
Road-Network-Based Event Information System in a Cooperative ITS Environment
 ,
,
Abstract
:1. Introduction
- Even without calculating the exact coordinates of an event recognized by a vehicle, it is possible to upload road event information. We solved the problem of difficulty in accurately estimating the location of an object recognized by a camera in a vehicle.
- Duplicate handling of information simultaneously recognized by multiple vehicles is possible. We solved the problem of difficulty in distinguishing or unifying when an object (road event) is observed from multiple angles and recognized in various coordinates.
- It is possible to determine traffic congestion based on vehicle travel speed per road standard link. We were able to derive additional meaningful data from the collected vehicle information.
- It is possible to select vehicles for information provision per road standard link. By providing event information only to vehicles that are actually affected by events, we reduced the provision of unnecessary information and ensured the driver’s freedom of route selection. Additionally, we improved the reliability of the event information provided, preventing the “boy-who-cried-wolf” problem, whereby drivers ignore frequent unreliable event information.
2. Background and Related Work
2.1. C-ITSs and C-AVs
2.2. Road Network Defined by Standard Nodes/Links
2.3. Related Work
2.3.1. Road Event Detection Method
2.3.2. Road Information System
3. System Architecture and Components
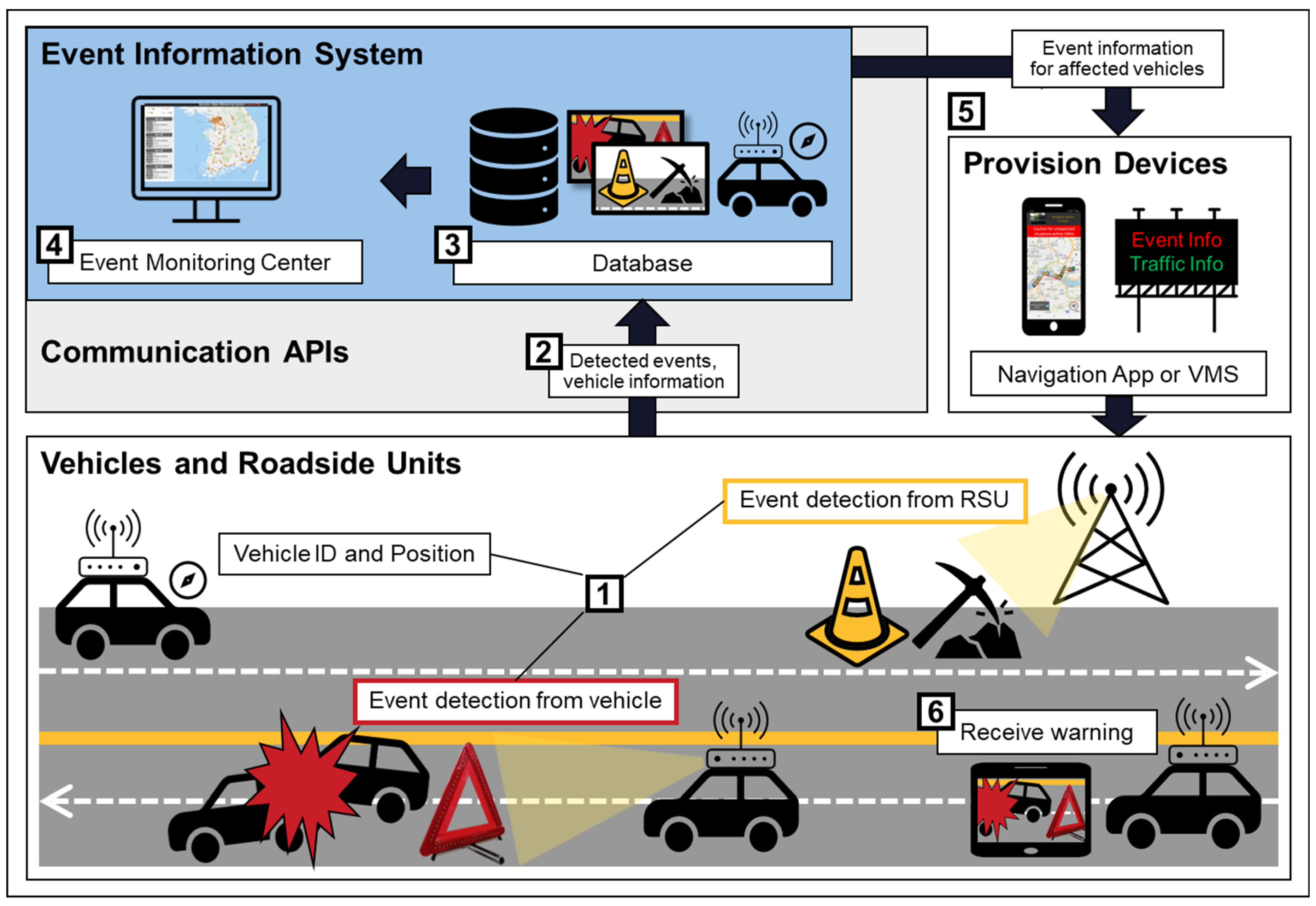
3.1. System Overview
- Event detection: RSUs, including smart CCTVs, automatically recognize sudden events. Alternatively, operators can identify events through CCTV monitoring or recognize anticipated events (such as demonstrations or forecasted weather conditions). Sensor-equipped vehicles can also automatically recognize sudden events while driving. Additionally, it is assumed that vehicles equipped with devices are aware of their own ID and location information (referred to as detector information).
- Event information transmission: Road equipment, operators, and equipped vehicles transmit recognized event information with detector information (i.e., detector ID and position) to the database.
- Event information integration: The database processes, integrates, and stores detector information and event information.
- Event information monitoring: Operators at a monitoring center oversee the status of sudden events nationwide and handle their closure.
- Event information provision: Current sudden event information is received from the navigation app server and the RSU server, such as variable message signs (VMS).
- Event information reception: Sudden event information is provided to vehicles on roads affected by the sudden event through vehicle navigation apps or RSUs installed on the affected road. Target vehicles receive warning messages regarding sudden events that may affect them in the future.
3.2. Overall System Functional Architecture
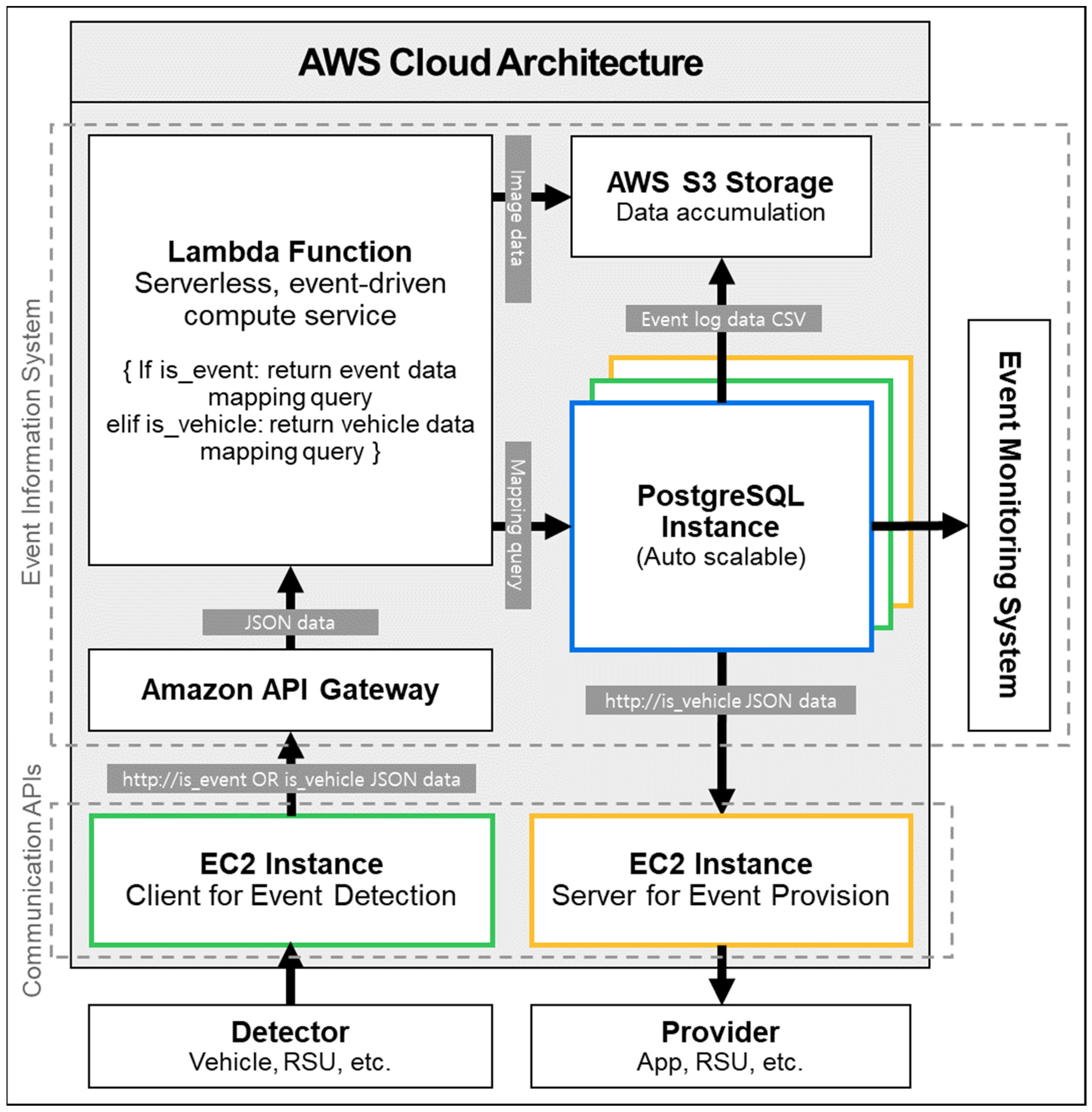
3.3. Cloud System Architecture
- EC2 (elastic compute cloud). Real-time incident data can be queried through the Open API provided by the National ITS Traffic Information Center. To receive real-time data updates, clients who periodically request data from the API server are required. Therefore, to run this client, an EC2 cloud computing service was allocated and built.
- Amazon API Gateway. Each EC2 client parses its data and requests the lambda function through the Amazon API Gateway. To accommodate this, the API Gateway is configured to save the data in a specified parameter format when it is entered.
- Lambda function. The lambda function layer operates without a separate server, it processes designated events as they occur. Events are defined as occurrences where vehicle information and real-time incident information access the API Gateway. When this event occurs, the data are passed to the lambda function as a parameter, as defined in 2. The lambda function then maps the parameters to the appropriate query based on whether the event is a vehicle information event or a real-time incident information event and commands PostgreSQL to insert or update the data.
- PostgreSQL instance and AWS S3. The system was built using PostgreSQL instances allocated through the AWS relational database service. Because read/write operations occur frequently when a new event occurs, the instances are designed to horizontally scale to distribute the load when the specified load is exceeded. Data that is no longer needed in real-time due to the end of an incident or the passage of time is stored in S3 in a timely manner to avoid overloading the database with real-time operations, and it is then deleted from the database.
3.4. Spatial Database System
3.5. Event Monitoring Web Server
3.6. Information Provision App
4. Event Information Collection Based on Road Network
4.1. Vehicle-Equipment-Based Event Information Collection
4.1.1. Collection Method
4.1.2. Collection Format
4.1.3. Privacy
4.2. Road-Equipment-Based Event Information Collection
5. Integration and Processing of Event Information Based on Road Network
5.1. Link-Finding Algorithm
5.2. Event Duplication Handling
5.3. Congestion Detection Algorithm
| Algorithm 1 Congestion Detection |
| Require: vehicle information with standard link data D if a change in the D is detected by database trigger then if there is not link_entry_time then link_entry_time to now end if if there is a link_entry_time then link_avg_spd to (now − link_entry_time) / link_length end if end if |
5.4. Selecting Links in the Affected Area
6. Experiment
6.1. Prototype Implementation
6.2. Experiment Scenario
- Four vehicles equipped with data collection devices automatically recognize dummy events (safety signs) in the driving environment.
- The four vehicles send their own information and the recognized event data to the database through the API. (Verification of event information collection function)
- The database receives event information transmitted in real-time from the vehicles and Open API event information from the National Traffic Information Center, and processes and integrates them using the implemented algorithm. Road operators check the event information in real time on the monitoring website linked to the database. (Verification of event information integration and processing function)
- One minute after the four lead vehicles start data collection, the following vehicle drives along the same route.
- The information provision app used in the following vehicle provides event information and warning notifications in connection with the database. (verification of event information provision in 1 min)
6.3. Experiment Results
6.3.1. Results of Event Information Collection and Integration
6.3.2. Event Information Processing Results
6.3.3. Event Information Provision Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ETSI. TR 102 v1.1.1 2011-06 Intelligent Transport Systems (Its); Vehicular Communications; Basic Set of Applications; Local Dynamic Map (ldm); Rationale for and Guidance on Standardization. Available online: https://www.etsi.org (accessed on 24 May 2023).
- Chakraborty, P.; Sharma, A.; Hegde, C. Freeway traffic incident detection from cameras: A semi-supervised learning approach. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1840–1845. [Google Scholar] [CrossRef]
- An Unexpected Accident on the Road, AI CCTV Finds It and Informs You in 1 Minute [Website]. Available online: https://www.yna.co.kr/view/AKR20200427164700003 (accessed on 24 May 2023).
- Gokasar, I.; Timurogullari, A.; Özkan, S.S.; Deveci, M.; Lv, Z. MSND: Modified standard normal deviate incident detection algorithm for connected autonomous and human-driven vehicles in mixed traffic. IEEE Trans. Intell. Transp. Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Shin, S.; Kim, J.; Moon, C. Road dynamic object mapping system based on edge-fog-cloud computing. Electronics 2021, 10, 2825. [Google Scholar] [CrossRef]
- Ali, K.; Al-Yaseen, D.; Ejaz, A.; Javed, T.; Hassanein, H.S. CrowdITS: Crowdsourcing in intelligent transportation systems. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 3307–3311. [Google Scholar] [CrossRef]
- Rettore, P.H.L.; Santos, B.P.; Lopes, R.R.F.; Maia, G.; Villas, L.A.; Loureiro, A.A.F. Road data enrichment framework based on heterogeneous data fusion for ITS. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1751–1766. [Google Scholar] [CrossRef]
- Ishigami, K.; Enoki, M.; Oguchi, M. Event Information Search Method from SNS Data considering Privacy of User’s Location Information. In Proceedings of the 2022 IEEE International Conference on Smart Computing (SMARTCOMP), Helsinki, Finland, 20–24 June 2022; pp. 240–245. [Google Scholar] [CrossRef]
- ISO/TR 21186-1:2021(en); Cooperative Intelligent Transport Systems (C-ITS)—Guidelines on the Usage of Standards—Part 1: Standardization Landscape and Releases. ISO: Geneva, Switzerland, 2021.
- Korean National Transport Information Center [Website]. (n.d.). Available online: https://www.its.go.kr/opendata/ (accessed on 24 May 2023).
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L.; Li, W. A vision of C-V2X: Technologies, field testing, and challenges with Chinese development. IEEE Internet Things J. 2020, 7, 3872–3881. [Google Scholar] [CrossRef]
- Uzcátegui, R.A.; De Sucre, A.J.; Acosta-Marum, G. Wave: A tutorial. IEEE Commun. Mag. 2009, 47, 126–133. [Google Scholar] [CrossRef]
- Festag, A. Cooperative intelligent transport systems standards in Europe. IEEE Commun. Mag. 2014, 52, 166–172. [Google Scholar] [CrossRef]
- Gerla, M.; Lee, E.K.; Pau, G.; Lee, U. Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds. In Proceedings of the IEEE World Forum on Internet of Things (WF-IoT), Seoul, Republic of Korea, 6–8 March 2014; pp. 241–246. [Google Scholar] [CrossRef]
- Yu, Y.; Shan, D.; Benderius, O.; Berger, C.; Kang, Y. Formally Robust and Safe Trajectory Planning and Tracking for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22971–22987. [Google Scholar] [CrossRef]
- Introducing Node/Link [Website]. (n.d.). Available online: https://www.its.go.kr/nodelink/ (accessed on 24 May 2023).
- Phillips, J.D.; Schwanghart, W.; Heckmann, T. Graph theory in the geosciences. Earth Sci. Rev. 2015, 143, 147–160. [Google Scholar] [CrossRef]
- ESRI. (July 1998). ESRI Shapefile Technical Description. Available online: http://www.esri.com/library/whitepapers/pdfs/shapefile.pdf (accessed on 24 May 2023).
- Weil, R.; Wootton, J.; García-Ortiz, A. Traffic incident detection: Sensors and algorithms. Math. Comput. Model. 1998, 27, 257–291. [Google Scholar] [CrossRef]
- Thakare, K.V.; Dogra, D.P.; Choi, H.; Kim, H.; Kim, I.J. Object interaction-based localization and description of road accident events using deep learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20601–20613. [Google Scholar] [CrossRef]
- Schreier, M.; Willert, V.; Adamy, J. Grid mapping in dynamic road environments: Classification of dynamic cell hypothesis via tracking. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3995–4002. [Google Scholar] [CrossRef]
- Wang, J.; Li, X.; Liao, S.S.; Hua, Z. A sshybrid approach for automatic incident detection. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1176–1185. [Google Scholar] [CrossRef]
- Yu, Y.; Shi, C.; Shan, D.; Lippiello, V.; Yang, Y. A hierarchical control scheme for multiple aerial vehicle transportation systems with uncertainties and state/input constraints. Appl. Math. Model. 2022, 109, 651–678. [Google Scholar] [CrossRef]
- Roy, B.; Patnaik, S.; Dutta, P. Congestion Detection Techniques in Road Network. In Proceedings of the 2021 Smart City Challenges & Outcomes for Urban Transformation (SCOUT), Bhubaneswar, India, 25–26 December 2021; pp. 252–255. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.; Yoo, A.; Moon, C. Design and Implementation of Edge-Fog-Cloud System through HD Map Generation from LiDAR Data of Autonomous Vehicles. Electronics 2020, 9, 2084. [Google Scholar] [CrossRef]
- Fukumoto, J.; Sirokane, N.; Ishikawa, Y.; Wada, T.; Ohtsuki, K.; Okada, H. Analytic method for real-time traffic problems by using Contents Oriented Communications in VANET. In Proceedings of the 2007 7th International Conference on ITS Telecommunications, Sophia Antipolis, France, 6–8 June 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Ku, I.; Lu, Y.; Gerla, M.; Gomes, R.L.; Ongaro, F.; Cerqueira, E. Towards software-defined VANET: Architecture and services. In Proceedings of the 2014 13th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; pp. 103–110. [Google Scholar]
- Rybicki, J.; Scheuermann, B.; Koegel, M.; Mauve, M. Peertis: A peer-to-peer traffic information system. In Proceedings of the Sixth ACM International Workshop on VehiculAr InterNETworking, VANET’09, Beijing, China, 25 September 2009; ACM: New York, NY, USA, 2009; pp. 23–32. [Google Scholar] [CrossRef]
- Zimányi, E.; Sakr, M.; Lesuisse, A. MobilityDB: A mobility database based on PostgreSQL and PostGIS. ACM Trans. Database Syst. 2020, 45, 1–42. [Google Scholar] [CrossRef]
- NAVER Maps API Overview [Website]. (n.d.). Available online: https://guide.ncloud-docs.com/docs/en/naveropenapiv3-maps-overview (accessed on 24 May 2023).
- T Map API [Website]. (n.d.). Available online: https://tmapapi.sktelecom.com/index.html (accessed on 24 May 2023).
- Escher, S.; Sontowski, M.; Berling, K.; Köpsell, S.; Strufe, T. How well can your car be tracked: Analysis of the European C-ITS pseudonym scheme. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Frankel, S.; Glenn, R.; Kelly, S. The AES-CBC Cipher Algorithm and Its Use with IPsec (No. rfc3602); RFC Editor: USA, 2003; Available online: https://www.rfc-editor.org/rfc/rfc3602 (accessed on 10 April 2023).
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Tian, Y.; Yang, G.; Wang, Z.; Wang, H.; Li, E.; Liang, Z. Apple detection during different growth stages in orchards using the improved YOLO-V3 model. Comput. Electron. Agric. 2019, 157, 417–426. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute Name | Attribute Domain |
|---|---|
| NODE_ID | Node id |
| NODE_TYPE | Node type code |
| NODE_NAME | Node name |
| TURN_P | Turn restrictions true/false |
| REMARK | Note |
| COORDINATES | Node geometry |
| Attribute Name | Attribute Domain |
|---|---|
| LINK_ID | Link id |
| F_NODE | Start node id |
| T_NODE | End node id |
| LANES | Num of lanes |
| ROAD_RANK | Road rank code |
| ROAD_TYPE | Road type code |
| ROAD_NO | Road number |
| ROAD_NAME | Road name |
| ROAD_USE | Road use true/false |
| MULTI_LINK | Multilink true/false |
| CONNECT | Connect roads true/false |
| MAX_SPD | Max speed |
| REST_VEH | Restricted vehicle code |
| REST_W | Restricted weight |
| REST_H | Restricted height |
| LENGTH | Link length |
| REMARK | Note |
| Attribute Name | Attribute Domain |
|---|---|
| NODE_ID | Node id |
| TURN_ID | Turn restriction id |
| ST_LINK | Start link id |
| ED_LINK | End link id |
| TURN_TYPE | Turn-type code |
| TURN_OPER | Turn operation code |
| REMARK | Note |
| Attribute Name | Attribute Domain |
|---|---|
| EVENT_TYPE | Event type |
| EVENT_DETAIL_TYPE | Event detail type |
| LINK_ID | Detected link id |
| START_DATE | Start date |
| END_DATE | End date |
| COORDINATES | Detected position |
| IMAGE_PATH | Saved image path in the image server |
| DETECTOR_ID | Event detector id |
| Attribute Name | Attribute Domain |
|---|---|
| VEHICLE_ID | Vehicle id |
| COORDINATES | Vehicle position (latitude, longitude, altitude) |
| HEADING | Vehicle GPS heading |
| LINK_ID | Current coordinate link id |
| LINK_START_TIME | Current link entry time |
| PREV_LINK_START_TIME | Previous link entry time |
| PREV_LINK_ID | Previous link id |
| Attribute Name | Attribute Domain |
|---|---|
| TYPE | Road type |
| EVENT_TYPE | Event type |
| EVENT_DETAIL_TYPE | Event detail type |
| START_DATE | Start date |
| END_DATE | End date |
| COORD_X | Longitude |
| COORD_Y | Latitude |
| LINK_ID | Link id |
| ROAD_NAME | Road name |
| ROAD_NO | Road number |
| ROAD_DRC_TYPE | Road direction type |
| LANES_BLOCK_TYPE | Lane block type |
| LANES_BLOCKED | Lanes blocked |
| MESSAGE | Event message |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Hong, D.; Kim, J.; Cha, D.; Choi, H.; Moon, J.; Moon, C. Road-Network-Based Event Information System in a Cooperative ITS Environment. Electronics 2023, 12, 2448. https://doi.org/10.3390/electronics12112448
Lee K, Hong D, Kim J, Cha D, Choi H, Moon J, Moon C. Road-Network-Based Event Information System in a Cooperative ITS Environment. Electronics. 2023; 12(11):2448. https://doi.org/10.3390/electronics12112448
Chicago/Turabian StyleLee, Kieun, Dongwon Hong, Juhyun Kim, Dongkeun Cha, Hyunmin Choi, Jeongmin Moon, and Changjoo Moon. 2023. "Road-Network-Based Event Information System in a Cooperative ITS Environment" Electronics 12, no. 11: 2448. https://doi.org/10.3390/electronics12112448