison with other approaches in Section 5. In Section 6, we summarize the article and discuss several options for research in the future.
Furthermore, we add a table to this paper to provide readers with easy-to-find explanations of any abbreviations used in the text, as shown in Abbreviations section.
2. Basic Knowledge
For a better understanding, this section introduces the fundamental concepts of HTrFSs and MGRSs.
2.1. HTrFSs
HTrFSs have shown flexibility in handling hesitant, inaccurate information. Before introducing the notion of HTrFSs, we first present the TrFN.
Definition 1
([]). A fuzzy number is called a TrFN when its membership function is denoted as:
where , and the closed interval and stand for the lower, mode, upper limits of , respectively.
Afterward, we review the fundamental understanding of HTrFSs.
Definition 2
([]). Suppose is a universe. An HTrFS on is expressed as:
where represents the possible degree of memberships of in , and is the set containing all trapezoidal values in . Moreover, is named as an HTrF element, and the set of all HTrFSs on is expressed as .
As the rules for the operations of HTrFSs support decision-making processes to efficiently analyze data, we present the laws for the operations of HTrFSs below.
Definition 3
([]). Suppose is a universe. , , then:
- The complement of , expressed as , is given by , .
- The intersection of and , expressed as , is given by , .
- The union of and , expressed as , is given by , .
The utilization of score functions represents a pivotal approach for the selection of the optimal alternative in HTrF MAGDM problems; hence, we discuss the following notion of HTrF score functions.
Definition 4
([]). For an HTrF element, , , where is the number of TrFNs in . For two HTrF elements, and , if , then .
To compare two HTrFSs, it is necessary to propose a new definition; hence, we present the notion of HTrF subsets below.
Definition 5.
Suppose is a universe. , , if is true for every , such that , , , , then is mentioned as an HTrF subset of , expressed as . It is evident that is anti-symmetric, reflexive, and transitive on .
2.2. MGRSs on Two-Universe
MGRSs on two-universe have outstanding performance in multi-source information fusion, and we recall the fundamental definitions of MGRSs on two-universe below.
Definition 6
([]). Suppose , are two universes, and is a binary compatibility relation family over , in respect to a family of binary mapping , , . Then, the MG approximation space on two-universe is expressed as .
Definition 7
([]). Suppose and are two binary mappings over . , the pessimistic and optimistic lower and upper MG approximations in the matter of are expressed as:
The pair and are referred to as a pessimistic MGRS on two-universe and an optimistic MGRS on two-universe, respectively.
This section offers a comprehensive overview of the theoretical foundations underlying TrFNs, HTrFSs, HTrF score functions and subsets, as well as MGRSs on two-universe. First, we present the definition of TrFNs and proceed to discuss the fundamental definition and operation rules of HTrFSs. Subsequently, we introduce the definition of HTrF score functions and HTrF subsets. Moreover, we provide a brief introduction to the basic concepts of optimistic and pessimistic MGRSs on two-universe.
3. HTrF MGRSs on Two-Universe
This section systematically discusses the notion of HTrF MGRSs on two-universe. First, a definition of HTrF relations (HTrFRs) on two-universe is given.
Definition 8.
An HTrFR on is given by:
where represents the possible degree of memberships of . For convenience, the set of all HTrFRs on is expressed as .
Then, we extend the HTrFRs on two-universe to the context of MGRSs.
3.1. Optimistic HTrF MGRSs on Two-Universe
Definition 9.
Suppose , are two universes, is an HTrFR over . Moreover, an HTrF MG approximation space on two-universe is expressed as . , the definitions of optimistic HTrF MG lower and upper approximations on two-universe of are given below:
where ;
.
The pair indicates an optimistic HTrF MGRS on two-universe of in the matter of .
Theorem 1.
Suppose , are two universes, is an HTrFR over . , the optimistic HTrF MG lower and upper approximations on two-universe meet these properties:
- (1)
- , ;
- (2)
- , ;
- (3)
- , ;
- (4)
- , .
Proof.
- (1)
- , we have .
is similarly obtained.
- (2)
- Because of , depending on Definition 5, we have ,,,, so and and and . Therefore, we have .
is similarly obtained.
- (3)
- , we have , , , , , , similarly, is obtained.
- (4)
- Based on the above findings, it is easily obtained that and .
□
In Theorem 1, (1) states the complement of optimistic HTrF MGRSs on two-universe; (2) states the monotone of optimistic HTrF MGRSs on two-universe in the matter of various HTrF targets; (3) states the multiplication of optimistic HTrF MGRSs on two-universe; (4) states the addition of optimistic HTrF MGRSs on two-universe.
Theorem 2.
Suppose , are two universes, , are two HTrFRs on . If , , the properties below are satisfied:
- (1)
- , ;
- (2)
- , .
Proof.
Because of , depending on Definition 5, we have , and , and , and .
Thus, it can be seen that ,, , , , , . Therefore, we have .
Similarly, is obtained. □
Theorem 2 states that the optimistic HTrF MG lower and upper approximations on two-universe exhibit monotonicity in the matter of the monotonic forms of multiple HTrFRs.
3.2. Pessimistic HTrF MGRSs on Two-Universe
Definition 10.
Suppose , are two universes. is an HTrFR over . Moreover, an HTrF MG approximation space on two-universe is expressed as . , the definitions of pessimistic HTrF MG lower and upper approximations on two-universe of are given below:
where ;
.
The pair indicates a pessimistic HTrF MGRS on two-universe of in the matter of .
Theorem 3.
Suppose are two universes. is an HTrFR over . , the pessimistic HTrF MG lower and upper approximations on two-universe meet these properties:
- (1)
- , ;
- (2)
- , ;
- (3)
- , ;
- (4)
- , .
In Theorem 3, (1) states the complement of pessimistic HTrF MGRSs on two-universe; (2) states the monotone of pessimistic HTrF MGRSs on two-universe in the matter of various HTrF targets; (3) states the multiplication of pessimistic HTrF MGRSs on two-universe; (4) states the addition of pessimistic HTrF MGRSs on two-universe.
Theorem 4.
Suppose are two universes. , are two HTrFRs on . If , , the properties below are satisfied:
- (1)
- , ;
- (2)
- , ;
Theorem 4 states the pessimistic HTrF MG lower and upper approximations on two-universe exhibit monotonicity in the matter of the monotonic forms of multiple HTrFRs.
3.3. Relationships between Optimistic and Pessimistic HTrF MGRSs on Two-Universe
Theorem 5.
Suppose , are two universes. is an HTrFR over . , the optimistic and pessimistic HTrF MG lower and upper approximations on two-universe meet these properties:
- (1)
- ;
- (2)
- .
Proof.
, . is similarly obtained. □
Theorem 5 states that the optimistic HTrF MG lower approximation includes the pessimistic HTrF MG lower approximation, and the pessimistic HTrF MG upper approximation includes the optimistic HTrF MG upper approximation.
Remark 1.
This section presents a novel model, named HTrF MGRSs, on two-universe. The model combines the advantages of HTrFSs with MGRSs, which serves as a powerful tool to effectively deal with the AQE issue. The HTrFSs integrate HFSs with TrFNs, which offer a robust and flexible way of representing uncertain and imprecise AQE MSIoTSD. Compared to other fuzzy numbers, TrFNs demonstrate higher stability and are less susceptible to minor parameter variations. Furthermore, the various shapes of their membership functions enable them to capture fuzzy concepts in a flexible manner, reflecting real-world scenarios more accurately. Meanwhile, HFSs enable the expression of expert knowledge fully, as they allow the assignment of multiple membership values to an object, thus effectively representing the uncertainty and fuzziness in human reasoning. In the AQE process, determining the optimal solution requires the evaluation results provided by different experts. However, these experts may have distinct viewpoints on AQE. MGRSs on two-universe are distinguished by their remarkable information fusion capabilities, which enable the integration of distinct evaluation results from numerous experts via the provision of pessimistic and optimistic strategies, ultimately leading to a consensus and agreement. In summary, the proposed HTrF MGRSs model on two-universe has the potential to improve AQE decision ability and provide sound conclusions for AQE.
This section presents an HTrF MGRSs on two-universe model. Initially, we provide a precise definition of HTrFRs. Building upon this definition, we subsequently introduce two types of HTrF MGRSs, specifically optimistic and pessimistic HTrF MGRSs. In order to establish the theoretical foundation for the proposed model, we proceed to analyze and prove the fundamental properties of both optimistic and pessimistic HTrF MGRSs on two-universe.
4. The AQE Approach
The present section illustrates a novel MAGDM method to solve the AQE issue, utilizing the presented model based on HTrF MGRSs on two-universe. The key steps of our MAGDM method are as follows.
4.1. Application Model
We consider as a set of geographical locations and as a set of air quality attributes. Suppose are HTrFRs on , which represents the HTrF AQE information provided by experts. Then, we suppose is the air quality testing sample. Thus, an HTrF decision information system in terms of AQE is obtained.
Subsequently, we propose an MAGDM method using HTrF MGRSs on two-universe. First, based on Definitions 9 and 10, we compute the optimistic and pessimistic HTrF MG lower and upper approximations on two-universe of , respectively. Then, we attain the sets , , , and . Depending on the rules of operations in []: , we get the sets and . Furthermore, according to the decision strategy proposed by Sun et al. [], we propose the decision rules for AQE based on HTrF MGRSs over two universes. Initially, we indicated that:
where , , denote the DMISs that consist of subscripts of the biggest HTrF element in the corresponding HTrFSs , and , respectively. In accordance with Definition 4, the computation of the values of the score function for the HTrF elements in the corresponding HTrFSs mentioned above is feasible. Subsequently, we can easily obtain the , , and index sets. Next, we will discuss the practical implications of the three DMISs described above. Optimistic MGRSs are founded on the principle of “seeking common ground while preserving differences”, i.e., retaining both the same and inconsistent parts of the opinions given by different experts, which can be regarded as a relatively risky risk-seeking approach to information fusion; whereas, pessimistic MGRSs are founded on the principle of “seeking common ground while excluding differences”, i.e., retaining the same parts of the opinions given by different experts and removing different opinions and claims, which can be regarded as a relatively conservative risk-averse approach to information fusion. Thus, is the optimistic evaluation result, is the pessimistic evaluation result, and is the weighted evaluation result of and , with a weighted value of 0.5. According to the definitions above, the decision rules are given by:
- In case , that is the optimal location.
- In case , but also , that is the optimal location.
- In case , but also , that is the optimal location.
4.2. The Algorithm Based on HTrF MGRSs on Two-Universe for AQE
In the following, we summarize the specific steps of the proposed method, and Algorithm 1 is further listed in terms of the specific steps.
Input: An HTrF decision information system .
Output: The optimal location.
Step1: Calculate the optimistic and pessimistic HTrF MG lower and upper approximations on two-universe of , respectively.
Step2: Calculate optimistic and pessimistic HTrF MGRSs on two-universe of , respectively.
Step3: Calculate .
Step4: Calculation of three types of DMISs.
Step5: Obtain the optimal location according to the decision rules.
| Algorithm 1 The algorithm based on HTrF MGRSs over two universes for AQE. |
| Require: An HTrF decision information system . Ensure: The optimal location. 1 for to , to , to do 2 Compute , , , and , respectively. 3 end for 4 for to do 5 Compute and , respectively. 6 end for 7 for to do 8 Compute . 9 end for 10 for to do 11 Calculate , and . 12 end for 13 Calculate , , and determine the optimal location. |
Remark 2.
In the above steps, we set the number of locations as , the number of attributes as , and the number of experts as . The first step has a complexity of . For the subsequent steps, i.e., steps 2 to 4, the complexity is represented as . Then, the complexity of the last step is denoted as . Consequently, the overall complexity of the proposed algorithm is represented as .
In this section, we introduce a novel MAGDM method based on HTrF MGRSs on two-universe. We begin by introducing the HTrF decision information system. Subsequently, we describe the specific steps of the proposed MAGDM method in detail. Then, we apply the proposed method to AQE and propose a specific algorithm for this domain. Additionally, we conduct a complexity analysis of the proposed algorithm to assess its computational efficiency.
5. Case Analysis
The present section showcases the viability of the proposed MAGDM approach within the realm of AQE by means of a practical case study. Additionally, a comprehensive series of comparative and experimental analyses are executed to validate the efficacy of the presented approach.
5.1. Case Study in the Background of AQE
This study utilizes the AQE data of 31 provincial capital cities in China (https://www.aqistudy.cn/historydata/, accessed on 16 April 2023). Specifically, we employ six air pollutants, namely , , , , , and , to determine the level of air quality, and consider the data from February, March, June, September, October, and December in the years 2018, 2019, and 2020 as decision-makers. Then, we define the set of 31 cities as , while the set of attributes are defined as , where represents , represents , represents , represents , represents , and represents . Next, we assume as the evaluation information, and let the values of the air quality test sample be the average values on . Furthermore, we process the obtained data to convert it into fuzzy data, which is done by applying the formula: . Here, denotes the raw value of air pollutant for city , while represents the corresponding fuzzy data. Subsequently, we convert the fuzzy data to HTrF data. In particular, we denote , , , , , and as the corresponding fuzzy data for February, March, June, September, October, and December, respectively. Next, we can obtain the corresponding HTrF element represented as . By following this process, we obtain the HTrF decision information system.
Then, we will follow the steps of the proposed algorithm to compute. First, we calculate , , , and , respectively. Next, we further get and . Then, we calculate the values of the score function for the HTrF elements in the corresponding sets ,, and , respectively. Thus, it is easy to get , which implies that is the optimal location and is Haikou City.
5.2. Comparative Analysis
To establish the efficacy of the presented approach, the present section demonstrates that the MAGDM approach based on HTrF MGRSs is efficient by comparing different similar methods through comparative experiments. Set is a compromise that combines the optimistic and pessimistic scenarios, and its ranking results have the advantage of being comprehensive. Thus, we use the ranking results of the above set for comparative analysis.
5.2.1. Comparative Analysis with Classic HTrF MAGDM Approaches
First, we conduct a comparison of the proposed approach with several classical HTrF MAGDM methods, including HTrF averaging (HTrFA) operators, HTrF geometric (HTrFG) operators, HTrF Einstein averaging (HTrFEA) operators, HTrF Einstein geometric (HTrFEG) operators, the HTrF VIKOR method, the HTrF TOPSIS method, and the improved HTrF TOPSIS method. The HTrF VIKOR method ranks alternatives by maximizing group utility and minimizing individual regret values. The HTrF TOPSIS method sorts alternatives according to their distance from the ideal solution. Despite its effectiveness, the optimal solution selected by the HTrF TOPSIS method may not always be the nearest to the positive ideal solution and the most distant from the negative ideal solution simultaneously. Thus, the improved HTrF TOPSIS approach utilizes an improved approach for calculating the relative closeness coefficient based on the HTrF TOPSIS approach. Our comparative findings are shown in Figure 1.
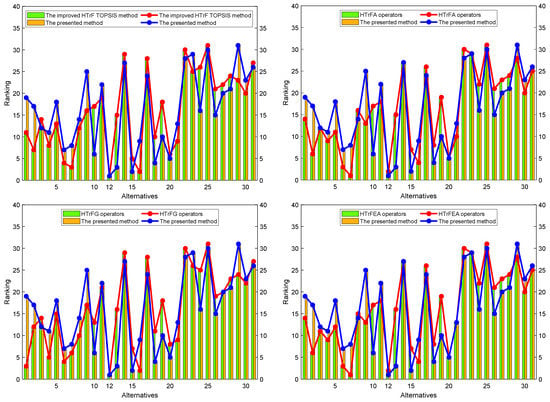
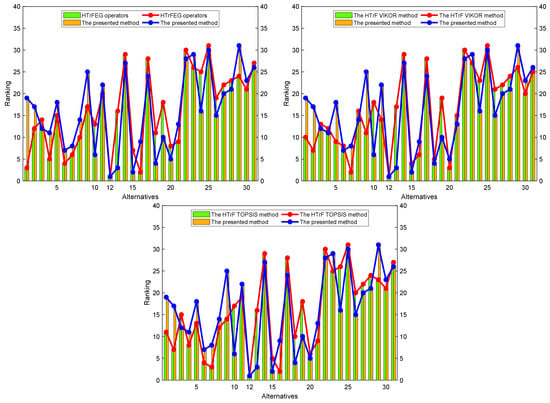
Figure 1.
Comparison with classical HTrF MAGDM methods.
It is apparent from Figure 1 that there is minimal disparity between the ranking conclusions derived from various methodologies. The approach presented in this study aligns with the optimal schemes adopted by HTrFG operators, HTrFEG operators, the HTrF VIKOR method, the HTrF TOPSIS method, and the improved HTrF TOPSIS method. While the optimal scheme selected by HTrFA operators and HTrFEA operators does not correspond with the methodology proposed in this paper, the overall trend remains consistent. This observation provides compelling evidence for the validity of the presented methodology.
5.2.2. Comparative Analysis with the HTrF MABAC Method
This study next employs the Multi-Attributive Border Approximation area Comparison (MABAC) [] approach to conduct a comparative analysis. The fundamental assumption of this method is to define the distance between the alternatives and the boundary approximation zone. In the MABAC method, each alternative is evaluated and ranked based on the difference in the specified distances. Notably, the MABAC method is distinguished by its mathematical simplicity and the stability of its evaluation results. It also takes into consideration the potential value of gains and losses and produces comprehensive results. Therefore, it is essential to compare the presented approach with the MABAC approach to validate the efficacy of the proposed approach. The conclusions of the comparison between this presented method and the HTrF MABAC method are shown in Figure 2.
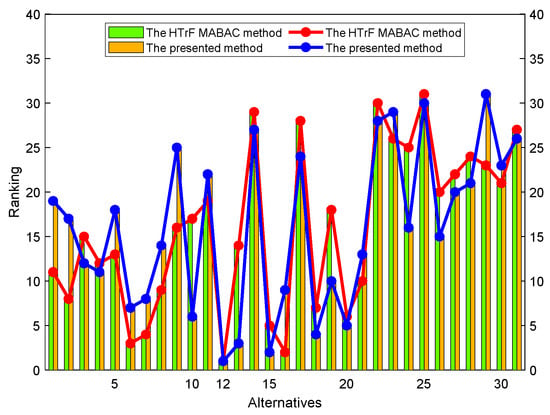
Figure 2.
Comparison with the HTrF MABAC method.
From Figure 2, it is incontrovertible that the presented methodology and the HTrF MABAC approach demonstrate a congruous overall trend, and, more notably, select the same optimal scheme. This observation serves as further evidence of the efficacy and soundness of the proposed methodology.
5.3. Experimental Analysis
The Spearman correlation coefficient is widely utilized in statistical analysis as a non-parametric measure for evaluating the correlation between two variables. It employs a monotonic function to gauge the correlation strength between two statistical variables. In this article, we apply the Spearman correlation coefficient to assess the relevance of the method presented in this article in comparison to other similar methods. The number of ranking positions for the presented approach and other approaches are denoted as and , respectively. Hence, the Spearman correlation coefficient can be conveniently calculated as . The results of this analysis are shown in Table 1 and Figure 3.

Table 1.
Spearman correlation coefficient between the presented approach and similar approaches.
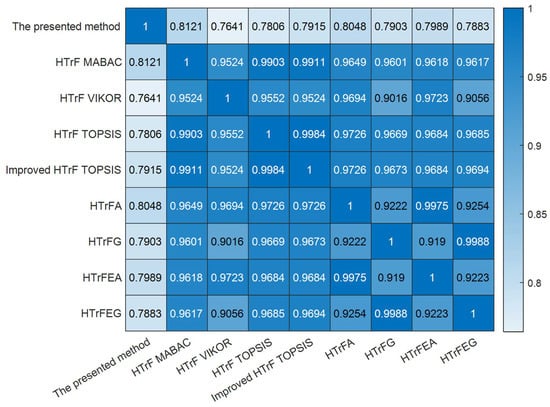
Figure 3.
Spearman correlation coefficient between different methods.
According to the above experimental analysis, the correlation between the presented MAGDM approach and other comparable approaches is relatively strong, which validate the validity and stability of the proposed MAGDM approach.
Remark 3.
It is important to note that the Equation can only be applied when all ranks are unique integers, with representing the difference between the two ranks of each observation and indicating the total number of observations. This condition must be satisfied in order for the equation to be valid and accurate in the calculation of the Spearman correlation coefficient.
Furthermore, we summarize the advantages of the presented method, as shown in Table 2.
Table 2.
The advantage of different approaches.
5.4. Discussion
Deep learning algorithms, such as Convolutional Neural Networks, have been successful in various applications. However, for MAGDM problems, they may not always be the optimal solution. It should be noted that Convolutional Neural Networks and their variations require the data to be divided into training and testing sets. While the conventional division practice is usually to allocate 80% of the data to training and 20% to testing, discrepancies in the ratio of training to testing data allocation, as well as the stochasticity of the division process, may lead to dissimilar outcomes.
Regarding the data used in this study, the dataset included weather information for 367 cities in China from December 2013 onwards. However, for the purpose of demonstration, we selected some data from 31 provincial capital cities from 2018 to 2020 as our sample. We took great care to ensure that the selected sample represents the characteristics and distribution of the entire dataset. Nevertheless, future studies could use larger datasets or incorporate additional attributes to improve the accuracy and generalizability of the proposed method.
The experimental results outlined above demonstrate that the decision-making method based on HTrF MGRSs on two-universe represents a comprehensive utilization of the strengths of HTrFSs and MGRSs. First, HTrFSs offer significant advantages over other fuzzy sets by allowing for a more precise representation of fuzzy or imprecise information through TrFNs. Moreover, HTrFSs combine the advantages of HFSs to enable decision-makers to express their hesitations or uncertainties during the decision-making process, thus enabling them to consider all possible scenarios and make more informed decisions. Then, the MGRSs on two-universe approach serves as an excellent information fusion strategy that integrates the perspectives of different experts to arrive at a final conclusion. Furthermore, we leverage DMISs to mitigate the impact of disagreements among the experts within the expert group on the evaluation outcomes. By incorporating DMISs, the presented MAGDM method offers a multifaceted evaluation scheme to experts, allowing them to attain more sensible and precise evaluation results. In summary, the MAGDM method presented in this article substantially reduces the uncertainty involved in decision-making and enhances its accuracy and reliability. By combining the advantages of HTrFSs, MGRSs, and DMISs, the proposed approach provides a viable option for assessment and decision-making in situations of uncertainty and fuzziness. The proposed approach demonstrates the potential for solving decision problems in various domains.
Regarding the AQE in different cities, the experimental results indicate that the air quality in Haikou is relatively good, whereas the air quality in Xining and Taiyuan is relatively poor. First, the successful experience of Haikou city demonstrates that economic development and environmental protection are not mutually exclusive. Therefore, the government should actively strengthen ecological construction and protection to improve air quality. Second, with sustained government control, recent data reveals that the overall air quality in Xining has improved, suggesting the critical role of governance in improving air quality. For cities such as Taiyuan, where coal is the main source of energy and coal burning and industrial pollution are the main sources of pollution, the government should actively promote the transformation of the energy structure, reduce dependence on coal, promote clean energy, control the emissions from industrial pollution sources, and promote other measures to reduce the emission of atmospheric pollutants. In summary, the government should formulate and implement relevant policies and measures to improve urban air quality and enhance residents’ quality of life.
This section presents a comprehensive case study that demonstrates the validity and feasibility of the proposed MAGDM method within the domain of AQE. The evaluation employs comparative and experimental analysis to showcase the effectiveness of the proposed approach. We begin by providing a detailed description of the experimental procedure. Subsequently, we conduct a comparative analysis, where we compare and contrast the proposed MAGDM method with several classical HTrF MAGDM methods and the HTrF MABAC method. Moreover, we compute the Spearman correlation coefficient and plot a graph that compares the proposed method with other similar methods. The advantages of the proposed method are also presented in tabular format. Finally, a comprehensive discussion and analysis is presented, which includes a discussion of the limitations of deep learning methods, a detailed analysis of the datasets used in this paper, the potential of the proposed method, and the implications of this paper’s research for government work.
6. Conclusions
AQE plays a crucial role in creating and maintaining a clean atmospheric environment. In this article, we introduce a novel MAGDM method to AQE. First, we propose an HTrF MGRS on two-universe model by combining the advantages of HTrFSs in information representation and MGRSs in information fusion. Then, we investigate the fundamental definitions and properties of optimistic and pessimistic HTrF MGRSs on two-universe. Afterward, we present a general approach to the AQE decision problem. Finally, we conduct several numerical analyses, using AQE-related datasets, to showcase the feasibility, effectiveness, and stability of the presented MAGDM approach.
While the proposed architecture presents a promising solution for AQE, there are still several challenging issues in theoretical and practical research. We recommend the exploration of the following research directions in the future:
- Realistic decision-making scenarios are diverse; hence, it is essential to extend the application of the presented MAGDM approach to other real-world contexts, such as water quality testing, forest fire prediction, disease diagnosis, etc.
- Further exploration of property reduction methods and uncertainty measures for HTrF MGRSs on two-universe has important implications for the application of the presented MAGDM method to other uncertain and complicated decision scenarios.
- Large-scale MAGDM can leverage the complementary knowledge structures of large groups of people to enhance the precision and objectivity of decision-making. As such, it is imperative to explore large-scale MAGDM to tackle intricate practical situations.
Author Contributions
Conceptualization, C.Z.; software, W.L.; formal analysis, W.L., Y.C. and J.S.; investigation, J.S.; writing—original draft preparation, W.L.; writing—review and editing, C.Z.; visualization, Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was partially funded by the 20th Undergraduate Innovation and Entrepreneurship Training Program of Shanxi University (No. X2022020043), the Special Fund for Science and Technology Innovation Teams of Shanxi (No. 202204051001015).
Data Availability Statement
The dataset utilized in this research is available from https://www.aqistudy.cn/historydata/ (accessed on 16 April 2023).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| AP | Air pollution | AQE | Air quality evaluation |
| MAGDM | Multi-attribute group decision-making | HTrF | Hesitant trapezoidal fuzzy |
| HTrFSs | Hesitant trapezoidal fuzzy sets | HTrFRs | Hesitant trapezoidal fuzzy relations |
| MGRSs | Multi-granulation rough sets | EEA | European environment agency |
| HFSs | Hesitant fuzzy sets | GrC | Granular computing |
| WHO | World health organization | TrFNs | Trapezoidal fuzzy numbers |
| HTrFA | Hesitant trapezoidal fuzzy averaging | HTrFG | Hesitant trapezoidal fuzzy geometric |
| HTrFEA | Hesitant trapezoidal fuzzy Einstein averaging | HTrFEG | Hesitant trapezoidal fuzzy Einstein geometric |
| DMISs | Decision-making index sets | IoT | Internet of Things |
| MSIoTSD | Multi-source Internet of Things sensor data | MABAC | Multi-attributive border approximation area comparison |
References
- de Santos, U.P.; Arbex, M.A.; Braga, A.L.F.; Mizutani, R.F.; Cançado, J.E.D.; Terra-Filho, M.; Chatkin, J.M. Environmental air pollution: Respiratory effects. J. Bras. Pneumol. 2021, 47, e20200267. [Google Scholar] [CrossRef] [PubMed]
- González-Martín, J.; Kraakman, N.J.R.; Pérez, C.; Lebrero, R.; Muñoz, R. A state–of–the-art review on indoor air pollution and strategies for indoor air pollution control. Chemosphere 2021, 262, 128376. [Google Scholar] [CrossRef]
- Wei, W.; Wang, Z. Impact of industrial air pollution on agricultural production. Atmosphere 2021, 12, 639. [Google Scholar] [CrossRef]
- Michetti, M.; Gualtieri, M.; Anav, A.; Adani, A.; Benassi, B.; Dalmastri, C.; D’Elia, I.; Piersanti, A.; Sannino, G.; Zanini, G.; et al. Climate change and air pollution: Translating their interplay into present and future mortality risk for Rome and Milan municipalities. Sci. Total Environ. 2022, 830, 154680. [Google Scholar] [CrossRef] [PubMed]
- Caleyachetty, R.; Lufumpa, N.; Kumar, N.; Mohammed, N.I.; Bekele, H.; Kurmi, O.; Wells, J.; Manaseki-Holland, S. Exposure to household air pollution from solid cookfuels and childhood stunting: A population-based, cross-sectional study of half a million children in low- and middle-income countries. Int. Health 2022, 14, 639–647. [Google Scholar] [CrossRef] [PubMed]
- Latham, R.M.; Kieling, C.; Arseneault, L.; Rocha, T.B.M.; Beddows, A.; Beevers, S.D.; Danese, A.; de Oliveira, K.; Kohrt, B.A.; Moffitt, T.E.; et al. Childhood exposure to ambient air pollution and predicting individual risk of depression onset in UK adolescents. J. Psychiatr. Res. 2021, 138, 60–67. [Google Scholar] [CrossRef]
- Ahmed, M.; Shuai, C.; Abbas, K.; Rehman, F.U.; Khoso, W.M. Investigating health impacts of household air pollution on woman's pregnancy and sterilization: Empirical evidence from Pakistan, India, and Bangladesh. Energy 2022, 247, 123562. [Google Scholar] [CrossRef]
- Goshua, A.; Akdis, C.A.; Nadeau, K.C. World Health Organization global air quality guideline recommendations: Executive summary. Allergy 2022, 77, 1955–1960. [Google Scholar] [CrossRef]
- Huang, W.; Li, T.; Liu, J.; Xie, P.; Du, S.; Teng, F. An overview of air quality analysis by big data techniques: Monitoring, forecasting, and traceability. Inf. Fusion 2021, 75, 28–40. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, L.; Liao, H. Multi-pollutant air pollution and associated health risks in China from 2014 to 2020. Atmos. Environ. 2022, 268, 118829. [Google Scholar] [CrossRef]
- Oprea, M. A case study of knowledge modelling in an air pollution control decision support system. AI Commun. 2005, 18, 293–303. [Google Scholar]
- Wang, W.; Mao, W.; Tong, X.; Xu, G. A novel recursive model based on a convolutional long short-term memory neural network for air pollution prediction. Remote Sens. 2021, 13, 1284. [Google Scholar] [CrossRef]
- Gu, Y.; Zhao, Y.; Zhou, J.; Li, H.; Wang, Y. A fuzzy multiple linear regression model based on meteorological factors for air quality index forecast. J. Intell. Fuzzy Syst. 2021, 40, 10523–10547. [Google Scholar] [CrossRef]
- Ma, J.; Ma, X.; Yang, C.; Xie, L.; Zhang, W.; Li, X. An air pollutant forecast correction model based on ensemble learning algorithm. Electronics 2023, 12, 1463. [Google Scholar] [CrossRef]
- Gu, Y.; Li, B.; Meng, Q. Hybrid interpretable predictive machine learning model for air pollution prediction. Neurocomputing 2022, 468, 123–136. [Google Scholar] [CrossRef]
- Tao, Y.; Wu, Y.; Zhou, J.; Wu, M.; Wang, S.; Zhang, L.; Xu, C. How to realize the effect of air pollution control? A hybrid decision framework under the fuzzy environment. J. Clean. Prod. 2021, 305, 127093. [Google Scholar] [CrossRef]
- Martín-Baos, J.Á.; Rodriguez-Benitez, L.; García-Ródenas, R.; Liu, J. IoT based monitoring of air quality and traffic using regression analysis. Appl. Soft Comput. 2022, 115, 108282. [Google Scholar] [CrossRef]
- Sangaiah, A.K.; Rostami, A.S.; Hosseinabadi, A.A.R.; Shareh, M.B.; Javadpour, A.; Bargh, S.H.; Hassan, M.M. Energy-Aware geographic routing for Real-Time workforce monitoring in industrial informatics. IEEE Internet Things J. 2021, 8, 9753–9762. [Google Scholar] [CrossRef]
- Sangaiah, A.K.; Javadpour, A.; Ja’fari, F.; Pinto, P.; Zhang, W.; Balasubramanian, S. A hybrid heuristics artificial intelligence feature selection for intrusion detection classifiers in cloud of things. Clust. Comput. 2023, 26, 599–612. [Google Scholar] [CrossRef]
- Lin, M.; Huang, C.; Xu, Z.; Chen, R. Evaluating IoT platforms using integrated probabilistic linguistic MCDM method. IEEE Internet Things J. 2020, 7, 11195–11208. [Google Scholar] [CrossRef]
- Schilt, U.; Barahona, B.; Buck, R.; Meyer, P.; Kappani, P.; Möckli, Y.; Meyer, M.; Schuetz, P. Low-Cost sensor node for air quality monitoring: Field tests and validation of particulate matter measurements. Sensors 2023, 23, 794. [Google Scholar] [CrossRef] [PubMed]
- Dmytryk, N.; Leivadeas, A. A generic preprocessing architecture for Multi-Modal IoT sensor data in artificial general intelligence. Electronics 2022, 11, 3816. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Li, W.; Zhai, S.; Xu, W.; Pedrycz, W.; Qian, Y.; Ding, W.; Zhan, T. Feature selection approach based on improved fuzzy C-Means with principle of refined justifiable granularity. IEEE Trans. Fuzzy Syst. 2022. [Google Scholar] [CrossRef]
- Li, W.; Zhou, H.; Xu, W.; Wang, X.Z.; Pedrycz, W. Interval Dominance-Based feature selection for Interval-Valued ordered data. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Lin, M.; Wang, H.; Xu, Z. TODIM-based multi-criteria decision-making method with hesitant fuzzy linguistic term sets. Artif. Intell. Rev. 2020, 53, 3647–3671. [Google Scholar] [CrossRef]
- Lin, M.; Li, X.; Chen, R.; Fujita, H.; Lin, J. Picture fuzzy interactional partitioned Heronian mean aggregation operators: An application to MADM process. Artif. Intell. Rev. 2022, 55, 1171–1208. [Google Scholar] [CrossRef]
- Torra, V. Hesitant fuzzy sets. Int. J. Intell. Syst. 2010, 25, 529–539. [Google Scholar] [CrossRef]
- Divsalar, M.; Ahmadi, M.; Ebrahimi, E.; Ishizaka, A. A probabilistic hesitant fuzzy Choquet integral-based TODIM method for multi-attribute group decision-making. Expert Syst. Appl. 2022, 191, 116266. [Google Scholar] [CrossRef]
- Krishankumar, R.; Ravichandran, K.S.; Gandomi, A.H.; Kar, S. Interval-valued probabilistic hesitant fuzzy set-based framework for group decision-making with unknown weight information. Neural Comput. Appl. 2021, 33, 2445–2457. [Google Scholar] [CrossRef]
- Ahmad, F.; Adhami, A.Y.; John, B.; Reza, A. A novel approach for the solution of multiobjective optimization problem using hesitant fuzzy aggregation operator. RAIRO-Oper. Res. 2022, 56, 275–292. [Google Scholar] [CrossRef]
- Ye, J. Multicriteria decision-making method using expected values in trapezoidal hesitant fuzzy setting. J. Converg. Inf. Technol. 2013, 8, 135–143. [Google Scholar]
- Deli, I. Bonferroni mean operators of generalized trapezoidal hesitant fuzzy numbers and their application to decision-making problems. Soft Comput. 2021, 25, 4925–4949. [Google Scholar] [CrossRef]
- Deli, I.; Karaaslan, F. Generalized trapezoidal hesitant fuzzy numbers and their applications to multi criteria decision-making problems. Soft Comput. 2021, 25, 1017–1032. [Google Scholar] [CrossRef]
- Zhang, C.; Ding, J.; Zhang, J.; Sangaiah, A.K.; Li, D. Fuzzy intelligence learning based on bounded rationality in IoMT systems: A case study in parkinson’s disease. IEEE Trans. Comput. Soc. Syst. 2022. [Google Scholar] [CrossRef]
- Zhang, C.; Li, X.; Sangaiah, A.K.; Li, W.; Wang, B.; Cao, F.; Shangguan, X. Collaborative fuzzy linguistic learning to Low-Resource and robust decision system based on bounded rationality. ACM Trans. Asian Low-Resour. Lang. Inf. Process. 2023. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets and information granularity. Adv. Fuzzy Set Theory Appl. 1979, 11, 3–18. [Google Scholar]
- Zadeh, L.A. Toward a theory of fuzzy information granulation and its centrality in human reasoning and fuzzy logic. Fuzzy Sets Syst. 1997, 90, 111–127. [Google Scholar] [CrossRef]
- Zhan, T. Granular-based state estimation for nonlinear fractional control systems and its circuit cognitive application. Int. J. Cogn. Comput. Eng. 2023, 4, 1–5. [Google Scholar] [CrossRef]
- Zhang, C.; Li, D.; Liang, J. Interval-valued hesitant fuzzy multi-granularity three-way decisions in consensus processes with applications to multi-attribute group decision making. Inf. Sci. 2020, 511, 192–211. [Google Scholar] [CrossRef]
- Ren, X.; Li, D.; Zhai, Y. Research on mixed decision implications based on formal concept analysis. Int. J. Cogn. Comput. Eng. 2023, 4, 71–77. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Bai, J.; Sun, B.; Chu, X.; Wang, T.; Li, H.; Huang, Q. Neighborhood rough set-based multi-attribute prediction approach and its application of gout patients. Appl. Soft Comput. 2022, 114, 108127. [Google Scholar] [CrossRef]
- Abdullah, S.; Al-Shomrani, M.M.; Liu, P.; Ahmad, S. A new approach to three-way decisions making based on fractional fuzzy decision-theoretical rough set. Int. J. Intell. Syst. 2022, 37, 2428–2457. [Google Scholar] [CrossRef]
- Bai, H.; Li, D.; Ge, Y.; Wang, J.; Cao, F. Spatial rough set-based geographical detectors for nominal target variables. Inf. Sci. 2022, 586, 525–539. [Google Scholar] [CrossRef]
- Qian, Y.; Liang, J.; Yao, Y.; Dang, C. MGRS: A multi-granulation rough set. Inf. Sci. 2010, 180, 949–970. [Google Scholar] [CrossRef]
- Bai, W.; Zhang, C.; Zhai, Y.; Sangaiah, A.K. Incomplete intuitionistic fuzzy behavioral group decision-making based on multigranulation probabilistic rough sets and MULTIMOORA for water quality inspection. J. Intell. Fuzzy Syst. 2023, 44, 4537–4556. [Google Scholar] [CrossRef]
- Zhang, C.; Ding, J.; Zhan, J.; Li, D. Incomplete three-way multi-attribute group decision making based on adjustable multigranulation Pythagorean fuzzy probabilistic rough sets. Int. J. Approx. Reason. 2022, 147, 40–59. [Google Scholar] [CrossRef]
- Zhang, C.; Bai, W.; Li, D.; Zhan, J. Multiple attribute group decision making based on multigranulation probabilistic models, MULTIMOORA and TPOP in incomplete q-rung orthopair fuzzy information systems. Int. J. Approx. Reason. 2022, 143, 102–120. [Google Scholar] [CrossRef]
- Li, W.; Xu, W.; Zhang, X.; Zhang, J. Updating approximations with dynamic objects based on local multigranulation rough sets in ordered information systems. Artif. Intell. Rev. 2022, 55, 1821–1855. [Google Scholar] [CrossRef]
- Pei, D.; Xu, Z.B. Rough set models on two universes. Int. J. Gen. Syst. 2004, 33, 569–581. [Google Scholar] [CrossRef]
- Sun, B.; Ma, W. Multigranulation rough set theory over two universes. J. Intell. Fuzzy Syst. 2015, 28, 1251–1269. [Google Scholar] [CrossRef]
- Sun, B.; Zhou, X.; Lin, N. Diversified binary relation-based fuzzy multigranulation rough set over two universes and application to multiple attribute group decision making. Inf. Fusion 2020, 55, 91–104. [Google Scholar] [CrossRef]
- Yang, D.; Cai, M.; Li, Q.; Xu, F. Multigranulation fuzzy probabilistic rough set model on two universes. Int. J. Approx. Reason. 2022, 145, 18–35. [Google Scholar] [CrossRef]
- Zhang, C.; Li, D.; Liang, J. Multi-granularity three-way decisions with adjustable hesitant fuzzy linguistic multigranulation decision-theoretic rough sets over two universes. Inf. Sci. 2020, 507, 665–683. [Google Scholar] [CrossRef]
- Gu, J.; Wang, D.; Hu, D.; Gao, F.; Xu, F. Temporal extraction of complex medicine by combining probabilistic soft logic and textual feature feedback. Appl. Sci. 2023, 13, 3348. [Google Scholar] [CrossRef]
- Alshukaili, D.; Fernandes, A.A.A.; Paton, N.W. Structuring linked data search results using probabilistic soft logic. In Proceedings of the 15th International Semantic Web Conference (ISWC 2016), Kobe, Japan, 17–21 October 2016; pp. 3–19. [Google Scholar]
- Fakhraei, S.; Huang, B.; Raschid, L.; Getoor, L. Network-Based Drug-Target interaction prediction with probabilistic soft logic. IEEE/ACM Trans. Comput. Biol. Bioinform. 2014, 11, 775–787. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Ranking fuzzy numbers in the setting of possibility theory. Inf. Sci. 1983, 30, 183–224. [Google Scholar] [CrossRef]
- Sun, B.; Ma, W.; Zhao, H. A fuzzy rough set approach to emergency material demand prediction over two universes. Appl. Math. Model. 2013, 37, 7062–7070. [Google Scholar] [CrossRef]
- Pamučar, D.; Ćirović, G. The selection of transport and handling resources in logistics centers using Multi-Attributive Border Approximation area Comparison (MABAC). Expert Syst. Appl. 2015, 42, 3016–3028. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).